

doi:10.1017/jfm.2024.514 Kumar & Premachandran Flow film boiling on a sphere in the mixed and forced convection regimes
Contents
JFM Rapids

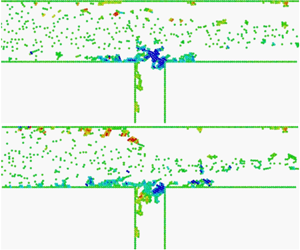
High-flexibility reconstruction of small-scale motions in wall turbulence using a generalized zero-shot learning
-
- Published online by Cambridge University Press:
- 14 August 2024, R1
-
- Article
- Export citation
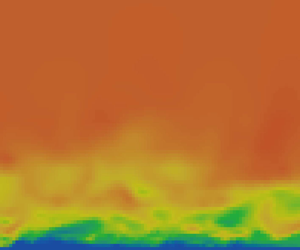
Fake turbulence
-
- Published online by Cambridge University Press:
- 12 August 2024, R2
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

On a similarity solution for lock-release gravity currents affected by slope, drag and entrainment
-
- Published online by Cambridge University Press:
- 13 August 2024, R3
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
We consider the long-time propagation of a Boussinesq inertia–buoyancy (large-Reynolds- number) gravity current released from a lock over a downslope of angle
 $\gamma$, affected by entrainment and drag. We show that the shallow-water (depth-averaged) equations with a Benjamin-type front-jump condition admit a similarity solution
$\gamma$, affected by entrainment and drag. We show that the shallow-water (depth-averaged) equations with a Benjamin-type front-jump condition admit a similarity solution  $x_N(t) = K t^{2/3}$ while
$x_N(t) = K t^{2/3}$ while  $h, \phi, u$ change like
$h, \phi, u$ change like  $t$ to the power of
$t$ to the power of  $2/3, -4/3, -1/3$, respectively; here
$2/3, -4/3, -1/3$, respectively; here  $x_N, h, \phi, u$ and
$x_N, h, \phi, u$ and  $t$ are the position of the nose (distance from backwall), thickness, concentration of dense fluid, velocity and time, respectively, and K is a constant. Assuming that
$t$ are the position of the nose (distance from backwall), thickness, concentration of dense fluid, velocity and time, respectively, and K is a constant. Assuming that  $\gamma$ and the coefficients of entrainment and drag are constant, we derive an analytical exact solution for the similarity profiles and show that
$\gamma$ and the coefficients of entrainment and drag are constant, we derive an analytical exact solution for the similarity profiles and show that  $K \propto (\tan \gamma )^{1/3}$; the driving of the slope is balanced by entrainment and/or drag. The predicted
$K \propto (\tan \gamma )^{1/3}$; the driving of the slope is balanced by entrainment and/or drag. The predicted  $t^{2/3}$ propagation is in agreement with previously published experimental data but a conclusive quantitative assessment of the present theory cannot be performed due to various uncertainties (discussed in the paper) that must be resolved by future work.
$t^{2/3}$ propagation is in agreement with previously published experimental data but a conclusive quantitative assessment of the present theory cannot be performed due to various uncertainties (discussed in the paper) that must be resolved by future work.










Focus on Fluids

It takes three to tangle
-
- Published online by Cambridge University Press:
- 12 August 2024, F1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
JFM Papers
Generalizing electroosmotic-flow predictions over charge-modulated periodic topographies: tuneable far-field effects
-
- Published online by Cambridge University Press:
- 12 August 2024, A1
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Turbulence modulation by charged inertial particles in channel flow
-
- Published online by Cambridge University Press:
- 12 August 2024, A2
-
- Article
- Export citation
Lagrangian-based simulation method using constrained Stokesian dynamics for particulate flows in microchannel
-
- Published online by Cambridge University Press:
- 12 August 2024, A3
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
The impact of non-frozen turbulence on the modelling of the noise from serrated trailing edges
-
- Published online by Cambridge University Press:
- 12 August 2024, A4
-
- Article
- Export citation

Transport of inertial spherical particles in compressible turbulent boundary layers
-
- Published online by Cambridge University Press:
- 12 August 2024, A5
-
- Article
- Export citation
-
In the present study, we perform direct numerical simulations of compressible turbulent boundary layers at free stream Mach numbers
 $2\unicode{x2013}6$ laden with dilute phase of spherical particles to investigate the Mach number effects on particle transport and dynamics. Most of the phenomena observed and well-recognized for inertia particles in incompressible wall-bounded turbulent flows – such as near-wall preferential accumulation and clustering beneath low-speed streaks, flatter mean velocity profiles, and trend variation of the particle velocity fluctuations – are identified in the compressible turbulent boundary layer as well. However, we find that the compressibility effects are significant for large inertia particles. As the Mach number increases, the near-wall accumulation and the small-scale clustering are alleviated, which is probably caused by the variations of the fluid density and viscosity that are crucial to particle dynamics. This can be affected by the fact that the forces acting on the particles with viscous Stokes number greater than 500 are modulated by the comparatively high particle Mach numbers in the near-wall region. This is also the reason for the abatement of the streamwise particle velocity fluctuation intensities with the Mach numbers.
$2\unicode{x2013}6$ laden with dilute phase of spherical particles to investigate the Mach number effects on particle transport and dynamics. Most of the phenomena observed and well-recognized for inertia particles in incompressible wall-bounded turbulent flows – such as near-wall preferential accumulation and clustering beneath low-speed streaks, flatter mean velocity profiles, and trend variation of the particle velocity fluctuations – are identified in the compressible turbulent boundary layer as well. However, we find that the compressibility effects are significant for large inertia particles. As the Mach number increases, the near-wall accumulation and the small-scale clustering are alleviated, which is probably caused by the variations of the fluid density and viscosity that are crucial to particle dynamics. This can be affected by the fact that the forces acting on the particles with viscous Stokes number greater than 500 are modulated by the comparatively high particle Mach numbers in the near-wall region. This is also the reason for the abatement of the streamwise particle velocity fluctuation intensities with the Mach numbers.


Pore-scale study of CO2 desublimation and sublimation in a packed bed during cryogenic carbon capture
-
- Published online by Cambridge University Press:
- 12 August 2024, A6
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Cryogenic carbon capture (CCC) is an innovative technology to desublimate
 $\text {CO}_2$ out of industrial flue gases. A comprehensive understanding of
$\text {CO}_2$ out of industrial flue gases. A comprehensive understanding of  $\text {CO}_2$ desublimation and sublimation is essential for widespread application of CCC, which is highly challenging due to the complex physics behind. In this work, a lattice Boltzmann (LB) model is proposed to study
$\text {CO}_2$ desublimation and sublimation is essential for widespread application of CCC, which is highly challenging due to the complex physics behind. In this work, a lattice Boltzmann (LB) model is proposed to study  $\text {CO}_2$ desublimation and sublimation for different operating conditions, including the bed temperature (subcooling degree
$\text {CO}_2$ desublimation and sublimation for different operating conditions, including the bed temperature (subcooling degree  $\Delta T_s$), gas feed rate (Péclet number
$\Delta T_s$), gas feed rate (Péclet number  $Pe $) and bed porosity (
$Pe $) and bed porosity ( $\psi$). The
$\psi$). The  $\text {CO}_2$ desublimation and sublimation properties are reproduced. Interactions between convective
$\text {CO}_2$ desublimation and sublimation properties are reproduced. Interactions between convective  $\text {CO}_2$ supply and desublimation/sublimation intensity are analysed. In the single-grain case,
$\text {CO}_2$ supply and desublimation/sublimation intensity are analysed. In the single-grain case,  $Pe $ is suggested to exceed a critical value
$Pe $ is suggested to exceed a critical value  $Pe _c$ at each
$Pe _c$ at each  $\Delta T_s$ to avoid the convection-limited regime. Beyond
$\Delta T_s$ to avoid the convection-limited regime. Beyond  $Pe _c$, the
$Pe _c$, the  $\text {CO}_2$ capture rate (
$\text {CO}_2$ capture rate ( $v_c$) grows monotonically with
$v_c$) grows monotonically with  $\Delta T_s$, indicating a desublimation-limited regime. In the packed bed case, multiple grains render the convective
$\Delta T_s$, indicating a desublimation-limited regime. In the packed bed case, multiple grains render the convective  $\text {CO}_2$ supply insufficient and make CCC operate under the convection-limited mechanism. Besides, in small-
$\text {CO}_2$ supply insufficient and make CCC operate under the convection-limited mechanism. Besides, in small- $\Delta T_s$ and high-
$\Delta T_s$ and high- $Pe $ tests,
$Pe $ tests,  $\text {CO}_2$ desublimation becomes insufficient compared with convective
$\text {CO}_2$ desublimation becomes insufficient compared with convective  $\text {CO}_2$ supply, thus introducing the desublimation-limited regime with severe
$\text {CO}_2$ supply, thus introducing the desublimation-limited regime with severe  $\text {CO}_2$ capture capacity loss (
$\text {CO}_2$ capture capacity loss ( $\eta _d$). Moreover, large
$\eta _d$). Moreover, large  $\psi$ enhances gas mobility while decreasing cold grain volume. A moderate porosity
$\psi$ enhances gas mobility while decreasing cold grain volume. A moderate porosity  $\psi _c$ is recommended for improving the
$\psi _c$ is recommended for improving the  $\text {CO}_2$ capture performance. By analysing
$\text {CO}_2$ capture performance. By analysing  $v_c$ and
$v_c$ and  $\eta _d$, regime diagrams are proposed in
$\eta _d$, regime diagrams are proposed in  $\Delta T_s$–
$\Delta T_s$– $Pe $ space to show distributions of convection-limited and desublimation-limited regimes, thus suggesting optimal conditions for efficient
$Pe $ space to show distributions of convection-limited and desublimation-limited regimes, thus suggesting optimal conditions for efficient  $\text {CO}_2$ capture. This work develops a viable LB model to examine CCC under extensive operating conditions, contributing to facilitating its application.
$\text {CO}_2$ capture. This work develops a viable LB model to examine CCC under extensive operating conditions, contributing to facilitating its application.






























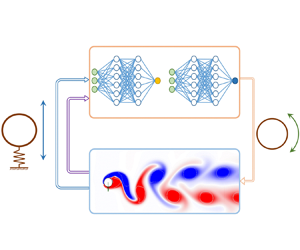
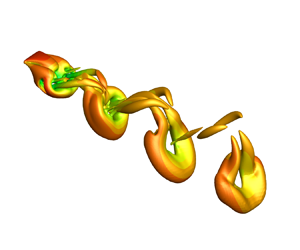
Deep reinforcement learning finds a new strategy for vortex-induced vibration control
-
- Published online by Cambridge University Press:
- 12 August 2024, A7
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
As a promising machine learning method for active flow control (AFC), deep reinforcement learning (DRL) has been successfully applied in various scenarios, such as the drag reduction for stationary cylinders under both laminar and weakly turbulent conditions. However, current applications of DRL in AFC still suffer from drawbacks including excessive sensor usage, unclear search paths and insufficient robustness tests. In this study, we aim to tackle these issues by applying DRL-guided self-rotation to suppress the vortex-induced vibration (VIV) of a circular cylinder under the lock-in condition. With a state space consisting only of the acceleration, velocity and displacement of the cylinder, the DRL agent learns an effective control strategy that successfully suppresses the VIV amplitude by
 $99.6\,\%$. Through systematic comparisons between different combinations of sensory-motor cues as well as sensitivity analysis, we identify three distinct stages of the search path related to the flow physics, in which the DRL agent adjusts the amplitude, frequency and phase lag of the actions. Under the deterministic control, only a little forcing is required to maintain the control performance, and the VIV frequency is only slightly affected, showing that the present control strategy is distinct from those utilizing the lock-on effect. Through dynamic mode decomposition analysis, we observe that the growth rates of the dominant modes in the controlled case all become negative, indicating that DRL remarkably enhances the system stability. Furthermore, tests involving various Reynolds numbers and upstream perturbations confirm that the learned control strategy is robust. Finally, the present study shows that DRL is capable of controlling VIV with a very small number of sensors, making it effective, efficient, interpretable and robust. We anticipate that DRL could provide a general framework for AFC and a deeper understanding of the underlying physics.
$99.6\,\%$. Through systematic comparisons between different combinations of sensory-motor cues as well as sensitivity analysis, we identify three distinct stages of the search path related to the flow physics, in which the DRL agent adjusts the amplitude, frequency and phase lag of the actions. Under the deterministic control, only a little forcing is required to maintain the control performance, and the VIV frequency is only slightly affected, showing that the present control strategy is distinct from those utilizing the lock-on effect. Through dynamic mode decomposition analysis, we observe that the growth rates of the dominant modes in the controlled case all become negative, indicating that DRL remarkably enhances the system stability. Furthermore, tests involving various Reynolds numbers and upstream perturbations confirm that the learned control strategy is robust. Finally, the present study shows that DRL is capable of controlling VIV with a very small number of sensors, making it effective, efficient, interpretable and robust. We anticipate that DRL could provide a general framework for AFC and a deeper understanding of the underlying physics.


Thermodynamically consistent diffuse-interface mixture models of incompressible multicomponent fluids
-
- Published online by Cambridge University Press:
- 12 August 2024, A8
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Perfect active absorption of water waves in a channel by a dipole source
-
- Published online by Cambridge University Press:
- 12 August 2024, A9
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Dynamics of particle aggregation in dewetting films of complex liquids
-
- Published online by Cambridge University Press:
- 12 August 2024, A10
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Dynamics of weighted flexible ribbons in a uniform flow
-
- Published online by Cambridge University Press:
- 14 August 2024, A11
-
- Article
- Export citation
-
This study explores the dynamics of flexible ribbons with an added weight
 $G$ at the tail in uniform flow, considering key parameters like inflow Reynolds number (
$G$ at the tail in uniform flow, considering key parameters like inflow Reynolds number ( $Re_u$), mass ratio (
$Re_u$), mass ratio ( $M_t$) and aspect ratio (
$M_t$) and aspect ratio ( ${A{\kern-4pt}R}$). For two-dimensional ribbons, a simplified theoretical model accurately predicts equilibrium configurations and forces. Inspired by Barois & De Langre (J. Fluid Mech., vol. 735, 2013, R2), we introduce an important control parameter (
${A{\kern-4pt}R}$). For two-dimensional ribbons, a simplified theoretical model accurately predicts equilibrium configurations and forces. Inspired by Barois & De Langre (J. Fluid Mech., vol. 735, 2013, R2), we introduce an important control parameter ( $C_G$) that effectively collapses normalized forces and angle data. Vortex-induced vibration is observed, and Strouhal number (
$C_G$) that effectively collapses normalized forces and angle data. Vortex-induced vibration is observed, and Strouhal number ( $St$) scaling laws with
$St$) scaling laws with  $C_G$ are identified. In three-dimensional scenarios, the model effectively predicts lift, but its accuracy in predicting drag is limited to situations with small
$C_G$ are identified. In three-dimensional scenarios, the model effectively predicts lift, but its accuracy in predicting drag is limited to situations with small  $Re_u$ values. The flow along the side edges mitigates pressure differences, thereby suppressing vibration and uplift, particularly noticeable in the case of narrow ribbons. This study offers new insights into the dynamics of flexible bodies in uniform flow.
$Re_u$ values. The flow along the side edges mitigates pressure differences, thereby suppressing vibration and uplift, particularly noticeable in the case of narrow ribbons. This study offers new insights into the dynamics of flexible bodies in uniform flow.








Resonant standing surface waves excited by an oscillating cylinder in a narrow rectangular cavity
-
- Published online by Cambridge University Press:
- 14 August 2024, A12
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Inertial particle focusing in fluid flow through spiral ducts: dynamics, tipping phenomena and particle separation
-
- Published online by Cambridge University Press:
- 14 August 2024, A13
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
Shear-induced depinning of thin droplets on rough substrates
-
- Published online by Cambridge University Press:
- 14 August 2024, A14
-
- Article
-
- You have access
- Open access
- HTML
- Export citation

Experimental study on the settling motion of coral grains in still water
-
- Published online by Cambridge University Press:
- 14 August 2024, A15
-
- Article
-
- You have access
- Open access
- HTML
- Export citation
-
Understanding settling motion of coral grains is important in terms of protection of coral reef systems and resotoration of the associated ecosystems. In this paper, a series of laboratory experiments was conducted to investigate the settling motion, using optical microscopy to measure shape parameters of coral grains and the particle-filtering-based object tracking to reconstruct the three-dimensional trajectory. Three characteristic descent regimes, namely, tumbling, chaotic and fluttering, are classified based on the three-dimensional trajectory, the spiral radius variation and the velocity spectrum. It is demonstrated that if one randomly picks up one coral grain, then the probabilities of occurrence of the three regimes are approximately
 $26\,\%$,
$26\,\%$,  $42\,\%$ and
$42\,\%$ and  $32\,\%$, respectively. We have shown that first, the dimensionless settling velocity generally increases with the non-dimensional diameter and Corey shape factor and second, the drag coefficient generally decreases with the Reynolds number and Corey shape factor. Based on this, the applicability of existing models on predicting settling velocity and drag coefficient for coral grains is demonstrated further. Finally, we have proposed extended models for predicting the settling velocity. This study contributes to better understanding of settling motion and improves our predictive capacity of settling velocity for coral grains with complex geometry.
$32\,\%$, respectively. We have shown that first, the dimensionless settling velocity generally increases with the non-dimensional diameter and Corey shape factor and second, the drag coefficient generally decreases with the Reynolds number and Corey shape factor. Based on this, the applicability of existing models on predicting settling velocity and drag coefficient for coral grains is demonstrated further. Finally, we have proposed extended models for predicting the settling velocity. This study contributes to better understanding of settling motion and improves our predictive capacity of settling velocity for coral grains with complex geometry.



Cracking of submerged beds
-
- Published online by Cambridge University Press:
- 14 August 2024, A16
-
- Article
- Export citation