












1. Introduction
Heat sinks are ubiquitous in modern computing and telecommunications hardware. More generally, they are an enabling technology in the thermal management of virtually all electronics and elsewhere. Generally, the fins on them are nearly rectangular in cross-section, in which case the heat sink is referred to as a longitudinal-fin heat sink (LFHS) as per figure 1(a). Here,  $x^*$ and
$x^*$ and  $y^*$ are the transverse coordinates, and
$y^*$ are the transverse coordinates, and  $Z^*$ is the streamwise one. Additionally,
$Z^*$ is the streamwise one. Additionally,  $S^*$,
$S^*$,  $t^*$,
$t^*$,  $H^*$ and
$H^*$ and  $c^*$ are the (dimensional) fin spacing, fin thickness, fin height and clearance, respectively. An LFHS is manufactured by various methods (e.g. extrusion, skiving, machining), each imposing constraints on e.g. minimum fin spacing and thickness, maximum fin height-to-spacing ratio, materials and cost as discussed by Iyengar & Bar-Cohen (Reference Iyengar and Bar-Cohen2007). Both an air-cooled LFHS (say, in a laptop) and a water-cooled one (say, in a ‘cold plate’ attached to a central processing unit in a server blade) are common. The materials used for an LFHS are, most commonly, aluminum or copper, although the former is incompatible with water.
$c^*$ are the (dimensional) fin spacing, fin thickness, fin height and clearance, respectively. An LFHS is manufactured by various methods (e.g. extrusion, skiving, machining), each imposing constraints on e.g. minimum fin spacing and thickness, maximum fin height-to-spacing ratio, materials and cost as discussed by Iyengar & Bar-Cohen (Reference Iyengar and Bar-Cohen2007). Both an air-cooled LFHS (say, in a laptop) and a water-cooled one (say, in a ‘cold plate’ attached to a central processing unit in a server blade) are common. The materials used for an LFHS are, most commonly, aluminum or copper, although the former is incompatible with water.

Figure 1. Periodic channel flow in a heat sink, and non-dimensional parameters  $\epsilon$ and
$\epsilon$ and  $c$.
$c$.
A dimensionless analogue of figure 1(a) is shown in figure 1(b), where the asterisks on the variables have been dropped and lengths have been normalized by the fin height. We denote the ratio of fin spacing ( $S^*$) to fin height (
$S^*$) to fin height ( $H^*$) as
$H^*$) as  $\epsilon =S^*/H^*$, which is commonly a small parameter in practice. For example, Iyengar & Bar-Cohen (Reference Iyengar and Bar-Cohen2007) report it to be as low as
$\epsilon =S^*/H^*$, which is commonly a small parameter in practice. For example, Iyengar & Bar-Cohen (Reference Iyengar and Bar-Cohen2007) report it to be as low as  $1/60$,
$1/60$,  $1/40$,
$1/40$,  $1/50$,
$1/50$,  $1/25$ and
$1/25$ and  $1/50$ for bonded, folded, forged, skived and machined fins, respectively. We denote the ratio of clearance (
$1/50$ for bonded, folded, forged, skived and machined fins, respectively. We denote the ratio of clearance ( $c^*$) to fin height as
$c^*$) to fin height as  $c = c^*/H^*$. The domain
$c = c^*/H^*$. The domain  $D$ is bounded by the mixed (no-slip and symmetry – shear-free) boundary conditions along its sides. Fully shrouded heat sinks, where
$D$ is bounded by the mixed (no-slip and symmetry – shear-free) boundary conditions along its sides. Fully shrouded heat sinks, where  $c = 0$, are common as the bypass of flow between the fin tips and a shroud is detrimental to cooling. However, finite clearance is common, and the range of
$c = 0$, are common as the bypass of flow between the fin tips and a shroud is detrimental to cooling. However, finite clearance is common, and the range of  $c$ is highly variable. It may be as low as, say, 0.01, when a small gap is left between fin tips and an adjacent circuit board to accommodate thermal expansion. Conversely, for lower power components, flow bypass is common and the clearance may exceed the fin height (
$c$ is highly variable. It may be as low as, say, 0.01, when a small gap is left between fin tips and an adjacent circuit board to accommodate thermal expansion. Conversely, for lower power components, flow bypass is common and the clearance may exceed the fin height ( $c > 1$). In practice, there is often bypass of flow around the sides of a heat sink as well (Karamanis & Hodes Reference Karamanis and Hodes2019b).
$c > 1$). In practice, there is often bypass of flow around the sides of a heat sink as well (Karamanis & Hodes Reference Karamanis and Hodes2019b).
The foundational (and numerical) study on laminar, forced convection in an LFHS was by Sparrow, Baliga & Patankar (Reference Sparrow, Baliga and Patankar1978). They considered fully developed flow and heat transfer, and allowed for tip clearance between the top of the fins and an adiabatic shroud, but not for bypass flow around the sides of the LFHS. Thermophysical properties were assumed constant. Their key results pertained to an isothermal base, a valid assumption in modern applications when, as is common, the fins are attached to a vapour chamber. A key assumption invoked by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) was that, geometrically, the fins were considered to be vanishingly thin, and they assumed periodicity, i.e. neglected edge effects. Consequently, their fluid domain was rectangular, and due to symmetry, its width was set equal to (half) the fin spacing. Their hydrodynamic results were provided via tabulations of the friction factor times the Reynolds number ( $\,f\,{Re}$) as a function of
$\,f\,{Re}$) as a function of  $\epsilon$ and
$\epsilon$ and  $c$ (
$c$ ( $S$ and
$S$ and  $C$ in their notation). They also provided the average Nusselt numbers based on the total surface area of solid-to-fluid contact, which further depended on the ‘fin conductance parameter’.
$C$ in their notation). They also provided the average Nusselt numbers based on the total surface area of solid-to-fluid contact, which further depended on the ‘fin conductance parameter’.
We note that Sparrow & Hsu (Reference Sparrow and Hsu1981) relaxed the assumption of vanishingly thin fins, largely in the context of how it changes Nusselt number rather than  $f\,{Re}$. Over a limited parametric space of the geometric parameters characterizing an LFHS, the change in
$f\,{Re}$. Over a limited parametric space of the geometric parameters characterizing an LFHS, the change in  $f\,{Re}$ relative to vanishingly thin fins was modest. This is expected as Sparrow considered fin thickness-to-height ratios of 0.01 and 0.1; therefore, far more surface area where the no-slip condition is imposed is along the side of the fin than along its tip. Notably, finite fin thickness introduces an additional singularity, i.e. shear stress will be singular as the top corners of the fins are approached along the tip and side of a fin. Further discussion is provided in § 8.
$f\,{Re}$ relative to vanishingly thin fins was modest. This is expected as Sparrow considered fin thickness-to-height ratios of 0.01 and 0.1; therefore, far more surface area where the no-slip condition is imposed is along the side of the fin than along its tip. Notably, finite fin thickness introduces an additional singularity, i.e. shear stress will be singular as the top corners of the fins are approached along the tip and side of a fin. Further discussion is provided in § 8.
We provide analytical formulae to complement or replace the numerical results of Sparrow et al. (Reference Sparrow, Baliga and Patankar1978). Specifically, we provide an exact formula and four asymptotic formulae for  $f\,{Re}$ (three with clearance and one with no clearance) in the problem studied by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978). The exact formula for
$f\,{Re}$ (three with clearance and one with no clearance) in the problem studied by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978). The exact formula for  $f\,{Re}$ is obtained by solving the two-dimensional flow problem with mixed boundary conditions. This is done by using a conformal mapping approach with easily computable special functions called the Schottky–Klein prime functions (we call these simply ‘the prime functions’) developed by Crowdy (Reference Crowdy2020). The formula is itself new and evaluated in a simple manner, though some computational techniques are needed to evaluate the prime function. Three simple asymptotic formulae for
$f\,{Re}$ is obtained by solving the two-dimensional flow problem with mixed boundary conditions. This is done by using a conformal mapping approach with easily computable special functions called the Schottky–Klein prime functions (we call these simply ‘the prime functions’) developed by Crowdy (Reference Crowdy2020). The formula is itself new and evaluated in a simple manner, though some computational techniques are needed to evaluate the prime function. Three simple asymptotic formulae for  $f\,{Re}$ are then developed when there is tip clearance (
$f\,{Re}$ are then developed when there is tip clearance ( $c>0$), and one with no clearance (
$c>0$), and one with no clearance ( $c=0$). The formulae with clearance correspond to three cases: (1) the fin spacing is small compared to the fin height and clearance; (2) the clearance is small compared to the fin spacing, which is small compared to the fin height; (3) the same as case (2) but valid for larger ratios of clearance to fin spacing, i.e. up to ratios of unity. These formulae are represented by elementary functions, and it will be shown that they are accurate and have complementary ranges of validity. The formula for the case of no clearance, i.e. a rectangular duct, contains no special functions, and it is more accurate than polynomial fits to the exact solution from the literature.
$c=0$). The formulae with clearance correspond to three cases: (1) the fin spacing is small compared to the fin height and clearance; (2) the clearance is small compared to the fin spacing, which is small compared to the fin height; (3) the same as case (2) but valid for larger ratios of clearance to fin spacing, i.e. up to ratios of unity. These formulae are represented by elementary functions, and it will be shown that they are accurate and have complementary ranges of validity. The formula for the case of no clearance, i.e. a rectangular duct, contains no special functions, and it is more accurate than polynomial fits to the exact solution from the literature.
Our results, when used with complementary analytical results for Nusselt numbers (see Kirk & Hodes Reference Kirk and Hodes2024), are useful in the context of the optimization of the geometry of an LFHS as per the studies by Karamanis & Hodes (Reference Karamanis and Hodes2016, Reference Karamanis and Hodes2019b). This is important in the context of minimizing the thermal resistance of an LFHS subject to constraints on, say, its volume and the pump curves for available fans. Such results may also be used to minimize the total power invested in the fabrication and operation (energy used to power a fan or pump) of a heat sink, which is an important sustainability objective (Bar-Cohen & Iyengar Reference Bar-Cohen and Iyengar2003).
Section 2 defines the problem and  $f\,{Re}$. Section 3 summarizes the new formulae for
$f\,{Re}$. Section 3 summarizes the new formulae for  $f\,{Re}$ and compares our asymptotic results to our new exact analytical solution. Section 4 illustrates the use of our results and the physical insight that they provide on the problem. The derivations of the formulae are given in §§ 5–7. Section 8 discusses the connection to another physical problem, which appears in a context of pressure-driven flow in a superhydrophobic microchannel, and § 9 provides our conclusions and final remarks.
$f\,{Re}$ and compares our asymptotic results to our new exact analytical solution. Section 4 illustrates the use of our results and the physical insight that they provide on the problem. The derivations of the formulae are given in §§ 5–7. Section 8 discusses the connection to another physical problem, which appears in a context of pressure-driven flow in a superhydrophobic microchannel, and § 9 provides our conclusions and final remarks.
2. Problem setting
A fully developed longitudinal flow in a channel with periodic fins is considered. Per above, the fin spacing is defined by  $S^*$, the height of the fins is
$S^*$, the height of the fins is  $H^*$, and the clearance is
$H^*$, and the clearance is  $c^*$. The dimensional flow is unidirectional, with velocity
$c^*$. The dimensional flow is unidirectional, with velocity  $w^*(x^*,y^*)$ in the
$w^*(x^*,y^*)$ in the  $Z^*$ direction satisfying
$Z^*$ direction satisfying
 \begin{equation}
\frac{\partial^2 w^*}{\partial x^{*2}} + \frac{\partial^2
w^*}{\partial y^{*2}} =
\frac{1}{\mu}\,\frac{\partial
p^*}{\partial Z^*}, \quad (x^*,y^*) \in D^*,
\end{equation}
\begin{equation}
\frac{\partial^2 w^*}{\partial x^{*2}} + \frac{\partial^2
w^*}{\partial y^{*2}} =
\frac{1}{\mu}\,\frac{\partial
p^*}{\partial Z^*}, \quad (x^*,y^*) \in D^*,
\end{equation}
in a period window  $D^*\equiv \{(x^*,y^*)\,|\, 0\leq x^*\leq S^*,\ 0\leq y^*\leq H^* + c^* \}$, and driven by a constant pressure gradient
$D^*\equiv \{(x^*,y^*)\,|\, 0\leq x^*\leq S^*,\ 0\leq y^*\leq H^* + c^* \}$, and driven by a constant pressure gradient  $-\partial p^*/\partial Z^*$. The fluid viscosity is
$-\partial p^*/\partial Z^*$. The fluid viscosity is  $\mu$. The no-slip condition holds on the shroud, fins and base (referred to as the prime surface in the heat transfer literature), i.e.
$\mu$. The no-slip condition holds on the shroud, fins and base (referred to as the prime surface in the heat transfer literature), i.e.
 $$\begin{gather} w^*(x^*,0) = w^*(x^*,H^*+c^*) = 0,\quad 0\leq x^*\leq S^*, \end{gather}$$
$$\begin{gather} w^*(x^*,0) = w^*(x^*,H^*+c^*) = 0,\quad 0\leq x^*\leq S^*, \end{gather}$$ $$\begin{gather}w^*(0,y^*) = w^*(S^*,y^*) = 0,\quad 0\leq y^* \leq H^*. \end{gather}$$
$$\begin{gather}w^*(0,y^*) = w^*(S^*,y^*) = 0,\quad 0\leq y^* \leq H^*. \end{gather}$$Because of the periodicity, we can impose symmetry conditions along the remaining parts of the boundary above the fin tips, i.e.
 \begin{equation} \frac{\partial w^*}{\partial x^*}(0,y^*) = \frac{\partial w^*}{\partial x^*}(S^*,y^*) = 0,\quad H^*< y^* \leq H^*+c^*. \end{equation}
\begin{equation} \frac{\partial w^*}{\partial x^*}(0,y^*) = \frac{\partial w^*}{\partial x^*}(S^*,y^*) = 0,\quad H^*< y^* \leq H^*+c^*. \end{equation} As mentioned above, we scale lengths with the fin height  $H^*$, so the non-dimensional coordinates are given by
$H^*$, so the non-dimensional coordinates are given by
 \begin{equation} (x,y,Z) = \frac{1}{H^*}\,(x^*,y^*,Z^*), \end{equation}
\begin{equation} (x,y,Z) = \frac{1}{H^*}\,(x^*,y^*,Z^*), \end{equation}and we define a non-dimensional velocity
 \begin{equation} w =-\frac{\mu}{H^{*2}}\left(\frac{\partial p^*}{\partial Z^*}\right)^{-1} w^*. \end{equation}
\begin{equation} w =-\frac{\mu}{H^{*2}}\left(\frac{\partial p^*}{\partial Z^*}\right)^{-1} w^*. \end{equation}
As in Sparrow et al. (Reference Sparrow, Baliga and Patankar1978), we assume that the thickness of the fins is negligible compared to  $H^*$,
$H^*$,  $c^*$ and
$c^*$ and  $S^*$. The non-dimensional parameters are, as per above, defined by
$S^*$. The non-dimensional parameters are, as per above, defined by  $\epsilon \equiv S^*/H^*$ and
$\epsilon \equiv S^*/H^*$ and  $c \equiv c^*/H^*$, which represent the ratio of fin spacing to fin height and clearance to fin height, respectively. The non-dimensional period window is hence given by
$c \equiv c^*/H^*$, which represent the ratio of fin spacing to fin height and clearance to fin height, respectively. The non-dimensional period window is hence given by  $D=\{(x,y) \,|\, 0\leq x \leq \epsilon,\ 0\leq y \leq 1+c\}$, and since the domain is symmetric about the centreline
$D=\{(x,y) \,|\, 0\leq x \leq \epsilon,\ 0\leq y \leq 1+c\}$, and since the domain is symmetric about the centreline  $x=\epsilon /2$, we denote one half of
$x=\epsilon /2$, we denote one half of  $D$ corresponding to
$D$ corresponding to  $0\leq x \leq \epsilon /2$ by
$0\leq x \leq \epsilon /2$ by  $D_{half}$. The geometry is shown in figure 1(b). The non-dimensional flow
$D_{half}$. The geometry is shown in figure 1(b). The non-dimensional flow  $w(x,y)$ then satisfies
$w(x,y)$ then satisfies
 \begin{equation} \frac{\partial^2 w}{\partial x^2} + \frac{\partial^2 w}{\partial y^2} =-1,\quad (x,y) \in D, \end{equation}
\begin{equation} \frac{\partial^2 w}{\partial x^2} + \frac{\partial^2 w}{\partial y^2} =-1,\quad (x,y) \in D, \end{equation}with no-slip conditions
 $$\begin{gather} w(x,0) = w(x,1+c) =0,\quad 0\leq x \leq \epsilon, \end{gather}$$
$$\begin{gather} w(x,0) = w(x,1+c) =0,\quad 0\leq x \leq \epsilon, \end{gather}$$ $$\begin{gather}w(0,y) = w(\epsilon,y)=0,\quad 0\leq y \leq 1, \end{gather}$$
$$\begin{gather}w(0,y) = w(\epsilon,y)=0,\quad 0\leq y \leq 1, \end{gather}$$and symmetry conditions
 \begin{equation} \frac{\partial w}{\partial x}(0,y) = \frac{\partial w}{\partial x}(\epsilon,y) = 0,\quad 1\leq y \leq 1+c.\end{equation}
\begin{equation} \frac{\partial w}{\partial x}(0,y) = \frac{\partial w}{\partial x}(\epsilon,y) = 0,\quad 1\leq y \leq 1+c.\end{equation} After solving the above problem for the velocity  $w(x,y)$ in
$w(x,y)$ in  $D$, the friction factor times the Reynolds number of the channel is calculated by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) as
$D$, the friction factor times the Reynolds number of the channel is calculated by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) as
 \begin{equation} f\,{Re} \equiv \frac{8}{w_{m}}\left(\frac{(1+c)\epsilon}{1+\epsilon}\right)^2, \end{equation}
\begin{equation} f\,{Re} \equiv \frac{8}{w_{m}}\left(\frac{(1+c)\epsilon}{1+\epsilon}\right)^2, \end{equation}
where  $w_{m}$ is the mean velocity in the period window
$w_{m}$ is the mean velocity in the period window  $D$, i.e.
$D$, i.e.
 \begin{equation} w_{m} \equiv \frac{1}{\epsilon(1+c)}\int_D w(x,y)\, {\rm d}\kern0.06em x\,{\rm d} y. \end{equation}
\begin{equation} w_{m} \equiv \frac{1}{\epsilon(1+c)}\int_D w(x,y)\, {\rm d}\kern0.06em x\,{\rm d} y. \end{equation}We note that the foregoing formula from Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) are consistent with their conventional definitions of Reynolds number, equivalent diameter and friction factor.
Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) used the finite difference method to calculate the velocity field, and obtained  $f\,{Re}$ for a limited set of discrete values of
$f\,{Re}$ for a limited set of discrete values of  $\epsilon$ and
$\epsilon$ and  $c$. The main contribution of this paper is to derive exact and accurate explicit asymptotic formulae for (2.11) to allow the easy computation for a wide range of
$c$. The main contribution of this paper is to derive exact and accurate explicit asymptotic formulae for (2.11) to allow the easy computation for a wide range of  $\epsilon$ and
$\epsilon$ and  $c$. Next, we summarize these new formulae for
$c$. Next, we summarize these new formulae for  $f\,{Re}$ in § 3, and provide their derivations in §§ 5–7.
$f\,{Re}$ in § 3, and provide their derivations in §§ 5–7.
3. Summary of new formulae for  $f\,{Re}$
$f\,{Re}$

This section summarizes and discusses the contributions of this paper: formulae for  $f\,{Re}$ with no clearance (
$f\,{Re}$ with no clearance ( $c=0$), and formulae with finite clearance (
$c=0$), and formulae with finite clearance ( $c>0$). The latter includes a new exact formula and various asymptotic formulae for small
$c>0$). The latter includes a new exact formula and various asymptotic formulae for small  $\epsilon$ and/or
$\epsilon$ and/or  $c$.
$c$.
3.1. No clearance ($c=0$)

3.1.1. Exact formula
When there is no clearance, the flow in a period window corresponds to the classical case of flow through a rectangular duct. There is an exact series solution derived in the context of elasticity by Timoshenko & Goodier (Reference Timoshenko and Goodier1970) and reported for fluid flow by e.g. Shah & London (Reference Shah and London1978). We derive a different (and convenient for our purposes) representation for this solution in terms of complex variables. The velocity profile is given by
 \begin{equation} w(x,y) = w_{P,0}(x,y) + \hat{w}_P(x,y),\end{equation}
\begin{equation} w(x,y) = w_{P,0}(x,y) + \hat{w}_P(x,y),\end{equation}where
 $$\begin{gather} w_{P,0}(x,y) \equiv \frac{x(\epsilon- x)}{2},\quad \hat{w}_P(x,y) = {\rm Im}[g(z;0)], \end{gather}$$
$$\begin{gather} w_{P,0}(x,y) \equiv \frac{x(\epsilon- x)}{2},\quad \hat{w}_P(x,y) = {\rm Im}[g(z;0)], \end{gather}$$ $$\begin{gather}g(z;\alpha) \equiv-\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2}{{\rm \pi}^3 n^3 (1+{\rm e}^{-n{\rm \pi}(1+\alpha)/\epsilon})}\,( {\rm e}^{n{\rm \pi}{\rm i} z/\epsilon} - {\rm e}^{-n{\rm \pi}(1 +\alpha+{\rm i} z)/\epsilon}), \end{gather}$$
$$\begin{gather}g(z;\alpha) \equiv-\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2}{{\rm \pi}^3 n^3 (1+{\rm e}^{-n{\rm \pi}(1+\alpha)/\epsilon})}\,( {\rm e}^{n{\rm \pi}{\rm i} z/\epsilon} - {\rm e}^{-n{\rm \pi}(1 +\alpha+{\rm i} z)/\epsilon}), \end{gather}$$
and  $z=x+{\rm i} y$. The function
$z=x+{\rm i} y$. The function  $g(z;\alpha )$ is also used to construct the exact solution for the case
$g(z;\alpha )$ is also used to construct the exact solution for the case  $c>0$ in § 6. The friction factor times the Reynolds number is calculated by the definition (2.11) and an application of Green's second identity as per Appendix B. Recall, the notation
$c>0$ in § 6. The friction factor times the Reynolds number is calculated by the definition (2.11) and an application of Green's second identity as per Appendix B. Recall, the notation  $f\,{Re}$ is used here to represent the friction factor times the Reynolds number, which is calculated by the explicit expression for the mean velocity given by (3.9) with
$f\,{Re}$ is used here to represent the friction factor times the Reynolds number, which is calculated by the explicit expression for the mean velocity given by (3.9) with  $c=0$.
$c=0$.
3.1.2. Case $\epsilon \ll 1$

For  $\epsilon \ll 1$ with
$\epsilon \ll 1$ with  $c=0$, corresponding to a small ratio of fin spacing to height (or a small-aspect-ratio rectangular duct),
$c=0$, corresponding to a small ratio of fin spacing to height (or a small-aspect-ratio rectangular duct),  $f\,{Re}$ can be approximated by
$f\,{Re}$ can be approximated by
 \begin{equation} f\,{Re}_{asymp} \sim \frac{96}{\left(1-\beta\epsilon+\dfrac{384\epsilon}{{\rm \pi}^5}\,({\rm e}^{-{\rm \pi}/\epsilon}-{\rm e}^{-2{\rm \pi}/\epsilon}) \right)(1+\epsilon)^2} + O(\epsilon\, {\rm e}^{-3{\rm \pi}/\epsilon}), \end{equation}
\begin{equation} f\,{Re}_{asymp} \sim \frac{96}{\left(1-\beta\epsilon+\dfrac{384\epsilon}{{\rm \pi}^5}\,({\rm e}^{-{\rm \pi}/\epsilon}-{\rm e}^{-2{\rm \pi}/\epsilon}) \right)(1+\epsilon)^2} + O(\epsilon\, {\rm e}^{-3{\rm \pi}/\epsilon}), \end{equation}
where  $\beta =(186/{\rm \pi} ^5)\,\tilde {\zeta }(5) \approx 0.6302$, and
$\beta =(186/{\rm \pi} ^5)\,\tilde {\zeta }(5) \approx 0.6302$, and  $\tilde {\zeta }(5)$ is the Riemann zeta function evaluated at 5. The derivation of this expression is explained in § 7.
$\tilde {\zeta }(5)$ is the Riemann zeta function evaluated at 5. The derivation of this expression is explained in § 7.
Figure 2 shows the comparison between the exact solution and the asymptotic one, (3.4). We also compare (3.4) with a fitted polynomial expression for  $f\,{Re}$ when
$f\,{Re}$ when  $c=0$ that is commonly used in the literature (Shah & London Reference Shah and London1978):
$c=0$ that is commonly used in the literature (Shah & London Reference Shah and London1978):
 \begin{equation} f\,{Re}_{poly} \approx 96(1-1.3553\epsilon+1.9467\epsilon^2 - 1.7012 \epsilon^3 + 0.9564 \epsilon^4 - 0.2537 \epsilon^5). \end{equation}
\begin{equation} f\,{Re}_{poly} \approx 96(1-1.3553\epsilon+1.9467\epsilon^2 - 1.7012 \epsilon^3 + 0.9564 \epsilon^4 - 0.2537 \epsilon^5). \end{equation}
Even though the new formula (3.4) was derived assuming  $\epsilon \ll 1$, since the error term is exponentially small in
$\epsilon \ll 1$, since the error term is exponentially small in  $\epsilon$, it shows extraordinary accuracy when compared to the exact solution over the entire range
$\epsilon$, it shows extraordinary accuracy when compared to the exact solution over the entire range  $0\leq \epsilon \leq 1$, as shown in figure 2. The new formula contains no infinite sum, and the relative error is less than
$0\leq \epsilon \leq 1$, as shown in figure 2. The new formula contains no infinite sum, and the relative error is less than  $10^{-4}$, even lower than for the polynomial fit (3.5), which was fit to the exact solution over the entire range
$10^{-4}$, even lower than for the polynomial fit (3.5), which was fit to the exact solution over the entire range  $0\leq \epsilon \leq 1$.
$0\leq \epsilon \leq 1$.




3.2. Finite clearance ($c>0$)

For the case of finite (non-zero) clearance, we present an exact solution derived using complex conformal mapping techniques, and three simpler asymptotic solutions in several different limits of  $\epsilon$ and
$\epsilon$ and  $c$.
$c$.
3.2.1. Exact formula
The exact expression for the flow is derived by splitting  $w(x,y)$ into
$w(x,y)$ into  $w_P(x,y)$, which is the flow in a no-slip rectangular duct of width
$w_P(x,y)$, which is the flow in a no-slip rectangular duct of width  $\epsilon$ and height
$\epsilon$ and height  $1+c$, and a correction term
$1+c$, and a correction term  $\hat {w}(x,y)$. That is,
$\hat {w}(x,y)$. That is,
 \begin{equation} w(x,y) = w_P(x,y) + \hat{w}(x,y), \end{equation}
\begin{equation} w(x,y) = w_P(x,y) + \hat{w}(x,y), \end{equation} \begin{equation} w_P(x,y) = w_{P,0}(x,y) + \hat{w}_P(x,y), \end{equation}
\begin{equation} w_P(x,y) = w_{P,0}(x,y) + \hat{w}_P(x,y), \end{equation}
where  $\hat {w}_P={\rm Im}[g(z;c)]$ and the correction
$\hat {w}_P={\rm Im}[g(z;c)]$ and the correction  $\hat {w}(x,y)$ is found to be (see the detailed derivation in § 6)
$\hat {w}(x,y)$ is found to be (see the detailed derivation in § 6)
 \begin{equation} \hat{w}(x,y) = {\rm Im}\left[\frac{1}{2{\rm \pi} {\rm i}}\oint_{C_0}\phi(\zeta')\,[ {\rm d}\log \omega(\zeta',\zeta) + {\rm d}\log \overline{\omega}(\overline{\zeta'},1/\zeta) ]\right], \end{equation}
\begin{equation} \hat{w}(x,y) = {\rm Im}\left[\frac{1}{2{\rm \pi} {\rm i}}\oint_{C_0}\phi(\zeta')\,[ {\rm d}\log \omega(\zeta',\zeta) + {\rm d}\log \overline{\omega}(\overline{\zeta'},1/\zeta) ]\right], \end{equation}
where  $z = {\mathcal {Z}}(\zeta )$ is a conformal map from the upper left unit circle, excluding a smaller inner circle, to the half period window
$z = {\mathcal {Z}}(\zeta )$ is a conformal map from the upper left unit circle, excluding a smaller inner circle, to the half period window  $D_{half}$, as discussed in § 6, and
$D_{half}$, as discussed in § 6, and  $\phi (\zeta )$ is a known real function that ensures that the boundary condition (2.10) is satisfied by the full solution (3.6). Here,
$\phi (\zeta )$ is a known real function that ensures that the boundary condition (2.10) is satisfied by the full solution (3.6). Here,  $\omega ({\cdot },{\cdot })$ is the prime function (Crowdy Reference Crowdy2020) of the triply connected domain illustrated in the right-hand part of figure 10(b).
$\omega ({\cdot },{\cdot })$ is the prime function (Crowdy Reference Crowdy2020) of the triply connected domain illustrated in the right-hand part of figure 10(b).
After calculating the field  $w(x,y)$, it is straightforward to obtain the friction factor times the Reynolds number of the channel. Using the reciprocity theorem proposed by Crowdy (Reference Crowdy2017) (i.e. Green's second identity), the mean velocity of
$w(x,y)$, it is straightforward to obtain the friction factor times the Reynolds number of the channel. Using the reciprocity theorem proposed by Crowdy (Reference Crowdy2017) (i.e. Green's second identity), the mean velocity of  $w(x,y)$ in the period window
$w(x,y)$ in the period window  $D$ can be calculated from knowledge of
$D$ can be calculated from knowledge of  $\hat {w}(x,y)$ on the symmetry boundary only:
$\hat {w}(x,y)$ on the symmetry boundary only:
 \begin{align} w_{m} &= \frac{\epsilon^2}{12} - \frac{1}{1+c}\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^3}{{\rm \pi}^5 n^5 }\tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right)\nonumber\\ &\quad +\frac{1}{1+c}\int_{1}^{1+c}\left(1-\sum_{n=1,3,\ldots}^\infty \frac{8({\rm e}^{-n{\rm \pi} y/\epsilon} + {\rm e}^{n{\rm \pi}(y-1-c)/\epsilon})}{{\rm \pi}^2n^2 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}\right)\hat{w}(0,y)\,{\rm d} y. \end{align}
\begin{align} w_{m} &= \frac{\epsilon^2}{12} - \frac{1}{1+c}\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^3}{{\rm \pi}^5 n^5 }\tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right)\nonumber\\ &\quad +\frac{1}{1+c}\int_{1}^{1+c}\left(1-\sum_{n=1,3,\ldots}^\infty \frac{8({\rm e}^{-n{\rm \pi} y/\epsilon} + {\rm e}^{n{\rm \pi}(y-1-c)/\epsilon})}{{\rm \pi}^2n^2 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}\right)\hat{w}(0,y)\,{\rm d} y. \end{align}
The derivation is explained in detail in Appendix B. Using (3.9),  $f\,{Re}$ then follows from its definition, (2.11). Some numerical results for
$f\,{Re}$ then follows from its definition, (2.11). Some numerical results for  $f\,{Re}$ for a range of
$f\,{Re}$ for a range of  $\epsilon$ and
$\epsilon$ and  $c$ values are plotted in figure 3, and shown to agree with the numerical results of Sparrow et al. (Reference Sparrow, Baliga and Patankar1978). The small differences are attributed to an insufficient number of mesh points by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) due to computational limitations.
$c$ values are plotted in figure 3, and shown to agree with the numerical results of Sparrow et al. (Reference Sparrow, Baliga and Patankar1978). The small differences are attributed to an insufficient number of mesh points by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) due to computational limitations.

Figure 3. Friction factor times Reynolds number plotted against  $\epsilon$ for various choices of clearance
$\epsilon$ for various choices of clearance  $c$, using the exact solution (3.9) and (2.11). Also plotted are the values calculated by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978).
$c$, using the exact solution (3.9) and (2.11). Also plotted are the values calculated by Sparrow et al. (Reference Sparrow, Baliga and Patankar1978).
3.2.2. Case (1): $\epsilon \ll 1$, $\epsilon \ll c$


This case corresponds to the case where the fin spacing is small compared to both the fin height and clearance, i.e.  $\epsilon \ll 1$ and
$\epsilon \ll 1$ and  $\epsilon \ll c$. The flow behaviour becomes significantly different in different parts of the domain, and the method of matched asymptotic expansions can be employed. The main contribution to the mean flow comes from the clearance region above the fins, with a correction due to the flow field near the fin tips. The resulting
$\epsilon \ll c$. The flow behaviour becomes significantly different in different parts of the domain, and the method of matched asymptotic expansions can be employed. The main contribution to the mean flow comes from the clearance region above the fins, with a correction due to the flow field near the fin tips. The resulting  $f\,{Re}$ formula is given by
$f\,{Re}$ formula is given by
 \begin{equation} f\,{Re}_{(1)} \sim \frac{96(1+c)^3\epsilon^2}{\displaystyle{ c^2\left(c + \dfrac{\epsilon \log 8}{\rm \pi}\right)(1+\epsilon)^2 }} + O(\epsilon^4),\quad \epsilon \ll1. \end{equation}
\begin{equation} f\,{Re}_{(1)} \sim \frac{96(1+c)^3\epsilon^2}{\displaystyle{ c^2\left(c + \dfrac{\epsilon \log 8}{\rm \pi}\right)(1+\epsilon)^2 }} + O(\epsilon^4),\quad \epsilon \ll1. \end{equation}The detailed derivation is given in § 7. It is compared to the exact solution at the end of this section in figures 4 and 5.

Figure 4. The relative error calculated by (3.13) for cases (1), (2) and (3). Solid lines and dashed lines correspond to the boundaries of the 1 % and 15 % errors, respectively. A solid line and dashed line exist in the yellow-shaded region of case (2), because the results given by the asymptotics are coincidentally close to the exact  $f\,{Re}$.
$f\,{Re}$.

Figure 5. (a) Illustration of the regions in which the errors defined by (3.13) are less than  $15\,\%$. Almost all regions are covered by the asymptotics
$15\,\%$. Almost all regions are covered by the asymptotics  $f\,{Re}_{(1)}$,
$f\,{Re}_{(1)}$,  $f\,{Re}_{(2)}$ and
$f\,{Re}_{(2)}$ and  $f\,{Re}_{(3)}$. (b) Illustration of the regions in which the errors defined by (3.13) are less than
$f\,{Re}_{(3)}$. (b) Illustration of the regions in which the errors defined by (3.13) are less than  $1\,\%$.
$1\,\%$.
3.2.3. Case (2): $c\ll \epsilon \ll 1$

This case corresponds to the case where the clearance is small compared to the fin spacing ( $c\ll \epsilon$), which in turn is small compared to the fin height (
$c\ll \epsilon$), which in turn is small compared to the fin height ( $\epsilon \ll 1)$. This is similar to case (1) in that
$\epsilon \ll 1)$. This is similar to case (1) in that  $\epsilon \ll 1$, but here we consider
$\epsilon \ll 1$, but here we consider  $c \ll \epsilon$, which is the reverse of (and hence complementary to) case (1), where
$c \ll \epsilon$, which is the reverse of (and hence complementary to) case (1), where  $c \gg \epsilon$. In this case, a different matched asymptotic expansion is considered, leading to the following formula for
$c \gg \epsilon$. In this case, a different matched asymptotic expansion is considered, leading to the following formula for  $f\,{Re}$:
$f\,{Re}$:
 \begin{align} &f\,{Re}_{(2)} \nonumber\\ &\quad \sim \dfrac{96(1+c)^3}{\left[1+c-\epsilon\left(\beta - \dfrac{384}{{\rm \pi}^5}\,({\rm e}^{-{\rm \pi}(1+c)/\epsilon}-{\rm e}^{-2{\rm \pi}(1+c)/\epsilon}) - \dfrac{3c^4}{{\rm \pi}\epsilon^4}\left(\log\left(\dfrac{2\epsilon}{{\rm \pi} c}\right) + \dfrac{3}{2}\right)^2 \right) \right](1+\epsilon)^2}\nonumber\\ &\qquad+ O\left(\epsilon \left(\frac{c}{\epsilon}\right)^4\log \left(\frac{c}{\epsilon}\right)\right) + O(\epsilon\, {\rm e}^{-3{\rm \pi}/\epsilon}), \end{align}
\begin{align} &f\,{Re}_{(2)} \nonumber\\ &\quad \sim \dfrac{96(1+c)^3}{\left[1+c-\epsilon\left(\beta - \dfrac{384}{{\rm \pi}^5}\,({\rm e}^{-{\rm \pi}(1+c)/\epsilon}-{\rm e}^{-2{\rm \pi}(1+c)/\epsilon}) - \dfrac{3c^4}{{\rm \pi}\epsilon^4}\left(\log\left(\dfrac{2\epsilon}{{\rm \pi} c}\right) + \dfrac{3}{2}\right)^2 \right) \right](1+\epsilon)^2}\nonumber\\ &\qquad+ O\left(\epsilon \left(\frac{c}{\epsilon}\right)^4\log \left(\frac{c}{\epsilon}\right)\right) + O(\epsilon\, {\rm e}^{-3{\rm \pi}/\epsilon}), \end{align}
where  $\beta$ is the same constant as defined in (3.4). This formula is derived in § 7. We have included two error terms in (3.11), which are due to the two separate approximations
$\beta$ is the same constant as defined in (3.4). This formula is derived in § 7. We have included two error terms in (3.11), which are due to the two separate approximations  $\epsilon \ll 1$ and
$\epsilon \ll 1$ and  $c\ll \epsilon$. Note that this formula reduces to the asymptotic formula (3.4) when
$c\ll \epsilon$. Note that this formula reduces to the asymptotic formula (3.4) when  $c=0$, therefore this is a generalization of that approximation to
$c=0$, therefore this is a generalization of that approximation to  $0\leq c \ll \epsilon$.
$0\leq c \ll \epsilon$.
3.2.4. Case (3): $c\lesssim \epsilon \ll 1$

This case is similar to case (2) but is shown to be accurate for a wider range of  $\epsilon$ and
$\epsilon$ and  $c$, at a slight increase in complexity. In this case, the clearance
$c$, at a slight increase in complexity. In this case, the clearance  $c$ is assumed to be comparable in size to the spacing
$c$ is assumed to be comparable in size to the spacing  $\epsilon$, which is small. Then only a detailed solution in the clearance region is necessary. Using another (but simpler) conformal mapping approach to that used in (3.8), the flow
$\epsilon$, which is small. Then only a detailed solution in the clearance region is necessary. Using another (but simpler) conformal mapping approach to that used in (3.8), the flow  $\hat {w}(x,y)$ in (3.6) on the symmetry line (
$\hat {w}(x,y)$ in (3.6) on the symmetry line ( $x=0$,
$x=0$,  $1\leq y \leq 1+c$) is approximated by
$1\leq y \leq 1+c$) is approximated by
 \begin{align} \hat{w}(0,y) \sim \hat{A} \left[1 - \frac{(1+\cosh^{1/2}({\rm \pi} c/\epsilon))^2}{(1-\cosh^{1/2}({\rm \pi} c/\epsilon))^2}\times \frac{(\cosh({\rm \pi}(y-1-c)/\epsilon)-\cosh^{1/2}({\rm \pi} c/\epsilon))^2}{(\cosh({\rm \pi}(y-1-c)/\epsilon)+\cosh^{1/2}({\rm \pi} c/\epsilon))^2}\right]^{1/2}, \end{align}
\begin{align} \hat{w}(0,y) \sim \hat{A} \left[1 - \frac{(1+\cosh^{1/2}({\rm \pi} c/\epsilon))^2}{(1-\cosh^{1/2}({\rm \pi} c/\epsilon))^2}\times \frac{(\cosh({\rm \pi}(y-1-c)/\epsilon)-\cosh^{1/2}({\rm \pi} c/\epsilon))^2}{(\cosh({\rm \pi}(y-1-c)/\epsilon)+\cosh^{1/2}({\rm \pi} c/\epsilon))^2}\right]^{1/2}, \end{align}
where  $\hat {A}$ is a parameter calculated by a Fourier integral. Although (3.12) is valid only on
$\hat {A}$ is a parameter calculated by a Fourier integral. Although (3.12) is valid only on  $x=0$,
$x=0$,  $1\leq y\leq 1+c$, it is sufficient to calculate the mean velocity using the reciprocity result (3.9). Then
$1\leq y\leq 1+c$, it is sufficient to calculate the mean velocity using the reciprocity result (3.9). Then  $f\,{Re}$ follows from the definition (2.11). The notation
$f\,{Re}$ follows from the definition (2.11). The notation  $f\,{Re}_{(3)}$ represents the friction factors times the Reynolds number that is calculated by this method.
$f\,{Re}_{(3)}$ represents the friction factors times the Reynolds number that is calculated by this method.
3.2.5. Comparison of cases (1), (2) and (3)
These three expressions (3.10), (3.11) and (3.12) for cases (1), (2) and (3), respectively, are compared with  $f\,{Re}$ calculated by the exact formula (3.6) for a representative range of
$f\,{Re}$ calculated by the exact formula (3.6) for a representative range of  $\epsilon$ and
$\epsilon$ and  $c$ in figure 4. The relative error is defined by (where
$c$ in figure 4. The relative error is defined by (where  $k$ is the case number)
$k$ is the case number)
 \begin{equation} {\rm Error}(\,f\,{Re}_{(k)}) \equiv \frac{|\,f\,{Re} - f\,{Re}_{(k)}|}{f\,{Re}},\quad k = 1,2,3. \end{equation}
\begin{equation} {\rm Error}(\,f\,{Re}_{(k)}) \equiv \frac{|\,f\,{Re} - f\,{Re}_{(k)}|}{f\,{Re}},\quad k = 1,2,3. \end{equation}Solid lines and dashed lines correspond to the boundaries of the 1 % and 10 % errors, respectively.
The three cases are combined in figures 5(a,b), which show the regions where the errors (3.13) between analytical formulae and asymptotics formulae are less than  $15\,\%$ and 1 %, respectively. Together, almost all of the region considered (
$15\,\%$ and 1 %, respectively. Together, almost all of the region considered ( $0.01\leq c$,
$0.01\leq c$,  $\epsilon \leq 1$) is covered by the formulae for cases (1), (2) and (3). Only in the white region, where all asymptotic formulae show an error >15 % (or >1 %), must the exact complex variable solution be used.
$\epsilon \leq 1$) is covered by the formulae for cases (1), (2) and (3). Only in the white region, where all asymptotic formulae show an error >15 % (or >1 %), must the exact complex variable solution be used.
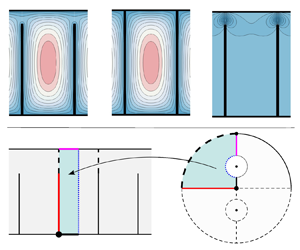
4. Illustrative results
Using (3.6)–(3.8), representative contour plots of the non-dimensional velocity  $w(x,y)$ for (a)
$w(x,y)$ for (a)  $\epsilon=0.5$,
$\epsilon=0.5$,  $c=0$, (b)
$c=0$, (b)  $\epsilon=0.3$,
$\epsilon=0.3$,  $c=0.1$, (c)
$c=0.1$, (c)  $\epsilon=0.4$,
$\epsilon=0.4$,  $c=0.2$, (d)
$c=0.2$, (d)  $\epsilon=0.5$,
$\epsilon=0.5$,  $c=1$, and (e)
$c=1$, and (e)  $\epsilon=0.25$,
$\epsilon=0.25$,  $c=1$ are illustrated in figure 6. When
$c=1$ are illustrated in figure 6. When  $c = 0$, the highest velocity is in the centre of the domain. This is approximately true at the low clearances in figures 6(b,c), i.e.
$c = 0$, the highest velocity is in the centre of the domain. This is approximately true at the low clearances in figures 6(b,c), i.e.  $c = 0.1$ (
$c = 0.1$ ( $\epsilon = 0.3$) and
$\epsilon = 0.3$) and  $c = 0.2$ (
$c = 0.2$ ( $\epsilon = 0.4)$, respectively. However, when the clearance is the same as the fin height (
$\epsilon = 0.4)$, respectively. However, when the clearance is the same as the fin height ( $c = 1$) in figure 6(d) for
$c = 1$) in figure 6(d) for  $\epsilon = 0.5$ and figure 6(e) for
$\epsilon = 0.5$ and figure 6(e) for  $\epsilon = 0.25$, the highest velocity is about midway between the fin tips and shroud. Also, in figures 6(c,d,e), when
$\epsilon = 0.25$, the highest velocity is about midway between the fin tips and shroud. Also, in figures 6(c,d,e), when  $c$ is 0.2 or larger, the velocity is, essentially, dependent upon
$c$ is 0.2 or larger, the velocity is, essentially, dependent upon  $y$ only sufficiently close to the shroud. This is not true, of course, regardless of
$y$ only sufficiently close to the shroud. This is not true, of course, regardless of  $\epsilon$, when
$\epsilon$, when  $c=0$ (figure 6a) and does not apply for
$c=0$ (figure 6a) and does not apply for  $c=0.1$ (
$c=0.1$ ( $\epsilon = 0.3$) (figure 6b). As discussed below, for
$\epsilon = 0.3$) (figure 6b). As discussed below, for  $\epsilon \ll 1$,
$\epsilon \ll 1$,  $\epsilon \ll c$, the flow is parabolic in
$\epsilon \ll c$, the flow is parabolic in  $x$ between the fins, and parabolic in
$x$ between the fins, and parabolic in  $y$ above them, except in an intermediate (overlap) region near the fin tips and an unimportant region near the base.
$y$ above them, except in an intermediate (overlap) region near the fin tips and an unimportant region near the base.












Figure 7 plots, as a function of  $y$, the ratio of the mean velocity over the width of the domain,
$y$, the ratio of the mean velocity over the width of the domain,  $\bar {w}(y)$, to that for the entire domain,
$\bar {w}(y)$, to that for the entire domain,  $w_{m}$. When
$w_{m}$. When  $c=0.1$ (
$c=0.1$ ( $\epsilon = 0.3$) (figure 7b), most of the total flow is between the fins, and when
$\epsilon = 0.3$) (figure 7b), most of the total flow is between the fins, and when  $c=0.2$ (
$c=0.2$ ( $\epsilon = 0.4$) (figure 7c), this is still true. Conversely, when,
$\epsilon = 0.4$) (figure 7c), this is still true. Conversely, when,  $c=1$, a small fraction of the total flow is between the fins, especially as
$c=1$, a small fraction of the total flow is between the fins, especially as  $\epsilon$ is reduced from 0.5 (figure 7d) to 0.25 (figure 7e).
$\epsilon$ is reduced from 0.5 (figure 7d) to 0.25 (figure 7e).

Figure 7. Mean velocity over domain width,  $\bar {w}(y)$, divided by the mean velocity over domain,
$\bar {w}(y)$, divided by the mean velocity over domain,  $w_{m}$, i.e.
$w_{m}$, i.e.  $(1+c)\int _{0}^{\epsilon }w(x,y)\,{\rm d}\kern0.06em x/\int _{D} w(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y$, as a function of
$(1+c)\int _{0}^{\epsilon }w(x,y)\,{\rm d}\kern0.06em x/\int _{D} w(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y$, as a function of  $y$ for (a)
$y$ for (a)  $\epsilon =0.5$,
$\epsilon =0.5$,  $c=0$, (b)
$c=0$, (b)  $\epsilon =0.3$,
$\epsilon =0.3$,  $c=0.1$, (c)
$c=0.1$, (c)  $\epsilon =0.4$,
$\epsilon =0.4$,  $c=0.2$, (d)
$c=0.2$, (d)  $\epsilon =0.5$,
$\epsilon =0.5$,  $c=1$, and (e)
$c=1$, and (e)  $\epsilon =0.25$,
$\epsilon =0.25$,  $c=1$.
$c=1$.
Figure 8 plots the ratio of the local shear stress along the fin (upper row), base (middle row) and shroud (top row) to the mean shear stress along the wetted perimeter of the domain for cases (a)–(e). When  $c=0$, the maximum local shear stress along each of the three surfaces is at its centre. When
$c=0$, the maximum local shear stress along each of the three surfaces is at its centre. When  $c$ is finite, however, this is true along the base and shroud but not the fin. Indeed, there is a square root singularity in shear stress as the tip of the fin is approached. The shear stress along the base is weakest when
$c$ is finite, however, this is true along the base and shroud but not the fin. Indeed, there is a square root singularity in shear stress as the tip of the fin is approached. The shear stress along the base is weakest when  $c = 1$ in figures 8(d,e), when a small fraction of the total flow is between the fins. When
$c = 1$ in figures 8(d,e), when a small fraction of the total flow is between the fins. When  $c=0.2$ and higher (figures 8c)–(e), the local shear stress is essentially constant along the shroud. Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) provides analogous plots for the heat transfer problem.
$c=0.2$ and higher (figures 8c)–(e), the local shear stress is essentially constant along the shroud. Sparrow et al. (Reference Sparrow, Baliga and Patankar1978) provides analogous plots for the heat transfer problem.

Figure 8. Ratio of the local shear stress (i.e.  $\tau = \partial w/\partial n$, where
$\tau = \partial w/\partial n$, where  $n$ is the normal direction pointing into the domain) on the fin, base and shroud to the mean shear stress along the wetted perimeter of the domain,
$n$ is the normal direction pointing into the domain) on the fin, base and shroud to the mean shear stress along the wetted perimeter of the domain,  $\tau _{m}$, i.e.
$\tau _{m}$, i.e.  $\int (\partial w/\partial n)\, {\rm d}s \times 1/(2+2\epsilon )$, for (a)
$\int (\partial w/\partial n)\, {\rm d}s \times 1/(2+2\epsilon )$, for (a)  $\epsilon =0.5$,
$\epsilon =0.5$,  $c=0$, (b)
$c=0$, (b)  $\epsilon =0.3$,
$\epsilon =0.3$,  $c=0.1$, (c)
$c=0.1$, (c)  $\epsilon =0.4$,
$\epsilon =0.4$,  $c=0.2$, (d)
$c=0.2$, (d)  $\epsilon =0.5$,
$\epsilon =0.5$,  $c=1$, and (e)
$c=1$, and (e)  $\epsilon =0.25$,
$\epsilon =0.25$,  $c=1$.
$c=1$.
5. Derivation of an analytical formula for $f\,{Re}$ when $c=0$


For  $c=0$, the flow in a channel corresponds to the flow in a rectangular duct. The flow in a rectangular duct is itself important. This formula is classical and already derived in the context of the theory of elasticity by Timoshenko & Goodier (Reference Timoshenko and Goodier1970) (see Shah & London Reference Shah and London1978). Crowdy also found an explicit solution for
$c=0$, the flow in a channel corresponds to the flow in a rectangular duct. The flow in a rectangular duct is itself important. This formula is classical and already derived in the context of the theory of elasticity by Timoshenko & Goodier (Reference Timoshenko and Goodier1970) (see Shah & London Reference Shah and London1978). Crowdy also found an explicit solution for  $w_P(x,y)$ by using a conformal map from an annular region (see p. 326 in Crowdy Reference Crowdy2020). The derivation is explained here again through complex analysis techniques to make the paper self-contained, and the result will be used to derive the flow with the finite clearance.
$w_P(x,y)$ by using a conformal map from an annular region (see p. 326 in Crowdy Reference Crowdy2020). The derivation is explained here again through complex analysis techniques to make the paper self-contained, and the result will be used to derive the flow with the finite clearance.
Here, we follow the approach proposed by Crowdy (Reference Crowdy2020). The analytical formula for the flow can be derived by splitting  $w(x,y)$ into
$w(x,y)$ into  $w_{P,0}(x,y)$ and
$w_{P,0}(x,y)$ and  $\hat {w}_{P}(x,y)$ defined in (3.1). The function
$\hat {w}_{P}(x,y)$ defined in (3.1). The function  $\hat {w}_P$ is harmonic in
$\hat {w}_P$ is harmonic in  $D$ and satisfies the boundary conditions
$D$ and satisfies the boundary conditions
 $$\begin{gather} \hat{w}_P(x,0) = \hat{w}_P(x,1) =-\frac{x(\epsilon-x)}{2},\quad \text{on} \ 0\leq x \leq \epsilon, \end{gather}$$
$$\begin{gather} \hat{w}_P(x,0) = \hat{w}_P(x,1) =-\frac{x(\epsilon-x)}{2},\quad \text{on} \ 0\leq x \leq \epsilon, \end{gather}$$ $$\begin{gather}\hat{w}_P(0,y) = \hat{w}_P(\epsilon,y)= 0,\quad \text{on}\ 0\leq y \leq 1. \end{gather}$$
$$\begin{gather}\hat{w}_P(0,y) = \hat{w}_P(\epsilon,y)= 0,\quad \text{on}\ 0\leq y \leq 1. \end{gather}$$Now consider the conformal maps
 \begin{equation} \xi = \varTheta(z)= \exp\left(\frac{{\rm \pi} {\rm i} z}{\epsilon} \right),\quad z = {\mathcal{T}}(\xi) = \frac{\epsilon}{{\rm \pi}{\rm i} }\log \xi, \end{equation}
\begin{equation} \xi = \varTheta(z)= \exp\left(\frac{{\rm \pi} {\rm i} z}{\epsilon} \right),\quad z = {\mathcal{T}}(\xi) = \frac{\epsilon}{{\rm \pi}{\rm i} }\log \xi, \end{equation}
where  ${\mathcal {T}}(\xi )$ maps to the whole period window
${\mathcal {T}}(\xi )$ maps to the whole period window  $D$ from the upper half-annulus with the inner radius
$D$ from the upper half-annulus with the inner radius  $q = \exp (-{\rm \pi} /\epsilon )$ in the
$q = \exp (-{\rm \pi} /\epsilon )$ in the  $\xi$-plane. The map is illustrated in figure 9. Note that the bottom wall
$\xi$-plane. The map is illustrated in figure 9. Note that the bottom wall  $0\leq x\leq \epsilon$,
$0\leq x\leq \epsilon$,  $y=0$ is mapped to the upper semicircle of
$y=0$ is mapped to the upper semicircle of  $C_0$ defined by
$C_0$ defined by  $C_0^+$, and the upper wall
$C_0^+$, and the upper wall  $0\leq x\leq \epsilon$,
$0\leq x\leq \epsilon$,  $y=1$ is mapped to the upper semicircle of
$y=1$ is mapped to the upper semicircle of  $C_1$ with the radius
$C_1$ with the radius  $q$ defined by
$q$ defined by  $C_1^+$.
$C_1^+$.

Figure 9. Conformal mapping from the annular region to the whole period window  $D$.
$D$.
Now consider  $g(z;0) \equiv \chi _P+{\rm i} \hat {w}_P$ and
$g(z;0) \equiv \chi _P+{\rm i} \hat {w}_P$ and  $G(\xi )\equiv g({\mathcal {T}}(\xi );0)$. Because of the boundary condition (5.1), the function
$G(\xi )\equiv g({\mathcal {T}}(\xi );0)$. Because of the boundary condition (5.1), the function  $G(\xi )$ satisfies the following boundary conditions on
$G(\xi )$ satisfies the following boundary conditions on  $C_0^+$ and
$C_0^+$ and  $C_1^+$:
$C_1^+$:
 \begin{equation} G(\xi) =-\frac{{\rm Re}[{\mathcal{T}}(\xi)]\,(\epsilon - {\rm Re}[{\mathcal{T}}(\xi)]) }{2},\quad \xi \in C_0^+, C_1^+. \end{equation}
\begin{equation} G(\xi) =-\frac{{\rm Re}[{\mathcal{T}}(\xi)]\,(\epsilon - {\rm Re}[{\mathcal{T}}(\xi)]) }{2},\quad \xi \in C_0^+, C_1^+. \end{equation}Also, because of the boundary condition (5.2) and the map (5.3),
 \begin{equation} {\rm Im}[G(\xi)] = \frac{1}{2{\rm i}}\,(G(\xi) - \overline{G(\xi)}) = 0,\quad \overline{\xi} = \xi. \end{equation}
\begin{equation} {\rm Im}[G(\xi)] = \frac{1}{2{\rm i}}\,(G(\xi) - \overline{G(\xi)}) = 0,\quad \overline{\xi} = \xi. \end{equation}
By using the Schwarz reflection principle, the function  $G(\xi )$ is extended to the lower half-disc outside of the inner circle, and satisfies
$G(\xi )$ is extended to the lower half-disc outside of the inner circle, and satisfies
 \begin{equation} \overline{G}(\xi) = G(\xi), \end{equation}
\begin{equation} \overline{G}(\xi) = G(\xi), \end{equation}
for the whole unit disc outside the inner circle  $C_1$. Using (5.6) the function
$C_1$. Using (5.6) the function  $G(\xi )$ satisfies
$G(\xi )$ satisfies
 \begin{equation} {\rm Im}[G(\xi)]=-{\rm Im}[\overline{G(\xi)}]=-{\rm Im}[G(\overline{\xi})],\quad \xi \in C_0^-, C_1^-, \end{equation}
\begin{equation} {\rm Im}[G(\xi)]=-{\rm Im}[\overline{G(\xi)}]=-{\rm Im}[G(\overline{\xi})],\quad \xi \in C_0^-, C_1^-, \end{equation}
where  $C_0^-$ and
$C_0^-$ and  $C_1^-$ are the lower semicircles of
$C_1^-$ are the lower semicircles of  $C_0$ and
$C_0$ and  $C_1$. Due to (5.4), (5.7) and the property that
$C_1$. Due to (5.4), (5.7) and the property that  ${\rm arg}(\overline {\xi })=-{\rm arg}(\xi )$, the function
${\rm arg}(\overline {\xi })=-{\rm arg}(\xi )$, the function  $G(\xi )$ then satisfies the boundary conditions
$G(\xi )$ then satisfies the boundary conditions
 \begin{equation} {\rm Im}[G(\xi)] = \left\{\begin{array}{@{}ll} -\dfrac{\epsilon^2 \,{\rm arg}(\xi)\,(1-{\rm arg}(\xi)/{\rm \pi})}{2{\rm \pi}}, & \xi \in C_0^+, C_1^+,\\ -\dfrac{\epsilon^2 \,{\rm arg}(\xi)\,(1+{\rm arg}(\xi)/{\rm \pi})}{2{\rm \pi}}, & \xi \in C_0^-, C_1^-. \end{array}\right. \end{equation}
\begin{equation} {\rm Im}[G(\xi)] = \left\{\begin{array}{@{}ll} -\dfrac{\epsilon^2 \,{\rm arg}(\xi)\,(1-{\rm arg}(\xi)/{\rm \pi})}{2{\rm \pi}}, & \xi \in C_0^+, C_1^+,\\ -\dfrac{\epsilon^2 \,{\rm arg}(\xi)\,(1+{\rm arg}(\xi)/{\rm \pi})}{2{\rm \pi}}, & \xi \in C_0^-, C_1^-. \end{array}\right. \end{equation}This can be solved by the Fourier–Laurent series expression. Let
 \begin{equation} G(\xi) = c_0 +\sum_{n=1}^\infty (c_n \xi^n + c_{-n} \xi^{-n}),\quad c_n, c_{-n}\in \mathbb{R}, \end{equation}
\begin{equation} G(\xi) = c_0 +\sum_{n=1}^\infty (c_n \xi^n + c_{-n} \xi^{-n}),\quad c_n, c_{-n}\in \mathbb{R}, \end{equation}
where the fact that  $c_{n},c_{-n}\in \mathbb {R}$ comes from
$c_{n},c_{-n}\in \mathbb {R}$ comes from  ${\rm Im}[G(\xi )]= 0$ on
${\rm Im}[G(\xi )]= 0$ on  $\overline {\xi }=\xi$. From (5.8),
$\overline {\xi }=\xi$. From (5.8),  ${\rm Im}[G(\xi )]={\rm Im}[G(q \xi )]$ for
${\rm Im}[G(\xi )]={\rm Im}[G(q \xi )]$ for  $\xi \in C_0$, which means that the coefficients
$\xi \in C_0$, which means that the coefficients  $c_n$,
$c_n$,  $n\in \mathbb {N}$, should satisfy the special relations
$n\in \mathbb {N}$, should satisfy the special relations  $c_{-n} = -q^{n} c_{n}$,
$c_{-n} = -q^{n} c_{n}$,  $n=1,\ldots,\infty$. These coefficients can be determined by the Fourier sine series representation of the boundary values:
$n=1,\ldots,\infty$. These coefficients can be determined by the Fourier sine series representation of the boundary values:
 \begin{equation} {\rm Im}[{G}({\rm e}^{{\rm i}\theta})] = \sum_{n=1}^{\infty} c_n(1+q^{n})\sin n\theta = b_0(\theta), \end{equation}
\begin{equation} {\rm Im}[{G}({\rm e}^{{\rm i}\theta})] = \sum_{n=1}^{\infty} c_n(1+q^{n})\sin n\theta = b_0(\theta), \end{equation}
where the boundary condition (5.8) is now  $b_0(\theta )$ expressed in terms of
$b_0(\theta )$ expressed in terms of  $\theta$:
$\theta$:
 \begin{equation} b_0(\theta) \equiv \left\{\begin{array}{@{}ll} -\dfrac{\epsilon^2 \theta(1-\theta/{\rm \pi})}{2{\rm \pi}}, & 0\leq\theta\leq {\rm \pi},\\ -\dfrac{\epsilon^2 \theta(1+\theta/{\rm \pi})}{2{\rm \pi}}, & -{\rm \pi}\leq\theta\leq 0. \end{array}\right. \end{equation}
\begin{equation} b_0(\theta) \equiv \left\{\begin{array}{@{}ll} -\dfrac{\epsilon^2 \theta(1-\theta/{\rm \pi})}{2{\rm \pi}}, & 0\leq\theta\leq {\rm \pi},\\ -\dfrac{\epsilon^2 \theta(1+\theta/{\rm \pi})}{2{\rm \pi}}, & -{\rm \pi}\leq\theta\leq 0. \end{array}\right. \end{equation}
The coefficients  $c_n$ can be obtained by the standard Fourier integral:
$c_n$ can be obtained by the standard Fourier integral:
 \begin{equation} c_n =-\frac{2\epsilon^2 (1-(-1)^n)}{{\rm \pi}^3 (1+q^n) n^3},\quad n=1,\ldots, \infty, \end{equation}
\begin{equation} c_n =-\frac{2\epsilon^2 (1-(-1)^n)}{{\rm \pi}^3 (1+q^n) n^3},\quad n=1,\ldots, \infty, \end{equation}where we have used the relation
 \begin{equation} \int_{0}^{\rm \pi} \theta({\rm \pi}-\theta)\sin n\theta\, {\rm d}\theta + \int_{-{\rm \pi}}^{0} \theta ({\rm \pi}+\theta)\sin n\theta \,{\rm d}\theta = \frac{4(1-(-1)^n)}{n^3}. \end{equation}
\begin{equation} \int_{0}^{\rm \pi} \theta({\rm \pi}-\theta)\sin n\theta\, {\rm d}\theta + \int_{-{\rm \pi}}^{0} \theta ({\rm \pi}+\theta)\sin n\theta \,{\rm d}\theta = \frac{4(1-(-1)^n)}{n^3}. \end{equation}By substituting the original Laurent expression (5.9),
 \begin{equation} {G}(\xi) =-\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2}{{\rm \pi}^3 n^3 (1+q^n)}\,( \xi^n - q^n \xi^{-n} ). \end{equation}
\begin{equation} {G}(\xi) =-\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2}{{\rm \pi}^3 n^3 (1+q^n)}\,( \xi^n - q^n \xi^{-n} ). \end{equation}
Using the conformal map  $\xi =\varTheta (z)$ defined by (5.3), the final formula (3.3) is derived.
$\xi =\varTheta (z)$ defined by (5.3), the final formula (3.3) is derived.
6. Derivation of analytical formulae for $f\,{Re}$ when $c>0$


Here, a complex analysis formulation for the exact solution when  $c>0$ given in (3.6)–(3.8) is introduced. The flow
$c>0$ given in (3.6)–(3.8) is introduced. The flow  $w(x,y)$ is decomposed into the flow in a rectangular duct and a flow harmonic in
$w(x,y)$ is decomposed into the flow in a rectangular duct and a flow harmonic in  $D$ as follows:
$D$ as follows:
 \begin{equation} w(x,y) = w_P(x,y) + \hat{w}(x,y), \end{equation}
\begin{equation} w(x,y) = w_P(x,y) + \hat{w}(x,y), \end{equation}
where  $w_P(x,y)$ is a pressure-driven flow in a rectangular duct, as already given in the previous section,
$w_P(x,y)$ is a pressure-driven flow in a rectangular duct, as already given in the previous section,
 \begin{equation} w_P(x,y) = w_{P,0}(x,y) + \hat{w}_{P}(x,y), \end{equation}
\begin{equation} w_P(x,y) = w_{P,0}(x,y) + \hat{w}_{P}(x,y), \end{equation}
with  $\hat {w}_P(x,y)\equiv {\rm Im}[g(z;c)]$. This decomposition is illustrated in figure 10(a).
$\hat {w}_P(x,y)\equiv {\rm Im}[g(z;c)]$. This decomposition is illustrated in figure 10(a).

Figure 10. (a) Periodic channel flow  $w(x,y)$ and its decomposition
$w(x,y)$ and its decomposition  $w_P(x,y)$ and
$w_P(x,y)$ and  $\hat {w}(x,y)$. (b) Conformal mapping from the upper left domain
$\hat {w}(x,y)$. (b) Conformal mapping from the upper left domain  $D_\zeta ^{-+}$ to the half-period window of
$D_\zeta ^{-+}$ to the half-period window of  $D$.
$D$.
Now consider the function  $\hat {w}(x,y)$ that is harmonic in the half-period window
$\hat {w}(x,y)$ that is harmonic in the half-period window  $D_{half}$. The function
$D_{half}$. The function  $\hat {w}(x,y)$ satisfies
$\hat {w}(x,y)$ satisfies
 $$\begin{gather} \hat{w}(0,y) = 0,\quad 0\leq y \leq 1, \end{gather}$$
$$\begin{gather} \hat{w}(0,y) = 0,\quad 0\leq y \leq 1, \end{gather}$$ $$\begin{gather}\hat{w}(x,0)=\hat{w}(x,1+c) = 0,\quad 0\leq x \leq \epsilon/2, \end{gather}$$
$$\begin{gather}\hat{w}(x,0)=\hat{w}(x,1+c) = 0,\quad 0\leq x \leq \epsilon/2, \end{gather}$$ $$\begin{gather}\frac{\partial \hat{w}}{\partial x}(\epsilon/2,y) = 0,\quad 0\leq y \leq 1+c, \end{gather}$$
$$\begin{gather}\frac{\partial \hat{w}}{\partial x}(\epsilon/2,y) = 0,\quad 0\leq y \leq 1+c, \end{gather}$$
where the last condition comes from the periodicity of the channel. Because of the symmetry condition (2.10),  $\hat {w}(x,y)$ should satisfy
$\hat {w}(x,y)$ should satisfy
 \begin{align} \frac{\partial w}{\partial x}(0,y)&=\frac{\partial \hat{w}}{\partial x}(0,y) + \frac{\partial w_P}{\partial x} (0,y)\nonumber\\ &=\frac{\partial \hat{w}}{\partial x}(0,y)+\frac{\partial \hat{w}_P}{\partial x} (0,y)+\frac{\epsilon}{2}=0,\quad 1\leq y \leq 1+c. \end{align}
\begin{align} \frac{\partial w}{\partial x}(0,y)&=\frac{\partial \hat{w}}{\partial x}(0,y) + \frac{\partial w_P}{\partial x} (0,y)\nonumber\\ &=\frac{\partial \hat{w}}{\partial x}(0,y)+\frac{\partial \hat{w}_P}{\partial x} (0,y)+\frac{\epsilon}{2}=0,\quad 1\leq y \leq 1+c. \end{align}
Because  $\hat {w}(x,y)$ is a harmonic function in
$\hat {w}(x,y)$ is a harmonic function in  $D_{half}$, it is convenient to define
$D_{half}$, it is convenient to define  $h(z) \equiv \chi + {\rm i} \hat {w}$, where
$h(z) \equiv \chi + {\rm i} \hat {w}$, where  $\chi$ is a harmonic conjugate of
$\chi$ is a harmonic conjugate of  $\hat {w}$. From (6.5) and use of the Cauchy–Riemann equations.
$\hat {w}$. From (6.5) and use of the Cauchy–Riemann equations.
 \begin{equation} \frac{\partial \hat{w}}{\partial x}(\epsilon/2,y) =-\frac{\partial \chi}{\partial y}(\epsilon/2,y) = 0,\quad 0\leq y\leq 1+c. \end{equation}
\begin{equation} \frac{\partial \hat{w}}{\partial x}(\epsilon/2,y) =-\frac{\partial \chi}{\partial y}(\epsilon/2,y) = 0,\quad 0\leq y\leq 1+c. \end{equation}
This means that  $\chi (\epsilon /2,y)$ is constant on
$\chi (\epsilon /2,y)$ is constant on  $0\leq y \leq 1+c$, so it is convenient to set
$0\leq y \leq 1+c$, so it is convenient to set  $\chi (\epsilon /2,y)=0$ for
$\chi (\epsilon /2,y)=0$ for  $0\leq y \leq 1+c$, without loss of generality. In addition, the condition (6.6) and use of the Cauchy–Riemann equations again give
$0\leq y \leq 1+c$, without loss of generality. In addition, the condition (6.6) and use of the Cauchy–Riemann equations again give
 \begin{equation} \frac{\partial \chi}{\partial y}(0,y) =-\frac{\partial \hat{w}}{\partial x}(0,y) = \frac{\partial \hat{w}_P}{\partial x}(0,y) +\frac{\epsilon}{2}=-\frac{\partial \chi_P}{\partial y}(0,y) + \frac{\epsilon}{2}, \quad 1\leq y \leq 1+c,\end{equation}
\begin{equation} \frac{\partial \chi}{\partial y}(0,y) =-\frac{\partial \hat{w}}{\partial x}(0,y) = \frac{\partial \hat{w}_P}{\partial x}(0,y) +\frac{\epsilon}{2}=-\frac{\partial \chi_P}{\partial y}(0,y) + \frac{\epsilon}{2}, \quad 1\leq y \leq 1+c,\end{equation}
where  $\chi _P(x,y)\equiv {\rm Re}[g(z;c)]$. Integrating (6.8) from
$\chi _P(x,y)\equiv {\rm Re}[g(z;c)]$. Integrating (6.8) from  $1$ to
$1$ to  $y$ gives
$y$ gives
 \begin{align} \chi(0,y) - \chi_0 &=-(\chi_P(0,y)-\chi_P(0,1))+\frac{\epsilon}{2}\,(y-1) \nonumber\\ &=-{\rm Re}[g({\rm i} y;c)-g({\rm i};c)] + \frac{\epsilon}{2}\,(y-1), \quad \chi_0\equiv \chi(0,1)\in\mathbb{R}. \end{align}
\begin{align} \chi(0,y) - \chi_0 &=-(\chi_P(0,y)-\chi_P(0,1))+\frac{\epsilon}{2}\,(y-1) \nonumber\\ &=-{\rm Re}[g({\rm i} y;c)-g({\rm i};c)] + \frac{\epsilon}{2}\,(y-1), \quad \chi_0\equiv \chi(0,1)\in\mathbb{R}. \end{align} Now we introduce the conformal mapping to the half-period window  $D_{half}$ in the
$D_{half}$ in the  $z$-plane from
$z$-plane from  $D_\zeta ^{-+}$, which is defined by the upper left unit quarter-disc outside an inner small circle
$D_\zeta ^{-+}$, which is defined by the upper left unit quarter-disc outside an inner small circle  $C_1$ in the complex
$C_1$ in the complex  $\zeta$-plane. This map is defined by
$\zeta$-plane. This map is defined by
 \begin{equation} z = {\mathcal{Z}}(\zeta) \equiv-\frac{1+c}{\rm \pi}\log \left(\frac{\omega(\zeta,\theta_1(\infty))}{\omega(\zeta,\theta_2(\infty))}\right) + (1+c){\rm i}, \end{equation}
\begin{equation} z = {\mathcal{Z}}(\zeta) \equiv-\frac{1+c}{\rm \pi}\log \left(\frac{\omega(\zeta,\theta_1(\infty))}{\omega(\zeta,\theta_2(\infty))}\right) + (1+c){\rm i}, \end{equation}where
 \begin{equation} \theta_1(\zeta) \equiv \delta + \frac{q^2}{1-\overline{\delta}\zeta},\quad \theta_2(\zeta)\equiv-\delta + \frac{q^2}{1+\overline{\delta}\zeta}. \end{equation}
\begin{equation} \theta_1(\zeta) \equiv \delta + \frac{q^2}{1-\overline{\delta}\zeta},\quad \theta_2(\zeta)\equiv-\delta + \frac{q^2}{1+\overline{\delta}\zeta}. \end{equation}
The function  ${\mathcal {Z}}(\zeta )$ maps the negative real axis to
${\mathcal {Z}}(\zeta )$ maps the negative real axis to  $\{(x,y)\,|\,x=0,\ 0\leq y \leq 1\}$, the upper left circle
$\{(x,y)\,|\,x=0,\ 0\leq y \leq 1\}$, the upper left circle  $C_0^{-+}$ to the gap
$C_0^{-+}$ to the gap  $\{(x,y)\,|\,x=0,\ 1\leq y \leq 1+c\}$, and the left-hand side of the inner circle
$\{(x,y)\,|\,x=0,\ 1\leq y \leq 1+c\}$, and the left-hand side of the inner circle  $C_1^-$ to
$C_1^-$ to  $\{(x,y)\,|\,x=\epsilon /2,\ 0\leq y \leq 1+c\}$, respectively. The map is visualized in figure 10(b). The same map was used to solve flows through a channel involving superhydrophobic surfaces with invaded grooves (Miyoshi et al. Reference Miyoshi, Rodriguez-Broadbent, Curran and Crowdy2022).
$\{(x,y)\,|\,x=\epsilon /2,\ 0\leq y \leq 1+c\}$, respectively. The map is visualized in figure 10(b). The same map was used to solve flows through a channel involving superhydrophobic surfaces with invaded grooves (Miyoshi et al. Reference Miyoshi, Rodriguez-Broadbent, Curran and Crowdy2022).
It is convenient to define  ${\mathcal {H}}(\zeta ) \equiv h({\mathcal {Z}}(\zeta ))$. The boundary condition (6.9) becomes
${\mathcal {H}}(\zeta ) \equiv h({\mathcal {Z}}(\zeta ))$. The boundary condition (6.9) becomes
 \begin{equation} {\rm Re}[{\mathcal{H}}(\zeta)] =-{\rm Re}[g({\mathcal{Z}}(\zeta);c)-g({\rm i};c)] + \frac{\epsilon}{2}\,({\rm Im}[{\mathcal{Z}}(\zeta)]-1) + \chi_0,\quad \zeta \in C_0^{-+}. \end{equation}
\begin{equation} {\rm Re}[{\mathcal{H}}(\zeta)] =-{\rm Re}[g({\mathcal{Z}}(\zeta);c)-g({\rm i};c)] + \frac{\epsilon}{2}\,({\rm Im}[{\mathcal{Z}}(\zeta)]-1) + \chi_0,\quad \zeta \in C_0^{-+}. \end{equation}
On the imaginary axis of the domain  $D_\zeta ^{-+}$,
$D_\zeta ^{-+}$,  $\hat {w}(x,y)=0$ from (6.4), which means that
$\hat {w}(x,y)=0$ from (6.4), which means that
 \begin{equation} {\rm Im}[{\mathcal{H}}(\zeta)] = \frac{1}{2{\rm i}}\,({\mathcal{H}}(\zeta) - \overline{{\mathcal{H}}(\zeta)}) = \frac{1}{2{\rm i}}\,({\mathcal{H}}(\zeta) - \overline{{\mathcal{H}}}(-\zeta)) = 0, \end{equation}
\begin{equation} {\rm Im}[{\mathcal{H}}(\zeta)] = \frac{1}{2{\rm i}}\,({\mathcal{H}}(\zeta) - \overline{{\mathcal{H}}(\zeta)}) = \frac{1}{2{\rm i}}\,({\mathcal{H}}(\zeta) - \overline{{\mathcal{H}}}(-\zeta)) = 0, \end{equation}
where we have used the fact that  $\overline {\zeta } = -\zeta$ on the imaginary axis. By the Schwarz reflection principle, the function
$\overline {\zeta } = -\zeta$ on the imaginary axis. By the Schwarz reflection principle, the function  ${\mathcal {H}}(\zeta )$ can be analytically continued to the right-hand half-disc outside
${\mathcal {H}}(\zeta )$ can be analytically continued to the right-hand half-disc outside  $C_1$ defined by
$C_1$ defined by  $D_\zeta ^{++}$, and satisfies
$D_\zeta ^{++}$, and satisfies
 \begin{equation} {\mathcal{H}}(\zeta) =
\overline{{\mathcal{H}}(-\overline{\zeta})} =
\overline{{\mathcal{H}}}(-\zeta),\quad \zeta \in D_\zeta^{++}.
\end{equation}
\begin{equation} {\mathcal{H}}(\zeta) =
\overline{{\mathcal{H}}(-\overline{\zeta})} =
\overline{{\mathcal{H}}}(-\zeta),\quad \zeta \in D_\zeta^{++}.
\end{equation}
Using the fact that  $\chi =0$ on
$\chi =0$ on  $0\leq y\leq 1+c$ because of (6.7), which means
$0\leq y\leq 1+c$ because of (6.7), which means  ${\rm Re}[{\mathcal {H}}(\zeta )]=0$ on
${\rm Re}[{\mathcal {H}}(\zeta )]=0$ on  $\zeta \in C_1$,
$\zeta \in C_1$,  ${\rm Re}[\zeta ]<0$, we have
${\rm Re}[\zeta ]<0$, we have
 \begin{equation} {\rm Re}[{\mathcal{H}}(\zeta)] ={\rm Re}[\overline{{\mathcal{H}}(\zeta)}]= {\rm Re}[{\mathcal{H}}(-\overline{\zeta})]=0,\quad \zeta \in C_1,\ {\rm Re}[\zeta] > 0. \end{equation}
\begin{equation} {\rm Re}[{\mathcal{H}}(\zeta)] ={\rm Re}[\overline{{\mathcal{H}}(\zeta)}]= {\rm Re}[{\mathcal{H}}(-\overline{\zeta})]=0,\quad \zeta \in C_1,\ {\rm Re}[\zeta] > 0. \end{equation} On the negative real axis of the domain  $D_\zeta ^{-+}$,
$D_\zeta ^{-+}$,  ${\rm Im}[{\mathcal {H}}(\zeta )]=0$ from (6.3). On the positive real axis of
${\rm Im}[{\mathcal {H}}(\zeta )]=0$ from (6.3). On the positive real axis of  $D_\zeta ^{++}$, the use of (6.14) and (6.3) gives
$D_\zeta ^{++}$, the use of (6.14) and (6.3) gives
 \begin{equation} {\rm Im}[{\mathcal{H}}(\zeta)] = {\rm Im}[\overline{{\mathcal{H}}(-\overline{\zeta})}] =-{\rm Im}[{\mathcal{H}}(-\overline{\zeta})] =-{\rm Im}[{\mathcal{H}}(-\zeta)] = 0, \end{equation}
\begin{equation} {\rm Im}[{\mathcal{H}}(\zeta)] = {\rm Im}[\overline{{\mathcal{H}}(-\overline{\zeta})}] =-{\rm Im}[{\mathcal{H}}(-\overline{\zeta})] =-{\rm Im}[{\mathcal{H}}(-\zeta)] = 0, \end{equation}
where we have used the fact that  $\overline {\zeta }=\zeta$ on the real axis. Hence
$\overline {\zeta }=\zeta$ on the real axis. Hence  ${\rm Im}[{\mathcal {H}}(\zeta )]=0$ on the real axis of
${\rm Im}[{\mathcal {H}}(\zeta )]=0$ on the real axis of  $D_\zeta ^{++}\cup D_\zeta ^{-+}$. By the Schwarz reflection principle again, the function
$D_\zeta ^{++}\cup D_\zeta ^{-+}$. By the Schwarz reflection principle again, the function  ${\mathcal {H}}(\zeta )$ can be continued to the lower half-disc outside the inner circle
${\mathcal {H}}(\zeta )$ can be continued to the lower half-disc outside the inner circle  $C_2$, which is the reflection of
$C_2$, which is the reflection of  $C_1$ in the real axis. The lower half-disc outside
$C_1$ in the real axis. The lower half-disc outside  $C_2$ is defined by
$C_2$ is defined by  $D_\zeta ^-\equiv D_\zeta ^{+-}\cup D_\zeta ^{--}$. The function
$D_\zeta ^-\equiv D_\zeta ^{+-}\cup D_\zeta ^{--}$. The function  ${\mathcal {H}}(\zeta )$ then satisfies
${\mathcal {H}}(\zeta )$ then satisfies
 \begin{equation} {\mathcal{H}}(\zeta) =\overline{{\mathcal{H}}(\overline{\zeta})} = \overline{{\mathcal{H}}}(\zeta),\quad \zeta \in D_\zeta^-. \end{equation}
\begin{equation} {\mathcal{H}}(\zeta) =\overline{{\mathcal{H}}(\overline{\zeta})} = \overline{{\mathcal{H}}}(\zeta),\quad \zeta \in D_\zeta^-. \end{equation}
Thus, the function  ${\mathcal {H}}(\zeta )$ is analytically continued to the whole unit disc outside
${\mathcal {H}}(\zeta )$ is analytically continued to the whole unit disc outside  $C_1$ and
$C_1$ and  $C_2$, and satisfies the boundary conditions
$C_2$, and satisfies the boundary conditions
 \begin{equation} {\rm Re}[{\mathcal{H}}(\zeta)] =\left\{\begin{array}{@{}ll} \phi(\zeta), & \zeta \in C_0,\\[2pt] 0, & \zeta \in C_1,C_2,\\ \end{array}\right. \end{equation}
\begin{equation} {\rm Re}[{\mathcal{H}}(\zeta)] =\left\{\begin{array}{@{}ll} \phi(\zeta), & \zeta \in C_0,\\[2pt] 0, & \zeta \in C_1,C_2,\\ \end{array}\right. \end{equation}where
 \begin{equation} \phi(\zeta) = \left\{\begin{array}{@{}ll} -{\rm Re}[g({\mathcal{Z}}(-\zeta);c) - g({\rm i};c)] & \\ \quad +\ \dfrac{\epsilon}{2}\,({\rm Im}[{\mathcal{Z}}(-\zeta)]-1) + \chi_0, & \zeta \in C_0^{++},C_0^{+-},\\ - {\rm Re}[g({\mathcal{Z}}(\zeta);c) - g({\rm i};c)] & \\ \quad +\ \dfrac{\epsilon}{2}\,({\rm Im}[{\mathcal{Z}}(\zeta)]-1) + \chi_0, & \zeta \in C_0^{-+},C_0^{--}, \end{array}\right. \end{equation}
\begin{equation} \phi(\zeta) = \left\{\begin{array}{@{}ll} -{\rm Re}[g({\mathcal{Z}}(-\zeta);c) - g({\rm i};c)] & \\ \quad +\ \dfrac{\epsilon}{2}\,({\rm Im}[{\mathcal{Z}}(-\zeta)]-1) + \chi_0, & \zeta \in C_0^{++},C_0^{+-},\\ - {\rm Re}[g({\mathcal{Z}}(\zeta);c) - g({\rm i};c)] & \\ \quad +\ \dfrac{\epsilon}{2}\,({\rm Im}[{\mathcal{Z}}(\zeta)]-1) + \chi_0, & \zeta \in C_0^{-+},C_0^{--}, \end{array}\right. \end{equation}
where the property  ${\mathcal {Z}}(\overline {\zeta }) = {\mathcal {Z}}(\zeta )$ for
${\mathcal {Z}}(\overline {\zeta }) = {\mathcal {Z}}(\zeta )$ for  $\zeta \in C_0$ has been used. This boundary value problem can be solved by the standard Schwarz integral proposed by Crowdy (Reference Crowdy2020) (see also Crowdy Reference Crowdy2008) as follows:
$\zeta \in C_0$ has been used. This boundary value problem can be solved by the standard Schwarz integral proposed by Crowdy (Reference Crowdy2020) (see also Crowdy Reference Crowdy2008) as follows:
 \begin{equation} {\mathcal{H}}(\zeta) = \frac{1}{2{\rm \pi} {\rm i}}\oint_{C_0}\phi(\zeta')\,[{\rm d}\log \omega(\zeta',\zeta) + {\rm d}\log \overline{\omega}(\overline{\zeta'},1/\zeta) ] +{\rm i} \hat{c}_0,\quad \hat{c}_0\in \mathbb{R}, \end{equation}
\begin{equation} {\mathcal{H}}(\zeta) = \frac{1}{2{\rm \pi} {\rm i}}\oint_{C_0}\phi(\zeta')\,[{\rm d}\log \omega(\zeta',\zeta) + {\rm d}\log \overline{\omega}(\overline{\zeta'},1/\zeta) ] +{\rm i} \hat{c}_0,\quad \hat{c}_0\in \mathbb{R}, \end{equation}
where  $\hat {c}_0$ is determined by the condition
$\hat {c}_0$ is determined by the condition  $w(0,0)=0$, and it has been confirmed numerically that
$w(0,0)=0$, and it has been confirmed numerically that  $\hat {c}_0=0$. The constant
$\hat {c}_0=0$. The constant  $\chi _0$ should be calculated beforehand, and it is easily obtained by the single-valuedness condition on
$\chi _0$ should be calculated beforehand, and it is easily obtained by the single-valuedness condition on  ${\mathcal {H}}(\zeta )$ around
${\mathcal {H}}(\zeta )$ around  $C_1$ and
$C_1$ and  $C_2$ (Crowdy Reference Crowdy2020). By combining (6.1) with (6.20), expression (3.6) is obtained.
$C_2$ (Crowdy Reference Crowdy2020). By combining (6.1) with (6.20), expression (3.6) is obtained.
The general theory of the prime function can be found in Crowdy (Reference Crowdy2020). It is an important special function that can be associated with any multiply connected circular domain. To evaluate (6.20), it is necessary to be able to evaluate the prime function  $\omega ({\cdot },{\cdot })$. Appendix A explains how to evaluate the function in detail.
$\omega ({\cdot },{\cdot })$. Appendix A explains how to evaluate the function in detail.
One of the advantages of using our method is the elimination of square root singularities at the apexes of the fins, namely, at  $x=0$ and
$x=0$ and  $y=1$. As detailed in § 6, the solution is obtained via the Schwarz integral of continuous boundary values, ensuring the absence of singularities along the integration path. Further insights into these singularities are provided in Miyoshi et al. (Reference Miyoshi, Rodriguez-Broadbent, Curran and Crowdy2022).
$y=1$. As detailed in § 6, the solution is obtained via the Schwarz integral of continuous boundary values, ensuring the absence of singularities along the integration path. Further insights into these singularities are provided in Miyoshi et al. (Reference Miyoshi, Rodriguez-Broadbent, Curran and Crowdy2022).
Finally, it should be mentioned that there is another approach to solving this boundary value problem that uses a doubly connected concentric annulus rather than a triply connected circular domain. That approach follows a formulation by Marshall (Reference Marshall2017), who found the solution for flow in a superhydrophobic channel with patterning on the upper and lower walls. Readers interested in a discussion of the relationship between these methods are referred to Miyoshi et al. (Reference Miyoshi, Rodriguez-Broadbent, Curran and Crowdy2022).
7. Derivation of asymptotic approximations for $f\,{Re}$

This section provides the derivations of asymptotic approximations for  $f\,{Re}$ when
$f\,{Re}$ when  $\epsilon \ll 1$, and for various assumptions on the clearance
$\epsilon \ll 1$, and for various assumptions on the clearance  $c$. We first consider the flow problem (2.7)–(2.10) in the geometric limit
$c$. We first consider the flow problem (2.7)–(2.10) in the geometric limit  $\epsilon \ll 1$ when
$\epsilon \ll 1$ when  $c=0$. Then for the finite clearance case, i.e.
$c=0$. Then for the finite clearance case, i.e.  $c>0$, three cases are considered: (1) the fin spacing is small compared to the fin height and clearance; (2) the clearance is small compared to the fin spacing, which is small compared to the fin height; (3) the same as case (2) but valid for larger ratios of clearance to fin spacing, i.e. up to ratios of unity.
$c>0$, three cases are considered: (1) the fin spacing is small compared to the fin height and clearance; (2) the clearance is small compared to the fin spacing, which is small compared to the fin height; (3) the same as case (2) but valid for larger ratios of clearance to fin spacing, i.e. up to ratios of unity.
Mathematically, we proceed by first considering the limit where the fin spacing is small in comparison to the fin height, i.e.  $\epsilon \ll 1$. Then we will consider the three distinct cases for different sizes of the tip clearance
$\epsilon \ll 1$. Then we will consider the three distinct cases for different sizes of the tip clearance  $c$. These cases are
$c$. These cases are  $c=0$ (no tip clearance),
$c=0$ (no tip clearance),  $c\gg \epsilon$ and
$c\gg \epsilon$ and  $c \lesssim \epsilon$.
$c \lesssim \epsilon$.
7.1. No clearance – case $\epsilon \ll 1$

When  $c=0$, a convenient approximation for the mean velocity for
$c=0$, a convenient approximation for the mean velocity for  $\epsilon \to 0$ can be derived directly from (3.9). Setting
$\epsilon \to 0$ can be derived directly from (3.9). Setting  $c=0$, (3.9) reduces to the solution (Shah & London Reference Shah and London1978)
$c=0$, (3.9) reduces to the solution (Shah & London Reference Shah and London1978)
 \begin{equation} w_{m} = \frac{\epsilon^2}{12} - \frac{16\epsilon^3}{{\rm \pi}^5}\sum_{n=1,3,\ldots}^\infty \frac{1}{n^5}\tanh\left(\frac{n{\rm \pi}}{2\epsilon}\right). \end{equation}
\begin{equation} w_{m} = \frac{\epsilon^2}{12} - \frac{16\epsilon^3}{{\rm \pi}^5}\sum_{n=1,3,\ldots}^\infty \frac{1}{n^5}\tanh\left(\frac{n{\rm \pi}}{2\epsilon}\right). \end{equation}
When  $\epsilon \to 0$,
$\epsilon \to 0$,  $\tanh (n{\rm \pi} /2\epsilon )=1-2\,{\rm e}^{-n{\rm \pi} /\epsilon }+2\,{\rm e}^{-2n{\rm \pi} /\epsilon }+O({\rm e}^{-3{\rm \pi} /\epsilon })$, so we have
$\tanh (n{\rm \pi} /2\epsilon )=1-2\,{\rm e}^{-n{\rm \pi} /\epsilon }+2\,{\rm e}^{-2n{\rm \pi} /\epsilon }+O({\rm e}^{-3{\rm \pi} /\epsilon })$, so we have
 \begin{align} w_{m} &\sim \frac{\epsilon^2}{12} - \frac{16\epsilon^3}{{\rm \pi}^5}\sum_{n={1,3,\ldots}}^\infty\frac{1}{n^5}\,(1-2\,{\rm e}^{-n{\rm \pi}/\epsilon} + 2\,{\rm e}^{-2n{\rm \pi}/\epsilon})+O(\epsilon^3 \,{\rm e}^{-3{\rm \pi}/\epsilon}) \end{align}
\begin{align} w_{m} &\sim \frac{\epsilon^2}{12} - \frac{16\epsilon^3}{{\rm \pi}^5}\sum_{n={1,3,\ldots}}^\infty\frac{1}{n^5}\,(1-2\,{\rm e}^{-n{\rm \pi}/\epsilon} + 2\,{\rm e}^{-2n{\rm \pi}/\epsilon})+O(\epsilon^3 \,{\rm e}^{-3{\rm \pi}/\epsilon}) \end{align} \begin{align} &\sim\frac{\epsilon^2}{12} - \frac{16\epsilon^3}{{\rm \pi}^5}\left(\frac{31}{32}\,\tilde{\zeta}(5)-2\,{\rm e}^{-{\rm \pi}/\epsilon}+2\,{\rm e}^{-2{\rm \pi}/\epsilon}\right) +O(\epsilon^3 \,{\rm e}^{-3{\rm \pi}/\epsilon}) \end{align}
\begin{align} &\sim\frac{\epsilon^2}{12} - \frac{16\epsilon^3}{{\rm \pi}^5}\left(\frac{31}{32}\,\tilde{\zeta}(5)-2\,{\rm e}^{-{\rm \pi}/\epsilon}+2\,{\rm e}^{-2{\rm \pi}/\epsilon}\right) +O(\epsilon^3 \,{\rm e}^{-3{\rm \pi}/\epsilon}) \end{align} \begin{align} &=\frac{\epsilon^2}{12}\left(1-\beta\epsilon+\dfrac{384\epsilon}{{\rm \pi}^5}\,({\rm e}^{-{\rm \pi}/\epsilon}-{\rm e}^{-2{\rm \pi}/\epsilon})\right)\nonumber\\ &\quad +O(\epsilon^3\,{\rm e}^{-3{\rm \pi}/\epsilon}),\quad \beta=\frac{186}{{\rm \pi}^5}\,\tilde{\zeta}(5) \equiv 0.6302\ldots, \end{align}
\begin{align} &=\frac{\epsilon^2}{12}\left(1-\beta\epsilon+\dfrac{384\epsilon}{{\rm \pi}^5}\,({\rm e}^{-{\rm \pi}/\epsilon}-{\rm e}^{-2{\rm \pi}/\epsilon})\right)\nonumber\\ &\quad +O(\epsilon^3\,{\rm e}^{-3{\rm \pi}/\epsilon}),\quad \beta=\frac{186}{{\rm \pi}^5}\,\tilde{\zeta}(5) \equiv 0.6302\ldots, \end{align}
as  $\epsilon \rightarrow 0$, and
$\epsilon \rightarrow 0$, and  $\tilde {\zeta }(5)$ is the Riemann zeta function evaluated at 5. Thus we can arrive at the asymptotic formula for
$\tilde {\zeta }(5)$ is the Riemann zeta function evaluated at 5. Thus we can arrive at the asymptotic formula for  $f\,{Re}$ when
$f\,{Re}$ when  $c=0$, which is given by (3.4). The consideration of three terms in the expansion of
$c=0$, which is given by (3.4). The consideration of three terms in the expansion of  ${\rm tanh}(n{\rm \pi} /2\epsilon )$ was chosen to give the right balance between accuracy over the range
${\rm tanh}(n{\rm \pi} /2\epsilon )$ was chosen to give the right balance between accuracy over the range  $0\leq \epsilon \leq 1$, and the complexity of the formula.
$0\leq \epsilon \leq 1$, and the complexity of the formula.
7.2. Finite clearance – case (1): $\epsilon \ll c$, $\epsilon \ll 1$


For this case, we construct a solution directly using matched asymptotic expansions. It is convenient to rescale the  $x$ coordinate by defining
$x$ coordinate by defining  $X=x/\epsilon$, so that the problem domain is independent of
$X=x/\epsilon$, so that the problem domain is independent of  $\epsilon$. Then (2.7)–(2.10) become
$\epsilon$. Then (2.7)–(2.10) become
 $$\begin{gather} \frac{1}{\epsilon^2}\,\frac{\partial^2 w}{\partial X^2} + \frac{\partial^2 w}{\partial y^2} =-1 \quad \text{in } D_w=\{0< X<1, 0< y<1+c\}, \end{gather}$$
$$\begin{gather} \frac{1}{\epsilon^2}\,\frac{\partial^2 w}{\partial X^2} + \frac{\partial^2 w}{\partial y^2} =-1 \quad \text{in } D_w=\{0< X<1, 0< y<1+c\}, \end{gather}$$ $$\begin{gather}w = 0 \quad \text{on } y=0,\ 1 + c, \end{gather}$$
$$\begin{gather}w = 0 \quad \text{on } y=0,\ 1 + c, \end{gather}$$ $$\begin{gather}w = 0 \quad \text{on } X=0,1,\ 0< y < 1, \end{gather}$$
$$\begin{gather}w = 0 \quad \text{on } X=0,1,\ 0< y < 1, \end{gather}$$ $$\begin{gather}\frac{\partial w}{\partial X} = 0 \quad \text{on } X = 0,1,\ 1< y < 1+c. \end{gather}$$
$$\begin{gather}\frac{\partial w}{\partial X} = 0 \quad \text{on } X = 0,1,\ 1< y < 1+c. \end{gather}$$
Considering now  $\epsilon \to 0$, the asymptotic solution takes a different form depending on the region in the domain. Employing matched asymptotic expansions, we decompose the domain into a gap region (
$\epsilon \to 0$, the asymptotic solution takes a different form depending on the region in the domain. Employing matched asymptotic expansions, we decompose the domain into a gap region ( $1 < y < 1 + c$) above the fins, a fin region (
$1 < y < 1 + c$) above the fins, a fin region ( $0 < y < 1$) between the fins, and a short ‘tip region’ near the fin tips (
$0 < y < 1$) between the fins, and a short ‘tip region’ near the fin tips ( $y - 1 = O(\epsilon )$) that transitions between them. See figure 11 for a schematic of this domain decomposition. The boundaries between these regions will be handled carefully in the following subsections.
$y - 1 = O(\epsilon )$) that transitions between them. See figure 11 for a schematic of this domain decomposition. The boundaries between these regions will be handled carefully in the following subsections.

Figure 11. Asymptotic structure of the domain showing the gap, tip and fin regions, and the behaviour of the velocity in each region (the region close to the base,  $y=O(\epsilon )$, is not considered here).
$y=O(\epsilon )$, is not considered here).
7.2.1. Gap region: $1 < y < 1 + c$

First, we consider a regular expansion in powers of  $\epsilon$,
$\epsilon$,
 \begin{equation} w(X,y) = w_0 + \epsilon w_1 + \epsilon^2 w_2 + O(\epsilon^3),\quad \epsilon \to 0, \end{equation}
\begin{equation} w(X,y) = w_0 + \epsilon w_1 + \epsilon^2 w_2 + O(\epsilon^3),\quad \epsilon \to 0, \end{equation}
which, when substituted into (7.5), gives  $w_0 = A_0(y)\,X + B_0(y)$ at leading order in
$w_0 = A_0(y)\,X + B_0(y)$ at leading order in  $\epsilon$, i.e.
$\epsilon$, i.e.  $O(\epsilon ^{-2})$. Applying the symmetry conditions (7.8) above the fins gives
$O(\epsilon ^{-2})$. Applying the symmetry conditions (7.8) above the fins gives  $A_0(y)\equiv 0$, i.e.
$A_0(y)\equiv 0$, i.e.  $w_0 = w_0(y)$. Considering (7.5) at
$w_0 = w_0(y)$. Considering (7.5) at  $O(\epsilon ^{-1})$, we similarly find
$O(\epsilon ^{-1})$, we similarly find  $w_1 = w_1(y)$. Hence the leading-order balance is at
$w_1 = w_1(y)$. Hence the leading-order balance is at  $O(1)$,
$O(1)$,
 \begin{equation} \frac{\partial^2 w_2}{\partial X^2} + \frac{\mathrm{d}^2 w_0}{\mathrm{d} y^2} =-1, \end{equation}
\begin{equation} \frac{\partial^2 w_2}{\partial X^2} + \frac{\mathrm{d}^2 w_0}{\mathrm{d} y^2} =-1, \end{equation}
which, integrating over  $0< X<1$ and applying the symmetry conditions
$0< X<1$ and applying the symmetry conditions  $\partial w_2 / \partial X = 0$ at
$\partial w_2 / \partial X = 0$ at  $X=0, 1$, yields
$X=0, 1$, yields
 \begin{equation} \frac{\mathrm{d}^2 w_0}{\mathrm{d} y^2} =-1. \end{equation}
\begin{equation} \frac{\mathrm{d}^2 w_0}{\mathrm{d} y^2} =-1. \end{equation}
Integrating and applying the no-slip condition on the shroud,  $y=1+c$, we arrive at
$y=1+c$, we arrive at
 \begin{equation} w_0(y) = \tfrac{1}{2}(1+c)^2 - \tfrac{1}{2}y^2 + a_0(y-1-c), \end{equation}
\begin{equation} w_0(y) = \tfrac{1}{2}(1+c)^2 - \tfrac{1}{2}y^2 + a_0(y-1-c), \end{equation}
where  $a_0$ is a constant to be determined.
$a_0$ is a constant to be determined.
This is a Poiseuille-flow-type solution with a parabolic variation in the  $y$ direction. Clearly, this
$y$ direction. Clearly, this  $w_0$ cannot satisfy the no-slip boundary conditions (7.7) on the fins, hence a different solution is sought close to the fins.
$w_0$ cannot satisfy the no-slip boundary conditions (7.7) on the fins, hence a different solution is sought close to the fins.
The correction  $w_1$ will also be of interest later, and (7.5) at
$w_1$ will also be of interest later, and (7.5) at  $O(\epsilon )$ is
$O(\epsilon )$ is
 \begin{equation} \frac{\partial^2 w_3}{\partial X^2} + \frac{\mathrm{d}^2 w_1}{\mathrm{d} y^2} = 0, \end{equation}
\begin{equation} \frac{\partial^2 w_3}{\partial X^2} + \frac{\mathrm{d}^2 w_1}{\mathrm{d} y^2} = 0, \end{equation}
which, integrated over  $X$ and applying symmetry conditions and (7.7) as at the previous order, yields
$X$ and applying symmetry conditions and (7.7) as at the previous order, yields
 \begin{equation} w_1(y) = a_1(y-1-c), \end{equation}
\begin{equation} w_1(y) = a_1(y-1-c), \end{equation}
for some constant  $a_1$. Both
$a_1$. Both  $a_0$ and
$a_0$ and  $a_1$ will be determined by asymptotic matching with solution(s) close to the fins.
$a_1$ will be determined by asymptotic matching with solution(s) close to the fins.
7.2.2. Fin region: $0 < y < 1$

Denoting the solution in this region by  $\tilde {w}$ and considering again a regular expansion (7.9), we find
$\tilde {w}$ and considering again a regular expansion (7.9), we find  $\tilde {w}_0 = \tilde {A}_0(y)\,X + \tilde {B}_0(y)$ at leading order. However, now applying the no-slip boundary conditions at
$\tilde {w}_0 = \tilde {A}_0(y)\,X + \tilde {B}_0(y)$ at leading order. However, now applying the no-slip boundary conditions at  $X=0$ and
$X=0$ and  $X=1$ results in
$X=1$ results in  $\tilde {w}_0\equiv 0$. Similarly, at the next order we find that
$\tilde {w}_0\equiv 0$. Similarly, at the next order we find that  $\tilde {w}_1\equiv 0$. Thus the first non-trivial order of (7.5) is at
$\tilde {w}_1\equiv 0$. Thus the first non-trivial order of (7.5) is at  $O(\epsilon ^0)$, as governed by
$O(\epsilon ^0)$, as governed by
 \begin{equation} \frac{\partial^2 \tilde{w}_2}{\partial X^2} =-1. \end{equation}
\begin{equation} \frac{\partial^2 \tilde{w}_2}{\partial X^2} =-1. \end{equation}
Integrating and applying the no-slip conditions  $\tilde {w}_2=0$ at
$\tilde {w}_2=0$ at  $X=0$ and
$X=0$ and  $1$ gives
$1$ gives
 \begin{equation} \tilde{w}_2 = \tfrac{1}{2}X(1-X). \end{equation}
\begin{equation} \tilde{w}_2 = \tfrac{1}{2}X(1-X). \end{equation}
This velocity in the fin region,  $\tilde {w} = \epsilon ^2 \tilde {w}_2(X) + \cdots$, is two orders smaller than the velocity in the gap region, which is not surprising given that the former is confined between two no-slip surfaces, and the latter is between the equivalent of ‘shear-free’ surfaces. Interestingly, the flow in both regions is parabolic, but with variations oriented perpendicularly to one another. The distance between no-slip surfaces in the fin region is of
$\tilde {w} = \epsilon ^2 \tilde {w}_2(X) + \cdots$, is two orders smaller than the velocity in the gap region, which is not surprising given that the former is confined between two no-slip surfaces, and the latter is between the equivalent of ‘shear-free’ surfaces. Interestingly, the flow in both regions is parabolic, but with variations oriented perpendicularly to one another. The distance between no-slip surfaces in the fin region is of  $O(\epsilon )$, and the distance in the gap region (from the shroud to the fin tips) is
$O(\epsilon )$, and the distance in the gap region (from the shroud to the fin tips) is  $c$, assumed
$c$, assumed  $O(1)$. The transition between the two solutions takes place in a region at the fin tips.
$O(1)$. The transition between the two solutions takes place in a region at the fin tips.
As a last remark, solution (7.16) does not satisfy the no-slip condition on the base  $y=0$, hence another region exists for
$y=0$, hence another region exists for  $y = O(\epsilon )$, where the flow will have variation in both the
$y = O(\epsilon )$, where the flow will have variation in both the  $X$ and
$X$ and  $y$ directions. However, the region is short, of height
$y$ directions. However, the region is short, of height  $O(\epsilon )$, and the velocity will be
$O(\epsilon )$, and the velocity will be  $O(\epsilon ^2)$ and therefore have negligible contribution to the average velocity, so we do not consider it here.
$O(\epsilon ^2)$ and therefore have negligible contribution to the average velocity, so we do not consider it here.
7.2.3. Tip region: $y - 1 = O(\epsilon )$

Near the fin tips, we expect the variation in  $y$ to be on the scale of the fin spacing; therefore we introduce the inner variable
$y$ to be on the scale of the fin spacing; therefore we introduce the inner variable  $Y = (y-1)/\epsilon$, which is
$Y = (y-1)/\epsilon$, which is  $O(1)$ in this region, where we denote the solution by
$O(1)$ in this region, where we denote the solution by  $w = W(X,Y)$. The domain in this tip region consists of an infinite strip
$w = W(X,Y)$. The domain in this tip region consists of an infinite strip  $D_{tip} = \{0< X<1,\ {-\infty }< Y<\infty \}$, where (7.5), (7.7) and (7.8) become
$D_{tip} = \{0< X<1,\ {-\infty }< Y<\infty \}$, where (7.5), (7.7) and (7.8) become
 $$\begin{gather} \nabla_{XY}^2 W =-\epsilon^2 \quad \text{in } D_{tip}, \end{gather}$$
$$\begin{gather} \nabla_{XY}^2 W =-\epsilon^2 \quad \text{in } D_{tip}, \end{gather}$$ $$\begin{gather}W = 0 \quad \text{on } X=0,1,\ Y < 0, \end{gather}$$
$$\begin{gather}W = 0 \quad \text{on } X=0,1,\ Y < 0, \end{gather}$$ $$\begin{gather}\frac{\partial W}{\partial X} = 0 \quad \text{on } X = 0,1,\ 0< Y, \end{gather}$$
$$\begin{gather}\frac{\partial W}{\partial X} = 0 \quad \text{on } X = 0,1,\ 0< Y, \end{gather}$$
along with matching conditions with the gap and fin regions as  $Y\to \pm \infty$, and
$Y\to \pm \infty$, and  $\nabla _{XY}^2 = \partial ^2/\partial X^2 + \partial ^2/\partial Y^2$. To match with the
$\nabla _{XY}^2 = \partial ^2/\partial X^2 + \partial ^2/\partial Y^2$. To match with the  $O(1)$ solution in the gap region, one estimates that
$O(1)$ solution in the gap region, one estimates that  $W=O(1)$, with the expansion
$W=O(1)$, with the expansion
 \begin{equation} W = W_0(X,Y) + \epsilon\,W_1(X,Y) + O(\epsilon^2), \end{equation}
\begin{equation} W = W_0(X,Y) + \epsilon\,W_1(X,Y) + O(\epsilon^2), \end{equation}and leading-order matching conditions
 $$\begin{gather} W_0 \to \tfrac{1}{2}[(1+c)^2-1] - a_0c\quad \text{as }Y \to \infty, \end{gather}$$
$$\begin{gather} W_0 \to \tfrac{1}{2}[(1+c)^2-1] - a_0c\quad \text{as }Y \to \infty, \end{gather}$$ $$\begin{gather}W_0 \to 0\quad \text{as }Y \to -\infty, \end{gather}$$
$$\begin{gather}W_0 \to 0\quad \text{as }Y \to -\infty, \end{gather}$$
where the  $Y \to -\infty$ condition is due to the fact that the solution must become
$Y \to -\infty$ condition is due to the fact that the solution must become  $O(\epsilon ^2)$ in the fin region. Also,
$O(\epsilon ^2)$ in the fin region. Also,  $W_0$ satisfies
$W_0$ satisfies  $\nabla _{XY}^2W_0 = 0$ and boundary conditions (7.18)–(7.19). The only solution to this problem for
$\nabla _{XY}^2W_0 = 0$ and boundary conditions (7.18)–(7.19). The only solution to this problem for  $W_0$ is a constant, and (7.21) and (7.22) imply that
$W_0$ is a constant, and (7.21) and (7.22) imply that  $W_0 \equiv 0$ with
$W_0 \equiv 0$ with  $a_0c = \frac {1}{2}[(1+c)^2-1]$. Hence
$a_0c = \frac {1}{2}[(1+c)^2-1]$. Hence  $w_0$ in the gap region is now fully determined, i.e.
$w_0$ in the gap region is now fully determined, i.e.
 \begin{equation} w_0 =-\tfrac{1}{2}(y-1)(y-1-c), \end{equation}
\begin{equation} w_0 =-\tfrac{1}{2}(y-1)(y-1-c), \end{equation}
and satisfies  $w_0 \to 0$ as
$w_0 \to 0$ as  $y\to 1$.
$y\to 1$.
Proceeding to  $O(\epsilon )$ in the tip region, the problem for
$O(\epsilon )$ in the tip region, the problem for  $W_1$ is
$W_1$ is
 $$\begin{gather} \nabla_{XY}^2 W_1 = 0 \quad \text{in } D_{tip}, \end{gather}$$
$$\begin{gather} \nabla_{XY}^2 W_1 = 0 \quad \text{in } D_{tip}, \end{gather}$$ $$\begin{gather}W_1 = 0 \quad \text{on } X=0,1,\ Y < 0, \end{gather}$$
$$\begin{gather}W_1 = 0 \quad \text{on } X=0,1,\ Y < 0, \end{gather}$$ $$\begin{gather}\frac{\partial W_1}{\partial X} = 0 \quad \text{on } X = 0,1,\ 0< Y, \end{gather}$$
$$\begin{gather}\frac{\partial W_1}{\partial X} = 0 \quad \text{on } X = 0,1,\ 0< Y, \end{gather}$$
with a condition on the shear rate as  $Y \to \infty$, which must match with that of the leading-order gap solution as
$Y \to \infty$, which must match with that of the leading-order gap solution as  $y \to 1^+$, thus
$y \to 1^+$, thus
 \begin{equation} W_1 \sim \tfrac{1}{2}cY \quad \text{as } Y \to \infty, \end{equation}
\begin{equation} W_1 \sim \tfrac{1}{2}cY \quad \text{as } Y \to \infty, \end{equation}and a decay condition, matching with the fin region,
 \begin{equation} W_1 \to 0 \quad \text{as } Y \to -\infty. \end{equation}
\begin{equation} W_1 \to 0 \quad \text{as } Y \to -\infty. \end{equation} This problem for  $W_1$ can be solved exactly using complex variable techniques (the full description is given in Appendix C), but the simplicity of the domain means that the analysis and solution are considerably more straightforward than in § 6, requiring no triply connected domain mappings. The solution is found to be
$W_1$ can be solved exactly using complex variable techniques (the full description is given in Appendix C), but the simplicity of the domain means that the analysis and solution are considerably more straightforward than in § 6, requiring no triply connected domain mappings. The solution is found to be
 \begin{equation} W_1 = \frac{c}{2{\rm \pi}}\log \left| \frac{\tan^{1/2}({\rm \pi} Z /2) + {\rm e}^{\mathrm{i}{\rm \pi}/4}}{\tan^{1/2}({\rm \pi} Z /2) - {\rm e}^{\mathrm{i}{\rm \pi}/4}} \right|,\quad \text{where } Z = X+ \mathrm{i}Y. \end{equation}
\begin{equation} W_1 = \frac{c}{2{\rm \pi}}\log \left| \frac{\tan^{1/2}({\rm \pi} Z /2) + {\rm e}^{\mathrm{i}{\rm \pi}/4}}{\tan^{1/2}({\rm \pi} Z /2) - {\rm e}^{\mathrm{i}{\rm \pi}/4}} \right|,\quad \text{where } Z = X+ \mathrm{i}Y. \end{equation}
Notably, the constant term that perturbs the shear behaviour as  $Y \to \infty$ follows from this solution, and it can be shown (Appendix C) that
$Y \to \infty$ follows from this solution, and it can be shown (Appendix C) that
 \begin{equation} W_1 \sim \frac{1}{2}\,c\left[ Y + \frac{\log 2}{\rm \pi} + O({\rm e}^{-{\rm \pi} Y}) \right] \quad \text{as } Y \to \infty. \end{equation}
\begin{equation} W_1 \sim \frac{1}{2}\,c\left[ Y + \frac{\log 2}{\rm \pi} + O({\rm e}^{-{\rm \pi} Y}) \right] \quad \text{as } Y \to \infty. \end{equation}
We note that Schnitzer & Yariv (Reference Schnitzer and Yariv2017) encountered an identical problem for  $W_1$ in their analysis, but extracted only the far-field behaviour (7.30) (absent the exponential error term). In contrast, we provide the solution throughout the tip region, (7.29).
$W_1$ in their analysis, but extracted only the far-field behaviour (7.30) (absent the exponential error term). In contrast, we provide the solution throughout the tip region, (7.29).
7.2.4. First-order correction in the gap region
The constant term in the  $Y\to \infty$ behaviour of
$Y\to \infty$ behaviour of  $W_1$ does not match with the leading-order solution (7.23) in the gap region, but instead gives a condition on the
$W_1$ does not match with the leading-order solution (7.23) in the gap region, but instead gives a condition on the  $O(\epsilon )$ correction. Matching
$O(\epsilon )$ correction. Matching  $w_1 \to -a_1 c$ as
$w_1 \to -a_1 c$ as  $y \to 1^+$ with the tip region solution gives that
$y \to 1^+$ with the tip region solution gives that  $-a_1 c = c\log 2 / (2{\rm \pi} )$, hence
$-a_1 c = c\log 2 / (2{\rm \pi} )$, hence
 \begin{equation} w_1 =-\frac{\log 2}{2{\rm \pi}}\,(y - 1 - c). \end{equation}
\begin{equation} w_1 =-\frac{\log 2}{2{\rm \pi}}\,(y - 1 - c). \end{equation}Combining the leading order and correction in the gap region,
 \begin{equation} w = w_0 + \epsilon w_1 + \cdots =-\frac{1}{2}\,(y-1-c)\left(y-1+\frac{\epsilon\log 2}{\rm \pi}\right) + \cdots, \end{equation}
\begin{equation} w = w_0 + \epsilon w_1 + \cdots =-\frac{1}{2}\,(y-1-c)\left(y-1+\frac{\epsilon\log 2}{\rm \pi}\right) + \cdots, \end{equation}
which can be interpreted as a Navier slip velocity with slip length  $\beta = (\epsilon \log 2)/{\rm \pi}$. That is,
$\beta = (\epsilon \log 2)/{\rm \pi}$. That is,  $w^c = w_0 + \epsilon w_1$ satisfies the ‘effective Navier slip’ condition
$w^c = w_0 + \epsilon w_1$ satisfies the ‘effective Navier slip’ condition  $w^c = \beta \,\mathrm {d}w^c / \mathrm {d} y$ at
$w^c = \beta \,\mathrm {d}w^c / \mathrm {d} y$ at  $y=1$, with
$y=1$, with  $\beta$ incorporating the aggregate effect of the periodic fin array when they are closely spaced. The slip length
$\beta$ incorporating the aggregate effect of the periodic fin array when they are closely spaced. The slip length  $(\epsilon \log 2)/{\rm \pi}$ agrees with the result for shear flow over an array of blade-shaped longitudinal ribs when the ribs are infinitely tall (Bechert & Bartenwerfer Reference Bechert and Bartenwerfer1989).
$(\epsilon \log 2)/{\rm \pi}$ agrees with the result for shear flow over an array of blade-shaped longitudinal ribs when the ribs are infinitely tall (Bechert & Bartenwerfer Reference Bechert and Bartenwerfer1989).
7.2.5. Friction factor
Calculating the mean velocity  $w_{m}$ from the asymptotic solution, the contributions from the tip region (velocity of
$w_{m}$ from the asymptotic solution, the contributions from the tip region (velocity of  $O(\epsilon )$ over a region of area
$O(\epsilon )$ over a region of area  $O(\epsilon )$) and fin region (velocity of
$O(\epsilon )$) and fin region (velocity of  $O(\epsilon ^2)$ over a region of area
$O(\epsilon ^2)$ over a region of area  $O(1)$) are both
$O(1)$) are both  $O(\epsilon ^2)$, so
$O(\epsilon ^2)$, so  $w_{m}$ up to
$w_{m}$ up to  $O(\epsilon )$ can be calculated from the gap solution (7.23), (7.31), resulting in
$O(\epsilon )$ can be calculated from the gap solution (7.23), (7.31), resulting in
 \begin{align} w_{m} &= \frac{1}{1+c}\int_1^{1+c} [w_0(y) + \epsilon\,w_1(y)]\,\mathrm{d} y + O(\epsilon^2) \end{align}
\begin{align} w_{m} &= \frac{1}{1+c}\int_1^{1+c} [w_0(y) + \epsilon\,w_1(y)]\,\mathrm{d} y + O(\epsilon^2) \end{align} \begin{align} &= \frac{c^3}{12(1+c)}\left[1 + \frac{\epsilon \log 8}{{\rm \pi} c} \right]+ O(\epsilon^2). \end{align}
\begin{align} &= \frac{c^3}{12(1+c)}\left[1 + \frac{\epsilon \log 8}{{\rm \pi} c} \right]+ O(\epsilon^2). \end{align}
Then, substituting the above asymptotic expression for  $w_{m}$ into the definition (2.11) of the friction factor multiplied by
$w_{m}$ into the definition (2.11) of the friction factor multiplied by  ${Re}$, we find the expression (3.10). Note that (3.10) contains higher-order terms of
${Re}$, we find the expression (3.10). Note that (3.10) contains higher-order terms of  $O(\epsilon ^4)$, but little analytical gain is made by expanding it further in powers of
$O(\epsilon ^4)$, but little analytical gain is made by expanding it further in powers of  $\epsilon$ (and may in fact decrease accuracy), so we keep it in the current form.
$\epsilon$ (and may in fact decrease accuracy), so we keep it in the current form.
7.3. Small clearance – case (2): $c\ll \epsilon \ll 1$

Consider the limit where the fin spacing is small,  $\epsilon \ll 1$, and so is the clearance, which is even smaller than the spacing, thus
$\epsilon \ll 1$, and so is the clearance, which is even smaller than the spacing, thus  $c \ll \epsilon$. To do so, start from the harmonic
$c \ll \epsilon$. To do so, start from the harmonic  $\hat {w}$ problem in § 6. For
$\hat {w}$ problem in § 6. For  $c \ll \epsilon$, the part of the domain of interest is that between the tip of the fin and the shroud, where the boundary condition for
$c \ll \epsilon$, the part of the domain of interest is that between the tip of the fin and the shroud, where the boundary condition for  $\hat {w}$ is inhomogeneous. There are two such regions per period, and we need consider only one due to symmetry. Mathematically, this is a region of height and width
$\hat {w}$ is inhomogeneous. There are two such regions per period, and we need consider only one due to symmetry. Mathematically, this is a region of height and width  $O(c)$, centred on the shroud above the fin at
$O(c)$, centred on the shroud above the fin at  $x=0$, described by the scaled coordinates
$x=0$, described by the scaled coordinates  $(x,y) = (c\hat {X}, 1+c+c\hat {Y})$, where
$(x,y) = (c\hat {X}, 1+c+c\hat {Y})$, where  $\hat {X}, \hat {Y}=O(1)$ for
$\hat {X}, \hat {Y}=O(1)$ for  $c\ll 1$. The domain in this inner region takes the form of a quarter-plane, and the problem for
$c\ll 1$. The domain in this inner region takes the form of a quarter-plane, and the problem for  $\hat {w}$, denoted here by
$\hat {w}$, denoted here by  $\hat {W}(\hat {X}, \hat {Y}) = \hat {w}(x,y)$, is
$\hat {W}(\hat {X}, \hat {Y}) = \hat {w}(x,y)$, is
 $$\begin{gather} \hat{\nabla}^2 \hat{W} = 0 \quad \text{in } \hat{X}>0,\ \hat{Y}<0 \end{gather}$$
$$\begin{gather} \hat{\nabla}^2 \hat{W} = 0 \quad \text{in } \hat{X}>0,\ \hat{Y}<0 \end{gather}$$ $$\begin{gather}\hat{W} = 0 \quad \text{on } \hat{X}>0,\ \hat{Y} =0, \end{gather}$$
$$\begin{gather}\hat{W} = 0 \quad \text{on } \hat{X}>0,\ \hat{Y} =0, \end{gather}$$ $$\begin{gather}\hat{W} = 0 \quad \text{on } \hat{X}=0,\ \hat{Y} <-1, \end{gather}$$
$$\begin{gather}\hat{W} = 0 \quad \text{on } \hat{X}=0,\ \hat{Y} <-1, \end{gather}$$ $$\begin{gather}\frac{\partial \hat{W}}{\partial \hat{X}} =-\frac{\partial w_P}{\partial \hat{X}} \quad \text{on } \hat{X} = 0,\ -1< \hat{Y} < 0, \end{gather}$$
$$\begin{gather}\frac{\partial \hat{W}}{\partial \hat{X}} =-\frac{\partial w_P}{\partial \hat{X}} \quad \text{on } \hat{X} = 0,\ -1< \hat{Y} < 0, \end{gather}$$
where  $w_P(x,y)$ is the known solution for flow in a no-slip rectangular duct given in (6.2) (but must be written in the variables
$w_P(x,y)$ is the known solution for flow in a no-slip rectangular duct given in (6.2) (but must be written in the variables  $\hat {X}$ and
$\hat {X}$ and  $\hat {Y}$). It depends on both
$\hat {Y}$). It depends on both  $\epsilon$ and
$\epsilon$ and  $c$, so we expand it, assuming
$c$, so we expand it, assuming  $c\ll \epsilon \ll 1$. This is done in two stages: first taking
$c\ll \epsilon \ll 1$. This is done in two stages: first taking  $\epsilon \ll 1$ in
$\epsilon \ll 1$ in  $w_P$, and evaluating its derivative on the boundary
$w_P$, and evaluating its derivative on the boundary  $X=0$, within an
$X=0$, within an  $O(\epsilon )$ distance of the top shroud; then further expanding assuming
$O(\epsilon )$ distance of the top shroud; then further expanding assuming  $c/\epsilon \ll 1$.
$c/\epsilon \ll 1$.
Taking the limit  $\epsilon \ll 1$, we restrict to be within an
$\epsilon \ll 1$, we restrict to be within an  $O(\epsilon )$ distance from the top shroud, i.e.
$O(\epsilon )$ distance from the top shroud, i.e.  $(x,y) = (\epsilon X, 1 + c + \epsilon \tilde {Y})$. Then
$(x,y) = (\epsilon X, 1 + c + \epsilon \tilde {Y})$. Then
 \begin{equation} w_P \sim \frac{\epsilon^2}{2}\,X(1-X) - 4\epsilon^2 \sum_{n=1,3,\ldots}^\infty \frac{\mathrm{Im}[{\rm e}^{\mathrm{i}n{\rm \pi}(X+\mathrm{i}\tilde{Y})}]}{n^3{\rm \pi}^3} + O({\rm e}^{-{\rm \pi}/\epsilon}), \quad \epsilon \ll1. \end{equation}
\begin{equation} w_P \sim \frac{\epsilon^2}{2}\,X(1-X) - 4\epsilon^2 \sum_{n=1,3,\ldots}^\infty \frac{\mathrm{Im}[{\rm e}^{\mathrm{i}n{\rm \pi}(X+\mathrm{i}\tilde{Y})}]}{n^3{\rm \pi}^3} + O({\rm e}^{-{\rm \pi}/\epsilon}), \quad \epsilon \ll1. \end{equation}
The normal derivative on  $X=0$ then follows:
$X=0$ then follows:
 \begin{equation} \left.\frac{\partial w_P}{\partial X}\right|_{X=0} \sim \frac{\epsilon^2}{2} - 4\epsilon^2 \sum_{n=1,3,\ldots}^\infty \frac{{\rm e}^{-n{\rm \pi}\tilde{Y}}}{n^2{\rm \pi}^2} + O({\rm e}^{-{\rm \pi}/\epsilon}), \quad \epsilon \ll1. \end{equation}
\begin{equation} \left.\frac{\partial w_P}{\partial X}\right|_{X=0} \sim \frac{\epsilon^2}{2} - 4\epsilon^2 \sum_{n=1,3,\ldots}^\infty \frac{{\rm e}^{-n{\rm \pi}\tilde{Y}}}{n^2{\rm \pi}^2} + O({\rm e}^{-{\rm \pi}/\epsilon}), \quad \epsilon \ll1. \end{equation}
Before proceeding, it is useful to express the sum in terms of dilogarithm functions  $\mathrm {Li}_2(z)$:
$\mathrm {Li}_2(z)$:
 \begin{equation} \sum_{n=1,3,\ldots}^\infty \frac{{\rm e}^{-n{\rm \pi}\tilde{Y}}}{n^2{\rm \pi}^2} = \mathrm{Li}_2({\rm e}^{-{\rm \pi}\tilde{Y}}) - \frac{1}{4}\,\mathrm{Li}_2({\rm e}^{-2{\rm \pi}\tilde{Y}}). \end{equation}
\begin{equation} \sum_{n=1,3,\ldots}^\infty \frac{{\rm e}^{-n{\rm \pi}\tilde{Y}}}{n^2{\rm \pi}^2} = \mathrm{Li}_2({\rm e}^{-{\rm \pi}\tilde{Y}}) - \frac{1}{4}\,\mathrm{Li}_2({\rm e}^{-2{\rm \pi}\tilde{Y}}). \end{equation}
Changing to hat variables,  $(X, \tilde {Y}) = (c\hat {X}/\epsilon,c\hat {Y}/\epsilon )$, and now expanding for
$(X, \tilde {Y}) = (c\hat {X}/\epsilon,c\hat {Y}/\epsilon )$, and now expanding for  $c/\epsilon \ll 1$ (using the standard integral representation of
$c/\epsilon \ll 1$ (using the standard integral representation of  $\mathrm {Li}_2$), gives
$\mathrm {Li}_2$), gives
 \begin{equation} \left.\frac{\partial w_P}{\partial \hat{X}}\right|_{\hat{X}=0} \sim \frac{2c^2}{\rm \pi}\,\hat{Y}\left( \log\left(\frac{-{\rm \pi} c \hat{Y}}{2\epsilon}\right)-1\right) + O(c^3). \end{equation}
\begin{equation} \left.\frac{\partial w_P}{\partial \hat{X}}\right|_{\hat{X}=0} \sim \frac{2c^2}{\rm \pi}\,\hat{Y}\left( \log\left(\frac{-{\rm \pi} c \hat{Y}}{2\epsilon}\right)-1\right) + O(c^3). \end{equation}
With the boundary condition now known, to solve the problem for  $\hat {W}$, we convert to a complex variable problem for
$\hat {W}$, we convert to a complex variable problem for  $\hat {h}(\hat {Z}) = \hat {\chi } + \mathrm {i} \hat {W}$, where
$\hat {h}(\hat {Z}) = \hat {\chi } + \mathrm {i} \hat {W}$, where  $\hat {Z}=\hat {X} + \mathrm {i}\hat {Y}$. The Dirichlet conditions (7.36)–(7.37) give
$\hat {Z}=\hat {X} + \mathrm {i}\hat {Y}$. The Dirichlet conditions (7.36)–(7.37) give  $\mathrm {Im}[\hat {h}] = 0$. The condition on (7.38) converts to one on
$\mathrm {Im}[\hat {h}] = 0$. The condition on (7.38) converts to one on  $\partial \hat {\chi }/\partial \hat {Y}$ using Cauchy–Riemann equations, which can be integrated in
$\partial \hat {\chi }/\partial \hat {Y}$ using Cauchy–Riemann equations, which can be integrated in  $\hat {Y}$ (choosing
$\hat {Y}$ (choosing  $\hat {\chi }(0,0)=0$) to give
$\hat {\chi }(0,0)=0$) to give
 \begin{equation} \hat{\chi} = {\rm Re}[\hat{h}(\hat{Z})] = \frac{c^2}{\rm \pi}\,\hat{Y}^2 \left( \log\left(\frac{-{\rm \pi} c \hat{Y}}{2\epsilon}\right)-\frac{3}{2}\right) + O(c^3). \end{equation}
\begin{equation} \hat{\chi} = {\rm Re}[\hat{h}(\hat{Z})] = \frac{c^2}{\rm \pi}\,\hat{Y}^2 \left( \log\left(\frac{-{\rm \pi} c \hat{Y}}{2\epsilon}\right)-\frac{3}{2}\right) + O(c^3). \end{equation}
Since the  $\hat {Y}^2\log (-\hat {Y})$ dependence is difficult to handle, we can consider just the leading-order (which is
$\hat {Y}^2\log (-\hat {Y})$ dependence is difficult to handle, we can consider just the leading-order (which is  $O(c^2 \log c)$) behaviour in
$O(c^2 \log c)$) behaviour in  $c$, whereas the
$c$, whereas the  $\hat {Y}^2\log (-\hat {Y})$ behaviour appears at
$\hat {Y}^2\log (-\hat {Y})$ behaviour appears at  $O(c^2)$. That is,
$O(c^2)$. That is,
 \begin{align} \hat{\chi} = {\rm Re}[\hat{h}] &= \frac{c^2}{\rm \pi}\,\hat{Y}^2 \left( \log\left(\frac{{\rm \pi} c }{2\epsilon}\right)+ \log(-\hat{Y})-\frac{3}{2}\right) + O(c^3) \nonumber\\ &= \frac{c^2}{\rm \pi}\,\hat{Y}^2 \left( \log\left(\frac{{\rm \pi} c }{2\epsilon}\right)-\frac{3}{2}\right) + O(c^2) \nonumber\\ &=- A \hat{Y}^2 + O(c^2) \nonumber\\ &= A\hat{Z}^2 + O(c^2), \end{align}
\begin{align} \hat{\chi} = {\rm Re}[\hat{h}] &= \frac{c^2}{\rm \pi}\,\hat{Y}^2 \left( \log\left(\frac{{\rm \pi} c }{2\epsilon}\right)+ \log(-\hat{Y})-\frac{3}{2}\right) + O(c^3) \nonumber\\ &= \frac{c^2}{\rm \pi}\,\hat{Y}^2 \left( \log\left(\frac{{\rm \pi} c }{2\epsilon}\right)-\frac{3}{2}\right) + O(c^2) \nonumber\\ &=- A \hat{Y}^2 + O(c^2) \nonumber\\ &= A\hat{Z}^2 + O(c^2), \end{align}where
 \begin{equation} A = \frac{c^2}{\rm \pi} \left(\log\left(\frac{2\epsilon}{{\rm \pi} c }\right) + \frac{3}{2}\right), \end{equation}
\begin{equation} A = \frac{c^2}{\rm \pi} \left(\log\left(\frac{2\epsilon}{{\rm \pi} c }\right) + \frac{3}{2}\right), \end{equation}
and we have used  $\hat {Z}^2 = - \hat {Y}^2$ on
$\hat {Z}^2 = - \hat {Y}^2$ on  $\hat {X} = 0$. Also, we have included the
$\hat {X} = 0$. Also, we have included the  $3/2$ term (even though it is
$3/2$ term (even though it is  $O(c^2)$) since it is easy to do and appears to result in a slightly more accurate final formula.
$O(c^2)$) since it is easy to do and appears to result in a slightly more accurate final formula.
The domain in the  $\hat {Z}$-plane can be conformally mapped to the upper half unit disc via the sequence of maps
$\hat {Z}$-plane can be conformally mapped to the upper half unit disc via the sequence of maps
 \begin{equation} t = \frac{1}{\mathrm{i}\hat{Z}},\quad v = \mathrm{i}\sqrt{t^2-1}, \quad \xi = \frac{v-1}{v+1}, \end{equation}
\begin{equation} t = \frac{1}{\mathrm{i}\hat{Z}},\quad v = \mathrm{i}\sqrt{t^2-1}, \quad \xi = \frac{v-1}{v+1}, \end{equation}giving the composition
 \begin{equation} \xi =\varXi(\hat{Z})= \frac{\sqrt{\hat{Z}^2 + 1} - \hat{Z}}{\sqrt{\hat{Z}^2 + 1} + \hat{Z}}. \end{equation}
\begin{equation} \xi =\varXi(\hat{Z})= \frac{\sqrt{\hat{Z}^2 + 1} - \hat{Z}}{\sqrt{\hat{Z}^2 + 1} + \hat{Z}}. \end{equation}
The portions of the boundary where  $\mathrm {Im}[\hat {h}]=0$ map to the real
$\mathrm {Im}[\hat {h}]=0$ map to the real  $\xi$ axis,
$\xi$ axis,  $\xi \in [-1, 1]$, and the remaining portion maps to the upper unit circle. The conformal map
$\xi \in [-1, 1]$, and the remaining portion maps to the upper unit circle. The conformal map  $\xi =\varXi (\hat {Z})$ is illustrated in figure 12. Writing
$\xi =\varXi (\hat {Z})$ is illustrated in figure 12. Writing  $\hat {H}(\xi ) = \hat {h}(\hat {Z}(\xi ))$, we have that
$\hat {H}(\xi ) = \hat {h}(\hat {Z}(\xi ))$, we have that  $\hat {H}(\xi )$ is analytic in the upper semi-disc and satisfies
$\hat {H}(\xi )$ is analytic in the upper semi-disc and satisfies
 $$\begin{gather} \mathrm{Im}[\hat{H}(\xi)] = 0 \quad \text{for }\xi \in [-1,1], \end{gather}$$
$$\begin{gather} \mathrm{Im}[\hat{H}(\xi)] = 0 \quad \text{for }\xi \in [-1,1], \end{gather}$$ $$\begin{gather}{\rm Re}[\hat{H}(\xi)] = A\,[\hat{Z}(\xi)]^2 \quad \text{for }|\xi|=1, \mathrm{Im}[\xi]\geq 0. \end{gather}$$
$$\begin{gather}{\rm Re}[\hat{H}(\xi)] = A\,[\hat{Z}(\xi)]^2 \quad \text{for }|\xi|=1, \mathrm{Im}[\xi]\geq 0. \end{gather}$$
But from inverting the conformal map,  $[\hat {Z}(\xi )]^2 = (\xi + \xi ^{-1} - 2)/4$. The solution for
$[\hat {Z}(\xi )]^2 = (\xi + \xi ^{-1} - 2)/4$. The solution for  $\hat {H}$ is then easily found by inspection (since
$\hat {H}$ is then easily found by inspection (since  $\bar {\xi } = \xi ^{-1}$ on the unit circle) to be simply
$\bar {\xi } = \xi ^{-1}$ on the unit circle) to be simply
 \begin{equation} \hat{H}(\xi) = \frac{A}{2}\,(\xi - 1) =-\frac{A\hat{Z}}{\hat{Z} + \sqrt{\hat{Z}^2 + 1}}. \end{equation}
\begin{equation} \hat{H}(\xi) = \frac{A}{2}\,(\xi - 1) =-\frac{A\hat{Z}}{\hat{Z} + \sqrt{\hat{Z}^2 + 1}}. \end{equation}
Hence  $\hat {W} = \mathrm {Im}[\hat {H}]$ follows.
$\hat {W} = \mathrm {Im}[\hat {H}]$ follows.

Figure 12. Conformal mappings for solving for  $\hat {W}(\hat {X},\hat {Y})$ in case (2).
$\hat {W}(\hat {X},\hat {Y})$ in case (2).
Using the reciprocity theorem, the mean velocity of  $\hat {w}$ can be calculated as follows:
$\hat {w}$ can be calculated as follows:
 \begin{align} \int_{D} \hat{w}(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y &= 2\int_1^{1+c} \frac{\partial w_P}{\partial x}(0,y)\,\hat{w}(0,y)\,{\rm d} y \end{align}
\begin{align} \int_{D} \hat{w}(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y &= 2\int_1^{1+c} \frac{\partial w_P}{\partial x}(0,y)\,\hat{w}(0,y)\,{\rm d} y \end{align} \begin{align} &= 2\int_{-1}^{0} \left. \frac{\partial w_P}{\partial \hat{X}}\,\hat{W}\right|_{\hat{X}=0}{\rm d}\hat{Y} \end{align}
\begin{align} &= 2\int_{-1}^{0} \left. \frac{\partial w_P}{\partial \hat{X}}\,\hat{W}\right|_{\hat{X}=0}{\rm d}\hat{Y} \end{align} \begin{align} &\sim 2\int_{-1}^{0} (-2A\hat{Y} + O(c^2))(-A\hat{Y}\sqrt{1 - \hat{Y}^2} + O(c^2))\,{\rm d}\hat{Y} \end{align}
\begin{align} &\sim 2\int_{-1}^{0} (-2A\hat{Y} + O(c^2))(-A\hat{Y}\sqrt{1 - \hat{Y}^2} + O(c^2))\,{\rm d}\hat{Y} \end{align} \begin{align} &\sim 4A^2 \int_0^1 \hat{Y}^2\sqrt{1 - \hat{Y}^2}\,{\rm d}\hat{Y} + O(c^4\log (c/\epsilon)) \end{align}
\begin{align} &\sim 4A^2 \int_0^1 \hat{Y}^2\sqrt{1 - \hat{Y}^2}\,{\rm d}\hat{Y} + O(c^4\log (c/\epsilon)) \end{align} \begin{align} & \sim \frac{{\rm \pi} A^2}{4} + O(c^4\log (c/\epsilon)) . \end{align}
\begin{align} & \sim \frac{{\rm \pi} A^2}{4} + O(c^4\log (c/\epsilon)) . \end{align}This approximation can be used to give an approximation for the average velocity (3.9), given here by
 \begin{align} w_{m} &\sim \frac{\epsilon^2}{12} - \frac{1}{1+c}\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^3}{{\rm \pi}^5 n^5 }\tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right)+ \frac{{\rm \pi} A^2}{4\epsilon(1+c)}+O(\epsilon^{-1}c^4\log (c/\epsilon)) \nonumber\\ &\sim \frac{\epsilon^2}{12} - \frac{16\epsilon^3}{(1+c){\rm \pi}^5} \left(\frac{31}{32}\,\tilde{\zeta}(5) -2\,{\rm e}^{-{\rm \pi}(1+c)/\epsilon}+2\,{\rm e}^{-2{\rm \pi}(1+c)/\epsilon}+O({\rm e}^{-3{\rm \pi}/\epsilon}) \right) \nonumber\\ &\quad + \frac{{\rm \pi} A^2}{4\epsilon(1+c)}+O(\epsilon^{-1}c^4\log (c/\epsilon)), \quad \text{with }A = \frac{c^2}{\rm \pi} \left(\log\left(\frac{2\epsilon}{{\rm \pi} c }\right) + \frac{3}{2}\right), \end{align}
\begin{align} w_{m} &\sim \frac{\epsilon^2}{12} - \frac{1}{1+c}\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^3}{{\rm \pi}^5 n^5 }\tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right)+ \frac{{\rm \pi} A^2}{4\epsilon(1+c)}+O(\epsilon^{-1}c^4\log (c/\epsilon)) \nonumber\\ &\sim \frac{\epsilon^2}{12} - \frac{16\epsilon^3}{(1+c){\rm \pi}^5} \left(\frac{31}{32}\,\tilde{\zeta}(5) -2\,{\rm e}^{-{\rm \pi}(1+c)/\epsilon}+2\,{\rm e}^{-2{\rm \pi}(1+c)/\epsilon}+O({\rm e}^{-3{\rm \pi}/\epsilon}) \right) \nonumber\\ &\quad + \frac{{\rm \pi} A^2}{4\epsilon(1+c)}+O(\epsilon^{-1}c^4\log (c/\epsilon)), \quad \text{with }A = \frac{c^2}{\rm \pi} \left(\log\left(\frac{2\epsilon}{{\rm \pi} c }\right) + \frac{3}{2}\right), \end{align}
where from the first line to the second line we expanded the  $\tanh$ terms for
$\tanh$ terms for  $\epsilon \ll 1$, and kept up to
$\epsilon \ll 1$, and kept up to  ${\rm e}^{-2{\rm \pi} (1+c)/\epsilon }$ only. Thus the final expression for
${\rm e}^{-2{\rm \pi} (1+c)/\epsilon }$ only. Thus the final expression for  $w_{m}$ in (3.11) is obtained.
$w_{m}$ in (3.11) is obtained.
7.4. Finite clearance – case (3): $c\lesssim \epsilon \ll 1$

This case is similar to case (2), but it is shown numerically that the results are valid within a wider range of values of  $c$ and
$c$ and  $\epsilon$. In this limit, we formally consider the distinguished limit where
$\epsilon$. In this limit, we formally consider the distinguished limit where  $c=O(\epsilon )$. In this case, the flow
$c=O(\epsilon )$. In this case, the flow  $\hat {w}$ close to the top boundary (within a distance
$\hat {w}$ close to the top boundary (within a distance  $O(\epsilon )$) can be seen as a flow in a semi-infinite strip with mixed boundary conditions. As
$O(\epsilon )$) can be seen as a flow in a semi-infinite strip with mixed boundary conditions. As  $c=O(\epsilon )$, we may write
$c=O(\epsilon )$, we may write  $\tilde {c} = c/\epsilon =O(1)$ for
$\tilde {c} = c/\epsilon =O(1)$ for  $\epsilon \ll 1$.
$\epsilon \ll 1$.
Consider the region near the top boundary, transforming to
 \begin{equation} \tilde{X} \equiv \frac{x-\epsilon/2}{\epsilon},\quad \tilde{Y} \equiv \frac{y-(1+c)}{\epsilon},\quad \tilde{Z}\equiv \tilde{X} + {\rm i} \tilde{Y}, \end{equation}
\begin{equation} \tilde{X} \equiv \frac{x-\epsilon/2}{\epsilon},\quad \tilde{Y} \equiv \frac{y-(1+c)}{\epsilon},\quad \tilde{Z}\equiv \tilde{X} + {\rm i} \tilde{Y}, \end{equation}
and also define  $\tilde {W}(\tilde {X},\tilde {Y}) \equiv \hat {w}(x,y)$ and
$\tilde {W}(\tilde {X},\tilde {Y}) \equiv \hat {w}(x,y)$ and  $\tilde {g}(\tilde {Z})\equiv g(z;c)$. In this region, the function
$\tilde {g}(\tilde {Z})\equiv g(z;c)$. In this region, the function  $\tilde {W}(\tilde {X},\tilde {Y})$ satisfies
$\tilde {W}(\tilde {X},\tilde {Y})$ satisfies
 \begin{equation} \widetilde{\nabla}^2 \tilde{W}(\tilde{X},\tilde{Y}) = 0,\quad (\tilde{X},\tilde{Y}) \in \tilde{D}, \end{equation}
\begin{equation} \widetilde{\nabla}^2 \tilde{W}(\tilde{X},\tilde{Y}) = 0,\quad (\tilde{X},\tilde{Y}) \in \tilde{D}, \end{equation}
where the semi-strip region is defined by  $\tilde {D}\equiv \{(\tilde {X},\tilde {Y})\,|\,{-1/2} < \tilde {X} < 1/2, \ -\infty < \tilde {Y} < 0\}$, and
$\tilde {D}\equiv \{(\tilde {X},\tilde {Y})\,|\,{-1/2} < \tilde {X} < 1/2, \ -\infty < \tilde {Y} < 0\}$, and  $\widetilde {\nabla }^2 \equiv \partial ^2/\partial \tilde {X}^2 + \partial ^2/\partial \tilde {Y}^2$, with the boundary conditions
$\widetilde {\nabla }^2 \equiv \partial ^2/\partial \tilde {X}^2 + \partial ^2/\partial \tilde {Y}^2$, with the boundary conditions
 $$\begin{gather} \tilde{W}(\tilde{X},0) = 0,\quad -\frac{1}{2} <\tilde{X} < \frac{1}{2}, \end{gather}$$
$$\begin{gather} \tilde{W}(\tilde{X},0) = 0,\quad -\frac{1}{2} <\tilde{X} < \frac{1}{2}, \end{gather}$$ $$\begin{gather}\frac{\partial \tilde{W}}{\partial \tilde{X}}(\tilde{X},\tilde{Y}) =-\epsilon\,\frac{\partial w_P}{\partial x}(x,y),\quad \tilde{X} ={\pm} \frac{1}{2}, -\tilde{c} < \tilde{Y} < 0, \end{gather}$$
$$\begin{gather}\frac{\partial \tilde{W}}{\partial \tilde{X}}(\tilde{X},\tilde{Y}) =-\epsilon\,\frac{\partial w_P}{\partial x}(x,y),\quad \tilde{X} ={\pm} \frac{1}{2}, -\tilde{c} < \tilde{Y} < 0, \end{gather}$$ $$\begin{gather}\tilde{W}(\tilde{X},\tilde{Y}) = 0,\quad \tilde{X} ={\pm} \frac{1}{2}, -\infty<\tilde{Y}<-\tilde{c}. \end{gather}$$
$$\begin{gather}\tilde{W}(\tilde{X},\tilde{Y}) = 0,\quad \tilde{X} ={\pm} \frac{1}{2}, -\infty<\tilde{Y}<-\tilde{c}. \end{gather}$$ Consider  $\tilde {H}(\tilde {Z})\equiv \tilde {\chi } + {\rm i} \tilde {W}$, where
$\tilde {H}(\tilde {Z})\equiv \tilde {\chi } + {\rm i} \tilde {W}$, where  $\tilde {\chi }$ is a harmonic conjugate of the function
$\tilde {\chi }$ is a harmonic conjugate of the function  $\tilde {W}$. With the use of Cauchy–Riemann equations, the boundary condition (7.60) becomes
$\tilde {W}$. With the use of Cauchy–Riemann equations, the boundary condition (7.60) becomes
 \begin{equation} \tilde{\chi} = {\rm Re}[\tilde{H}(\tilde{Z})] =-{\rm Re}[\tilde{g}(\tilde{Z})]+ \frac{\epsilon^2}{2}\,{\rm Im}[\tilde{Z}]+ \chi_{{\pm}},\quad \tilde{X} ={\pm} \frac{1}{2}, -\tilde{c} < \tilde{Y} < 0, \end{equation}
\begin{equation} \tilde{\chi} = {\rm Re}[\tilde{H}(\tilde{Z})] =-{\rm Re}[\tilde{g}(\tilde{Z})]+ \frac{\epsilon^2}{2}\,{\rm Im}[\tilde{Z}]+ \chi_{{\pm}},\quad \tilde{X} ={\pm} \frac{1}{2}, -\tilde{c} < \tilde{Y} < 0, \end{equation}
and it is convenient to set  $\chi _-=0$.
$\chi _-=0$.
Let two conformal mappings be defined by
 $$\begin{gather} \tilde{Z} = {\mathcal{F}}(t) =-\frac{1}{\rm \pi} \sin^{-1} t, \end{gather}$$
$$\begin{gather} \tilde{Z} = {\mathcal{F}}(t) =-\frac{1}{\rm \pi} \sin^{-1} t, \end{gather}$$ $$\begin{gather}t = {\mathcal{G}}(\zeta) =-\frac{P(-\sqrt{\rho})^2}{P(\sqrt{\rho})^2}\times \frac{P(\zeta/\sqrt{\rho})\,P(\sqrt{\rho}\zeta)}{P(-\zeta/\sqrt{\rho})\,P(-\sqrt{\rho}\zeta)}, \end{gather}$$
$$\begin{gather}t = {\mathcal{G}}(\zeta) =-\frac{P(-\sqrt{\rho})^2}{P(\sqrt{\rho})^2}\times \frac{P(\zeta/\sqrt{\rho})\,P(\sqrt{\rho}\zeta)}{P(-\zeta/\sqrt{\rho})\,P(-\sqrt{\rho}\zeta)}, \end{gather}$$
where  ${\mathcal {F}}(t)$ is a conformal map from the upper half-plane in the complex
${\mathcal {F}}(t)$ is a conformal map from the upper half-plane in the complex  $t$-plane to the domain
$t$-plane to the domain  $\tilde {D}$, and
$\tilde {D}$, and  ${\mathcal {G}}(\zeta )$ is a map from the upper half-annular region in the
${\mathcal {G}}(\zeta )$ is a map from the upper half-annular region in the  $\zeta$-plane to the upper half
$\zeta$-plane to the upper half  $t$-plane. Here,
$t$-plane. Here,  $P(\cdot )$ is related to the prime function of the annulus (Crowdy Reference Crowdy2020) and can be represented explicitly by
$P(\cdot )$ is related to the prime function of the annulus (Crowdy Reference Crowdy2020) and can be represented explicitly by
 \begin{equation} P(\zeta)\equiv (1-\zeta)\prod_{n=1}^\infty (1-\rho^{2n}\zeta)(1-\rho^{2n}\zeta^{-1}). \end{equation}
\begin{equation} P(\zeta)\equiv (1-\zeta)\prod_{n=1}^\infty (1-\rho^{2n}\zeta)(1-\rho^{2n}\zeta^{-1}). \end{equation}
These conformal maps are illustrated in figure 13. Note that the inner radius  $\rho$ satisfies
$\rho$ satisfies
 \begin{equation} \frac{P(-\sqrt{\rho})^4}{P(\sqrt{\rho})^4} = \cosh({\rm \pi} \tilde{c}). \end{equation}
\begin{equation} \frac{P(-\sqrt{\rho})^4}{P(\sqrt{\rho})^4} = \cosh({\rm \pi} \tilde{c}). \end{equation}
Now we define  ${\mathcal {J}}(\zeta )\equiv {\mathcal {F}}({\mathcal {G}}(\zeta ))$ and
${\mathcal {J}}(\zeta )\equiv {\mathcal {F}}({\mathcal {G}}(\zeta ))$ and  $\tilde {{\mathcal {H}}}(\zeta )\equiv \tilde {H}({\mathcal {J}}(\zeta ))$. The conformal map
$\tilde {{\mathcal {H}}}(\zeta )\equiv \tilde {H}({\mathcal {J}}(\zeta ))$. The conformal map  ${\mathcal {J}}(\zeta )$ transplants: the upper semicircle
${\mathcal {J}}(\zeta )$ transplants: the upper semicircle  $C_0^+$ to
$C_0^+$ to  $\tilde {X}=-1/2$,
$\tilde {X}=-1/2$,  $-\tilde {c}<\tilde {Y}<0$; the upper semicircle with radius
$-\tilde {c}<\tilde {Y}<0$; the upper semicircle with radius  $\rho$ defined by
$\rho$ defined by  $C_1^+$ to
$C_1^+$ to  $\tilde {X}=1/2$,
$\tilde {X}=1/2$,  $-\tilde {c}<\tilde {Y}<0$; the positive real axis between
$-\tilde {c}<\tilde {Y}<0$; the positive real axis between  $0$ and
$0$ and  $1$ in the
$1$ in the  $\zeta$-plane to
$\zeta$-plane to  $-1/2<\tilde {X}<1/2$,
$-1/2<\tilde {X}<1/2$,  $\tilde {Y}=0$; and
$\tilde {Y}=0$; and  ${\mathcal {J}}(-\sqrt {\rho })=-{\rm i}\infty$.
${\mathcal {J}}(-\sqrt {\rho })=-{\rm i}\infty$.

Figure 13. Sequence of conformal mappings for finding  $\hat {w}(x,y)$ in case (3).
$\hat {w}(x,y)$ in case (3).
Using the boundary condition (7.62) and the Schwarz reflection principle, the boundary value problem for  $\tilde {{\mathcal {H}}}(\zeta )$ is given by
$\tilde {{\mathcal {H}}}(\zeta )$ is given by
 \begin{equation} {\rm Re}[\tilde{{\mathcal{H}}}(\zeta)] = \left\{\begin{aligned} & -{\rm Re}[\tilde{g}({\mathcal{J}}(\zeta))] + \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\zeta)],\quad \zeta \in C_0^+,\\ & -{\rm Re}[\tilde{g}({\mathcal{J}}(\overline{\zeta}))] + \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\overline{\zeta})],\quad \zeta \in C_0^-,\\ & -{\rm Re}[\tilde{g}({\mathcal{J}}(\zeta))] - \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\zeta)] + \chi_0,\quad \zeta \in C_1^+,\\ & -{\rm Re}[\tilde{g}({\mathcal{J}}(\overline{\zeta}))] - \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\overline{\zeta})]+\chi_0,\quad \zeta \in C_1^-, \end{aligned}\right. \end{equation}
\begin{equation} {\rm Re}[\tilde{{\mathcal{H}}}(\zeta)] = \left\{\begin{aligned} & -{\rm Re}[\tilde{g}({\mathcal{J}}(\zeta))] + \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\zeta)],\quad \zeta \in C_0^+,\\ & -{\rm Re}[\tilde{g}({\mathcal{J}}(\overline{\zeta}))] + \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\overline{\zeta})],\quad \zeta \in C_0^-,\\ & -{\rm Re}[\tilde{g}({\mathcal{J}}(\zeta))] - \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\zeta)] + \chi_0,\quad \zeta \in C_1^+,\\ & -{\rm Re}[\tilde{g}({\mathcal{J}}(\overline{\zeta}))] - \frac{\epsilon^2}{2}\,{\rm Im}[{\mathcal{J}}(\overline{\zeta})]+\chi_0,\quad \zeta \in C_1^-, \end{aligned}\right. \end{equation}
where  $\chi _+ \equiv \chi _0$ is a real constant. This is a classical Schwarz problem that can be solved by using Fourier–Laurent series expressions as follows:
$\chi _+ \equiv \chi _0$ is a real constant. This is a classical Schwarz problem that can be solved by using Fourier–Laurent series expressions as follows:
 \begin{equation} \tilde{{\mathcal{H}}}(\zeta) = b_0 + \sum_{n=1}^\infty b_n\left(\zeta^n - \frac{\rho^n}{\zeta^n} \right),\quad b_n\in \mathbb{R},\ n=0,1,\ldots, \end{equation}
\begin{equation} \tilde{{\mathcal{H}}}(\zeta) = b_0 + \sum_{n=1}^\infty b_n\left(\zeta^n - \frac{\rho^n}{\zeta^n} \right),\quad b_n\in \mathbb{R},\ n=0,1,\ldots, \end{equation}
where the coefficients and  $\chi _0$ can be determined by the Fourier integral and a single-valuedness condition for
$\chi _0$ can be determined by the Fourier integral and a single-valuedness condition for  $\tilde {{\mathcal {H}}}(\zeta )$.
$\tilde {{\mathcal {H}}}(\zeta )$.
We may now consider the limit of  $\tilde {c} \ll 1$, which corresponds to
$\tilde {c} \ll 1$, which corresponds to  $c/\epsilon \ll 1$, similar to case (2), but retain higher-order terms in our expressions. Note that when
$c/\epsilon \ll 1$, similar to case (2), but retain higher-order terms in our expressions. Note that when  $\tilde {c} = c/\epsilon \ll 1$,
$\tilde {c} = c/\epsilon \ll 1$,  $\cosh ({\rm \pi} c/\epsilon )\sim 1$, which means that
$\cosh ({\rm \pi} c/\epsilon )\sim 1$, which means that  $\rho$ is small due to the relation (7.66). When
$\rho$ is small due to the relation (7.66). When  $\rho$ is small, the prime function becomes
$\rho$ is small, the prime function becomes  $P(\zeta )\sim 1-\zeta$, which gives, from (7.66),
$P(\zeta )\sim 1-\zeta$, which gives, from (7.66),
 \begin{equation} \rho \sim \left(\frac{\gamma^{1/2}-1}{\gamma^{1/2}+1} \right)^2, \quad \gamma \equiv \cosh^{1/2}({\rm \pi} \tilde{c}). \end{equation}
\begin{equation} \rho \sim \left(\frac{\gamma^{1/2}-1}{\gamma^{1/2}+1} \right)^2, \quad \gamma \equiv \cosh^{1/2}({\rm \pi} \tilde{c}). \end{equation}Using this expression, the maps are given explicitly by
 \begin{equation} \zeta = {\mathcal{K}}(\tilde{Z}) \sim \frac{(1+\gamma)(\sin(-{\rm \pi} \tilde{Z})-\gamma)}{(1-\gamma)(\sin(-{\rm \pi} \tilde{Z})+\gamma)} + \left[\frac{(1+\gamma)^2(\sin(-{\rm \pi} \tilde{Z})-\gamma)^2}{(1-\gamma)^2(\sin(-{\rm \pi} \tilde{Z})+\gamma)^2} - 1\right]^{1/2} \end{equation}
\begin{equation} \zeta = {\mathcal{K}}(\tilde{Z}) \sim \frac{(1+\gamma)(\sin(-{\rm \pi} \tilde{Z})-\gamma)}{(1-\gamma)(\sin(-{\rm \pi} \tilde{Z})+\gamma)} + \left[\frac{(1+\gamma)^2(\sin(-{\rm \pi} \tilde{Z})-\gamma)^2}{(1-\gamma)^2(\sin(-{\rm \pi} \tilde{Z})+\gamma)^2} - 1\right]^{1/2} \end{equation}and
 \begin{equation} \tilde{Z} = {\mathcal{J}}(\zeta) =-\frac{1}{\rm \pi} \sin^{-1}\left[-\gamma \times \frac{(\gamma-1) -2(\gamma+1)\zeta + (\gamma-1)\zeta^2}{(\gamma-1)+2(\gamma+1)\zeta + (\gamma-1)\zeta^2}\right]. \end{equation}
\begin{equation} \tilde{Z} = {\mathcal{J}}(\zeta) =-\frac{1}{\rm \pi} \sin^{-1}\left[-\gamma \times \frac{(\gamma-1) -2(\gamma+1)\zeta + (\gamma-1)\zeta^2}{(\gamma-1)+2(\gamma+1)\zeta + (\gamma-1)\zeta^2}\right]. \end{equation}
In order to calculate  $\hat {w}(0,y)$ for
$\hat {w}(0,y)$ for  $1< y<1+c$, which means that
$1< y<1+c$, which means that  $\zeta$ lies on the upper semicircle, it is assumed that the flow is approximated well by only the first two terms:
$\zeta$ lies on the upper semicircle, it is assumed that the flow is approximated well by only the first two terms:
 \begin{equation} \hat{w}(0,y) = {\rm Im}[\tilde{H}(\zeta)] = \sum_{n=1}^\infty b_n\,{\rm Im}\left[\zeta^n - \frac{\rho^n}{\zeta^n} \right]\sim \frac{(1+\rho)b_1}{2{\rm i}}\,(\zeta - \zeta^{-1}), \end{equation}
\begin{equation} \hat{w}(0,y) = {\rm Im}[\tilde{H}(\zeta)] = \sum_{n=1}^\infty b_n\,{\rm Im}\left[\zeta^n - \frac{\rho^n}{\zeta^n} \right]\sim \frac{(1+\rho)b_1}{2{\rm i}}\,(\zeta - \zeta^{-1}), \end{equation}
where we have used  $\overline {\zeta } = \zeta ^{-1}$ on the unit circle, and
$\overline {\zeta } = \zeta ^{-1}$ on the unit circle, and  $b_1$ is given by
$b_1$ is given by
 \begin{equation} b_1 = \frac{2(1+\rho)}{{\rm \pi} }\int_{0}^{\rm \pi}\left[-\tilde{g}({\mathcal{J}}({\rm e}^{{\rm i}\theta})) + \frac{\epsilon^2}{2{\rm i}}\left({\mathcal{J}}({\rm e}^{{\rm i} \theta}) + \frac{1}{2}\right) \right]\cos\theta \,{\rm d}\theta. \end{equation}
\begin{equation} b_1 = \frac{2(1+\rho)}{{\rm \pi} }\int_{0}^{\rm \pi}\left[-\tilde{g}({\mathcal{J}}({\rm e}^{{\rm i}\theta})) + \frac{\epsilon^2}{2{\rm i}}\left({\mathcal{J}}({\rm e}^{{\rm i} \theta}) + \frac{1}{2}\right) \right]\cos\theta \,{\rm d}\theta. \end{equation}
Using the conformal map (7.70) and the arguments above, we arrive at the final expressions for the velocity on  $x=0$,
$x=0$,  $1< y<1+c$ as follows:
$1< y<1+c$ as follows:
 \begin{equation} \hat{w}(0,y) = \hat{A} \left[1 - \frac{(1+\gamma)^2(\cosh({\rm \pi}(y-1-c)/\epsilon)-\gamma)^2}{(1-\gamma)^2(\cosh({\rm \pi}(y-1-c)/\epsilon)+\gamma)^2}\right]^{1/2}, \end{equation}
\begin{equation} \hat{w}(0,y) = \hat{A} \left[1 - \frac{(1+\gamma)^2(\cosh({\rm \pi}(y-1-c)/\epsilon)-\gamma)^2}{(1-\gamma)^2(\cosh({\rm \pi}(y-1-c)/\epsilon)+\gamma)^2}\right]^{1/2}, \end{equation}with
 \begin{equation} \hat{A} = (1+\rho) b_1 = \frac{2(1+\rho)^2}{{\rm \pi} }\int_{0}^{\rm \pi}\left[-\tilde{g}({\mathcal{J}}({\rm e}^{{\rm i}\theta})) + \frac{\epsilon^2}{2{\rm i}}\left({\mathcal{J}}({\rm e}^{{\rm i} \theta}) + \frac{1}{2}\right) \right]\cos\theta \,{\rm d}\theta. \end{equation}
\begin{equation} \hat{A} = (1+\rho) b_1 = \frac{2(1+\rho)^2}{{\rm \pi} }\int_{0}^{\rm \pi}\left[-\tilde{g}({\mathcal{J}}({\rm e}^{{\rm i}\theta})) + \frac{\epsilon^2}{2{\rm i}}\left({\mathcal{J}}({\rm e}^{{\rm i} \theta}) + \frac{1}{2}\right) \right]\cos\theta \,{\rm d}\theta. \end{equation}
With these expressions and (3.9), the mean velocity  $w_{m}$ can be calculated. This is the same as (3.12) in case (3).
$w_{m}$ can be calculated. This is the same as (3.12) in case (3).
It is important to note that if we further approximate in the limit  $\tilde {c} = c/\epsilon \ll 1$, then
$\tilde {c} = c/\epsilon \ll 1$, then
 \begin{equation} \cosh\left(\frac{{\rm \pi}(y-1-c)}{\epsilon} \right) \sim 1+ \frac{{\rm \pi}^2(y-1-c)^2}{2\epsilon^2},\quad 1\leq y\leq 1+c, \end{equation}
\begin{equation} \cosh\left(\frac{{\rm \pi}(y-1-c)}{\epsilon} \right) \sim 1+ \frac{{\rm \pi}^2(y-1-c)^2}{2\epsilon^2},\quad 1\leq y\leq 1+c, \end{equation}and the average velocity can be simplified to
 \begin{equation} w_{m} \sim \frac{\epsilon^2}{12} - \frac{1}{1+c}\left[\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^3}{{\rm \pi}^5 n^5 }\tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right)-\frac{c^4}{4{\rm \pi}\epsilon }\left(\log\frac{4\epsilon}{{\rm \pi} c}+\frac{3}{4} \right)^2\right]. \end{equation}
\begin{equation} w_{m} \sim \frac{\epsilon^2}{12} - \frac{1}{1+c}\left[\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^3}{{\rm \pi}^5 n^5 }\tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right)-\frac{c^4}{4{\rm \pi}\epsilon }\left(\log\frac{4\epsilon}{{\rm \pi} c}+\frac{3}{4} \right)^2\right]. \end{equation}
The derivation of (7.77) is given in Appendix D. It is straightforward to check that (7.77) agrees, as it should, with the formula (3.11) from case (2) up to and including order  $O(c^4 \log ^2(\epsilon /c)/\epsilon )$, which is the asymptotic order expected.
$O(c^4 \log ^2(\epsilon /c)/\epsilon )$, which is the asymptotic order expected.
8. Connection to another fluid problem
The  $c\neq 0$ problem is mathematically the same as that for pressure-driven flow of a liquid in the Wenzel (wetted) state in a superhydrophobic microchannel textured on one side with a periodic array of ridges oriented parallel to the flow, as per figure 14(a). Both are governed by (2.7) and the same no-slip and symmetry (shear free) boundary conditions, including the former on the fin tip. When the ridges become vanishingly thin, the problem is identical to the resolved heat sink problem. Relatedly, liquid flowing through a symmetrically textured superhydrophobic microchannel in the Cassie (unwetted) state is shown in figure 14(b). Moreover, the latter configuration with a single pair of ridges and (flat) menisci, and partial wetting is shown in figure 14(c). This problem too is mathematically the same as the heat sink problem for finite-thickness fins as shown in figure 14(d). With no partial wetting, as per figure 14(e), the problem is identical to the heat sink problem resolved as per figure 14(f). We note that partial wetting can substantially increase the resistance to flow through a superhydrophobic microchannel – see e.g. the numerical study by Salamon et al. (Reference Salamon, Lee, Krupenkin, Hodes, Kolodner, Enright and Salinger2005) and the analysis by Crowdy (Reference Crowdy2021). This is because the lengths of the wetted sides and top of the structures tend to be comparable; cf. the modest effect fin thickness on
$c\neq 0$ problem is mathematically the same as that for pressure-driven flow of a liquid in the Wenzel (wetted) state in a superhydrophobic microchannel textured on one side with a periodic array of ridges oriented parallel to the flow, as per figure 14(a). Both are governed by (2.7) and the same no-slip and symmetry (shear free) boundary conditions, including the former on the fin tip. When the ridges become vanishingly thin, the problem is identical to the resolved heat sink problem. Relatedly, liquid flowing through a symmetrically textured superhydrophobic microchannel in the Cassie (unwetted) state is shown in figure 14(b). Moreover, the latter configuration with a single pair of ridges and (flat) menisci, and partial wetting is shown in figure 14(c). This problem too is mathematically the same as the heat sink problem for finite-thickness fins as shown in figure 14(d). With no partial wetting, as per figure 14(e), the problem is identical to the heat sink problem resolved as per figure 14(f). We note that partial wetting can substantially increase the resistance to flow through a superhydrophobic microchannel – see e.g. the numerical study by Salamon et al. (Reference Salamon, Lee, Krupenkin, Hodes, Kolodner, Enright and Salinger2005) and the analysis by Crowdy (Reference Crowdy2021). This is because the lengths of the wetted sides and top of the structures tend to be comparable; cf. the modest effect fin thickness on  $f\,{Re}$ observed by Sparrow & Hsu (Reference Sparrow and Hsu1981) as discussed in § 1.
$f\,{Re}$ observed by Sparrow & Hsu (Reference Sparrow and Hsu1981) as discussed in § 1.

Figure 14. (a) Pressure-driven flow through a superhydrophobic microchannel textured with ridges oriented parallel to the flow and the liquid in the Wenzel state. (b) Same as (a) with liquid in the Cassie state. (c) Same as (b) for a single pair of ridges and menisci, idealized as flat, and partial wetting of the ridges. (d) One period of an LFHS. (e) Same as (c) with no partial wetting. (f) One period of an LFHS with vanishingly thin fins.
9. Discussion
Until now, fully developed flow through the ducts formed between fins in an unshrouded, longitudinal-fin heat sink (LFHS) has been resolved only numerically. This is because the no-slip boundary condition along a fin switches to a shear-free one above it, thus a mixed boundary condition need be resolved. We have developed an exact solution to this problem via complex analysis, and, moreover, a suite of simpler ones using asymptotic analysis that span virtually the whole parameter space. Finally, we have provided a new result (3.4) for the  $f\,{Re}$ product for flow through a rectangular channel that is more accurate than the polynomial fits to the exact solution found in standard textbooks.
$f\,{Re}$ product for flow through a rectangular channel that is more accurate than the polynomial fits to the exact solution found in standard textbooks.
From an engineering perspective, our  $f\,{Re}$ results provide a means to compute the caloric resistance of an LFHS. Moreover, related work (Kirk & Hodes Reference Kirk and Hodes2024) provides complementary formulae to compute (conjugate) Nusselt numbers and thus total resistance. This is a substantive contribution to the heat transfer literature, which, from the viewpoint of analytical results, is mostly restricted to ducts that are no-slip and either isothermal or isoflux around their entire periphery. It is noted that in some cases, the fully developed flow (and temperature) assumption is invalid. Such problems have been tackled only numerically; see e.g. the study by Karamanis & Hodes (Reference Karamanis and Hodes2019a) for simultaneously developing flow through an LFHS.
$f\,{Re}$ results provide a means to compute the caloric resistance of an LFHS. Moreover, related work (Kirk & Hodes Reference Kirk and Hodes2024) provides complementary formulae to compute (conjugate) Nusselt numbers and thus total resistance. This is a substantive contribution to the heat transfer literature, which, from the viewpoint of analytical results, is mostly restricted to ducts that are no-slip and either isothermal or isoflux around their entire periphery. It is noted that in some cases, the fully developed flow (and temperature) assumption is invalid. Such problems have been tackled only numerically; see e.g. the study by Karamanis & Hodes (Reference Karamanis and Hodes2019a) for simultaneously developing flow through an LFHS.
Acknowledgement
Dr Hy Dinh prepared figure 14.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Evaluation of the prime function
The prime function  $\omega ({\cdot },{\cdot })$ can be evaluated by freely available codes written on the MATLAB platform (Github website ACCA). These codes are based on a numerical algorithm described in detail in Crowdy et al. (Reference Crowdy, Kropf, Green and Nasser2016), which extends an earlier algorithm proposed by Crowdy & Marshall (Reference Crowdy and Marshall2007).
$\omega ({\cdot },{\cdot })$ can be evaluated by freely available codes written on the MATLAB platform (Github website ACCA). These codes are based on a numerical algorithm described in detail in Crowdy et al. (Reference Crowdy, Kropf, Green and Nasser2016), which extends an earlier algorithm proposed by Crowdy & Marshall (Reference Crowdy and Marshall2007).
For a triply connected domain, however, it is also known (see Chapter 14 of Crowdy Reference Crowdy2020) that the infinite product representation
 \begin{equation} \omega(z,\zeta) =(z-\zeta)\prod_{\theta\in\varTheta''} \frac{(\theta(z)-\zeta)(\theta(\zeta)-z)}{(\theta(z)-z)(\theta(\zeta)-\zeta)} \end{equation}
\begin{equation} \omega(z,\zeta) =(z-\zeta)\prod_{\theta\in\varTheta''} \frac{(\theta(z)-\zeta)(\theta(\zeta)-z)}{(\theta(z)-z)(\theta(\zeta)-\zeta)} \end{equation}
is convergent; here, each function  $\theta$ lies in the set of Möbius maps
$\theta$ lies in the set of Möbius maps  $\varTheta ''$ that denotes all elements of the free Schottky group generated by the basic Möbius maps
$\varTheta ''$ that denotes all elements of the free Schottky group generated by the basic Möbius maps  $\lbrace \theta _j, \theta _j^{-1}: j=1,2 \rbrace$ except for the identity and excluding all inverses (Crowdy & Marshall Reference Crowdy and Marshall2007; Crowdy et al. Reference Crowdy, Kropf, Green and Nasser2016; Crowdy Reference Crowdy2020). For numerical purposes of evaluation, it is necessary to truncate this product, and the natural way to do so is to include all Möbius maps up to a chosen level; see Crowdy & Marshall (Reference Crowdy and Marshall2007) for more details. Use of this infinite product is perfectly feasible for most channel geometries, but to maintain a required degree of accuracy requires truncation at increasingly high levels as the radii of
$\lbrace \theta _j, \theta _j^{-1}: j=1,2 \rbrace$ except for the identity and excluding all inverses (Crowdy & Marshall Reference Crowdy and Marshall2007; Crowdy et al. Reference Crowdy, Kropf, Green and Nasser2016; Crowdy Reference Crowdy2020). For numerical purposes of evaluation, it is necessary to truncate this product, and the natural way to do so is to include all Möbius maps up to a chosen level; see Crowdy & Marshall (Reference Crowdy and Marshall2007) for more details. Use of this infinite product is perfectly feasible for most channel geometries, but to maintain a required degree of accuracy requires truncation at increasingly high levels as the radii of  $C_1$ and
$C_1$ and  $C_2$ get larger, and then convergence of the product can become unacceptably slow. In such cases, use of the aforementioned MATLAB code is preferred and advised.
$C_2$ get larger, and then convergence of the product can become unacceptably slow. In such cases, use of the aforementioned MATLAB code is preferred and advised.
Appendix B. Derivation of the mean velocity
Here, we explain how to derive (3.9). The mean velocity of  $w(x,y)$ in the period window is given by
$w(x,y)$ in the period window is given by
 \begin{equation} w_{m}= \frac{1}{\epsilon(1+c)} \int_{D} w(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y = \frac{\epsilon^2}{12} + \frac{1}{\epsilon(1+c)}\int_{D}(\hat{w}_P(x,y)+\hat{w}(x,y))\,{\rm d}\kern0.06em x \,{\rm d} y. \end{equation}
\begin{equation} w_{m}= \frac{1}{\epsilon(1+c)} \int_{D} w(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y = \frac{\epsilon^2}{12} + \frac{1}{\epsilon(1+c)}\int_{D}(\hat{w}_P(x,y)+\hat{w}(x,y))\,{\rm d}\kern0.06em x \,{\rm d} y. \end{equation} By Green's second identity and the reciprocity theorem for channel flow proposed by Crowdy (Reference Crowdy2017), the volume flux of  $\hat {w}_P(x,y)$ and
$\hat {w}_P(x,y)$ and  $\hat {w}(x,y)$ can be calculated as follows:
$\hat {w}(x,y)$ can be calculated as follows:
 \begin{align} &\int_{D}\hat{w}_P(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y =-\int_{D}(\hat{w}_P\nabla^2 w_{P,0} - w_{P,0}\,\nabla^2\hat{w}_P) \,{\rm d}\kern0.06em x\,{\rm d} y \end{align}
\begin{align} &\int_{D}\hat{w}_P(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y =-\int_{D}(\hat{w}_P\nabla^2 w_{P,0} - w_{P,0}\,\nabla^2\hat{w}_P) \,{\rm d}\kern0.06em x\,{\rm d} y \end{align} \begin{align} &\quad=-\oint_{\partial D}\left(\hat{w}_P\,\frac{\partial w_{P,0}}{\partial n} - w_{P,0}\,\frac{\partial \hat{w}_P}{\partial n}\right){\rm d}s \end{align}
\begin{align} &\quad=-\oint_{\partial D}\left(\hat{w}_P\,\frac{\partial w_{P,0}}{\partial n} - w_{P,0}\,\frac{\partial \hat{w}_P}{\partial n}\right){\rm d}s \end{align} \begin{align} &\quad=\int_{0}^\epsilon w_{P,0}(x,1+c)\,\frac{\partial \hat{w}_P}{\partial y}(x,1+c)\,{\rm d}\kern0.06em x - \int_{0}^\epsilon w_{P,0}(x,0)\,\frac{\partial \hat{w}_P}{\partial y}(x,0)\,{\rm d}\kern0.06em x \end{align}
\begin{align} &\quad=\int_{0}^\epsilon w_{P,0}(x,1+c)\,\frac{\partial \hat{w}_P}{\partial y}(x,1+c)\,{\rm d}\kern0.06em x - \int_{0}^\epsilon w_{P,0}(x,0)\,\frac{\partial \hat{w}_P}{\partial y}(x,0)\,{\rm d}\kern0.06em x \end{align} \begin{align} &\quad=\int_{0}^\epsilon w_{P,0}(x,1+c)\,\frac{\partial \chi_P}{\partial x}(x,1+c)\,{\rm d}\kern0.06em x - \int_{0}^\epsilon w_{P,0}(x,0)\,\frac{\partial \chi_P}{\partial y}(x,0)\,{\rm d}\kern0.06em x \end{align}
\begin{align} &\quad=\int_{0}^\epsilon w_{P,0}(x,1+c)\,\frac{\partial \chi_P}{\partial x}(x,1+c)\,{\rm d}\kern0.06em x - \int_{0}^\epsilon w_{P,0}(x,0)\,\frac{\partial \chi_P}{\partial y}(x,0)\,{\rm d}\kern0.06em x \end{align} \begin{align} &\quad=-\int_{0}^\epsilon \frac{\partial w_{P,0}}{\partial x}(x,1+c)\,\chi_P(x,1+c)\,{\rm d}\kern0.06em x + \int_{0}^\epsilon \frac{\partial w_{P,0}}{\partial x}(x,0)\,\chi_P(x,0)\,{\rm d}\kern0.06em x \end{align}
\begin{align} &\quad=-\int_{0}^\epsilon \frac{\partial w_{P,0}}{\partial x}(x,1+c)\,\chi_P(x,1+c)\,{\rm d}\kern0.06em x + \int_{0}^\epsilon \frac{\partial w_{P,0}}{\partial x}(x,0)\,\chi_P(x,0)\,{\rm d}\kern0.06em x \end{align} \begin{align} &\quad=2\int_{0}^{\epsilon }\left(\frac{\epsilon}{2} -x\right) {\rm Re}[g(x;c)]\, {\rm d}\kern0.06em x=-\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^4 (1-{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}{{\rm \pi}^5 n^5 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})} \end{align}
\begin{align} &\quad=2\int_{0}^{\epsilon }\left(\frac{\epsilon}{2} -x\right) {\rm Re}[g(x;c)]\, {\rm d}\kern0.06em x=-\sum_{n=1,3,\ldots}^\infty \frac{16\epsilon^4 (1-{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}{{\rm \pi}^5 n^5 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})} \end{align} \begin{align} &\quad=-\sum_{n=1,3,\ldots}^\infty \frac{16 \epsilon^4}{{\rm \pi}^5 n^5} \tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right), \end{align}
\begin{align} &\quad=-\sum_{n=1,3,\ldots}^\infty \frac{16 \epsilon^4}{{\rm \pi}^5 n^5} \tanh\left(\frac{n{\rm \pi} (1+c)}{2\epsilon} \right), \end{align}
where  $\chi _P = {\rm Re}[g(z;c)]$. We have used the Cauchy–Riemann equations from the third line to the fourth line,
$\chi _P = {\rm Re}[g(z;c)]$. We have used the Cauchy–Riemann equations from the third line to the fourth line,  $\chi _P(x,0) = -\chi _P(x,1+c)$ by the definition of
$\chi _P(x,0) = -\chi _P(x,1+c)$ by the definition of  $g(z;c)$, and we have used
$g(z;c)$, and we have used
 \begin{equation} {\rm Re}[g(x;c)] =-\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2(1-{\rm e}^{-n{\rm \pi} (1+c)/\epsilon})}{{\rm \pi}^3 n^3 (1+{\rm e}^{-n{\rm \pi} (1+c)/\epsilon})} \cos\frac{n{\rm \pi} x}{\epsilon}. \end{equation}
\begin{equation} {\rm Re}[g(x;c)] =-\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2(1-{\rm e}^{-n{\rm \pi} (1+c)/\epsilon})}{{\rm \pi}^3 n^3 (1+{\rm e}^{-n{\rm \pi} (1+c)/\epsilon})} \cos\frac{n{\rm \pi} x}{\epsilon}. \end{equation}
For  $\hat {w}$, we can use the same technique to obtain
$\hat {w}$, we can use the same technique to obtain
 \begin{align} \int_{D}\hat{w}(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y &=-\int_{D} (\hat{w}\, \nabla^2 w_P - w_P\,\nabla^2 \hat{w}) \,{\rm d}\kern0.06em x\,{\rm d} y \end{align}
\begin{align} \int_{D}\hat{w}(x,y)\,{\rm d}\kern0.06em x\,{\rm d} y &=-\int_{D} (\hat{w}\, \nabla^2 w_P - w_P\,\nabla^2 \hat{w}) \,{\rm d}\kern0.06em x\,{\rm d} y \end{align} \begin{align} &=-\oint_{\partial D} \left(\hat{w}\,\frac{\partial w_P}{\partial n} - w_P\, \frac{\partial\hat{w}}{\partial n}\right) {\rm d}s \end{align}
\begin{align} &=-\oint_{\partial D} \left(\hat{w}\,\frac{\partial w_P}{\partial n} - w_P\, \frac{\partial\hat{w}}{\partial n}\right) {\rm d}s \end{align} \begin{align} &=2\int_{1}^{1+c}\left(\frac{\epsilon}{2} + \frac{\partial \hat{w}_P}{\partial x} \right)\hat{w}(0,y)\,{\rm d} y \end{align}
\begin{align} &=2\int_{1}^{1+c}\left(\frac{\epsilon}{2} + \frac{\partial \hat{w}_P}{\partial x} \right)\hat{w}(0,y)\,{\rm d} y \end{align} \begin{align} &=\int_{1}^{1+c}\left(\epsilon-\sum_{n=1,3,\ldots}^\infty \frac{8\epsilon({\rm e}^{-n{\rm \pi} y/\epsilon} + {\rm e}^{n{\rm \pi}(y-1-c)/\epsilon})}{{\rm \pi}^2n^2 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}\right)\hat{w}(0,y)\,{\rm d} y. \end{align}
\begin{align} &=\int_{1}^{1+c}\left(\epsilon-\sum_{n=1,3,\ldots}^\infty \frac{8\epsilon({\rm e}^{-n{\rm \pi} y/\epsilon} + {\rm e}^{n{\rm \pi}(y-1-c)/\epsilon})}{{\rm \pi}^2n^2 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}\right)\hat{w}(0,y)\,{\rm d} y. \end{align}Thus the final formula (3.9) for the mean velocity of the periodic heat sink is derived.
Appendix C. Solution in the asymptotic tip region
In this appendix, we derive the solution (7.29) to the problem (7.24)–(7.28) for  $W_1$. First, since
$W_1$. First, since  $W_1$ is harmonic we may write it as the imaginary part of an analytic function of
$W_1$ is harmonic we may write it as the imaginary part of an analytic function of  $Z = X + \mathrm {i}Y$, that is,
$Z = X + \mathrm {i}Y$, that is,  $W_1 = \mathrm {Im}[h(Z)]$ for
$W_1 = \mathrm {Im}[h(Z)]$ for  $Z \in D_{tip}$. Then the Dirichlet boundary condition (7.25) can be written as
$Z \in D_{tip}$. Then the Dirichlet boundary condition (7.25) can be written as
 \begin{equation} \mathrm{Im}[h(Z)] = 0\quad \text{on }X=0,1,\ Y<0, \end{equation}
\begin{equation} \mathrm{Im}[h(Z)] = 0\quad \text{on }X=0,1,\ Y<0, \end{equation}
and, using the Cauchy–Riemann equations, the Neumann condition (7.26) can be written as  $\partial ( \mathrm {Im}[h])/ \partial X = -\partial ( {\rm Re}[h])/ \partial Y = 0$. Integrating the latter with respect to
$\partial ( \mathrm {Im}[h])/ \partial X = -\partial ( {\rm Re}[h])/ \partial Y = 0$. Integrating the latter with respect to  $Y$ gives
$Y$ gives
 \begin{equation} {\rm Re}[h(Z)] = \begin{cases} 0 & \text{on }X=0,\ Y>0,\\ E & \text{on }X=1,\ Y>0, \end{cases} \end{equation}
\begin{equation} {\rm Re}[h(Z)] = \begin{cases} 0 & \text{on }X=0,\ Y>0,\\ E & \text{on }X=1,\ Y>0, \end{cases} \end{equation}
where the constant on the  $X=0$ boundary has been chosen to be zero, and the constant
$X=0$ boundary has been chosen to be zero, and the constant  $E$ is not necessarily zero. The matching conditions (7.27)–(7.28) as
$E$ is not necessarily zero. The matching conditions (7.27)–(7.28) as  $Y \to \pm \infty$ are satisfied if
$Y \to \pm \infty$ are satisfied if
 $$\begin{gather} h(Z) \sim \tfrac{1}{2}cZ\quad \text{as }Z \to \mathrm{i}\infty\text{ in }D_{tip}, \end{gather}$$
$$\begin{gather} h(Z) \sim \tfrac{1}{2}cZ\quad \text{as }Z \to \mathrm{i}\infty\text{ in }D_{tip}, \end{gather}$$ $$\begin{gather}\mathrm{Im}[h(Z)] \to 0 \quad \text{as }Z \to -\mathrm{i}\infty\text{ in }D_{tip}. \end{gather}$$
$$\begin{gather}\mathrm{Im}[h(Z)] \to 0 \quad \text{as }Z \to -\mathrm{i}\infty\text{ in }D_{tip}. \end{gather}$$ To find the analytic function  $h(Z)$, we consider mapping the domain
$h(Z)$, we consider mapping the domain  $D_{tip}$ to the upper semi-disc
$D_{tip}$ to the upper semi-disc  $D_\zeta$ in an auxiliary
$D_\zeta$ in an auxiliary  $\zeta$-plane via the sequence of conformal maps
$\zeta$-plane via the sequence of conformal maps
 \begin{equation} \sigma = \mathrm{e}^{\mathrm{i}{\rm \pi} Z},\quad \tau = \frac{\sigma - 1}{\sigma +1}, \quad \nu = \tau^{1/2}, \quad \zeta = \frac{\mathrm{i}-\nu}{\mathrm{i} + \nu} \end{equation}
\begin{equation} \sigma = \mathrm{e}^{\mathrm{i}{\rm \pi} Z},\quad \tau = \frac{\sigma - 1}{\sigma +1}, \quad \nu = \tau^{1/2}, \quad \zeta = \frac{\mathrm{i}-\nu}{\mathrm{i} + \nu} \end{equation}(illustrated in figure 15), which, when composed, give
 \begin{equation} \zeta(Z) = \frac{{\rm e}^{\mathrm{i}{\rm \pi}/4} - \tan^{1/2}({\rm \pi} Z/2)}{{\rm e}^{\mathrm{i}{\rm \pi}/4} + \tan^{1/2}({\rm \pi} Z/2)}. \end{equation}
\begin{equation} \zeta(Z) = \frac{{\rm e}^{\mathrm{i}{\rm \pi}/4} - \tan^{1/2}({\rm \pi} Z/2)}{{\rm e}^{\mathrm{i}{\rm \pi}/4} + \tan^{1/2}({\rm \pi} Z/2)}. \end{equation}
Denoting the solution in the  $\zeta$-plane as
$\zeta$-plane as  $H(\zeta ) = h(Z(\zeta ))$, the boundary conditions on
$H(\zeta ) = h(Z(\zeta ))$, the boundary conditions on  $H$ are
$H$ are
 $$\begin{gather} {\rm Re}[H(\zeta)] = \begin{cases} 0 & \text{on } {\rm arg}(\zeta) = 0, \\ E & \text{on } {\rm arg}(\zeta) = {\rm \pi}, \end{cases} \end{gather}$$
$$\begin{gather} {\rm Re}[H(\zeta)] = \begin{cases} 0 & \text{on } {\rm arg}(\zeta) = 0, \\ E & \text{on } {\rm arg}(\zeta) = {\rm \pi}, \end{cases} \end{gather}$$ $$\begin{gather}\mathrm{Im}[H(\zeta)] = 0\quad \text{on } |\zeta| = 1. \end{gather}$$
$$\begin{gather}\mathrm{Im}[H(\zeta)] = 0\quad \text{on } |\zeta| = 1. \end{gather}$$
Figure 15. Sequence of conformal maps (C5a–d), taking the infinite strip in the  $Z$-plane (the ‘tip region’) to the upper half unit disc in the
$Z$-plane (the ‘tip region’) to the upper half unit disc in the  $\zeta$-plane. The red and magenta portions are the symmetry boundaries where
$\zeta$-plane. The red and magenta portions are the symmetry boundaries where  ${\rm Re}[h]=0$ and
${\rm Re}[h]=0$ and  $E$, respectively. The blue parts are where
$E$, respectively. The blue parts are where  $\mathrm {Im}[h]=0$.
$\mathrm {Im}[h]=0$.
From the map (C6) (and figure 15), we see that the condition at  $Z\to \mathrm {i}\infty$ maps to
$Z\to \mathrm {i}\infty$ maps to  $\zeta = 0$. The behaviour of (C6) can be shown to be
$\zeta = 0$. The behaviour of (C6) can be shown to be
 \begin{equation} \zeta \sim \tfrac{1}{2}{\rm e}^{\mathrm{i}{\rm \pi} Z}, \quad Z \to \mathrm{i}\infty\text{ in }D_{tip}, \end{equation}
\begin{equation} \zeta \sim \tfrac{1}{2}{\rm e}^{\mathrm{i}{\rm \pi} Z}, \quad Z \to \mathrm{i}\infty\text{ in }D_{tip}, \end{equation}or
 \begin{equation} Z \sim \frac{1}{{\rm \pi}\mathrm{i}} \log(2 \zeta) \sim \frac{1}{{\rm \pi}\mathrm{i}} \log \zeta, \quad \zeta \to 0, \end{equation}
\begin{equation} Z \sim \frac{1}{{\rm \pi}\mathrm{i}} \log(2 \zeta) \sim \frac{1}{{\rm \pi}\mathrm{i}} \log \zeta, \quad \zeta \to 0, \end{equation}hence the far-field condition (C3) implies
 \begin{equation} H(\zeta) \sim \frac{c}{2{\rm \pi}\mathrm{i}} \log \zeta \quad \text{as } \zeta \to 0. \end{equation}
\begin{equation} H(\zeta) \sim \frac{c}{2{\rm \pi}\mathrm{i}} \log \zeta \quad \text{as } \zeta \to 0. \end{equation}
Given this local behaviour near  $\zeta =0$, and the combination of boundary conditions,
$\zeta =0$, and the combination of boundary conditions,  $H(\zeta )$ can be interpreted as the complex potential for a rather different flow problem: two-dimensional inviscid flow due to a point vortex of strength
$H(\zeta )$ can be interpreted as the complex potential for a rather different flow problem: two-dimensional inviscid flow due to a point vortex of strength  $c$ at
$c$ at  $\zeta =0$. In particular, our desired solution in the upper semi-disc comprises the upper half of the flow field (or complex potential) due to a vortex in the centre of a disc with an impermeable boundary. (The streamfunction, i.e. imaginary part, of this inviscid flow, then corresponds to the desired velocity
$\zeta =0$. In particular, our desired solution in the upper semi-disc comprises the upper half of the flow field (or complex potential) due to a vortex in the centre of a disc with an impermeable boundary. (The streamfunction, i.e. imaginary part, of this inviscid flow, then corresponds to the desired velocity  $W_1$ in the physical domain
$W_1$ in the physical domain  $Z$.) Due to rotational symmetry, the solution for that case is simply
$Z$.) Due to rotational symmetry, the solution for that case is simply
 \begin{equation} H(\zeta) = \frac{c}{2{\rm \pi}\mathrm{i}} \log \zeta, \end{equation}
\begin{equation} H(\zeta) = \frac{c}{2{\rm \pi}\mathrm{i}} \log \zeta, \end{equation}
and it can be verified easily that this satisfies the desired conditions (C7), (C8), (C11), with constant  $E = c/2$.
$E = c/2$.
Substituting (C6) into (C12) and simplifying, the solution in the original  $Z$ domain is then
$Z$ domain is then
 \begin{equation} h(Z) = \frac{c}{2{\rm \pi}\mathrm{i}}\log \left[ \frac{{\rm e}^{\mathrm{i}{\rm \pi}/4} -\tan^{1/2}({\rm \pi} Z /2)}{{\rm e}^{\mathrm{i}{\rm \pi}/4} + \tan^{1/2}({\rm \pi} Z /2)} \right], \end{equation}
\begin{equation} h(Z) = \frac{c}{2{\rm \pi}\mathrm{i}}\log \left[ \frac{{\rm e}^{\mathrm{i}{\rm \pi}/4} -\tan^{1/2}({\rm \pi} Z /2)}{{\rm e}^{\mathrm{i}{\rm \pi}/4} + \tan^{1/2}({\rm \pi} Z /2)} \right], \end{equation}and taking the imaginary part gives the result (7.29).
Of interest to the behaviour in the gap region ( $1 < y < 1+c$), we may extract the far-field behaviour of (C13) as
$1 < y < 1+c$), we may extract the far-field behaviour of (C13) as  $Y\to \infty$. This is easier in the
$Y\to \infty$. This is easier in the  $\zeta$-plane, which corresponds to
$\zeta$-plane, which corresponds to  $\zeta \to 0$, where the asymptotic behaviour is known exactly, i.e. (C12). From the map (C6) on
$\zeta \to 0$, where the asymptotic behaviour is known exactly, i.e. (C12). From the map (C6) on  $Z=\mathrm {i}Y$, we have
$Z=\mathrm {i}Y$, we have  $\zeta \sim \frac {1}{2}{\rm e}^{-{\rm \pi} Y} + O({\rm e}^{-2{\rm \pi} Y})$ as
$\zeta \sim \frac {1}{2}{\rm e}^{-{\rm \pi} Y} + O({\rm e}^{-2{\rm \pi} Y})$ as  $Y \to \infty$, which on substitution into (C12) results in
$Y \to \infty$, which on substitution into (C12) results in
 \begin{equation} h(Z) \sim \frac{c}{2} \left[ Z + \frac{\mathrm{i}\log 2}{\rm \pi} + O({\rm e}^{-{\rm \pi} Y}) \right] \quad \text{as } Y \to \infty. \end{equation}
\begin{equation} h(Z) \sim \frac{c}{2} \left[ Z + \frac{\mathrm{i}\log 2}{\rm \pi} + O({\rm e}^{-{\rm \pi} Y}) \right] \quad \text{as } Y \to \infty. \end{equation}Taking the imaginary part then gives (7.30).
Appendix D. Derivation of (7.77)
In this appendix, the limit  $c\ll \epsilon$ is considered. Because of the expression in terms of
$c\ll \epsilon$ is considered. Because of the expression in terms of  $\cosh$ for
$\cosh$ for  $\hat {w}(0,y)$ derived in (7.74) and
$\hat {w}(0,y)$ derived in (7.74) and
 \begin{equation} \gamma = \cosh^{1/2}({\rm \pi} c/\epsilon) \sim 1+\frac{{\rm \pi}^2 c^2}{4\epsilon^2}, \quad \rho \sim \frac{{\rm \pi}^4 c^4}{196 \epsilon^4} \sim O(c^4/\epsilon^4), \end{equation}
\begin{equation} \gamma = \cosh^{1/2}({\rm \pi} c/\epsilon) \sim 1+\frac{{\rm \pi}^2 c^2}{4\epsilon^2}, \quad \rho \sim \frac{{\rm \pi}^4 c^4}{196 \epsilon^4} \sim O(c^4/\epsilon^4), \end{equation}expression (7.74) can be simplified to
 \begin{equation} \hat{w}(0,y) \sim-2\hat{A} \hat{Y}\sqrt{1-\hat{Y}^2},\quad (x,y) = (c\hat{X}, 1+c+c\hat{Y}). \end{equation}
\begin{equation} \hat{w}(0,y) \sim-2\hat{A} \hat{Y}\sqrt{1-\hat{Y}^2},\quad (x,y) = (c\hat{X}, 1+c+c\hat{Y}). \end{equation}
When the same limit is considered, the map  ${\mathcal {J}}(\zeta )$ in (7.71) is also simplified to
${\mathcal {J}}(\zeta )$ in (7.71) is also simplified to
 \begin{equation} {\mathcal{J}}(\zeta) =-\frac{1}{\rm \pi}\sin^{-1}\left[- \gamma\,\frac{{\rm \pi}^2 c^2-4\zeta + \epsilon^2{\rm \pi}^2c^2 \zeta^2 }{{\rm \pi}^2 c^2+4\zeta + \epsilon^2{\rm \pi}^2c^2\zeta^2 } \right]\sim-\frac{1}{2} + \frac{c}{2\epsilon}\,(\zeta+\zeta^{-1}-2)^{1/2}, \end{equation}
\begin{equation} {\mathcal{J}}(\zeta) =-\frac{1}{\rm \pi}\sin^{-1}\left[- \gamma\,\frac{{\rm \pi}^2 c^2-4\zeta + \epsilon^2{\rm \pi}^2c^2 \zeta^2 }{{\rm \pi}^2 c^2+4\zeta + \epsilon^2{\rm \pi}^2c^2\zeta^2 } \right]\sim-\frac{1}{2} + \frac{c}{2\epsilon}\,(\zeta+\zeta^{-1}-2)^{1/2}, \end{equation}which means
 \begin{equation} {\mathcal{J}}({\rm e}^{{\rm i}\theta}) \sim-\frac{1}{2} - \frac{c{\rm i}}{\epsilon} \sin \frac{\theta}{2}. \end{equation}
\begin{equation} {\mathcal{J}}({\rm e}^{{\rm i}\theta}) \sim-\frac{1}{2} - \frac{c{\rm i}}{\epsilon} \sin \frac{\theta}{2}. \end{equation}
By using the expressions above, the parameter  $\hat {A}$ in (7.75) is also approximated as follows:
$\hat {A}$ in (7.75) is also approximated as follows:
 \begin{align} \hat{A} &\sim \frac{2}{{\rm \pi} }\int_{0}^{\rm \pi}\left[-\tilde{g}({\mathcal{J}}({\rm e}^{{\rm i}\theta})) + \frac{\epsilon^2}{2{\rm i}}\left({\mathcal{J}}({\rm e}^{{\rm i} \theta}) + \frac{1}{2}\right) \right]\cos\theta \,{\rm d}\theta \end{align}
\begin{align} \hat{A} &\sim \frac{2}{{\rm \pi} }\int_{0}^{\rm \pi}\left[-\tilde{g}({\mathcal{J}}({\rm e}^{{\rm i}\theta})) + \frac{\epsilon^2}{2{\rm i}}\left({\mathcal{J}}({\rm e}^{{\rm i} \theta}) + \frac{1}{2}\right) \right]\cos\theta \,{\rm d}\theta \end{align} \begin{align} &\sim\frac{2}{\rm \pi}\left[-\int_{0}^{\rm \pi}\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2}{{\rm \pi}^3 n^3}\exp\left(-\frac{n{\rm \pi} c}{\epsilon} \sin\frac{\theta}{2} \right)\cos\theta \,{\rm d}\theta - \frac{c\epsilon}{2}\int_{0}^{\rm \pi} \sin\frac{\theta}{2}\cos\theta \,{\rm d}\theta \right] \end{align}
\begin{align} &\sim\frac{2}{\rm \pi}\left[-\int_{0}^{\rm \pi}\sum_{n=1,3,\ldots}^\infty \frac{4\epsilon^2}{{\rm \pi}^3 n^3}\exp\left(-\frac{n{\rm \pi} c}{\epsilon} \sin\frac{\theta}{2} \right)\cos\theta \,{\rm d}\theta - \frac{c\epsilon}{2}\int_{0}^{\rm \pi} \sin\frac{\theta}{2}\cos\theta \,{\rm d}\theta \right] \end{align} \begin{align} &=\frac{2}{\rm \pi}\left[ - \frac{8\epsilon^2}{{\rm \pi}^3}\int_{0}^1\sum_{n=1,3,\ldots}^\infty \frac{1}{n^3}\exp\left(-\frac{n{\rm \pi} ct}{\epsilon} \right) \frac{1-2t^2}{\sqrt{1-t^2}}\,{\rm d}t + \frac{c\epsilon}{3}\right] \end{align}
\begin{align} &=\frac{2}{\rm \pi}\left[ - \frac{8\epsilon^2}{{\rm \pi}^3}\int_{0}^1\sum_{n=1,3,\ldots}^\infty \frac{1}{n^3}\exp\left(-\frac{n{\rm \pi} ct}{\epsilon} \right) \frac{1-2t^2}{\sqrt{1-t^2}}\,{\rm d}t + \frac{c\epsilon}{3}\right] \end{align} \begin{align} &=\frac{2}{\rm \pi}\left[- \frac{8\epsilon^2}{{\rm \pi}^3}\int_{0}^1\left({\rm Li}_3({\rm e}^{-{\rm \pi} c t/\epsilon}) -\frac{1}{8}\,{\rm Li}_3({\rm e}^{-2{\rm \pi} c t/\epsilon}) \right)\frac{1-2t^2}{\sqrt{1-t^2}}\,{\rm d}t + \frac{c\epsilon}{3}\right] \end{align}
\begin{align} &=\frac{2}{\rm \pi}\left[- \frac{8\epsilon^2}{{\rm \pi}^3}\int_{0}^1\left({\rm Li}_3({\rm e}^{-{\rm \pi} c t/\epsilon}) -\frac{1}{8}\,{\rm Li}_3({\rm e}^{-2{\rm \pi} c t/\epsilon}) \right)\frac{1-2t^2}{\sqrt{1-t^2}}\,{\rm d}t + \frac{c\epsilon}{3}\right] \end{align} \begin{align} &\sim \frac{c^2}{8{\rm \pi}}\left[3 - 4\log\frac{{\rm \pi} c}{4\epsilon}\right], \end{align}
\begin{align} &\sim \frac{c^2}{8{\rm \pi}}\left[3 - 4\log\frac{{\rm \pi} c}{4\epsilon}\right], \end{align}
where  $\textrm {Li}_{3}$ is the trilogarithm function (Olver Reference Olver2010), and we have used the expansion
$\textrm {Li}_{3}$ is the trilogarithm function (Olver Reference Olver2010), and we have used the expansion
 \begin{align} &{\rm Li}_3({\rm e}^{-{\rm \pi} c t/\epsilon})-\frac{1}{8}\,{\rm Li}_3({\rm e}^{-{\rm \pi} c t/\epsilon}) \nonumber\\ &\quad \sim \frac{7}{8}\,\zeta(3) - \frac{{\rm \pi}^3 ct}{8\epsilon} +\frac{{\rm \pi}^2c^2t^2}{8\epsilon^2}\left(2\log\left(\frac{{\rm \pi} c t}{\epsilon} \right)- 3\right) + O(c^3/\epsilon^3). \end{align}
\begin{align} &{\rm Li}_3({\rm e}^{-{\rm \pi} c t/\epsilon})-\frac{1}{8}\,{\rm Li}_3({\rm e}^{-{\rm \pi} c t/\epsilon}) \nonumber\\ &\quad \sim \frac{7}{8}\,\zeta(3) - \frac{{\rm \pi}^3 ct}{8\epsilon} +\frac{{\rm \pi}^2c^2t^2}{8\epsilon^2}\left(2\log\left(\frac{{\rm \pi} c t}{\epsilon} \right)- 3\right) + O(c^3/\epsilon^3). \end{align}Using (D10), the last term of (3.9) becomes
 \begin{align} &\frac{1}{1+c}\int_{1}^{1+c}\left(1-\sum_{n=1,3,\ldots}^\infty \frac{8({\rm e}^{-n{\rm \pi} y/\epsilon} + {\rm e}^{n{\rm \pi}(y-1-c)/\epsilon})}{{\rm \pi}^2n^2 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}\right)\hat{w}(0,y)\,{\rm d} y \end{align}
\begin{align} &\frac{1}{1+c}\int_{1}^{1+c}\left(1-\sum_{n=1,3,\ldots}^\infty \frac{8({\rm e}^{-n{\rm \pi} y/\epsilon} + {\rm e}^{n{\rm \pi}(y-1-c)/\epsilon})}{{\rm \pi}^2n^2 (1+{\rm e}^{-n{\rm \pi}(1+c)/\epsilon})}\right)\hat{w}(0,y)\,{\rm d} y \end{align} \begin{align} &\quad\sim \frac{1}{1+c}\int_{-1}^0 \left(1 - \frac{8}{{\rm \pi}^2}\,{\rm Li}_2({\rm e}^{{\rm \pi} c \hat{Y}/\epsilon} ) +\frac{2}{{\rm \pi}^2}\,{\rm Li}_2({\rm e}^{2{\rm \pi} c \hat{Y}/\epsilon} ) \right)(-2\hat{A} \hat{Y}\sqrt{1-\hat{Y}^2})\,{\rm d}\hat{Y} \end{align}
\begin{align} &\quad\sim \frac{1}{1+c}\int_{-1}^0 \left(1 - \frac{8}{{\rm \pi}^2}\,{\rm Li}_2({\rm e}^{{\rm \pi} c \hat{Y}/\epsilon} ) +\frac{2}{{\rm \pi}^2}\,{\rm Li}_2({\rm e}^{2{\rm \pi} c \hat{Y}/\epsilon} ) \right)(-2\hat{A} \hat{Y}\sqrt{1-\hat{Y}^2})\,{\rm d}\hat{Y} \end{align} \begin{align} &\quad\sim\frac{c^4}{4{\rm \pi} \epsilon(1+c)}\left(\log\frac{4\epsilon}{{\rm \pi} c} + \frac{3}{4} \right)^2, \end{align}
\begin{align} &\quad\sim\frac{c^4}{4{\rm \pi} \epsilon(1+c)}\left(\log\frac{4\epsilon}{{\rm \pi} c} + \frac{3}{4} \right)^2, \end{align}
where  ${\rm Li}_2$ is the dilogarithm function (Olver Reference Olver2010), and we have used the asymptotic expansion of
${\rm Li}_2$ is the dilogarithm function (Olver Reference Olver2010), and we have used the asymptotic expansion of  ${\rm Li}_2({\rm e}^{{\rm \pi} c \hat {Y}/\epsilon })$.
${\rm Li}_2({\rm e}^{{\rm \pi} c \hat {Y}/\epsilon })$.


















































































 Open access
Open access