










1. Introduction
Jet flows are ubiquitous in nature and technology and belong to a handful of configurations described in any fluid mechanics textbook. Jet mixing plays a pivotal role in many engineering applications, e.g. fuel injection in engines, combustor cooling, chemical mixing, printing and noise generation (Jordan & Colonius Reference Jordan and Colonius2013), just to name a few. Hence, jet mixing optimization plays an important part in academic research and engineering applications.
Laminar jets are affected by the Kelvin–Helmholtz instability of the initial shear layer (Ball, Fellouah & Pollard Reference Ball, Fellouah and Pollard2012). The jet shear layer rolls up into pronounced vortex rings. Excitation at the nozzle exit provides authority over the vortex formation, e.g. allowing for the speed up of the vortex formation, to promote or mitigate vortex pairing, and to influence the far-field coherent structures. Vortex pairing in the streamwise direction promotes larger mixing regions observed as orderly ‘vortical puffs’ with axisymmetric excitation (Crow & Champagne Reference Crow and Champagne1971). More importantly, a significant increase in the spreading angle can be obtained by vortex splitting evolving along several branches (Lee & Reynolds Reference Lee and Reynolds1985).
The actuation may promote axisymmetric, helical, dual-mode, flapping and bifurcating dynamics. In particular, acoustic excitation of the bulk affects the jet spreading via controlled vortex pairing (Crow & Champagne Reference Crow and Champagne1971; Hussain & Zaman Reference Hussain and Zaman1980). Jet mixing is more effectively augmented with helical forcing (Mankbadi & Liu Reference Mankbadi and Liu1981; Corke & Kusek Reference Corke and Kusek1993). Bifurcating, trifurcating and blooming jets appear with a spreading angle up to  $80^\circ$ when axisymmetric and helical modes are combined (dual mode) with different frequency ratios (Lee & Reynolds Reference Lee and Reynolds1985). The flapping mode is composed of counter-rotating helical modes, and the combination of axisymmetric and flapping modes is referred to as the bifurcating mode. Both the flapping and the bifurcating modes can produce bifurcating jets with impressive jet spreading (Parekh Reference Parekh1989; Danaila & Boersma Reference Danaila and Boersma2000; da Silva & Métais Reference da Silva and Métais2002).
$80^\circ$ when axisymmetric and helical modes are combined (dual mode) with different frequency ratios (Lee & Reynolds Reference Lee and Reynolds1985). The flapping mode is composed of counter-rotating helical modes, and the combination of axisymmetric and flapping modes is referred to as the bifurcating mode. Both the flapping and the bifurcating modes can produce bifurcating jets with impressive jet spreading (Parekh Reference Parekh1989; Danaila & Boersma Reference Danaila and Boersma2000; da Silva & Métais Reference da Silva and Métais2002).
The world of multiple-mode actuation for mixing optimization holds considerable promise and is still to be explored. The radial excitation with three flapping modes, including  $9$ parameters, is optimized by evolution strategies (Koumoutsakos, Freund & Parekh Reference Koumoutsakos, Freund and Parekh2001). Only one dominant flapping mode remains after
$9$ parameters, is optimized by evolution strategies (Koumoutsakos, Freund & Parekh Reference Koumoutsakos, Freund and Parekh2001). Only one dominant flapping mode remains after  $400$ direct numerical simulations at
$400$ direct numerical simulations at  $Re=500$. In the sequel, the bifurcating mode using axial forcing is optimized for
$Re=500$. In the sequel, the bifurcating mode using axial forcing is optimized for  $Re$ up to
$Re$ up to  $1500$ using the amplitudes and two Strouhal numbers as control parameters (Hilgers & Boersma Reference Hilgers and Boersma2001). In an adjoint-based optimization study at
$1500$ using the amplitudes and two Strouhal numbers as control parameters (Hilgers & Boersma Reference Hilgers and Boersma2001). In an adjoint-based optimization study at  $Re=2000$, radial forcing is found to be more effective than axial actuation in dual-mode forcing (Shaabani-Ardali, Sipp & Lesshafft Reference Shaabani-Ardali, Sipp and Lesshafft2020). In an experiment at
$Re=2000$, radial forcing is found to be more effective than axial actuation in dual-mode forcing (Shaabani-Ardali, Sipp & Lesshafft Reference Shaabani-Ardali, Sipp and Lesshafft2020). In an experiment at  $Re=8000$, jet mixing is manipulated with periodic operation of six radial minijets. In 200 evaluations, Bayesian optimization minimizes a streamwise centreline velocity when tuning 12 parameters, the frequency, amplitudes and phase differences (Blanchard et al. Reference Blanchard, Cornejo Maceda, Fan, Li, Zhou, Noack and Sapsis2021). The optimal mixing is facilitated by combining flapping and helical forcing, like machine learning control for the same configuration (Zhou et al. Reference Zhou, Fan, Zhang, Li and Noack2020). Moreover, the control performance also benefits from the deployment of more actuators and a richer actuation space. For example, an intelligent nozzle with eighteen electromagnetic flap actuators (Suzuki, Kasagi & Suzuki Reference Suzuki, Kasagi and Suzuki1999) and 8-channel localized arc filament plasma actuators (Utkin et al. Reference Utkin, Keshav, Kim, Kastner, Adamovich and Samimy2006) have been developed for jet control.
$Re=8000$, jet mixing is manipulated with periodic operation of six radial minijets. In 200 evaluations, Bayesian optimization minimizes a streamwise centreline velocity when tuning 12 parameters, the frequency, amplitudes and phase differences (Blanchard et al. Reference Blanchard, Cornejo Maceda, Fan, Li, Zhou, Noack and Sapsis2021). The optimal mixing is facilitated by combining flapping and helical forcing, like machine learning control for the same configuration (Zhou et al. Reference Zhou, Fan, Zhang, Li and Noack2020). Moreover, the control performance also benefits from the deployment of more actuators and a richer actuation space. For example, an intelligent nozzle with eighteen electromagnetic flap actuators (Suzuki, Kasagi & Suzuki Reference Suzuki, Kasagi and Suzuki1999) and 8-channel localized arc filament plasma actuators (Utkin et al. Reference Utkin, Keshav, Kim, Kastner, Adamovich and Samimy2006) have been developed for jet control.
In flow control, machine learning techniques have recently gained attention due to their successful applications (Duriez, Brunton & Noack Reference Duriez, Brunton and Noack2017; Brunton, Noack & Koumoutsakos Reference Brunton, Noack and Koumoutsakos2020). Examples are genetic programming and variants (Cornejo Maceda et al. Reference Cornejo Maceda, Li, Lusseyran, Morzyński and Noack2021), reinforcement learning (Rabault et al. Reference Rabault, Kuchta, Jensen, Réglade and Cerardi2019; Guastoni et al. Reference Guastoni, Rabault, Schlatter, Azizpour and Vinuesa2023; Nair & Goza Reference Nair and Goza2023; Sonoda et al. Reference Sonoda, Liu, Itoh and Hasegawa2023; Vignon et al. Reference Vignon, Rabault, Vasanth, Alcántara-Ávila, Mortensen and Vinuesa2023a; Vignon, Rabault & Vinuesa Reference Vignon, Rabault and Vinuesa2023b; Xu & Zhang Reference Xu and Zhang2023) and Bayesian optimization (Blanchard et al. Reference Blanchard, Cornejo Maceda, Fan, Li, Zhou, Noack and Sapsis2021). These methods encode the input–output relations in various forms without requiring prior knowledge. Function regression solvers like genetic programming and deep reinforcement learning can provide a large model capacity for exploration. However, deriving the optimal solution in finite time cannot be guaranteed. Alternatively, a predefined control law can be tuned to near optimal by parameter optimizers like Bayesian optimization (BO), genetic algorithm (GA) and particle swarm optimization (PSO), to name a few. Pino et al. (Reference Pino, Schena, Rabault and Mendez2023) compares genetic programming, deep reinforcement learning and BO in increasingly complex control problems. The authors highlight BO's potential to balance both sample efficiency and the performance of the final solution. With the recent advances in the design of the acquisition function (Blanchard & Sapsis Reference Blanchard and Sapsis2021) and surrogate models (Pickering et al. Reference Pickering, Guth, Karniadakis and Sapsis2022), BO is moving forward in conquering high-dimensional search spaces. This work leverages these advancements to optimize and understand high-dimensional jet forcing modes.
The present study builds on a jet mixing plant employing large eddy simulations (LES) and a rich streamwise and radial actuation space at the nozzle exit. This plant can reproduce virtually all previously considered actuated jet dynamics as elements of a high-dimensional search space. High-dimensional optimization constitutes a challenge that is tackled by a Bayesian optimizer enhanced by deep learning.
The paper is organized as follows. The configuration, actuation and metrics are defined in § 2. The optimizer and numerical solver are presented in § 3. We discuss the learning process and the optimized solutions in § 4. Finally, § 5 concludes the findings with outlook.
2. Set-up and problem definition
2.1. Configuration and actuation
The configuration is a jet flow exiting a circular nozzle of diameter  $D$ as shown in figure 1. The flow is described in a Cartesian coordinate system
$D$ as shown in figure 1. The flow is described in a Cartesian coordinate system  $(x,y,z)$ where
$(x,y,z)$ where  $x$ represents the streamwise direction and the origin coincides with the centre of the nozzle. The computational domain starts from the exit and covers a rectangular region with size
$x$ represents the streamwise direction and the origin coincides with the centre of the nozzle. The computational domain starts from the exit and covers a rectangular region with size  $12D\times 16D\times 12D$. The actuation
$12D\times 16D\times 12D$. The actuation  $\boldsymbol {u}_b(r, \theta, t)$ is imposed with the mean streamwise velocity
$\boldsymbol {u}_b(r, \theta, t)$ is imposed with the mean streamwise velocity  $u_m(r)$ as the inlet velocity profile
$u_m(r)$ as the inlet velocity profile  $u(r, t)$
$u(r, t)$
 \begin{equation} \boldsymbol{u}(r,t) = u_m(r) \boldsymbol{e}_x + \boldsymbol{u}_b(r, \theta, t), \end{equation}
\begin{equation} \boldsymbol{u}(r,t) = u_m(r) \boldsymbol{e}_x + \boldsymbol{u}_b(r, \theta, t), \end{equation}
where  $r$ measures the radial distance from the centreline,
$r$ measures the radial distance from the centreline,  $\boldsymbol{e}_x$ is the unit vector in the x direction, and
$\boldsymbol{e}_x$ is the unit vector in the x direction, and  $\theta$ is the azimuthal angle. The mean streamwise component has a hyperbolic–tangent profile
$\theta$ is the azimuthal angle. The mean streamwise component has a hyperbolic–tangent profile
 \begin{equation} u_m(r) = \frac{U_{{\rm j}}+u_c}{2}-\frac{U_{{\rm j}}-u_c}{2}\tanh\left(\frac{1}{4}\frac{R}{\delta_2} \left(\frac{r}{R}-\frac{R}{r}\right)\right), \end{equation}
\begin{equation} u_m(r) = \frac{U_{{\rm j}}+u_c}{2}-\frac{U_{{\rm j}}-u_c}{2}\tanh\left(\frac{1}{4}\frac{R}{\delta_2} \left(\frac{r}{R}-\frac{R}{r}\right)\right), \end{equation}
where  $U_{{\rm j}}$ is the jet centreline velocity, R is the radius of the nozzle, and
$U_{{\rm j}}$ is the jet centreline velocity, R is the radius of the nozzle, and  $u_{c}=0.03 U_{{\rm j}}$ is the co-flow velocity to mimic a natural suction process and
$u_{c}=0.03 U_{{\rm j}}$ is the co-flow velocity to mimic a natural suction process and  $\delta _2=R/20$ is the momentum boundary layer thickness of the initial shear layer. At the side boundaries, we impose that the vertical velocity equals
$\delta _2=R/20$ is the momentum boundary layer thickness of the initial shear layer. At the side boundaries, we impose that the vertical velocity equals  $u_c$, and the remaining velocity components equal zero. The pressure at the side boundaries is computed from the Neumann condition
$u_c$, and the remaining velocity components equal zero. The pressure at the side boundaries is computed from the Neumann condition  ${\boldsymbol {n}} \boldsymbol{\cdot } \boldsymbol {\nabla } p=0$ with
${\boldsymbol {n}} \boldsymbol{\cdot } \boldsymbol {\nabla } p=0$ with  ${\boldsymbol {n}}$ as the vector normal to the boundary. At the outlet plane, the velocity is computed from a convective boundary condition
${\boldsymbol {n}}$ as the vector normal to the boundary. At the outlet plane, the velocity is computed from a convective boundary condition  $\partial \boldsymbol {u}/\partial t + \tilde {V}_C \partial \boldsymbol {u}/\partial n=0$, where
$\partial \boldsymbol {u}/\partial t + \tilde {V}_C \partial \boldsymbol {u}/\partial n=0$, where  $\tilde {V}_C$ is the instantaneous convection velocity
$\tilde {V}_C$ is the instantaneous convection velocity  $V_C$ limited to positive values:
$V_C$ limited to positive values:  $\tilde {V}_C=\max (V_C,0)$. Here,
$\tilde {V}_C=\max (V_C,0)$. Here,  $V_C$ is the velocity averaged over the outlet plane. The pressure at the outflow equals zero. Such a defined outflow boundary condition ensures stable simulations and has negligible impact on the turbulent flow structures leaving the computational domain (Tyliszczak & Geurts Reference Tyliszczak and Geurts2014; Tyliszczak Reference Tyliszczak2018).
$V_C$ is the velocity averaged over the outlet plane. The pressure at the outflow equals zero. Such a defined outflow boundary condition ensures stable simulations and has negligible impact on the turbulent flow structures leaving the computational domain (Tyliszczak & Geurts Reference Tyliszczak and Geurts2014; Tyliszczak Reference Tyliszczak2018).

Figure 1. Problem set-up including the jet configuration with the designed actuation (a) and the deep- learning-enhanced BO (b). Here,  $\boldsymbol {b}$ is the actuation parameter,
$\boldsymbol {b}$ is the actuation parameter,  $\hat {\boldsymbol {u}}_b$ is the actuation command at the 9 red points indicated in the dashed box.
$\hat {\boldsymbol {u}}_b$ is the actuation command at the 9 red points indicated in the dashed box.
As introduced in § 1, the jet control techniques for mixing enhancement are usually designed according to the instability mode, described by their azimuthal wavenumber at order  $0$ (axisymmetric mode) or
$0$ (axisymmetric mode) or  $1$ (helical mode). The perturbation is either axial or radial. We combine both axial and radial perturbations and define the actuation
$1$ (helical mode). The perturbation is either axial or radial. We combine both axial and radial perturbations and define the actuation  $\boldsymbol {u}_b$ with a general expression of
$\boldsymbol {u}_b$ with a general expression of  $\theta$ and
$\theta$ and  $t$, without assumption on the forcing mode. Therefore, the term
$t$, without assumption on the forcing mode. Therefore, the term  $\boldsymbol {u}_b$ includes an axisymmetric streamwise bulk forcing
$\boldsymbol {u}_b$ includes an axisymmetric streamwise bulk forcing  $u^{\alpha }(r,t)$, and a peripheral forcing with a streamwise component
$u^{\alpha }(r,t)$, and a peripheral forcing with a streamwise component  $u^{\beta }(r,\theta,t)$, and a radial
$u^{\beta }(r,\theta,t)$, and a radial  $u^{\gamma }(r,\theta,t)$
$u^{\gamma }(r,\theta,t)$
 \begin{equation} \boldsymbol{u}_b = (u^\alpha+ u^\beta ) \boldsymbol{e}_x + u^\gamma \boldsymbol{e}_r. \end{equation}
\begin{equation} \boldsymbol{u}_b = (u^\alpha+ u^\beta ) \boldsymbol{e}_x + u^\gamma \boldsymbol{e}_r. \end{equation} The forcing components are the product of a perturbation  $f^m(\theta,t)$ and a radial profile
$f^m(\theta,t)$ and a radial profile  $g^m(r)$:
$g^m(r)$:  $u^m(r,\theta,t) = f^m(\theta,t)g^m(r)$,
$u^m(r,\theta,t) = f^m(\theta,t)g^m(r)$,  $m=\alpha, \beta, \gamma$ with
$m=\alpha, \beta, \gamma$ with  $g^{\alpha }(r)=1$ for
$g^{\alpha }(r)=1$ for  $r \leq R$ and
$r \leq R$ and  $0$ for
$0$ for  $r > R$, and
$r > R$, and  $g^{\beta }(r) = g^{\gamma }(r) = \exp (-1000(R-r)^{2.5})$. The profiles of the three forcing components are depicted in figure 1. The perturbation terms
$g^{\beta }(r) = g^{\gamma }(r) = \exp (-1000(R-r)^{2.5})$. The profiles of the three forcing components are depicted in figure 1. The perturbation terms  $f^m(\theta,t)$ are defined as the sum and product of space- and time-harmonic functions
$f^m(\theta,t)$ are defined as the sum and product of space- and time-harmonic functions
 $$\begin{gather} f^\alpha (t) = \sum_{i=-L}^L \alpha_i \varTheta_i( \omega_\alpha t), \end{gather}$$
$$\begin{gather} f^\alpha (t) = \sum_{i=-L}^L \alpha_i \varTheta_i( \omega_\alpha t), \end{gather}$$ $$\begin{gather}f^\beta(\theta, t) = \sum _{i,j=-L, \ldots, L} \beta_{ij} \varTheta_i(\theta) \varTheta_j(\omega_\beta t), \end{gather}$$
$$\begin{gather}f^\beta(\theta, t) = \sum _{i,j=-L, \ldots, L} \beta_{ij} \varTheta_i(\theta) \varTheta_j(\omega_\beta t), \end{gather}$$ $$\begin{gather}f^\gamma(\theta, t) = \sum _{i,j=-L, \ldots, L} \gamma_{ij} \varTheta_i(\theta) \varTheta_j(\omega_\gamma t), \end{gather}$$
$$\begin{gather}f^\gamma(\theta, t) = \sum _{i,j=-L, \ldots, L} \gamma_{ij} \varTheta_i(\theta) \varTheta_j(\omega_\gamma t), \end{gather}$$
where  $\alpha _i$,
$\alpha _i$,  $\beta _{ij}$,
$\beta _{ij}$,  $\gamma _{ij}$ and
$\gamma _{ij}$ and  $\omega _{\alpha }$,
$\omega _{\alpha }$,  $\omega _{\beta }$,
$\omega _{\beta }$,  $\omega _{\gamma }$ are the actuation amplitudes and angular frequencies, respectively, and
$\omega _{\gamma }$ are the actuation amplitudes and angular frequencies, respectively, and  $\varTheta _i(\phi )$ is the harmonic function basis defined as:
$\varTheta _i(\phi )$ is the harmonic function basis defined as:  $\varTheta _i(\phi )=\sin (i \phi )$ for
$\varTheta _i(\phi )=\sin (i \phi )$ for  $i > 0$,
$i > 0$,  $\varTheta _i(\phi )=1$ for
$\varTheta _i(\phi )=1$ for  $i = 0$, and
$i = 0$, and  $\varTheta _i(\phi )=\cos (i \phi )$ for
$\varTheta _i(\phi )=\cos (i \phi )$ for  $i < 0$. The forcing ansatz can approximate any periodic function of
$i < 0$. The forcing ansatz can approximate any periodic function of  $\theta$ and
$\theta$ and  $t$ as the expansion order increases. In this study, focus is placed on the first-order expansion (
$t$ as the expansion order increases. In this study, focus is placed on the first-order expansion ( $L=1$) of (2.4)–(2.6). Thus, the control law is parameterized by a
$L=1$) of (2.4)–(2.6). Thus, the control law is parameterized by a  $22$-dimensional vector
$22$-dimensional vector  $\boldsymbol {b}$
$\boldsymbol {b}$
 \begin{equation} \boldsymbol{b} = [ St_\alpha, St_\beta, St_\gamma, \alpha_1, \{ \beta_{ij} \}_{i,j=-1,0,-1}, \{ \gamma_{ij} \}_{i,j=-1,0,-1}]^{\intercal} \in \mathcal{B}, \end{equation}
\begin{equation} \boldsymbol{b} = [ St_\alpha, St_\beta, St_\gamma, \alpha_1, \{ \beta_{ij} \}_{i,j=-1,0,-1}, \{ \gamma_{ij} \}_{i,j=-1,0,-1}]^{\intercal} \in \mathcal{B}, \end{equation}
where the Strouhal numbers  $St_m = \omega _m D/2 {\rm \pi}U_{{\rm j}}, m=\alpha,\beta,\gamma$. Note that
$St_m = \omega _m D/2 {\rm \pi}U_{{\rm j}}, m=\alpha,\beta,\gamma$. Note that  $\alpha _0$ is set to 0 as a constant bulk flow can be incorporated into the steady profile. In addition,
$\alpha _0$ is set to 0 as a constant bulk flow can be incorporated into the steady profile. In addition,  $\alpha _{-1} = 0$ can be assumed by a translation in time. The range of
$\alpha _{-1} = 0$ can be assumed by a translation in time. The range of  $St_m$ is set as
$St_m$ is set as  $[0.1,1]$ to include the Strouhal number of the preferred mode at
$[0.1,1]$ to include the Strouhal number of the preferred mode at  $St_p=0.3\unicode{x2013}0.64$ (Crow & Champagne Reference Crow and Champagne1971; Gutmark & Ho Reference Gutmark and Ho1983; Sadeghi & Pollard Reference Sadeghi and Pollard2012), and the range of axisymmetric mode
$St_p=0.3\unicode{x2013}0.64$ (Crow & Champagne Reference Crow and Champagne1971; Gutmark & Ho Reference Gutmark and Ho1983; Sadeghi & Pollard Reference Sadeghi and Pollard2012), and the range of axisymmetric mode  $St_\alpha \in [0.15,0.8]$ where bifurcating and blooming jets are observed (Lee & Reynolds Reference Lee and Reynolds1985; Parekh Reference Parekh1989; Tyliszczak Reference Tyliszczak2018). The actuation amplitudes are limited to
$St_\alpha \in [0.15,0.8]$ where bifurcating and blooming jets are observed (Lee & Reynolds Reference Lee and Reynolds1985; Parekh Reference Parekh1989; Tyliszczak Reference Tyliszczak2018). The actuation amplitudes are limited to  $-0.1 \le \alpha _1, \beta _{ij}, \gamma _{ij} \le 0.1$, lower than the
$-0.1 \le \alpha _1, \beta _{ij}, \gamma _{ij} \le 0.1$, lower than the  $0.15$ used by Danaila & Boersma (Reference Danaila and Boersma2000) and Gohil, Saha & Muralidhar (Reference Gohil, Saha and Muralidhar2015), Tyliszczak (Reference Tyliszczak2018) and
$0.15$ used by Danaila & Boersma (Reference Danaila and Boersma2000) and Gohil, Saha & Muralidhar (Reference Gohil, Saha and Muralidhar2015), Tyliszczak (Reference Tyliszczak2018) and  $0.5$ by Koumoutsakos et al. (Reference Koumoutsakos, Freund and Parekh2001).
$0.5$ by Koumoutsakos et al. (Reference Koumoutsakos, Freund and Parekh2001).
This high-dimensional search space allows the actuation to emulate various forcing modes, such as axisymmetric, helical, flapping, bifurcating, dual mode and harmonic waves discussed in § 1. In short, the forcing can be axisymmetric, statistically axisymmetric and non-axisymmetric.
2.2. Mixing and actuation performance
The mixing process in turbulent jets is typically characterized by quantities such as the decay of centreline velocity and its fluctuations, or the entrainment (Nathan et al. Reference Nathan, Mi, Alwahabi, Newbold and Nobes2006). However, these quantities only measure the local statistics and cannot reflect the mixing process of non-axisymmetric jets, such as bifurcating jets and asymmetric jets. For example, the velocity in these jets may locally drop to zero due to a jet-splitting phenomenon, rather than as a result of enhanced mixing. The entrainment is rather a measure of the amount of surrounding fluid entrained into the jet vicinity, without guaranteeing that it mixes with the jet. In asymmetric jets, the amount of fluid flowing towards the jet may characterize significant radial non-uniformity not revealed by the entrainment. Considering the non-axisymmetric forcing in search spaces, we define a new metric, the equivalent mixing radius  $R_{eq}$, to estimate the spatial uniformity of the streamwise velocity.
$R_{eq}$, to estimate the spatial uniformity of the streamwise velocity.  $R_{eq}$ is defined as the normalized streamwise velocity variance computed at a given
$R_{eq}$ is defined as the normalized streamwise velocity variance computed at a given  $y$–
$y$– $z$ cross-section
$z$ cross-section
 \begin{equation} R_{eq}=\sqrt{2} \sigma,\ \sigma^2 = \frac{\displaystyle \iint \varrho (y,z) [(y-y_c)^2 + (z-z_c)^2 ]\, {\rm d}y\,{\rm d}z}{\displaystyle \iint\varrho (y,z)\, {\rm d}y\,{\rm d}z}, \end{equation}
\begin{equation} R_{eq}=\sqrt{2} \sigma,\ \sigma^2 = \frac{\displaystyle \iint \varrho (y,z) [(y-y_c)^2 + (z-z_c)^2 ]\, {\rm d}y\,{\rm d}z}{\displaystyle \iint\varrho (y,z)\, {\rm d}y\,{\rm d}z}, \end{equation}
with  $\varrho (y,z)=(\langle {u(x=X_0,y,z)}\rangle _t-u_c)/(U_{{\rm j}}-u_c)$,
$\varrho (y,z)=(\langle {u(x=X_0,y,z)}\rangle _t-u_c)/(U_{{\rm j}}-u_c)$,  $X_0=8D$, and
$X_0=8D$, and  $(y_c, z_c)$ the jet centre, as an analogue to the centre of mass:
$(y_c, z_c)$ the jet centre, as an analogue to the centre of mass:  $y_c = \iint y \varrho (y,z) \,{\rm d}y\,{\rm d}z / \iint \varrho (y,z) \,{\rm d}y\,{\rm d}z$ and
$y_c = \iint y \varrho (y,z) \,{\rm d}y\,{\rm d}z / \iint \varrho (y,z) \,{\rm d}y\,{\rm d}z$ and  $z_c = \iint z \varrho (y,z) \,{\rm d}y\,{\rm d}z / \iint \varrho (y,z) \,{\rm d}y\,{\rm d}z$. The
$z_c = \iint z \varrho (y,z) \,{\rm d}y\,{\rm d}z / \iint \varrho (y,z) \,{\rm d}y\,{\rm d}z$. The  $\sqrt {2}$ coefficient is chosen so that the equivalent mixing radius of a top flat jet flow of radius
$\sqrt {2}$ coefficient is chosen so that the equivalent mixing radius of a top flat jet flow of radius  $R$ is
$R$ is  $R$.
$R$.
The amplitude and mass flow rate have been adopted to evaluate the control input. Inspired by Parekh (Reference Parekh1989), we define the momentum flux  $P$ of the actuation to estimate the energy input from a practical perspective. The momentum flux is time averaged and normalized by the jet axial momentum flux at the inlet
$P$ of the actuation to estimate the energy input from a practical perspective. The momentum flux is time averaged and normalized by the jet axial momentum flux at the inlet
 \begin{equation} P=\frac{\left\langle{\displaystyle\iint u^2_b \,{\rm d}A}\right\rangle_t}{{\rm \pi} R^2 U_{j}^2}. \end{equation}
\begin{equation} P=\frac{\left\langle{\displaystyle\iint u^2_b \,{\rm d}A}\right\rangle_t}{{\rm \pi} R^2 U_{j}^2}. \end{equation}3. Methodology
3.1. Deep learning-enhanced Bayesian optimization
The optimization problem to maximize the mixing as a response to the actuation input parameterized by  $\boldsymbol {b}$ is formulated as
$\boldsymbol {b}$ is formulated as
 \begin{equation} \boldsymbol{b}^* = \underset{\boldsymbol{b}\in \mathcal{B}}{\arg \min} \; J(\boldsymbol{b}), \end{equation}
\begin{equation} \boldsymbol{b}^* = \underset{\boldsymbol{b}\in \mathcal{B}}{\arg \min} \; J(\boldsymbol{b}), \end{equation}
where  $\mathcal {B} = [0.1,1]^3\times [-0.1,0.1]^{19} \subset \mathbb {R}^{22}$. Cost function
$\mathcal {B} = [0.1,1]^3\times [-0.1,0.1]^{19} \subset \mathbb {R}^{22}$. Cost function  $J$ is defined as the inverse of the equivalent mixing radius and normalized by the unforced case,
$J$ is defined as the inverse of the equivalent mixing radius and normalized by the unforced case,  $J=R_{eq,0}/R_{eq}$. Better mixing with large
$J=R_{eq,0}/R_{eq}$. Better mixing with large  $R_{eq}$ is related to the decrease of
$R_{eq}$ is related to the decrease of  $J$. The assumed optimization goal leads to the spatial uniformity of
$J$. The assumed optimization goal leads to the spatial uniformity of  $\langle {u(x=X_0,y,z)}\rangle _t$.
$\langle {u(x=X_0,y,z)}\rangle _t$.
To optimize this  $22$-dimensional search space, we employ techniques inspired by BO (Williams & Rasmussen Reference Williams and Rasmussen2006). Bayesian optimization has shown to be advantageous in optimizing expensive black-box functions by systematically reducing uncertainty in the black-box mapping and incorporating prior assumptions of the cost function (Shahriari et al. Reference Shahriari, Swersky, Wang, Adams and De Freitas2015). Through a sequential approach, BO identifies the next actuation to evaluate, or ‘data point’ to acquire, for the purpose of finding the optimum. This is generally achieved via a surrogate model trained on all the queried data and an acquisition function (Williams & Rasmussen Reference Williams and Rasmussen2006). A sketch of the method used in this study is shown in figure 1. The algorithm is initialized with the evaluation of a set
$22$-dimensional search space, we employ techniques inspired by BO (Williams & Rasmussen Reference Williams and Rasmussen2006). Bayesian optimization has shown to be advantageous in optimizing expensive black-box functions by systematically reducing uncertainty in the black-box mapping and incorporating prior assumptions of the cost function (Shahriari et al. Reference Shahriari, Swersky, Wang, Adams and De Freitas2015). Through a sequential approach, BO identifies the next actuation to evaluate, or ‘data point’ to acquire, for the purpose of finding the optimum. This is generally achieved via a surrogate model trained on all the queried data and an acquisition function (Williams & Rasmussen Reference Williams and Rasmussen2006). A sketch of the method used in this study is shown in figure 1. The algorithm is initialized with the evaluation of a set  $\mathcal {D}_0$ of
$\mathcal {D}_0$ of  $N_0$ actuation vectors in
$N_0$ actuation vectors in  $\mathcal {B}$ generated by Latin hypercube sampling. Here,
$\mathcal {B}$ generated by Latin hypercube sampling. Here,  $N_0$ is equal to
$N_0$ is equal to  $N_D+1$ with
$N_D+1$ with  $N_D$ the dimension of the search space
$N_D$ the dimension of the search space  $\mathcal {B}$. We recall that, for this study,
$\mathcal {B}$. We recall that, for this study,  $N_D=22$. The set
$N_D=22$. The set  $\mathcal {D}_0$ includes all the evaluated parameter vectors and their cost
$\mathcal {D}_0$ includes all the evaluated parameter vectors and their cost  $\{\boldsymbol {b}_i, J_i\}_{i=1}^{N_0}$. A surrogate model
$\{\boldsymbol {b}_i, J_i\}_{i=1}^{N_0}$. A surrogate model  $\tilde J$ is trained on the available data to approximate the latent objective function
$\tilde J$ is trained on the available data to approximate the latent objective function  $J$. After the initialization, the algorithm explores the search space
$J$. After the initialization, the algorithm explores the search space  $\mathcal {B}$ one new query at a time. At each iteration, BO determines the optimal actuation to implement next by minimizing an acquisition function
$\mathcal {B}$ one new query at a time. At each iteration, BO determines the optimal actuation to implement next by minimizing an acquisition function  $a(\boldsymbol {b})$. The acquisition function leverages the surrogate model
$a(\boldsymbol {b})$. The acquisition function leverages the surrogate model  $\tilde J$ and available data
$\tilde J$ and available data  $\mathcal {D}_{n-1}$ to guide the data selection in the search space. After each query, the data set is enriched by the new data point
$\mathcal {D}_{n-1}$ to guide the data selection in the search space. After each query, the data set is enriched by the new data point  $\{\boldsymbol {b}_n, J_n\}$ into
$\{\boldsymbol {b}_n, J_n\}$ into  $\mathcal {D}_{n}$ to further refine the surrogate model. When the query budget is met, the algorithm ends with the best design vector
$\mathcal {D}_{n}$ to further refine the surrogate model. When the query budget is met, the algorithm ends with the best design vector  $\boldsymbol {b}^*$ recorded during the optimization.
$\boldsymbol {b}^*$ recorded during the optimization.
The two key elements in BO are the choice of the surrogate model and the sequential strategy (Blanchard & Sapsis Reference Blanchard and Sapsis2021). We focus on the former for a better estimation of the high-dimensional flow control system. Gaussian processes (GP) serve as a successful surrogate model in moderate dimensions and can provide closed-form solutions with the posterior distribution. However, the computation of the posterior costs  $O(n^3)$, where
$O(n^3)$, where  $n$ is the number of observations due to the inverse of the covariance matrix. The number of evaluations required to effectively cover the domain grows exponentially with the dimensionality. This makes GP difficult to scale to large training sets for high-dimensional problems. Recently, the deep operator network (DeepONet) has shown small generalization error for systems where functions are acted upon by an operator (Lu et al. Reference Lu, Jin, Pang, Zhang and Karniadakis2021). Different from GP, that parameterizes the input, DeepONet can map input functions, which are then transformed by an operator to an output function or scalar with improved accuracy. This means that DeepONet does not fall victim to the scaling difficulties of GP when training. Therefore, DeepONet is capable of learning from infinite-dimensional functions. Empirically, DeepONet's utility as an operator surrogate model for Bayesian-inspired experimental design has been shown to significantly outperform GP in several infinite-dimensional systems that exhibit extreme events in Pickering et al. (Reference Pickering, Guth, Karniadakis and Sapsis2022), ranging from stochastic pandemic spikes, to catastrophic structural failure, to rogue wave identification. Through a study of the Bayesian optimizer based on GP (BO) and DeepONet (BO-DeepONet) for the defined 22-dimensional problem (see § 4.2), we propose a new algorithm, deep learning-enhanced Bayesian optimization (BO-DL). By incorporating both GP and DeepONet as the surrogate model, BO-DL presents a better explorative capability and faster convergence. We alternate between DeepONet and GP every
$n$ is the number of observations due to the inverse of the covariance matrix. The number of evaluations required to effectively cover the domain grows exponentially with the dimensionality. This makes GP difficult to scale to large training sets for high-dimensional problems. Recently, the deep operator network (DeepONet) has shown small generalization error for systems where functions are acted upon by an operator (Lu et al. Reference Lu, Jin, Pang, Zhang and Karniadakis2021). Different from GP, that parameterizes the input, DeepONet can map input functions, which are then transformed by an operator to an output function or scalar with improved accuracy. This means that DeepONet does not fall victim to the scaling difficulties of GP when training. Therefore, DeepONet is capable of learning from infinite-dimensional functions. Empirically, DeepONet's utility as an operator surrogate model for Bayesian-inspired experimental design has been shown to significantly outperform GP in several infinite-dimensional systems that exhibit extreme events in Pickering et al. (Reference Pickering, Guth, Karniadakis and Sapsis2022), ranging from stochastic pandemic spikes, to catastrophic structural failure, to rogue wave identification. Through a study of the Bayesian optimizer based on GP (BO) and DeepONet (BO-DeepONet) for the defined 22-dimensional problem (see § 4.2), we propose a new algorithm, deep learning-enhanced Bayesian optimization (BO-DL). By incorporating both GP and DeepONet as the surrogate model, BO-DL presents a better explorative capability and faster convergence. We alternate between DeepONet and GP every  $10$ iterations to query the next sample. The value of
$10$ iterations to query the next sample. The value of  $10$ is chosen empirically to balance the characteristics of the two models and combine their advantages. If the interval is too long, such as
$10$ is chosen empirically to balance the characteristics of the two models and combine their advantages. If the interval is too long, such as  $100$, the models will be more independent rather than interacting with each other. On the other hand, if the interval is too short, such as
$100$, the models will be more independent rather than interacting with each other. On the other hand, if the interval is too short, such as  $1$, the exploitation may be interrupted by uncertainty due to the exchange of models. In GP implementations, the parameter space of a stochastic process is used for both regression and searching. Instead, DeepONet performs regression in the functional space, leveraging the typically disregarded basis functions associated with the parameterization. Here, the function
$1$, the exploitation may be interrupted by uncertainty due to the exchange of models. In GP implementations, the parameter space of a stochastic process is used for both regression and searching. Instead, DeepONet performs regression in the functional space, leveraging the typically disregarded basis functions associated with the parameterization. Here, the function  $\hat {\boldsymbol {u}}_b$ is designed as the actuation command at
$\hat {\boldsymbol {u}}_b$ is designed as the actuation command at  $9$ points located at the jet exit, including the centreline and
$9$ points located at the jet exit, including the centreline and  $8$ equidistant points on the periphery.
$8$ equidistant points on the periphery.
The acquisition function employed is the likelihood-weighted lower confidence bound proposed by Blanchard & Sapsis (Reference Blanchard and Sapsis2021), with superiority in finding rare extreme behaviours
 \begin{equation} a(\boldsymbol{b}) = \mu(\boldsymbol{b}) - \kappa \sigma(\boldsymbol{b}) w(\boldsymbol{b}),\quad w(\boldsymbol{b}) = \frac{p_{\boldsymbol{b}}(\boldsymbol{b})}{p_\mu(\mu(\boldsymbol{b}))}. \end{equation}
\begin{equation} a(\boldsymbol{b}) = \mu(\boldsymbol{b}) - \kappa \sigma(\boldsymbol{b}) w(\boldsymbol{b}),\quad w(\boldsymbol{b}) = \frac{p_{\boldsymbol{b}}(\boldsymbol{b})}{p_\mu(\mu(\boldsymbol{b}))}. \end{equation}
Here,  $\kappa$ balances exploration (large
$\kappa$ balances exploration (large  $\kappa$) and exploitation (small
$\kappa$) and exploitation (small  $\kappa$), and is chosen as
$\kappa$), and is chosen as  $1$. The mean model
$1$. The mean model  $\mu (\boldsymbol {b})$ and standard variance model
$\mu (\boldsymbol {b})$ and standard variance model  $\sigma (\boldsymbol {b})$ are estimated by the mean and variance over a
$\sigma (\boldsymbol {b})$ are estimated by the mean and variance over a  $2$-ensemble of trained DeepONet. For the case of GP, these can be calculated in closed form using standard expressions from GP regression (Williams & Rasmussen Reference Williams and Rasmussen2006). The likelihood ratio
$2$-ensemble of trained DeepONet. For the case of GP, these can be calculated in closed form using standard expressions from GP regression (Williams & Rasmussen Reference Williams and Rasmussen2006). The likelihood ratio  $w(\boldsymbol {b})$ measures relevance by weighting the uncertainty of the point (the input density
$w(\boldsymbol {b})$ measures relevance by weighting the uncertainty of the point (the input density  $p_{\boldsymbol {b}}$) against its expected impact on the cost function (the output density
$p_{\boldsymbol {b}}$) against its expected impact on the cost function (the output density  $p_\mu$).
$p_\mu$).
3.2. Governing equations and numerical solver
We consider an incompressible flow described by the Navier–Stokes equations in the framework of LES
 $$\begin{gather} \frac{\partial \bar{{u}}_j}{\partial x_j}=0, \end{gather}$$
$$\begin{gather} \frac{\partial \bar{{u}}_j}{\partial x_j}=0, \end{gather}$$ $$\begin{gather}\frac{\partial \bar{u}_i}{\partial t}+\frac{\partial {\bar{u}_i \bar{u}_j}}{\partial x_j}=-\frac{1}{{\rho}}\frac{\partial \bar{p} }{\partial x_i}+\frac{\partial \tau_{ij}}{\partial x_j} + \frac{\partial \tau_{ij}^{f}}{\partial x_j}, \end{gather}$$
$$\begin{gather}\frac{\partial \bar{u}_i}{\partial t}+\frac{\partial {\bar{u}_i \bar{u}_j}}{\partial x_j}=-\frac{1}{{\rho}}\frac{\partial \bar{p} }{\partial x_i}+\frac{\partial \tau_{ij}}{\partial x_j} + \frac{\partial \tau_{ij}^{f}}{\partial x_j}, \end{gather}$$
where  ${u}_i$ represents the velocity components,
${u}_i$ represents the velocity components,  $p$ denotes pressure and
$p$ denotes pressure and  $\rho$ is density. The overbar denotes spatially filtered variables,
$\rho$ is density. The overbar denotes spatially filtered variables,  $\bar {f}(\boldsymbol {x},t)=\int _{\varOmega }f(\boldsymbol {x}',t) \mathcal {G}(\boldsymbol {x}-\boldsymbol {x}',\varDelta ) \,{\rm d}\kern0.06em \boldsymbol {x}'$ and
$\bar {f}(\boldsymbol {x},t)=\int _{\varOmega }f(\boldsymbol {x}',t) \mathcal {G}(\boldsymbol {x}-\boldsymbol {x}',\varDelta ) \,{\rm d}\kern0.06em \boldsymbol {x}'$ and  $\mathcal {G}$ is the filter function that fulfils the condition
$\mathcal {G}$ is the filter function that fulfils the condition  $\int _{\varOmega }\mathcal {G}(\boldsymbol {x},\varDelta ) \,{\rm d}\kern0.06em \boldsymbol {x}=1$. A local filter width equals the cube root of the computational cell volume,
$\int _{\varOmega }\mathcal {G}(\boldsymbol {x},\varDelta ) \,{\rm d}\kern0.06em \boldsymbol {x}=1$. A local filter width equals the cube root of the computational cell volume,  $\varDelta =(\Delta x\Delta y\Delta z)^{1/3}$. The stress tensor includes the large-scale term
$\varDelta =(\Delta x\Delta y\Delta z)^{1/3}$. The stress tensor includes the large-scale term  $\tau _{ij}$ and the sub-grid term
$\tau _{ij}$ and the sub-grid term  $\tau _{ij}^{f}$ defined as
$\tau _{ij}^{f}$ defined as
 \begin{equation} \tau_{ij}=2\nu S_{ij},\quad \tau_{ij}^{f}=({\bar{u}_i \bar{u}_j} - \overline{{u}_i{u}_j}), \end{equation}
\begin{equation} \tau_{ij}=2\nu S_{ij},\quad \tau_{ij}^{f}=({\bar{u}_i \bar{u}_j} - \overline{{u}_i{u}_j}), \end{equation}
where  $\nu$ is the kinematic viscosity and
$\nu$ is the kinematic viscosity and  $S_{ij}=\frac {1}{2}({\partial \bar {u}_i}/{\partial x_j} + {\partial \bar {u}_j}/{\partial x_i})$ is the rate of strain tensor of the resolved velocity field. In this work, the sub-filter tensor is modelled by an eddy-viscosity model with
$S_{ij}=\frac {1}{2}({\partial \bar {u}_i}/{\partial x_j} + {\partial \bar {u}_j}/{\partial x_i})$ is the rate of strain tensor of the resolved velocity field. In this work, the sub-filter tensor is modelled by an eddy-viscosity model with  $\tau _{ij}^{f} = 2\nu _tS_{ij} + \tau ^f_{kk}\delta _{ij}/3$. The diagonal terms
$\tau _{ij}^{f} = 2\nu _tS_{ij} + \tau ^f_{kk}\delta _{ij}/3$. The diagonal terms  $\tau ^f_{kk}$ are added to the pressure, resulting in the so-called modified pressure
$\tau ^f_{kk}$ are added to the pressure, resulting in the so-called modified pressure  $\bar {P}=\bar {p}-\rho \tau ^f_{kk}\delta _{ij}/3$. The Vreman subgrid-scale model is used for its low computational cost and very good accuracy in simulating jet flows (Wawrzak, Boguslawski & Tyliszczak Reference Wawrzak, Boguslawski and Tyliszczak2015; Boguslawski, Wawrzak & Tyliszczak Reference Boguslawski, Wawrzak and Tyliszczak2019).
$\bar {P}=\bar {p}-\rho \tau ^f_{kk}\delta _{ij}/3$. The Vreman subgrid-scale model is used for its low computational cost and very good accuracy in simulating jet flows (Wawrzak, Boguslawski & Tyliszczak Reference Wawrzak, Boguslawski and Tyliszczak2015; Boguslawski, Wawrzak & Tyliszczak Reference Boguslawski, Wawrzak and Tyliszczak2019).
The simulations are conducted with the in-house high-order LES solver SAILOR. The solution algorithm is based on the projection method for the pressure–velocity coupling for half-staggered meshes where the pressure nodes are shifted half a cell size from the velocity nodes (Tyliszczak Reference Tyliszczak2014, Reference Tyliszczak2015a). A predictor–corrector method (Adams–Bashforth/Adams–Moulton) is applied for the time integration. Derivative approximations and interpolation on staggered nodes are defined using sixth- and tenth-order compact difference formulas. The SAILOR solver has been used in jet studies with similar dynamic scales as the present work, such as jets undergoing laminar/turbulent transition (Boguslawski et al. Reference Boguslawski, Wawrzak and Tyliszczak2019) and excited jets (Tyliszczak & Geurts Reference Tyliszczak and Geurts2014; Tyliszczak Reference Tyliszczak2018). The applied high-order discretization schemes led to grid-independent results already with relatively coarse meshes.
4. Results
4.1. Validation of the LES with a bifurcating jet
The Reynolds number  $Re = U_{{\rm j}} D/\nu$ is decided as
$Re = U_{{\rm j}} D/\nu$ is decided as  $3000$ for this study. This allows for the use of a relatively coarse computational mesh to obtain reliable and fast simulations as the database. Two meshes are employed in this study. A coarse mesh with
$3000$ for this study. This allows for the use of a relatively coarse computational mesh to obtain reliable and fast simulations as the database. Two meshes are employed in this study. A coarse mesh with  $80\times 160\times 80$ nodes is used for the learning process and a refined mesh with
$80\times 160\times 80$ nodes is used for the learning process and a refined mesh with  $192\times 336\times 192$ nodes is used for the validation and flow analysis of selected cases. The mesh points are compacted in the axial direction towards the inlet using an exponential function and radially towards the jet axis by a tangent hyperbolic function. In the region
$192\times 336\times 192$ nodes is used for the validation and flow analysis of selected cases. The mesh points are compacted in the axial direction towards the inlet using an exponential function and radially towards the jet axis by a tangent hyperbolic function. In the region  $-1.2D< y,z<1.2D$, the mesh spacing is almost uniform and equal to
$-1.2D< y,z<1.2D$, the mesh spacing is almost uniform and equal to  $\Delta y=\Delta z=0.05D$ (46 nodes) on the coarse mesh and
$\Delta y=\Delta z=0.05D$ (46 nodes) on the coarse mesh and  $\Delta y=\Delta z=0.02D$ (115 nodes) on the dense one. In the axial direction, the sizes of the cells in the direct inlet vicinity are
$\Delta y=\Delta z=0.02D$ (115 nodes) on the dense one. In the axial direction, the sizes of the cells in the direct inlet vicinity are  $\Delta x=0.067D$ and
$\Delta x=0.067D$ and  $\Delta x= 0.032D$ for the coarse and dense meshes, respectively. The time step varies according to the Courant–Friedrichs–Lewy (CFL) condition, with the CFL number equal to 0.5. The jet impulsively injects into quiescent flow and becomes fully developed after
$\Delta x= 0.032D$ for the coarse and dense meshes, respectively. The time step varies according to the Courant–Friedrichs–Lewy (CFL) condition, with the CFL number equal to 0.5. The jet impulsively injects into quiescent flow and becomes fully developed after  $100 D/U_{{\rm j}}$ time units. The time-averaging procedure then starts and lasts for
$100 D/U_{{\rm j}}$ time units. The time-averaging procedure then starts and lasts for  $500D/U_{{\rm j}}$ time units for the statistics to converge. A single simulation on the coarse mesh takes
$500D/U_{{\rm j}}$ time units for the statistics to converge. A single simulation on the coarse mesh takes  $20$ CPU-hours. The whole optimization process with
$20$ CPU-hours. The whole optimization process with  $1000$ converged simulations lasts around
$1000$ converged simulations lasts around  $21$ days, using 40 CPUs of an AMD EPYC 7742 (2.25 GHz) processor. On the dense mesh, a single simulation run takes approximately
$21$ days, using 40 CPUs of an AMD EPYC 7742 (2.25 GHz) processor. On the dense mesh, a single simulation run takes approximately  $576$ CPU-hours. The parallel computation is carried out with the Open MPI interface.
$576$ CPU-hours. The parallel computation is carried out with the Open MPI interface.
As presented in § 3.2, the numerical code employed has been well validated against experimental and numerical data for a series of studies of jet dynamics and control. Here, the code with the assumed perturbation design (2.4–2.6) is verified to obtain the well-documented flow pattern of an excited jet, the bifurcating jet at  $Re=4300$ (Lee & Reynolds Reference Lee and Reynolds1985). The well-known jet is shown in figure 2, produced by the combined axisymmetric and flapping excitation at the frequencies
$Re=4300$ (Lee & Reynolds Reference Lee and Reynolds1985). The well-known jet is shown in figure 2, produced by the combined axisymmetric and flapping excitation at the frequencies  $0.4< St_\alpha <0.6$ and
$0.4< St_\alpha <0.6$ and  $St_\beta =St_\gamma =St_\alpha /2$. Based on the current control definition, the bifurcating jet is reproduced by
$St_\beta =St_\gamma =St_\alpha /2$. Based on the current control definition, the bifurcating jet is reproduced by
 \begin{equation} f^\alpha (t) = \alpha_{1} \varTheta_{1}( \omega_\alpha t), \end{equation}
\begin{equation} f^\alpha (t) = \alpha_{1} \varTheta_{1}( \omega_\alpha t), \end{equation}that produces the axisymmetric excitation and
 \begin{equation} f^\beta(\theta, t) = \beta_{-1,1} \varTheta_{-1}(\theta) \varTheta_{1}(\omega_\beta t), \quad f^\gamma(\theta, t) = \gamma_{-1,1} \varTheta_{-1}(\theta) \varTheta_{1}(\omega_\gamma t), \end{equation}
\begin{equation} f^\beta(\theta, t) = \beta_{-1,1} \varTheta_{-1}(\theta) \varTheta_{1}(\omega_\beta t), \quad f^\gamma(\theta, t) = \gamma_{-1,1} \varTheta_{-1}(\theta) \varTheta_{1}(\omega_\gamma t), \end{equation}
as the flapping mode, simulating the orbital motion of the nozzle tip in the experiment. We take  $\alpha _{1}=0.17$,
$\alpha _{1}=0.17$,  $St_\alpha =0.5$ and assume
$St_\alpha =0.5$ and assume  $St_\beta =St_\gamma =St_\alpha /2$,
$St_\beta =St_\gamma =St_\alpha /2$,  $\beta _{-1,1}^2+\gamma _{-1,1}^2=\alpha _{1}^2$ with
$\beta _{-1,1}^2+\gamma _{-1,1}^2=\alpha _{1}^2$ with  $\beta _{-1,1}=\alpha _{1}\cos (20^\circ )$. This type of excitation is also used in the previous LES simulations of the bifurcating jet (da Silva & Métais Reference da Silva and Métais2002; Tyliszczak & Geurts Reference Tyliszczak and Geurts2014).
$\beta _{-1,1}=\alpha _{1}\cos (20^\circ )$. This type of excitation is also used in the previous LES simulations of the bifurcating jet (da Silva & Métais Reference da Silva and Métais2002; Tyliszczak & Geurts Reference Tyliszczak and Geurts2014).

Figure 2. Validation of the LES solver on the bifurcating jet at  $Re=4300$ (Lee & Reynolds Reference Lee and Reynolds1985). Instantaneous isosurfaces of
$Re=4300$ (Lee & Reynolds Reference Lee and Reynolds1985). Instantaneous isosurfaces of  $Q$-parameter (
$Q$-parameter ( $Q=0.5$) in the bifurcating (a-i) and bisecting planes (a-ii), coloured by the radial velocity
$Q=0.5$) in the bifurcating (a-i) and bisecting planes (a-ii), coloured by the radial velocity  $u_r$. Radial profiles of the time-averaged axial velocity in the bifurcating planes (b-i–iii). The square symbols represent the experimental results of Lee & Reynolds (Reference Lee and Reynolds1985), and the lines represent the simulation results obtained in this study.
$u_r$. Radial profiles of the time-averaged axial velocity in the bifurcating planes (b-i–iii). The square symbols represent the experimental results of Lee & Reynolds (Reference Lee and Reynolds1985), and the lines represent the simulation results obtained in this study.
Figure 2(b-i–iii) shows the time-averaged axial velocity profiles along the radius in the bifurcating plane at the distance  $x/D=5.0,\ 6.5,\ 8.0$ from the inlet. These results were obtained for
$x/D=5.0,\ 6.5,\ 8.0$ from the inlet. These results were obtained for  $Re=4300$, as in Lee & Reynolds (Reference Lee and Reynolds1985), and for
$Re=4300$, as in Lee & Reynolds (Reference Lee and Reynolds1985), and for  $Re=3000$ assumed in the present study. The effect of the Reynolds number on the velocity profiles is small. We attribute such behaviour to a dominating role of the perturbation. The location and level of two peaks, which are associated with the split jet arms, are well predicted by the numerical solutions. The impact of the mesh density on the solution is also negligible, owing to the employed high-order numerical method. This also holds for the optimized jet, see figure 6 of § 4.4.
$Re=3000$ assumed in the present study. The effect of the Reynolds number on the velocity profiles is small. We attribute such behaviour to a dominating role of the perturbation. The location and level of two peaks, which are associated with the split jet arms, are well predicted by the numerical solutions. The impact of the mesh density on the solution is also negligible, owing to the employed high-order numerical method. This also holds for the optimized jet, see figure 6 of § 4.4.
4.2. Bayesian optimization with different surrogate models
We first study the capability of the surrogate model, GP and DeepONet, to predict the cost function  $J$ as a response to the excitation input
$J$ as a response to the excitation input  $\boldsymbol {b}$. Then, the Bayesian optimizers based on each of the two surrogate models (BO and BO-DeepONet) are tested on our plant. Finally, the performance of the proposed method BO-DL in § 3.1 is illustrated.
$\boldsymbol {b}$. Then, the Bayesian optimizers based on each of the two surrogate models (BO and BO-DeepONet) are tested on our plant. Finally, the performance of the proposed method BO-DL in § 3.1 is illustrated.
A  $k$-fold cross-validation training (
$k$-fold cross-validation training ( $k=5$) of the GP and DeepONet model is performed over
$k=5$) of the GP and DeepONet model is performed over  $1000$ data points with
$1000$ data points with  $80/20$ train/test split. The data are extracted randomly out of the database from realizations of Bayesian optimizers. Figure 3(a) shows the prediction
$80/20$ train/test split. The data are extracted randomly out of the database from realizations of Bayesian optimizers. Figure 3(a) shows the prediction  $\tilde {J}(\boldsymbol {b})$ vs the truth
$\tilde {J}(\boldsymbol {b})$ vs the truth  $J(\boldsymbol {b})$ obtained. The distribution of points along the diagonal shows that DeepONet achieves a lower prediction error than GP. This is further explained by the correlation coefficient of
$J(\boldsymbol {b})$ obtained. The distribution of points along the diagonal shows that DeepONet achieves a lower prediction error than GP. This is further explained by the correlation coefficient of  $R=0.89$ for DeepONet, and
$R=0.89$ for DeepONet, and  $0.71$ for GP. The average error of the
$0.71$ for GP. The average error of the  $k$ tests is measured by the mean squared error (MSE). The MSE for GP model is
$k$ tests is measured by the mean squared error (MSE). The MSE for GP model is  $0.01$,
$0.01$,  $1\,\%$ of the range of
$1\,\%$ of the range of  $J$ value. The prediction of the DeepONet model is superior, with a MSE equal to
$J$ value. The prediction of the DeepONet model is superior, with a MSE equal to  $0.005$. The learning process of the Bayesian optimizer with GP (BO) and DeepONet (BO-DeepONet) is shown in figure 3(b-i,ii). In figure 3(b-i), the learning curve of BO displays a plateau after the initial samples (triangles). After
$0.005$. The learning process of the Bayesian optimizer with GP (BO) and DeepONet (BO-DeepONet) is shown in figure 3(b-i,ii). In figure 3(b-i), the learning curve of BO displays a plateau after the initial samples (triangles). After  $160$ samples, new optima are found and followed by continuous exploitation of the samples near the learning curve. The final solution is reached with
$160$ samples, new optima are found and followed by continuous exploitation of the samples near the learning curve. The final solution is reached with  $J=0.274$ after
$J=0.274$ after  $745$ evaluations. When DeepONet is employed (figure 3b-ii), a better solution
$745$ evaluations. When DeepONet is employed (figure 3b-ii), a better solution  $J=0.256$ is found quickly within
$J=0.256$ is found quickly within  $300$ samples. This may be attributed to DeepONet's capability to generalize better for previously unseen data than GP, as the cross-validation indicates (Lu et al. Reference Lu, Jin, Pang, Zhang and Karniadakis2021). After
$300$ samples. This may be attributed to DeepONet's capability to generalize better for previously unseen data than GP, as the cross-validation indicates (Lu et al. Reference Lu, Jin, Pang, Zhang and Karniadakis2021). After  $m=300$, the newly tested parameters cover the entire range of
$m=300$, the newly tested parameters cover the entire range of  $J$, but no further improvement is observed in the learning curve. This suggests that the optimizer focuses on exploration of the search space rather than exploitation like BO. Based on the above observations, a joint surrogate model is proposed for this study to combine the advantages of GP in local exploitation and DeepONet in exploring new minima. The Bayesian optimizer based on this new model is described in § 3.1 and referred to as BO-DL. The learning process of BO-DL is given in figure 3(b-iii) with the samples queried by GP and DeepONet. As indicated by the data points on the learning curve, the queries made by DeepONet (red dots) discovers a new minimum with significant reduction of
$J$, but no further improvement is observed in the learning curve. This suggests that the optimizer focuses on exploration of the search space rather than exploitation like BO. Based on the above observations, a joint surrogate model is proposed for this study to combine the advantages of GP in local exploitation and DeepONet in exploring new minima. The Bayesian optimizer based on this new model is described in § 3.1 and referred to as BO-DL. The learning process of BO-DL is given in figure 3(b-iii) with the samples queried by GP and DeepONet. As indicated by the data points on the learning curve, the queries made by DeepONet (red dots) discovers a new minimum with significant reduction of  $J$, and GP (blue dots) continues to descend. The best solution is obtained at
$J$, and GP (blue dots) continues to descend. The best solution is obtained at  $J=0.237$ within
$J=0.237$ within  $600$ evaluations.
$600$ evaluations.

Figure 3. (a) Prediction of  $J$ by GP (crosses) and DeepONet (dots). Learning curves of
$J$ by GP (crosses) and DeepONet (dots). Learning curves of  $J_{min}$ using BO (b-i), BO-DeepONet (b-ii) and BO-DL (c). (d) Average learning curves of Bayesian optimizers with/without deep leaning.
$J_{min}$ using BO (b-i), BO-DeepONet (b-ii) and BO-DL (c). (d) Average learning curves of Bayesian optimizers with/without deep leaning.
The average performance of the three Bayesian optimizers above is further studied. Each optimizer is employed for three realizations with a fixed budget of  $1000$ evaluations. Figure 3(c) reports the average value of the current optimum
$1000$ evaluations. Figure 3(c) reports the average value of the current optimum  $J_{min}$ from each optimizer with the standard deviation (shaded region) of three runs. The learning curve starts from
$J_{min}$ from each optimizer with the standard deviation (shaded region) of three runs. The learning curve starts from  $J_{min}=0.45$, the lowest cost value after initialization of
$J_{min}=0.45$, the lowest cost value after initialization of  $23$ samples, including the unforced case and the other
$23$ samples, including the unforced case and the other  $22$ controlled cases from Latin hypercube sampling in the search spaces. The unforced case (
$22$ controlled cases from Latin hypercube sampling in the search spaces. The unforced case ( $J=1$) is omitted for better visibility of the data. The maximum cost of the controlled flow is around
$J=1$) is omitted for better visibility of the data. The maximum cost of the controlled flow is around  $0.7$. With around
$0.7$. With around  $750$,
$750$,  $580$ and
$580$ and  $570$ queries, the average lowest costs
$570$ queries, the average lowest costs  $J_{min}$ achieved by BO, BO-DeepONet and BO-DL are
$J_{min}$ achieved by BO, BO-DeepONet and BO-DL are  $J=0.274$ (diamond),
$J=0.274$ (diamond),  $J=0.268$ (square) and
$J=0.268$ (square) and  $J=0.237$ (star), respectively. On average, BO-DeepONet shows the fastest learning speed (dotted line) but with the largest variation. This is owing to DeepONet's capability of predicting the potential minima with a small generalization error. Although the descent of BO is the slowest, the optimal results of the three realizations are consistent. This indicates that GP provides better interpolation around the minima than DeepONet due to its deterministic nature. By combining GP and DeepONet, BO-DL not only demonstrates a comparable learning speed to BO-DeepONet but also inherits the small variance of the final solution from BO. Finally, among the three optimizers, BO-DL derives the best solution. In addition, the warm-up phase during queries
$J=0.237$ (star), respectively. On average, BO-DeepONet shows the fastest learning speed (dotted line) but with the largest variation. This is owing to DeepONet's capability of predicting the potential minima with a small generalization error. Although the descent of BO is the slowest, the optimal results of the three realizations are consistent. This indicates that GP provides better interpolation around the minima than DeepONet due to its deterministic nature. By combining GP and DeepONet, BO-DL not only demonstrates a comparable learning speed to BO-DeepONet but also inherits the small variance of the final solution from BO. Finally, among the three optimizers, BO-DL derives the best solution. In addition, the warm-up phase during queries  $0$ to
$0$ to  $100$ appears to be significantly shortened, denoted by the rectangle in figure 3(c).
$100$ appears to be significantly shortened, denoted by the rectangle in figure 3(c).
The computational cost of the BO loop is also noteworthy. With BO, the computation of the posterior costs is  $O(N^3)$, where
$O(N^3)$, where  $N$ is the number of observations (Williams & Rasmussen Reference Williams and Rasmussen2006). This makes the algorithm quite slow, even after only a few hundred observations. The experience of this study shows that the computation of BO increases from
$N$ is the number of observations (Williams & Rasmussen Reference Williams and Rasmussen2006). This makes the algorithm quite slow, even after only a few hundred observations. The experience of this study shows that the computation of BO increases from  $10$ CPU-seconds to
$10$ CPU-seconds to  $600$ CPU-seconds after
$600$ CPU-seconds after  $1000$ iterations on an AMD EPYC 7742 (2.25 GHz) processor. The BO-DeepONet procedure scales much more favourably. Initially, the first iteration takes
$1000$ iterations on an AMD EPYC 7742 (2.25 GHz) processor. The BO-DeepONet procedure scales much more favourably. Initially, the first iteration takes  $120$ CPU-seconds, increasing only to
$120$ CPU-seconds, increasing only to  $180$ CPU-seconds after
$180$ CPU-seconds after  $1000$ iterations. The combination of the two models in BO-DL compromises the cost to an average level.
$1000$ iterations. The combination of the two models in BO-DL compromises the cost to an average level.
For the high-dimensional physical problem, we show that BO can benefit not only from more accurate surrogate models but also from combining the advantages of parametric and non-parametric predictors. The proposed BO-DL holds a fast convergence and efficient exploration with a GP-DeepONet surrogate model. Compared with GP, the proposed surrogate model can provide more accurate predictions by leveraging the hidden functional input with DeepONet and scales better as both data size and dimensionality increase. In addition, a comparison between the Bayesian methods and bio-inspired approaches is given in the Appendix. It is shown that the optimizer with a surrogate model employed, particularly a deep-learning model, shows more advantage in the current problem.
4.3. Exploration and characterization of the search space
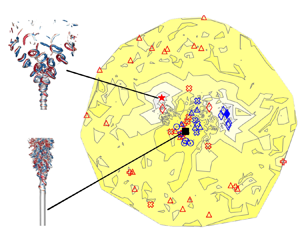
In this section, we explore the learning processes of the BO and BO-DL in the  $22$-dimensional space with persistent data topology (Wang, Cornejo Maceda & Noack Reference Wang, Cornejo Maceda and Noack2023a; Wang et al. Reference Wang, Yang, Chen, Li, Iollo, Cornejo Maceda and Noack2023b). This data analysis identifies the cost function minima and their depth, i.e. their persistence to noise, and was inspired by Edelsbrunner & Harer (Reference Edelsbrunner and Harer2008). The analysis includes the identification of local minima in the high-dimensional actuation space, a dimension reduction to a two-dimensional proximity map and corresponding data visualization, as shown in figure 4. The
$22$-dimensional space with persistent data topology (Wang, Cornejo Maceda & Noack Reference Wang, Cornejo Maceda and Noack2023a; Wang et al. Reference Wang, Yang, Chen, Li, Iollo, Cornejo Maceda and Noack2023b). This data analysis identifies the cost function minima and their depth, i.e. their persistence to noise, and was inspired by Edelsbrunner & Harer (Reference Edelsbrunner and Harer2008). The analysis includes the identification of local minima in the high-dimensional actuation space, a dimension reduction to a two-dimensional proximity map and corresponding data visualization, as shown in figure 4. The  $22$-dimensional data obtained by both BO and BO-DL are projected on a two-dimensional proximity map by classical multidimensional scaling. The feature coordinates
$22$-dimensional data obtained by both BO and BO-DL are projected on a two-dimensional proximity map by classical multidimensional scaling. The feature coordinates  $\gamma _{ij}$ are chosen to optimally preserve the dissimilarity between control parameters defined by the Euclidean distance
$\gamma _{ij}$ are chosen to optimally preserve the dissimilarity between control parameters defined by the Euclidean distance  $D_{ij}=|\boldsymbol {b}_i-\boldsymbol {b}_j|$. The map features two large basins of attraction with low values of
$D_{ij}=|\boldsymbol {b}_i-\boldsymbol {b}_j|$. The map features two large basins of attraction with low values of  $J$, as well as small basins distributed around the border. A point
$J$, as well as small basins distributed around the border. A point  $\boldsymbol {b}_0$ is supposed as a local minimum
$\boldsymbol {b}_0$ is supposed as a local minimum  $\boldsymbol {m}$, if there exists a neighbourhood
$\boldsymbol {m}$, if there exists a neighbourhood  $\mathcal {B}$ of
$\mathcal {B}$ of  $\boldsymbol {b}_0$ that satisfies
$\boldsymbol {b}_0$ that satisfies  $J(\boldsymbol {b}_0) \leq \min _{\boldsymbol {b}\in \mathcal {B}} J(\boldsymbol {b})$. Here,
$J(\boldsymbol {b}_0) \leq \min _{\boldsymbol {b}\in \mathcal {B}} J(\boldsymbol {b})$. Here,  $\mathcal {B}$ is an open set which should include the
$\mathcal {B}$ is an open set which should include the  $K$ nearest neighbours of
$K$ nearest neighbours of  $\boldsymbol {b}_0$ measured by Euclidean distance,
$\boldsymbol {b}_0$ measured by Euclidean distance,  $K\geq N_D+1$. Note that the local minima are assumed based on the obtained discrete data and may change with additional data. A total of
$K\geq N_D+1$. Note that the local minima are assumed based on the obtained discrete data and may change with additional data. A total of  $57$ local minima are extracted from the data, with
$57$ local minima are extracted from the data, with  $36$ found by BO-DL and
$36$ found by BO-DL and  $21$ by BO. In the proximity map, the unforced case is represented by a black square where both algorithms begin. The other symbols denote the derived minima
$21$ by BO. In the proximity map, the unforced case is represented by a black square where both algorithms begin. The other symbols denote the derived minima  $\boldsymbol {m}$ found by BO (blue) and BO-DL (red). The final BO and BO-DL solutions highlighted by the filled diamond (
$\boldsymbol {m}$ found by BO (blue) and BO-DL (red). The final BO and BO-DL solutions highlighted by the filled diamond ( $J=0.27$) and the filled star (
$J=0.27$) and the filled star ( $J=0.24$) are located in the large basins of attractions. Most of the minima queried by BO are located in the centre of the map, whereas BO-DL also explores outward regions. Forced by the control commands corresponding to these minima, different jet patterns are observed, corroborated with the control modes. The axial puffs (circles) are close to the unforced case. The bifurcating type (cross) distributes widely in the cost range. The lower the
$J=0.24$) are located in the large basins of attractions. Most of the minima queried by BO are located in the centre of the map, whereas BO-DL also explores outward regions. Forced by the control commands corresponding to these minima, different jet patterns are observed, corroborated with the control modes. The axial puffs (circles) are close to the unforced case. The bifurcating type (cross) distributes widely in the cost range. The lower the  $J$ value is, the closer to the helix (filled diamond) basin. The jets bifurcating to one side are away from the centre, surrounded by the other unidentified patterns (triangles). Helix (diamond) and blooming (star) jets feature the most substantial performance, but the latter is only detected by BO-DL. Among the
$J$ value is, the closer to the helix (filled diamond) basin. The jets bifurcating to one side are away from the centre, surrounded by the other unidentified patterns (triangles). Helix (diamond) and blooming (star) jets feature the most substantial performance, but the latter is only detected by BO-DL. Among the  $20$ minima explored by BO, the identified patterns include
$20$ minima explored by BO, the identified patterns include  $6$ helix,
$6$ helix,  $5$ flapping and
$5$ flapping and  $4$ axial puffs. Among the
$4$ axial puffs. Among the  $37$ minima explored by BO-DL, the identified patterns include
$37$ minima explored by BO-DL, the identified patterns include  $6$ flapping,
$6$ flapping,  $5$ asymmetric flapping,
$5$ asymmetric flapping,  $2$ helix,
$2$ helix,  $1$ blooming and
$1$ blooming and  $1$ axial puff. In addition, most (
$1$ axial puff. In addition, most ( $22$) of the
$22$) of the  $27$ unidentified patterns are detected by BO-DL.
$27$ unidentified patterns are detected by BO-DL.

Figure 4. Learning process of BO and BO-DL on the proximity map. The unforced case (filled square), the local minima (unfilled symbols) and the final solutions explored by BO (blue-filled diamond) and BO-DL (red-filled star) are highlighted, with related jet patterns.
The proposed BO-DL explores not only more minima than BO but also more diverse flow patterns beneficial to the mixing. This is probably owing to DeepONet's capability to extrapolate the mapping from the high-dimensional actuation to the mixing response more accurately. Two solutions with large basins of attractions in the search space are revealed – the optimal solution with a  $7$-armed blooming jet generated, and the suboptimal with a double-helix shape.
$7$-armed blooming jet generated, and the suboptimal with a double-helix shape.
4.4. Discussion of the optimized solutions
Here, we include three solutions for the discussion: an ad hoc forcing with the best mixing in Tyliszczak (Reference Tyliszczak2018), BO optimized solution and the optimal solution of BO-DL. The forcing command, the instantaneous snapshots and the mean flow fields are presented in figure 5. The forcing commands are expressed by the operators in an order of constant, spatial periodic, temporal periodic and travelling waves in figures 5(a-i), 5(b-i) and 5(c-i). The axial excitation combining axisymmetric and helical modes has been widely employed to study the bifurcating and blooming jets since Lee & Reynolds (Reference Lee and Reynolds1985). A parametric study of the blooming jets with this type of excitation was performed in Tyliszczak (Reference Tyliszczak2018) under the same Reynolds number as this study. Among various multi-armed jets, the one with 11 arms led to the best mixing performance. The excitation was imposed on the axial velocity and combined the axisymmetric mode with the Strouhal number  $St_a=0.45$ and the helical mode with
$St_a=0.45$ and the helical mode with  $St_h=0.164$ at the same amplitude,
$St_h=0.164$ at the same amplitude,  $15\,\%$ of the bulk jet velocity (figure 5a-i). The BO solution contains mainly the axisymmetric mode at an amplitude of
$15\,\%$ of the bulk jet velocity (figure 5a-i). The BO solution contains mainly the axisymmetric mode at an amplitude of  $8\,\%$ with
$8\,\%$ with  $St_\alpha =0.497$ for the bulk, a helical mode at an amplitude of
$St_\alpha =0.497$ for the bulk, a helical mode at an amplitude of  $7\,\%$ and a flapping mode at an amplitude of
$7\,\%$ and a flapping mode at an amplitude of  $4\,\%$ with
$4\,\%$ with  $St_\gamma =0.232$ for radial components in the periphery. After removing the expansions with negligible amplitudes, less than
$St_\gamma =0.232$ for radial components in the periphery. After removing the expansions with negligible amplitudes, less than  $1\,\%$ of the bulk jet, the control law approximately reads
$1\,\%$ of the bulk jet, the control law approximately reads
 \begin{equation}
\left.\begin{array}{c@{}} f^{\alpha}(t) = 0.08 \sin(2 {\rm \pi}
\times 0.497 U_{{\rm j}} t/D), \\ f^{\beta}(\theta,t) \approx 0
,\\ f^{\gamma}(\theta,t) \approx 0.04 \cos(\theta) \sin(2
{\rm \pi} \times 0.232 U_{{\rm j}} t/D) \\ \qquad\qquad -0.07
\cos(\theta- 2 {\rm \pi}\times 0.232 U_{{\rm j}} t/D).
\end{array}\right\}
\end{equation}
\begin{equation}
\left.\begin{array}{c@{}} f^{\alpha}(t) = 0.08 \sin(2 {\rm \pi}
\times 0.497 U_{{\rm j}} t/D), \\ f^{\beta}(\theta,t) \approx 0
,\\ f^{\gamma}(\theta,t) \approx 0.04 \cos(\theta) \sin(2
{\rm \pi} \times 0.232 U_{{\rm j}} t/D) \\ \qquad\qquad -0.07
\cos(\theta- 2 {\rm \pi}\times 0.232 U_{{\rm j}} t/D).
\end{array}\right\}
\end{equation}
Because the removed terms hold an amplitude lower than the turbulence intensity at the jet outlet, the approximation hardly changes the flow patterns, with the relative cost difference being less than  $1\,\%$. The BO-DL solution contains mainly the axisymmetric mode at an amplitude of
$1\,\%$. The BO-DL solution contains mainly the axisymmetric mode at an amplitude of  $6\,\%$ with
$6\,\%$ with  $St_\alpha =0.519$ for the bulk, a helical mode at an amplitude of
$St_\alpha =0.519$ for the bulk, a helical mode at an amplitude of  $8\,\%$ with
$8\,\%$ with  $St_\gamma =0.223$ for radial components in the periphery. The simplified control law reads
$St_\gamma =0.223$ for radial components in the periphery. The simplified control law reads
 \begin{equation} \left.\begin{array}{c@{}} f^{\alpha}(t) = 0.06 \sin(0.519 t), \\ f^{\beta}(\theta,t) \approx 0, \\ f^{\gamma}(\theta,t) \approx 0.08 \cos(\theta+2 {\rm \pi}\times 0.223 U_{{\rm j}} t/D). \end{array}\right\} \end{equation}
\begin{equation} \left.\begin{array}{c@{}} f^{\alpha}(t) = 0.06 \sin(0.519 t), \\ f^{\beta}(\theta,t) \approx 0, \\ f^{\gamma}(\theta,t) \approx 0.08 \cos(\theta+2 {\rm \pi}\times 0.223 U_{{\rm j}} t/D). \end{array}\right\} \end{equation}
Figure 5. Comparison between three mixing jet solutions: (a) the ad hoc solution with the best mixing in Tyliszczak (Reference Tyliszczak2018), (b) the best solution learned with BO and (c) the best solution learned with BO-DL. Top – forcing modes with the associated mixing and actuation metric. Middle – (contour online) bottom view of instantaneous isosurfaces of  $Q=0.5$ coloured by the radial velocity
$Q=0.5$ coloured by the radial velocity  $u_r$. Bottom – (contour online) contour plots of the streamwise velocity on cross-sectional planes at
$u_r$. Bottom – (contour online) contour plots of the streamwise velocity on cross-sectional planes at  $x=2D$,
$x=2D$,  $4D$,
$4D$,  $6D$,
$6D$,  $8D$.
$8D$.
Two significant factors to be noted are the axisymmetric forcing Strouhal number  $St_\alpha$, and the frequency ratio between the axial and helical modes,
$St_\alpha$, and the frequency ratio between the axial and helical modes,  $\alpha =St_\alpha /St_\gamma$. For both BO and BO-DL solutions, the axisymmetric forcing Strouhal number falls into the range
$\alpha =St_\alpha /St_\gamma$. For both BO and BO-DL solutions, the axisymmetric forcing Strouhal number falls into the range  $0.4 \lesssim St_\alpha \lesssim 0.6$ to observe bifurcating and blooming jets, and coincides with around
$0.4 \lesssim St_\alpha \lesssim 0.6$ to observe bifurcating and blooming jets, and coincides with around  $St_\alpha = 0.5$ where the peak spreading occurs (Lee & Reynolds Reference Lee and Reynolds1985; Gohil et al. Reference Gohil, Saha and Muralidhar2015; Shaabani-Ardali et al. Reference Shaabani-Ardali, Sipp and Lesshafft2020). The BO-DL actuation takes a frequency ratio of
$St_\alpha = 0.5$ where the peak spreading occurs (Lee & Reynolds Reference Lee and Reynolds1985; Gohil et al. Reference Gohil, Saha and Muralidhar2015; Shaabani-Ardali et al. Reference Shaabani-Ardali, Sipp and Lesshafft2020). The BO-DL actuation takes a frequency ratio of  $2.34$, which very well agrees with a theoretically derived value
$2.34$, which very well agrees with a theoretically derived value  $\alpha =7/3$ of Tyliszczak (Reference Tyliszczak2015b) and Gohil et al. (Reference Gohil, Saha and Muralidhar2015). Interestingly, the ratio of the BO solution which produces a helix jet (
$\alpha =7/3$ of Tyliszczak (Reference Tyliszczak2015b) and Gohil et al. (Reference Gohil, Saha and Muralidhar2015). Interestingly, the ratio of the BO solution which produces a helix jet ( $\alpha =2.14$) also falls into this range. Moreover, different from the ad hoc excitation using only the axial forcing, the radial component in the periphery plays an important role in solutions optimized by both BO and BO-DL. Shaabani-Ardali et al. (Reference Shaabani-Ardali, Sipp and Lesshafft2020) also concludes radial forcing is the dominant component of helical modes to maximize the spreading angle of a bifurcating jet. We extend the importance of radial forcing to the jet spreading globally. From an estimate of the momentum flux, the solutions in this study take only
$\alpha =2.14$) also falls into this range. Moreover, different from the ad hoc excitation using only the axial forcing, the radial component in the periphery plays an important role in solutions optimized by both BO and BO-DL. Shaabani-Ardali et al. (Reference Shaabani-Ardali, Sipp and Lesshafft2020) also concludes radial forcing is the dominant component of helical modes to maximize the spreading angle of a bifurcating jet. We extend the importance of radial forcing to the jet spreading globally. From an estimate of the momentum flux, the solutions in this study take only  $2.8\,\%$ (BO-DL) and
$2.8\,\%$ (BO-DL) and  $4.8\,\%$ (BO) of the main jet, one order lower than the ad hoc excitation (
$4.8\,\%$ (BO) of the main jet, one order lower than the ad hoc excitation ( $25\,\%$). One reason is the low amplitudes, and another is the forcing applied into the local boundary region (see § 2.1) rather than the whole jet, which leads to a more efficient control. This represents the physical reality of small actuators installed on the wall of the inlet nozzle, like flap arrays in Suzuki et al. (Reference Suzuki, Kasagi and Suzuki1999), only affecting the boundary layers.
$25\,\%$). One reason is the low amplitudes, and another is the forcing applied into the local boundary region (see § 2.1) rather than the whole jet, which leads to a more efficient control. This represents the physical reality of small actuators installed on the wall of the inlet nozzle, like flap arrays in Suzuki et al. (Reference Suzuki, Kasagi and Suzuki1999), only affecting the boundary layers.
The flow structures are presented by the bottom view of the instantaneous  $Q$-parameter isosurfaces (figures 5a-ii, 5b-ii, and 5c-ii). The arms of the ad hoc blooming jet are not explicitly observed due to the interaction between the closely aligned vortex rings. A double-helix jet is formulated by the BO solution. The jet bifurcates into two branches, which rotate with a specific frequency (see figure 8) and then experiences continuous bifurcation along the azimuth until the vortex rings break. This type of jet has not been reported in the literature so far. We reserve it for future investigation. The BO-DL optimized jet produces a
$Q$-parameter isosurfaces (figures 5a-ii, 5b-ii, and 5c-ii). The arms of the ad hoc blooming jet are not explicitly observed due to the interaction between the closely aligned vortex rings. A double-helix jet is formulated by the BO solution. The jet bifurcates into two branches, which rotate with a specific frequency (see figure 8) and then experiences continuous bifurcation along the azimuth until the vortex rings break. This type of jet has not been reported in the literature so far. We reserve it for future investigation. The BO-DL optimized jet produces a  $7$-armed blooming jet, with the vortex rings eventually propagating along
$7$-armed blooming jet, with the vortex rings eventually propagating along  $7$ different trajectories. The contour slices of the time-averaged streamwise velocity also confirm the spreading observed from the vortex rings. The 11 branches generated by the ad hoc forcing can be traced to
$7$ different trajectories. The contour slices of the time-averaged streamwise velocity also confirm the spreading observed from the vortex rings. The 11 branches generated by the ad hoc forcing can be traced to  $x=8D$. The BO-optimized jet shows a more continuous distribution along the circumference due to the azimuthal bifurcation of two helix-shaped arms. The blooming jet is the earliest and furthest spreading. This leads to the largest effective mixing radius,
$x=8D$. The BO-optimized jet shows a more continuous distribution along the circumference due to the azimuthal bifurcation of two helix-shaped arms. The blooming jet is the earliest and furthest spreading. This leads to the largest effective mixing radius,  $4.22 R_{eq,0}$ at
$4.22 R_{eq,0}$ at  $x=8D$, followed by BO optimized jet with
$x=8D$, followed by BO optimized jet with  $R_{eq}=3.65 R_{eq,0}$ and the ad hoc forced jet with
$R_{eq}=3.65 R_{eq,0}$ and the ad hoc forced jet with  $R_{eq}=2.77 R_{eq,0}$.
$R_{eq}=2.77 R_{eq,0}$.
Figure 6 shows the axial profiles of the time-averaged centreline velocity and its fluctuation for the unforced and forced jets. The results obtained on the coarse and dense meshes agree well, except for slight discrepancies in the region  $5D< x< 8D$. Compared with the unforced case in figure 6(a), the length of the potential core shortens significantly from
$5D< x< 8D$. Compared with the unforced case in figure 6(a), the length of the potential core shortens significantly from  $7.5D$ to
$7.5D$ to  $2D$ for both helical and blooming jets. Beyond the potential core, the velocity drops steeply and even reaches small negative values in the blooming jet. As with a similar behaviour observed by Tyliszczak (Reference Tyliszczak2018), this is the effect of jet splitting resulting in a local pressure drop. As a result, the reversal flow amplifies the local turbulence intensity to the peak at
$2D$ for both helical and blooming jets. Beyond the potential core, the velocity drops steeply and even reaches small negative values in the blooming jet. As with a similar behaviour observed by Tyliszczak (Reference Tyliszczak2018), this is the effect of jet splitting resulting in a local pressure drop. As a result, the reversal flow amplifies the local turbulence intensity to the peak at  $x\approx 5D$, as indicated in figure 6(b). The initial fluctuation level in both jets corresponds to the imposed forcing amplitudes of the bulk forcing term. A small decrease at
$x\approx 5D$, as indicated in figure 6(b). The initial fluctuation level in both jets corresponds to the imposed forcing amplitudes of the bulk forcing term. A small decrease at  $x<1D$ is caused by the lack of energy in a range of low wavenumbers (Kempf, Klein & Janicka Reference Kempf, Klein and Janicka2005). For the controlled jets, the waves of the fluctuation profiles around the peak are attributed to the interactions between the Kelvin–Helmholtz instability and the forcing disturbance. Further downstream, the fluctuations drop nearly to zero along with a low mean velocity. The fluctuation profile for the unforced jet shows a very low turbulence level until
$x<1D$ is caused by the lack of energy in a range of low wavenumbers (Kempf, Klein & Janicka Reference Kempf, Klein and Janicka2005). For the controlled jets, the waves of the fluctuation profiles around the peak are attributed to the interactions between the Kelvin–Helmholtz instability and the forcing disturbance. Further downstream, the fluctuations drop nearly to zero along with a low mean velocity. The fluctuation profile for the unforced jet shows a very low turbulence level until  $x\approx 7D$, and then slowly increases to the maximum around
$x\approx 7D$, and then slowly increases to the maximum around  $x=10D$.
$x=10D$.

Figure 6. Mean profiles (a) and fluctuations (b) of the axial velocity for the unforced flow, the helical (BO solution) and the blooming jet (BO-DL solution). The solid and dashed lines denote the results calculated separately by the coarse and dense meshes.
Figure 7 shows the amplitude spectra of the centreline velocity at four locations along the axis,  $x=0D$,
$x=0D$,  $2D$,
$2D$,  $4D$ and
$4D$ and  $6D$. These results are presented vs the Strouhal number
$6D$. These results are presented vs the Strouhal number  $St_D= \omega D/2 {\rm \pi}U_{{\rm j}}$. The spectrum of the unforced jet is nearly flat at the inlet as the imposed turbulent signal does not contain any characteristic frequency. The high-frequency components (
$St_D= \omega D/2 {\rm \pi}U_{{\rm j}}$. The spectrum of the unforced jet is nearly flat at the inlet as the imposed turbulent signal does not contain any characteristic frequency. The high-frequency components ( $St_D>1$) are dampened downstream, and a broadband peak emerges around
$St_D>1$) are dampened downstream, and a broadband peak emerges around  $St_D=0.52$. This falls within the range of the preferred mode frequency
$St_D=0.52$. This falls within the range of the preferred mode frequency  $St_p=0.3-0.64$ (Crow & Champagne Reference Crow and Champagne1971; Gutmark & Ho Reference Gutmark and Ho1983; Sadeghi & Pollard Reference Sadeghi and Pollard2012). Note that the optimal
$St_p=0.3-0.64$ (Crow & Champagne Reference Crow and Champagne1971; Gutmark & Ho Reference Gutmark and Ho1983; Sadeghi & Pollard Reference Sadeghi and Pollard2012). Note that the optimal  $St_\alpha$ predicted by BO-DL for the blooming jet perfectly matches the current preferred mode
$St_\alpha$ predicted by BO-DL for the blooming jet perfectly matches the current preferred mode  $St_p = 0.52$. This finding is consistent with previous studies (Tyliszczak & Geurts Reference Tyliszczak and Geurts2014; Gohil et al. Reference Gohil, Saha and Muralidhar2015; Tyliszczak Reference Tyliszczak2018) which concluded that the jet splitting phenomenon is most pronounced when
$St_p = 0.52$. This finding is consistent with previous studies (Tyliszczak & Geurts Reference Tyliszczak and Geurts2014; Gohil et al. Reference Gohil, Saha and Muralidhar2015; Tyliszczak Reference Tyliszczak2018) which concluded that the jet splitting phenomenon is most pronounced when  $St_\alpha$ is equal to
$St_\alpha$ is equal to  $St_p$. The initial spectra of the helix and blooming jets characterize a distinct peak at
$St_p$. The initial spectra of the helix and blooming jets characterize a distinct peak at  $St_\alpha$. The peaks related to the helical forcing
$St_\alpha$. The peaks related to the helical forcing  $St_\gamma$ can be observed from
$St_\gamma$ can be observed from  $x=2D$. The high-frequency harmonics also appear due to the interactions between generated toroidal vortices. In the case of the helical jet, the peak at
$x=2D$. The high-frequency harmonics also appear due to the interactions between generated toroidal vortices. In the case of the helical jet, the peak at  $St_D\approx 0.032$ is also noteworthy. We find that this frequency coincides with the azimuthal motion of the helical arms, with a period
$St_D\approx 0.032$ is also noteworthy. We find that this frequency coincides with the azimuthal motion of the helical arms, with a period  $T_r$ equal to
$T_r$ equal to  $62.5 D/U_{{\rm j}}$. Figure 8 shows the snapshots of the helical jet, depicting the positions of its arms during the period of
$62.5 D/U_{{\rm j}}$. Figure 8 shows the snapshots of the helical jet, depicting the positions of its arms during the period of  $31.25 D/U_{{\rm j}}$, which corresponds to the detected
$31.25 D/U_{{\rm j}}$, which corresponds to the detected  $St_D\approx 0.032$. The relationship between the frequency of the rotation and the one associated with forcing terms is left for future study.
$St_D\approx 0.032$. The relationship between the frequency of the rotation and the one associated with forcing terms is left for future study.

Figure 7. Axial velocity spectrum for the unforced (a-i–iii), the helical (b-i–iii) and the blooming jet (c-i–iii) at  $x=0D$,
$x=0D$,  $2D$,
$2D$,  $4D$ and
$4D$ and  $6D$.
$6D$.

Figure 8. Instantaneous isosurfaces of  $Q$-parameter (
$Q$-parameter ( $Q=0.5$) for the helical jet, coloured by the radial velocity, in a half-period of the arm rotation. Here,
$Q=0.5$) for the helical jet, coloured by the radial velocity, in a half-period of the arm rotation. Here,  $T_r = 62.5 D/U_{{\rm j}}$.
$T_r = 62.5 D/U_{{\rm j}}$.
5. Conclusions and outlook
We perform a global optimization of the jet control modes, parameterized in a  $22$-dimensional search space. The forcing includes axial and radial components that are defined to approximate a general periodic function of time and azimuthal angle. The design space allows the actuation to emulate various forcing modes that have been studied. This high-dimensional problem for jet mixing improvement is tackled by BO. We advance BO by incorporating a deep-learning-enhanced surrogate model. This surrogate model combines the non-parametric method GP for fast local descent and the parametric method deep operator network (DeepONet) for efficient exploration of the search space. The proposed optimizer BO-DL is more efficient in searching for minima and more scalable to large datasets. To further understand the optimized high-dimensional solutions, we propose a topological analysis of the optimization data. The achieved control landscape features two persistent (pronounced) minima, a global minimum corresponding to a 7-armed blooming jet being generated, and a suboptimal parameter with a double-helix shape that performs comparably. Intriguingly, many of the less persistent minima also correspond to known actuated jet mixing mechanisms.
$22$-dimensional search space. The forcing includes axial and radial components that are defined to approximate a general periodic function of time and azimuthal angle. The design space allows the actuation to emulate various forcing modes that have been studied. This high-dimensional problem for jet mixing improvement is tackled by BO. We advance BO by incorporating a deep-learning-enhanced surrogate model. This surrogate model combines the non-parametric method GP for fast local descent and the parametric method deep operator network (DeepONet) for efficient exploration of the search space. The proposed optimizer BO-DL is more efficient in searching for minima and more scalable to large datasets. To further understand the optimized high-dimensional solutions, we propose a topological analysis of the optimization data. The achieved control landscape features two persistent (pronounced) minima, a global minimum corresponding to a 7-armed blooming jet being generated, and a suboptimal parameter with a double-helix shape that performs comparably. Intriguingly, many of the less persistent minima also correspond to known actuated jet mixing mechanisms.
Compared with the unforced jet, both the helical and the blooming jet shorten the length of the potential core substantially from  $7.5D$ to
$7.5D$ to  $2D$. The valley of the mean centreline velocity is located around
$2D$. The valley of the mean centreline velocity is located around  $6D$ in the downwash, corresponding to the peak of the fluctuation profiles. The reversal flow in the blooming jet amplifies the local turbulence intensity, and leads to even negative velocity in the centreline. Both of the optimized control laws show the radial component dominates the non-axisymmetric forcing mode. The optimized forcing for a helical jet is a triple mode that combines the axisymmetric bulk component, a helical and a flapping mode in the periphery. The
$6D$ in the downwash, corresponding to the peak of the fluctuation profiles. The reversal flow in the blooming jet amplifies the local turbulence intensity, and leads to even negative velocity in the centreline. Both of the optimized control laws show the radial component dominates the non-axisymmetric forcing mode. The optimized forcing for a helical jet is a triple mode that combines the axisymmetric bulk component, a helical and a flapping mode in the periphery. The  $7$-armed blooming jet is produced by a dual-mode forcing with only axisymmetric and helical modes. The better performance of the latter is attributed to the exact match between the axisymmetric forcing Strouhal number and the preferred mode frequency found by BO-DL. The forced flows are characterized by a distinct peak at the Strouhal number of the axisymmetric mode, and the effect of the helical forcing appears later. Intriguingly, a peak at the low Strouhal number in the helical jet coincides with the azimuthal motion of the helical arms.
$7$-armed blooming jet is produced by a dual-mode forcing with only axisymmetric and helical modes. The better performance of the latter is attributed to the exact match between the axisymmetric forcing Strouhal number and the preferred mode frequency found by BO-DL. The forced flows are characterized by a distinct peak at the Strouhal number of the axisymmetric mode, and the effect of the helical forcing appears later. Intriguingly, a peak at the low Strouhal number in the helical jet coincides with the azimuthal motion of the helical arms.
This study emphasizes the importance of effective exploration for machine learning-based optimization in flow control, particularly in high-dimensional design spaces. The proposed BO-DL enhances the explorative feature of BO by improving the model accuracy and increasing the solvable model capacity. Therefore, BO-DL can serve as an alternative to classical BO when there is a need for greater complexity. In addition to parallelizing GP and DeepONet in the Bayesian framework, we can also incrementally increase the model complexity. For example, we can use the controller obtained by GP to accelerate the learning process of DeepONet. Furthermore, DeepONet can also be employed as a function approximator like deep reinforcement learning which deserves future study under a different framework – Bayesian experimental design. As an add on, the proposed persistent data topology analysis can help to characterize the control landscape from the discrete data produced by different optimizers. Persistent data minima indicate literature known and unknown mixing mechanisms. Finally, we expect the proposed BO-DL and topological data analysis for effective learning and characterization of the search spaces could contribute to more flow control problems.
Acknowledgements
We gratefully acknowledge inspiring and formative contributions of A. Blanchard and T. Sapsis to the employed BO algorithm and its interpretation. We express our sincere thanks to Z. Jiang for testing our optimization algorithms in a companion jet mixing experiment and deepening our physical insights and to T. Weise for enriching our roadmap on optimization algorithms and to H. Edelsbrunner and H.-C. Hege for a discussion of topological data analyses.
Funding
This work is supported by the National Natural Science Foundation of China under grants 12172109 and 12302293, by the Guangdong Basic and Applied Basic Research Foundation under grant 2022A1515011492 and by the Shenzhen Science and Technology Program under grant JCYJ20220531095605012. This work is also supported by the Polish National Science Center under grant 2018/31/B/ST8/00762.
Declaration of interests
The authors report no conflict of interest.
Appendix. Comparison of Bayesian optimization with two bio-inspired optimizers
The Bayesian optimizers, BO and BO-DL, employed in this study have been compared with two popular biologically inspired methods (Wahde Reference Wahde2008): PSO and GA. Here, a variant of PSO, particle swarm optimization through targeted, position-mutated, elitism is employed (Shaqarin & Noack Reference Shaqarin and Noack2023), and GA is realized following Wright (Reference Wright1991). Figure 9 displays the learning curve of one realization of the four methods. The learning curves give an indication of the learning speed of each method. Particle swarm optimization converges to a solution with the cost  $J=0.283$ slightly higher than BO (
$J=0.283$ slightly higher than BO ( $J=0.273$), and GA ends with a even higher cost
$J=0.273$), and GA ends with a even higher cost  $J=0.3$. Figure 10 presents all the evaluated points (a), and the local minima (b) derived from the combined database. The tested solutions during the search are denoted by the coloured dots in figure 10(a). The derived minima are denoted by the filled circles with corresponding colours in figure 10(b). The converged solutions are depicted by stars; PSO and GA fall into the local minima in the upper left and the upper right corner, respectively. Interestingly, the search process of these methods show different features. Particle swarm optimization moves all the particles (magenta dots) towards the best region detected. Finally, all particles accumulate in the upper left region and get stuck. The minima (magenta circles) are found along the direction of gradient descent. The genetic algorithm searches the minima in one neighbourhood but is extremely inefficient in exploring further regions. Most of the exploration away from the global minimum in the right upper region in figure 9(a) ends with no local minima in figure 9(b). Owing to the prediction by GP, BO converges to the region with a lower cost quickly. Moreover, with the deep-learning-enhanced surrogate model, BO-DL not only obtains the best minimum (red star) but also reveals more potential minima in a wider neighbourhood (red circles). In high-dimensional search spaces, exploration based on accurate estimators is more efficient than random exploration. For the current problem, the optimizer based on a surrogate model, particularly a deep-learning model, shows more advantages than bio-inspired optimizers.
$J=0.3$. Figure 10 presents all the evaluated points (a), and the local minima (b) derived from the combined database. The tested solutions during the search are denoted by the coloured dots in figure 10(a). The derived minima are denoted by the filled circles with corresponding colours in figure 10(b). The converged solutions are depicted by stars; PSO and GA fall into the local minima in the upper left and the upper right corner, respectively. Interestingly, the search process of these methods show different features. Particle swarm optimization moves all the particles (magenta dots) towards the best region detected. Finally, all particles accumulate in the upper left region and get stuck. The minima (magenta circles) are found along the direction of gradient descent. The genetic algorithm searches the minima in one neighbourhood but is extremely inefficient in exploring further regions. Most of the exploration away from the global minimum in the right upper region in figure 9(a) ends with no local minima in figure 9(b). Owing to the prediction by GP, BO converges to the region with a lower cost quickly. Moreover, with the deep-learning-enhanced surrogate model, BO-DL not only obtains the best minimum (red star) but also reveals more potential minima in a wider neighbourhood (red circles). In high-dimensional search spaces, exploration based on accurate estimators is more efficient than random exploration. For the current problem, the optimizer based on a surrogate model, particularly a deep-learning model, shows more advantages than bio-inspired optimizers.

Figure 9. Learning curves of  $J_{min}$ using BO, BO-DL, PSO and GA.
$J_{min}$ using BO, BO-DL, PSO and GA.

Figure 10. Landscape with visited data (a) and derived local minima (b) of BO (blue), BO-DL (red), PSO (magenta) and GA (green) from unknown in the whole space.
































