This journal utilises an Online Peer Review Service (OPRS) for submissions. By clicking "Continue" you will be taken to our partner site https://mc.manuscriptcentral.com/jfm. Please be aware that your Cambridge account is not valid for this OPRS and registration is required. We strongly advise you to read all "Author instructions" in the "Journal information" area prior to submitting.
A wide class of problems for free-surface gravity waves fall into a weakly dispersive regime, in which wavelength is large compared to water depth, and wave phase speed differs by a small amount from the speed  $c_{0}=\sqrt{gh}$ of shallow-water waves. The resulting problem is treated naturally using Taylor series expansions of dependent variables in the vertical coordinate, leading to a class of models that are collectively referred to here as Boussinesq-type models. Madsen & Fuhrman (J. Fluid Mech., vol. 889, 2020, A38) have recently shown that certain members of this broad class of models are subject to a high-wavenumber instability, which can grow rapidly when the elevation of the wave trough is sufficiently depressed below the mean water surface. This newly revealed instability may provide an explanation for the modelling community’s frequent observations of noisy behaviour in Boussinesq-type model calculations.
$c_{0}=\sqrt{gh}$ of shallow-water waves. The resulting problem is treated naturally using Taylor series expansions of dependent variables in the vertical coordinate, leading to a class of models that are collectively referred to here as Boussinesq-type models. Madsen & Fuhrman (J. Fluid Mech., vol. 889, 2020, A38) have recently shown that certain members of this broad class of models are subject to a high-wavenumber instability, which can grow rapidly when the elevation of the wave trough is sufficiently depressed below the mean water surface. This newly revealed instability may provide an explanation for the modelling community’s frequent observations of noisy behaviour in Boussinesq-type model calculations.
The highly convoluted interface separating the turbulent and non-turbulent regions in a turbulent mixing layer is experimentally investigated using the particle image velocimetry (PIV) technique. The mixing layer was generated using a fine screen/mesh in one half of the test section of a low-speed wind tunnel. The PIV data, which were acquired with high spatial resolution in the self-similar regime of the flow, allow us to identify the turbulent/non-turbulent interface (TNTI) using a suitable threshold value of the absolute spanwise vorticity,  $|\unicode[STIX]{x1D714}_{z}|$. The threshold values for the top and bottom interfaces of the mixing layer are found to be different, and the probability density function (PDF) of the interface position for both the interfaces is found to follow the Gaussian distribution. Interestingly, the PDF of the interface orientation reveals two clear peaks, and this is attributed to the sustained large-scale motions in a mixing layer, compared to the other free-shear flows, as is also substantiated by further analyses such as the linear stochastic estimation and the conditional analysis of the transverse velocity profile. The linear stochastic analysis also shows the presence of large vorticity structures of the order of the Taylor microscale at the mean TNTI location in a mixing layer. Furthermore, the present work reveals that, using the spanwise component of vorticity alone, we can experimentally identify and estimate the thickness of the viscous superlayer from the conditional profiles of the diffusion term and the correlation coefficient of the dissipation and the diffusion terms in the enstropy transport equation. The present value of the viscous superlayer thickness of
$|\unicode[STIX]{x1D714}_{z}|$. The threshold values for the top and bottom interfaces of the mixing layer are found to be different, and the probability density function (PDF) of the interface position for both the interfaces is found to follow the Gaussian distribution. Interestingly, the PDF of the interface orientation reveals two clear peaks, and this is attributed to the sustained large-scale motions in a mixing layer, compared to the other free-shear flows, as is also substantiated by further analyses such as the linear stochastic estimation and the conditional analysis of the transverse velocity profile. The linear stochastic analysis also shows the presence of large vorticity structures of the order of the Taylor microscale at the mean TNTI location in a mixing layer. Furthermore, the present work reveals that, using the spanwise component of vorticity alone, we can experimentally identify and estimate the thickness of the viscous superlayer from the conditional profiles of the diffusion term and the correlation coefficient of the dissipation and the diffusion terms in the enstropy transport equation. The present value of the viscous superlayer thickness of  $5\unicode[STIX]{x1D702}$–
$5\unicode[STIX]{x1D702}$– $6\unicode[STIX]{x1D702}$ (where
$6\unicode[STIX]{x1D702}$ (where  $\unicode[STIX]{x1D702}$ is the Kolmogorov length scale) compares well with the values reported in the literature for other shear flows. Although both the interfaces are found to behave like a fractal with a dimension of 1.3 in two dimensions, one can find dominant length scales of the order of the thickness of the viscous superlayer, the thickness of the TNTI and the width of the mixing layer from the pre-multiplied power spectra of the autocorrelation functions of the interface curvature, the normal velocity and the interface position, along the TNTI, respectively. In addition, we find that the TNTI characteristics do not show significant dependence on the velocity ratios and
$\unicode[STIX]{x1D702}$ is the Kolmogorov length scale) compares well with the values reported in the literature for other shear flows. Although both the interfaces are found to behave like a fractal with a dimension of 1.3 in two dimensions, one can find dominant length scales of the order of the thickness of the viscous superlayer, the thickness of the TNTI and the width of the mixing layer from the pre-multiplied power spectra of the autocorrelation functions of the interface curvature, the normal velocity and the interface position, along the TNTI, respectively. In addition, we find that the TNTI characteristics do not show significant dependence on the velocity ratios and  $Re_{\unicode[STIX]{x1D706}}$ considered in the present study. Furthermore, the conditional transverse velocity profiles indicate that the entrainment characteristics for the upper and lower TNTIs may be asymmetric in nature.
$Re_{\unicode[STIX]{x1D706}}$ considered in the present study. Furthermore, the conditional transverse velocity profiles indicate that the entrainment characteristics for the upper and lower TNTIs may be asymmetric in nature.
We examine the behaviour of turbulent boundary layers over surfaces composed of spanwise-alternating smooth and rough strips, where the width of the strips  $S$ varies such that
$S$ varies such that  $0.32\leqslant S/\overline{\unicode[STIX]{x1D6FF}}\leqslant 6.81$, where
$0.32\leqslant S/\overline{\unicode[STIX]{x1D6FF}}\leqslant 6.81$, where  $\overline{\unicode[STIX]{x1D6FF}}$ is the boundary-layer thickness averaged over one spanwise wavelength of the heterogeneity. The experiments are configured to examine the influences of spanwise variation in wall shear stress over a large
$\overline{\unicode[STIX]{x1D6FF}}$ is the boundary-layer thickness averaged over one spanwise wavelength of the heterogeneity. The experiments are configured to examine the influences of spanwise variation in wall shear stress over a large  $S/\overline{\unicode[STIX]{x1D6FF}}$ range. Hot-wire anemometry and particle image velocimetry (PIV) reveal that the half-wavelength
$S/\overline{\unicode[STIX]{x1D6FF}}$ range. Hot-wire anemometry and particle image velocimetry (PIV) reveal that the half-wavelength  $S/\overline{\unicode[STIX]{x1D6FF}}$ governs the diameter and strength of the resulting mean secondary flows and hence the observed isovels of the mean streamwise velocity. Three possible cases are observed: limiting cases (either
$S/\overline{\unicode[STIX]{x1D6FF}}$ governs the diameter and strength of the resulting mean secondary flows and hence the observed isovels of the mean streamwise velocity. Three possible cases are observed: limiting cases (either  $S/\overline{\unicode[STIX]{x1D6FF}}\ll 1$ or
$S/\overline{\unicode[STIX]{x1D6FF}}\ll 1$ or  $S/\overline{\unicode[STIX]{x1D6FF}}\gg 1$), where the secondary flows are confined near the wall or near the roughness change, and intermediate cases (
$S/\overline{\unicode[STIX]{x1D6FF}}\gg 1$), where the secondary flows are confined near the wall or near the roughness change, and intermediate cases ( $S/\overline{\unicode[STIX]{x1D6FF}}\approx 1$), where the secondary flows are space filling and at their strongest. These secondary flows, however, exhibit a time-dependent behaviour which might be masked by time averaging. Further analysis of the energy spectrogram and fluctuating flow fields obtained from PIV show that the secondary flows meander in a similar manner to that of large-scale structures occurring naturally in turbulence over smooth walls. The meandering of the secondary flows is a function of
$S/\overline{\unicode[STIX]{x1D6FF}}\approx 1$), where the secondary flows are space filling and at their strongest. These secondary flows, however, exhibit a time-dependent behaviour which might be masked by time averaging. Further analysis of the energy spectrogram and fluctuating flow fields obtained from PIV show that the secondary flows meander in a similar manner to that of large-scale structures occurring naturally in turbulence over smooth walls. The meandering of the secondary flows is a function of  $S/\overline{\unicode[STIX]{x1D6FF}}$ and is most prominent when
$S/\overline{\unicode[STIX]{x1D6FF}}$ and is most prominent when  $S/\overline{\unicode[STIX]{x1D6FF}}\approx 1$.
$S/\overline{\unicode[STIX]{x1D6FF}}\approx 1$.
We experimentally characterize turbulence in boundary layers generated by different levels of nearly isotropic homogeneous turbulence over flat impervious boundaries and over non-cohesive sediment beds with and without ripples. We use randomly actuated synthetic jet arrays (RASJA – Variano & Cowen, J. Fluid Mech., vol. 604, 2008, pp. 1–32) to generate high Reynolds number ( $Re_{\unicode[STIX]{x1D706}}\sim 300$) turbulence with negligible secondary mean flows or mean bed shear. The isotropic region and the boundary layer connecting this isotropic region to the bed are investigated using particle image velocimetry measurements. Surprisingly, we observe the development of ripples on the sediment bed (
$Re_{\unicode[STIX]{x1D706}}\sim 300$) turbulence with negligible secondary mean flows or mean bed shear. The isotropic region and the boundary layer connecting this isotropic region to the bed are investigated using particle image velocimetry measurements. Surprisingly, we observe the development of ripples on the sediment bed ( $D_{50}=260~\unicode[STIX]{x03BC}\text{m}$). We draw comparisons between the mean shear free turbulent boundary layer formed above a flat stationary solid boundary (Johnson & Cowen, J. Fluid Mech., vol. 835, 2018, pp. 217–251) and its sediment counterpart by considering statistical metrics including root mean square velocity fluctuations, turbulent kinetic energy, dissipation rates, production, integral scales, Reynolds stresses and spatial spectra. Using an 8 × 8 RASJA, we find the damping of turbulence and dissipation rates at flat and rippled sediment beds with low levels of suspended sediments relative to an impermeable glass bed, whereas with a 16 × 16 RASJA we find the enhancement of turbulence and dissipation rates of a resuspending sediment bed relative to an impermeable glass bed. We hypothesize that this may be a result of a change in direction of the bed-normal mean flows at the porous boundary. We explore a relationship between the integral length scale of the turbulence with the resulting sediment ripple spacing by varying the mean on-time of the RASJA algorithm.
$D_{50}=260~\unicode[STIX]{x03BC}\text{m}$). We draw comparisons between the mean shear free turbulent boundary layer formed above a flat stationary solid boundary (Johnson & Cowen, J. Fluid Mech., vol. 835, 2018, pp. 217–251) and its sediment counterpart by considering statistical metrics including root mean square velocity fluctuations, turbulent kinetic energy, dissipation rates, production, integral scales, Reynolds stresses and spatial spectra. Using an 8 × 8 RASJA, we find the damping of turbulence and dissipation rates at flat and rippled sediment beds with low levels of suspended sediments relative to an impermeable glass bed, whereas with a 16 × 16 RASJA we find the enhancement of turbulence and dissipation rates of a resuspending sediment bed relative to an impermeable glass bed. We hypothesize that this may be a result of a change in direction of the bed-normal mean flows at the porous boundary. We explore a relationship between the integral length scale of the turbulence with the resulting sediment ripple spacing by varying the mean on-time of the RASJA algorithm.
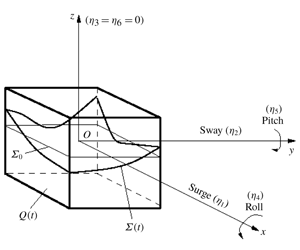
Assuming an inviscid incompressible liquid (with irrotational flows) partly filling a square base tank, which performs a small-amplitude sway/surge/pitch/roll periodic motion whose frequency is close to the lowest natural sloshing frequency, a nine-dimensional Narimanov–Moiseev-type (modal) system of ordinary differential equations with respect to the hydrodynamic generalised coordinates was derived in the Part 1 (Faltinsen et al., J. Fluid Mech., vol. 487, 2003, pp. 1–42). Constructing and analysing asymptotic periodic solutions of the system made it possible to classify steady-state resonant sloshing and its stability for the harmonic reciprocating (longitudinal, diagonal and oblique) forcing. The results were supported by experimental observations and measurements. The present paper finalises the case studies by considering the three-dimensional non-parametric (combined sway, pitch, surge, roll and yaw, but no heave) cyclic tank motions. It becomes possible after establishing an asymptotic equivalence of the associated periodic solutions of the modal system to those for a suitable horizontal translatory elliptic forcing so that, as a consequence, resonant steady-state waves and their stability can be considered versus angular position, semi-axis ratio  $|\unicode[STIX]{x1D6FF}_{1}|$ and direction (counter- or clockwise) of the equivalent orbits. The circular orbit causes stable swirling waves (co-directed with the orbit) but may also excite stable nearly standing waves. The orbit direction does not affect the response curves for wall-symmetric (canonic) and diagonal orbit positions. This is not true for the oblique-type elliptic forcing. When the semi-axis ratio
$|\unicode[STIX]{x1D6FF}_{1}|$ and direction (counter- or clockwise) of the equivalent orbits. The circular orbit causes stable swirling waves (co-directed with the orbit) but may also excite stable nearly standing waves. The orbit direction does not affect the response curves for wall-symmetric (canonic) and diagonal orbit positions. This is not true for the oblique-type elliptic forcing. When the semi-axis ratio  $|\unicode[STIX]{x1D6FF}_{1}|$ changes from 0 to 1, the response curves exhibit astonishing metamorphoses significantly influencing the frequency ranges of stable nearly standing/swirling waves and ‘irregular’ sloshing. For the experimental input data by Ikeda et al. (J. Fluid Mech., vol. 700, 2012, pp. 304–328), the counter-directed swirling disappears as
$|\unicode[STIX]{x1D6FF}_{1}|$ changes from 0 to 1, the response curves exhibit astonishing metamorphoses significantly influencing the frequency ranges of stable nearly standing/swirling waves and ‘irregular’ sloshing. For the experimental input data by Ikeda et al. (J. Fluid Mech., vol. 700, 2012, pp. 304–328), the counter-directed swirling disappears as  $0.5\lesssim |\unicode[STIX]{x1D6FF}_{1}|$ but the frequency range of irregular waves vanishes for
$0.5\lesssim |\unicode[STIX]{x1D6FF}_{1}|$ but the frequency range of irregular waves vanishes for  $0.75\lesssim |\unicode[STIX]{x1D6FF}_{1}|$.
$0.75\lesssim |\unicode[STIX]{x1D6FF}_{1}|$.
We examine the critical viscous mode of the Taylor–Couette strato-rotational instability, concentrating on cases where the buoyancy frequency  $N$ and the inner cylinder rotation rate
$N$ and the inner cylinder rotation rate  $\unicode[STIX]{x1D6FA}_{in}$ are comparable, giving a detailed account for
$\unicode[STIX]{x1D6FA}_{in}$ are comparable, giving a detailed account for  $N=\unicode[STIX]{x1D6FA}_{in}$. The ratio of the outer to the inner cylinder rotation rates
$N=\unicode[STIX]{x1D6FA}_{in}$. The ratio of the outer to the inner cylinder rotation rates  $\unicode[STIX]{x1D707}=\unicode[STIX]{x1D6FA}_{out}/\unicode[STIX]{x1D6FA}_{in}$ and the ratio of the inner to the outer cylinder radius
$\unicode[STIX]{x1D707}=\unicode[STIX]{x1D6FA}_{out}/\unicode[STIX]{x1D6FA}_{in}$ and the ratio of the inner to the outer cylinder radius  $\unicode[STIX]{x1D702}=r_{in}/r_{out}$ satisfy
$\unicode[STIX]{x1D702}=r_{in}/r_{out}$ satisfy  $0<\unicode[STIX]{x1D707}<1$ and
$0<\unicode[STIX]{x1D707}<1$ and  $0<\unicode[STIX]{x1D702}<1$. We find considerable variation in the structure of the mode, and the critical Reynolds number
$0<\unicode[STIX]{x1D702}<1$. We find considerable variation in the structure of the mode, and the critical Reynolds number  $Re_{c}$ at which the flow becomes unstable. For
$Re_{c}$ at which the flow becomes unstable. For  $N=\unicode[STIX]{x1D6FA}_{in}$, we classify different regions of the
$N=\unicode[STIX]{x1D6FA}_{in}$, we classify different regions of the  $\unicode[STIX]{x1D702}\unicode[STIX]{x1D707}$-plane by the critical viscous mode of each region. We find that there is a triple point in the
$\unicode[STIX]{x1D702}\unicode[STIX]{x1D707}$-plane by the critical viscous mode of each region. We find that there is a triple point in the  $\unicode[STIX]{x1D702}\unicode[STIX]{x1D707}$-plane where three different viscous modes all onset at the same Reynolds number. We also find a discontinuous change in
$\unicode[STIX]{x1D702}\unicode[STIX]{x1D707}$-plane where three different viscous modes all onset at the same Reynolds number. We also find a discontinuous change in  $Re_{c}$ along a curve in the
$Re_{c}$ along a curve in the  $\unicode[STIX]{x1D702}\unicode[STIX]{x1D707}$-plane, on one side of which exist closed unstable domains where the flow can restabilise when the Reynolds number is increased. A new form of viscous instability occurring for wide gaps has been detected. We show for the first time that there is a region of the parameter space for which the critical viscous mode at the onset of instability corresponds to the inviscid radiative instability of Le Dizès & Riedinger (J. Fluid Mech., vol. 660, 2010, pp. 147–161). Focusing on small-to-moderate wavenumbers, we demonstrate that the viscous and inviscid systems are not always correlated. We explore which viscous modes relate to inviscid modes and which do not. For asymptotically large vertical wavenumbers, we have extended the inviscid analysis of Park & Billant (J. Fluid Mech., vol. 725, 2013, pp. 262–280) to cover the cases where
$\unicode[STIX]{x1D702}\unicode[STIX]{x1D707}$-plane, on one side of which exist closed unstable domains where the flow can restabilise when the Reynolds number is increased. A new form of viscous instability occurring for wide gaps has been detected. We show for the first time that there is a region of the parameter space for which the critical viscous mode at the onset of instability corresponds to the inviscid radiative instability of Le Dizès & Riedinger (J. Fluid Mech., vol. 660, 2010, pp. 147–161). Focusing on small-to-moderate wavenumbers, we demonstrate that the viscous and inviscid systems are not always correlated. We explore which viscous modes relate to inviscid modes and which do not. For asymptotically large vertical wavenumbers, we have extended the inviscid analysis of Park & Billant (J. Fluid Mech., vol. 725, 2013, pp. 262–280) to cover the cases where  $N$ and
$N$ and  $\unicode[STIX]{x1D6FA}_{in}$ are comparable.
$\unicode[STIX]{x1D6FA}_{in}$ are comparable.
A combination of passive and active methods is used to manipulate the symmetry of the turbulent wake of an Ahmed body. Dedicated experiments to study the wake reversals occurring between symmetry-breaking states are performed. We show how transient symmetric states explored during the reversals differ from static symmetry-breaking states in the flow organization they induce. In asymmetric states, a strong interaction and coupling between the recirculating flow from one side and the shear layer from opposite side triggers shear-layer instabilities and their amplification. The resulting large-scale flow engulfment in the recirculation region increases the recirculation intensity and thus increases base drag. By contrast, during the wake reversals the disorganization of the recirculating flow leads to a transient symmetric state with prevented shear-layer interaction and triggering mechanism with a concomitant drag reduction of  ${\sim}8\,\%$ compared to symmetry-breaking states. Finally, recent experimental results for unbalanced wakes and methodologies addressing the control of wake asymmetries for drag reduction are discussed and interpreted based on the present findings. This leads us to provide new insights in control methods for wake asymmetries.
${\sim}8\,\%$ compared to symmetry-breaking states. Finally, recent experimental results for unbalanced wakes and methodologies addressing the control of wake asymmetries for drag reduction are discussed and interpreted based on the present findings. This leads us to provide new insights in control methods for wake asymmetries.