
Contents
Research Article
Design and motion control of an under-actuated snake arm maintainer
-
- Published online by Cambridge University Press:
- 29 September 2021, pp. 1763-1782
-
- Article
- Export citation
Effective workspaces of parallel robots
-
- Published online by Cambridge University Press:
- 27 June 2022, pp. 4308-4325
-
- Article
- Export citation
A model-free deep reinforcement learning approach for control of exoskeleton gait patterns
-
- Published online by Cambridge University Press:
- 15 December 2021, pp. 2189-2214
-
- Article
- Export citation
Article
Development of a mechanical decoupling surgical scissors for robot-assisted minimally invasive surgery
-
- Published online by Cambridge University Press:
- 31 May 2021, pp. 316-328
-
- Article
- Export citation
Communication-free autonomous cooperative circumnavigation of unpredictable dynamic objects
-
- Published online by Cambridge University Press:
- 09 June 2021, pp. 520-543
-
- Article
- Export citation
Research Article
Constraint characteristics and type synthesis of two families of 1T2R parallel mechanism
-
- Published online by Cambridge University Press:
- 31 January 2022, pp. 3033-3056
-
- Article
- Export citation
Learn multi-step object sorting tasks through deep reinforcement learning
-
- Published online by Cambridge University Press:
- 06 May 2022, pp. 3878-3894
-
- Article
- Export citation
Article
A novel methodology to explore the periodic gait of a biped walker under uncertainty using a machine learning algorithm
-
- Published online by Cambridge University Press:
- 28 May 2021, pp. 120-135
-
- Article
- Export citation
Research Article
Improving the performance of parallel robots by applying distinct hybrid control techniques
-
- Published online by Cambridge University Press:
- 27 July 2021, pp. 951-975
-
- Article
- Export citation
Configuration design and experimental verification of a variable constant-force compliant mechanism
-
- Published online by Cambridge University Press:
- 16 May 2022, pp. 3463-3475
-
- Article
-
- You have access
- HTML
- Export citation
A herringbone soft pneu-net actuator for enhanced conformal gripping
-
- Published online by Cambridge University Press:
- 02 September 2021, pp. 1345-1360
-
- Article
- Export citation
Gramian-constrained optimization process for the stiffness model identification of industrial manipulators
-
- Published online by Cambridge University Press:
- 23 December 2021, pp. 2592-2609
-
- Article
- Export citation
Article
ADD-RRV for motion planning in complex environments
-
- Published online by Cambridge University Press:
- 14 May 2021, pp. 136-153
-
- Article
- Export citation
Research Article
Feedforward combined multi-axis cross-coupling contour control compensation strategy of optical mirror processing robot
-
- Published online by Cambridge University Press:
- 25 March 2022, pp. 3476-3498
-
- Article
- Export citation
Dynamic path planning over CG-Space of 10DOF Rover with static and randomly moving obstacles using RRT* rewiring
-
- Published online by Cambridge University Press:
- 07 January 2022, pp. 2610-2629
-
- Article
- Export citation
Dynamic logarithmic state and control quantization for continuous-time linear systems
-
- Published online by Cambridge University Press:
- 07 January 2022, pp. 2215-2230
-
- Article
- Export citation
Development of modularized in-pipe inspection robotic system: MRINSPECT VII+
-
- Published online by Cambridge University Press:
- 03 September 2021, pp. 1361-1384
-
- Article
- Export citation
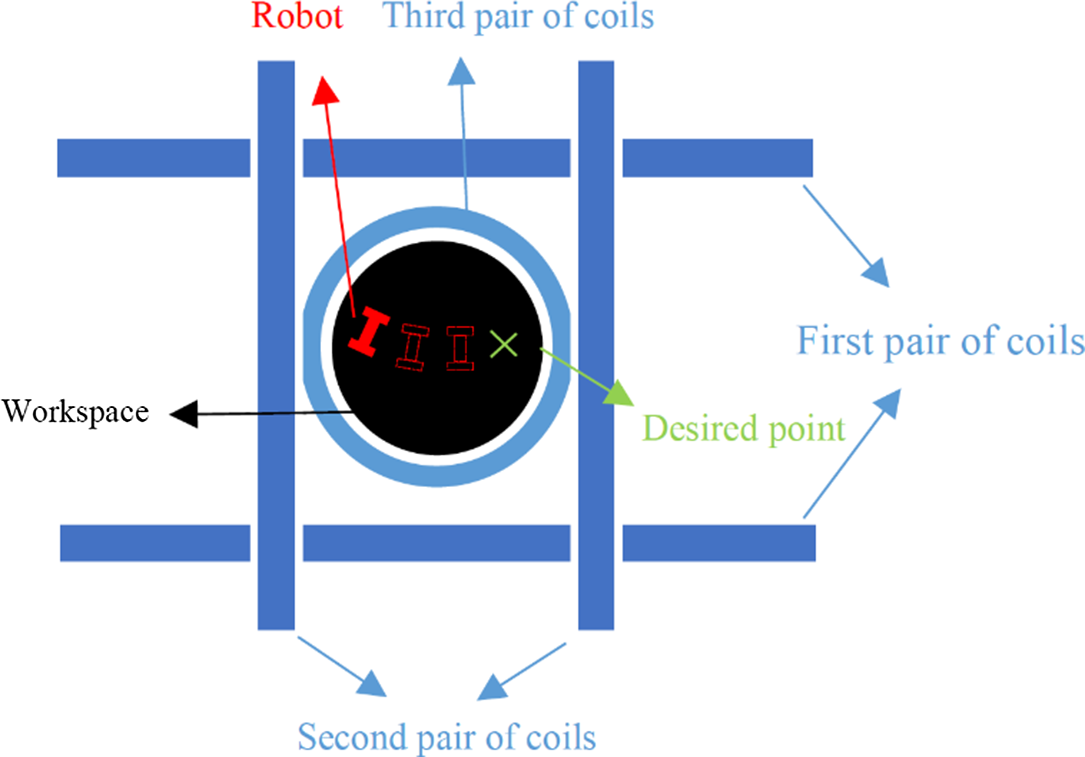
Position control of a wheel-based miniature magnetic robot using neuro-fuzzy network
-
- Published online by Cambridge University Press:
- 20 May 2022, pp. 3895-3910
-
- Article
- Export citation
Emission source tracing based on bionic algorithm mobile sensors with artificial olfactory system
-
- Published online by Cambridge University Press:
- 27 July 2021, pp. 976-996
-
- Article
- Export citation
Kinematic analysis of overconstrained manipulators with partial subspaces using decomposition method
-
- Published online by Cambridge University Press:
- 30 September 2021, pp. 1783-1798
-
- Article
- Export citation