



No CrossRef data available.
Article contents
Nonlinear evolution of vortical disturbances entrained in the entrance region of a circular pipe
Published online by Cambridge University Press: 29 October 2024
Abstract
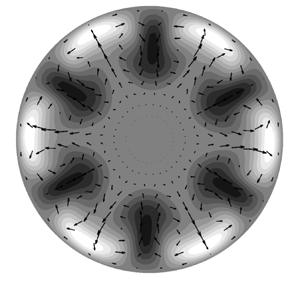
The nonlinear evolution of free-stream vortical disturbances entrained in the entrance region of a circular pipe is investigated using asymptotic and numerical methods. Attention is focused on the low-frequency disturbances that induce streamwise elongated structures. A pair of vortical modes with opposite azimuthal wavenumbers is used to model the free-stream disturbances. Their amplitude is assumed to be intense enough for nonlinear interactions to occur inside the pipe. The formation and evolution of the perturbation flow are described by the nonlinear unsteady boundary-region equations in the cylindrical coordinate system, derived and solved herein for the first time. Matched asymptotic expansions are employed to construct appropriate initial conditions and the initial–boundary value problem is solved numerically by a marching procedure in the streamwise direction. Numerical results show the stabilising effect of nonlinearity on the intense algebraic growth of the disturbances and an increase of the wall-shear stress due to the nonlinear interactions. A parametric study is carried out to evince the effect of the Reynolds number, the streamwise and azimuthal wavelengths, and the radial length scale of the inlet disturbance on the nonlinear flow evolution. Elongated pipe-entrance nonlinear structures (EPENS) occupying the whole pipe cross-section are discovered. EPENS with  $h$-fold rotational symmetry comprise
$h$-fold rotational symmetry comprise  $h$ high-speed streaks positioned near the wall, and
$h$ high-speed streaks positioned near the wall, and  $h$ low-speed streaks centred around the pipe core. These distinct structures display a striking resemblance to nonlinear travelling waves found numerically and observed experimentally in fully developed pipe flow. Good agreement of our mean-flow and root mean square data with experimental measurements is obtained.
$h$ low-speed streaks centred around the pipe core. These distinct structures display a striking resemblance to nonlinear travelling waves found numerically and observed experimentally in fully developed pipe flow. Good agreement of our mean-flow and root mean square data with experimental measurements is obtained.
- Type
- JFM Papers
- Information
- Copyright
- © The Author(s), 2024. Published by Cambridge University Press
References
Avila, M., Barkley, D. & Hof, B. 2023 Transition to turbulence in pipe flow. Annu. Rev. Fluid Mech. 55, 575–602.CrossRefGoogle Scholar
Batchelor, G.K. & Gill, A.E. 1962 Analysis of the stability of axisymmetric jets. J. Fluid Mech. 14, 529–551.CrossRefGoogle Scholar
Bergström, L. 1992 Initial algebraic growth of small angular dependent disturbances in pipe Poiseuille flow. Stud. Appl. Maths 87 (1), 61–79.CrossRefGoogle Scholar
Bergström, L. 1993 Optimal growth of small disturbances in pipe Poiseuille flow. Phys. Fluids A 5 (11), 2710–2720.CrossRefGoogle Scholar
Böberg, L. & Brösa, U. 1988 Onset of turbulence in a pipe. Z. Naturforsch. A 43 (8–9), 697–726.CrossRefGoogle Scholar
Borodulin, V.I., Ivanov, A.V., Kachanov, Y.S. & Roschektayev, A.P. 2021 Distributed vortex receptivity of a swept-wing boundary layer. Part 1. Efficient excitation of CF modes. J. Fluid Mech. 908, A14.CrossRefGoogle Scholar
Christiansen, E.B. & Lemmon, H.E. 1965 Entrance region flow. AIChE J. 11 (6), 995–999.CrossRefGoogle Scholar
Corcos, G.M. & Sellars, J.R. 1959 On the stability of fully developed flow in a pipe. J. Fluid Mech. 5 (1), 97–112.CrossRefGoogle Scholar
Crowder, H.J. & Dalton, C. 1971 On the stability of Poiseuille flow in a pipe. J. Comput. Phys. 7 (1), 12–31.CrossRefGoogle Scholar
Davey, A. 1978 On Itoh's finite amplitude stability theory for pipe flow. J. Fluid Mech. 86 (4), 695–703.CrossRefGoogle Scholar
Davey, A. & Drazin, P.G. 1969 The stability of Poiseuille flow in a pipe. J. Fluid Mech. 36 (2), 209–218.CrossRefGoogle Scholar
Davey, A. & Nguyen, H.P.F. 1971 Finite-amplitude stability of pipe flow. J. Fluid Mech. 45 (4), 701–720.CrossRefGoogle Scholar
Dietz, A.J. 1999 Local boundary-layer receptivity to a convected free-stream disturbance. J. Fluid Mech. 378, 291–317.CrossRefGoogle Scholar
Eckhardt, B., Schneider, T.M., Hof, B. & Westerweel, J. 2007 Turbulence transition in pipe flow. Annu. Rev. Fluid Mech. 39 (1), 447–468.CrossRefGoogle Scholar
Faisst, H. & Eckhardt, B. 2003 Traveling waves in pipe flow. Phys. Rev. Lett. 91 (22), 224502.CrossRefGoogle ScholarPubMed
Garg, V.K. 1981 Stability of developing flow in a pipe: non-axisymmetric disturbances. J. Fluid Mech. 110, 209–216.CrossRefGoogle Scholar
Garg, V.K. 1983 Stability of nonparallel developing flow in a pipe to nonaxisymmetric disturbances. J. Appl. Mech. 50 (1), 210–214.CrossRefGoogle Scholar
Garg, V.K. & Gupta, S.C. 1981 Stability of developing flow in a pipe – nonparallel effects. J. Appl. Mech. 48 (2), 243.CrossRefGoogle Scholar
Garg, V.K. & Rouleau, W.T. 1972 Linear spatial stability of pipe Poiseuille flow. J. Fluid Mech. 54 (1), 113–127.CrossRefGoogle Scholar
Gill, A.E. 1965 On the behaviour of small disturbances to Poiseuille flow in a circular pipe. J. Fluid Mech. 21 (1), 145–172.CrossRefGoogle Scholar
Graham, M.D. & Floryan, D. 2021 Exact coherent states and the nonlinear dynamics of wall-bounded turbulent flows. Annu. Rev. Fluid Mech. 53, 227–253.CrossRefGoogle Scholar
Gupta, S.C. & Garg, V.K. 1981 Effect of velocity distribution on the stability of developing flow in a pipe. Phys. Fluids 24 (4), 576–578.CrossRefGoogle Scholar
Hagen, G. 1839 Ueber die bewegung des wassers in engen cylindrischen röhren. Ann. Phys. 122 (3), 423–442.CrossRefGoogle Scholar
Hof, B., van Doorne, C.W.H., Westerweel, J. & Nieuwstadt, F.T.M. 2005 Turbulence regeneration in pipe flow at moderate Reynolds numbers. Phys. Rev. Lett. 95 (21), 214502.CrossRefGoogle ScholarPubMed
Hof, B., van Doorne, C.W.H., Westerweel, J., Nieuwstadt, F.T.M., Faisst, H., Eckhardt, B., Wedin, H., Kerswell, R.R. & Waleffe, F. 2004 Experimental observation of nonlinear traveling waves in turbulent pipe flow. Science 305 (5690), 1594–1598.CrossRefGoogle ScholarPubMed
Hornbeck, R.W. 1964 Laminar flow in the entrance region of a pipe. Appl. Sci. Res. 13, 224–232.CrossRefGoogle Scholar
Huang, L.M. & Chen, T.S. 1974 a Stability of the developing laminar pipe flow. Phys. Fluids 17 (1), 245–247.CrossRefGoogle Scholar
Huang, L.M. & Chen, T.S. 1974 b Stability of developing pipe flow subjected to non-axisymmetric disturbances. J. Fluid Mech. 63 (1), 183–193.CrossRefGoogle Scholar
Itoh, N. 1977 Nonlinear stability of parallel flows with subcritical Reynolds numbers. Part 2. Stability of pipe Poiseuille flow to finite axisymmetric disturbances. J. Fluid Mech. 82 (3), 469–479.CrossRefGoogle Scholar
Kerswell, R.R. 2005 Recent progress in understanding the transition to turbulence in a pipe. Nonlinearity 18 (6), R17.CrossRefGoogle Scholar
Kerswell, R.R. 2018 Nonlinear nonmodal stability theory. Annu. Rev. Fluid Mech. 50 (1), 319–345.CrossRefGoogle Scholar
Kerswell, R.R., Pringle, C.C.T. & Willis, A.P. 2014 An optimization approach for analysing nonlinear stability with transition to turbulence in fluids as an exemplar. Rep. Prog. Phys. 77 (8), 085901.CrossRefGoogle ScholarPubMed
Kerswell, R.R. & Tutty, O.R. 2007 Recurrence of travelling waves in transitional pipe flow. J. Fluid Mech. 584, 69–102.CrossRefGoogle Scholar
Khorrami, M.R., Malik, M.R. & Ash, R.L. 1989 Application of spectral collocation techniques to the stability of swirling flows. J. Comput. Phys. 81 (1), 206–229.CrossRefGoogle Scholar
Langhaar, H.L. 1942 Steady flow in the transition length of a straight tube. J. Appl. Mech. 9 (2), A55–A58.CrossRefGoogle Scholar
Leib, S.J., Wundrow, D.W. & Goldstein, M.E. 1999 Effect of free-stream turbulence and other vortical disturbances on a laminar boundary layer. J. Fluid Mech. 380, 169–203.CrossRefGoogle Scholar
Lewis, H.R. & Bellan, P.M. 1990 Physical constraints on the coefficients of Fourier expansions in cylindrical coordinates. J. Math. Phys. 31 (11), 2592–2596.CrossRefGoogle Scholar
Marensi, E. & Ricco, P. 2017 Growth and wall-transpiration control of nonlinear unsteady Görtler vortices forced by free-stream vortical disturbances. Phys. Fluids 29 (11), 114106.CrossRefGoogle Scholar
Marensi, E., Ricco, P. & Wu, X. 2017 Nonlinear unsteady streaks engendered by the interaction of free-stream vorticity with a compressible boundary layer. J. Fluid Mech. 817, 80–121.CrossRefGoogle Scholar
Matsubara, M. & Alfredsson, P.H. 2001 Disturbance growth in boundary layers subjected to free-stream turbulence. J. Fluid Mech. 430, 149–168.CrossRefGoogle Scholar
Meseguer, A. & Trefethen, L.N. 2003 Linearized pipe flow to Reynolds number 107. J. Comput. Phys. 186 (1), 178–197.CrossRefGoogle Scholar
O'Sullivan, P.L. & Breuer, K.S. 1994 Transient growth in circular pipe flow. I. Linear disturbances. Phys. Fluids 6 (11), 3643–3651.CrossRefGoogle Scholar
Patera, A.T. & Orszag, S.A. 1981 Finite-amplitude stability of axisymmetric pipe flow. J. Fluid Mech. 112, 467–474.CrossRefGoogle Scholar
Pekeris, C.L. 1948 Stability of the laminar flow through a straight pipe of circular cross-section to infinitesimal disturbances which are symmetrical about the axis of the pipe. Proc. Natl Acad. Sci. 34 (6), 285–295.CrossRefGoogle ScholarPubMed
Pfenniger, W. 1961 Transition in the inlet length of tubes at high Reynolds numbers. Boundary Layer Flow Control (ed. G.V. Lachman), pp. 970–980. Cambridge University Press.Google Scholar
Poiseuille, J.L. 1844 Recherches expérimentales sur le mouvement des liquides dans les tubes de très-petits diamètres. Imprimerie Royale.Google Scholar
Pringle, C.C.T., Duguet, Y. & Kerswell, R.R. 2009 Highly symmetric travelling waves in pipe flow. Phil. Trans. R. Soc. A 367 (1888), 457–472.CrossRefGoogle ScholarPubMed
Pringle, C.C.T. & Kerswell, R.R. 2007 Asymmetric, helical, and mirror-symmetric traveling waves in pipe flow. Phys. Rev. Lett. 99 (7), 074502.CrossRefGoogle ScholarPubMed
Pringle, C.C.T. & Kerswell, R.R. 2010 Using nonlinear transient growth to construct the minimal seed for shear flow turbulence. Phys. Rev. Lett. 105, 154502.CrossRefGoogle ScholarPubMed
Pringle, C.C.T., Willis, A.P. & Kerswell, R.R. 2012 Minimal seeds for shear flow turbulence: using nonlinear transient growth to touch the edge of chaos. J. Fluid Mech. 702, 415–443.CrossRefGoogle Scholar
Rayleigh, Lord 1892 On the question of the stability of the flow of fluids. Phil. Mag. 34 (206), 59–70.CrossRefGoogle Scholar
Reshotko, E. & Tumin, A. 2001 Spatial theory of optimal disturbances in a circular pipe flow. Phys. Fluids 13 (4), 991–996.CrossRefGoogle Scholar
Reynolds, O. 1883 XXIX. An experimental investigation of the circumstances which determine whether the motion of water shall be direct or sinuous, and of the law of resistance in parallel channels. Phil. Trans. R. Soc. (174), 935–982.Google Scholar
Ricco, P. & Alvarenga, C. 2021 Entrainment and growth of vortical disturbances in the channel-entrance region. J. Fluid Mech. 927, A18.CrossRefGoogle Scholar
Ricco, P. & Alvarenga, C. 2022 Growth of vortical disturbances entrained in the entrance region of a circular pipe. J. Fluid Mech. 932, A16.CrossRefGoogle Scholar
Ricco, P., Luo, J. & Wu, X. 2011 Evolution and instability of unsteady nonlinear streaks generated by free-stream vortical disturbances. J. Fluid Mech. 677, 1–38.CrossRefGoogle Scholar
Salwen, H. & Grosch, C.E. 1972 The stability of Poiseuille flow in a pipe of circular cross-section. J. Fluid Mech. 54 (1), 93–112.CrossRefGoogle Scholar
Sarpkaya, T. 1975 A note on the stability of developing laminar pipe flow subjected to axisymmetric and non-axisymmetric disturbances. J. Fluid Mech. 68 (2), 345–351.CrossRefGoogle Scholar
Schmid, P.J. 2007 Nonmodal stability theory. Annu. Rev. Fluid Mech. 39 (1), 129–162.CrossRefGoogle Scholar
Schmid, P.J. & Henningson, D.S. 1994 Optimal energy density growth in Hagen–Poiseuille flow. J. Fluid Mech. 277, 197–225.CrossRefGoogle Scholar
Sexl, T. 1927 Zur stabilitätsfrage der Poiseuilleschen und Couetteschen strömung. Ann. Phys. 388 (14), 835–848.CrossRefGoogle Scholar
Shen, F.C.T., Chen, T.S. & Huang, L.M. 1976 The effects of main-flow radial velocity on the stability of developing laminar pipe flow. J. Appl. Mech. 43 (2), 209–212.CrossRefGoogle Scholar
da Silva, D.F. & Moss, E.A. 1994 The stability of pipe entrance flows subjected to axisymmetric disturbances. J. Fluids Engng 116 (1), 61–65.CrossRefGoogle Scholar
Smith, F.T. & Bodonyi, R.J. 1982 Amplitude-dependent neutral modes in the Hagen–Poiseuille flow through a circular pipe. Proc. R. Soc. Lond. A 384 (1787), 463–489.Google Scholar
Sparrow, E.M., Lin, S.H. & Lundgren, T.S. 1964 Flow development in the hydrodynamic entrance region of tubes and ducts. Phys. Fluids 7 (3), 338–347.CrossRefGoogle Scholar
Tatsumi, T. 1952 Stability of the laminar inlet-flow prior to the formation of Poiseuille regime, II. J. Phys. Soc. Japan 7 (5), 495–502.CrossRefGoogle Scholar
Tuckerman, L.S. 1989 Divergence-free velocity fields in nonperiodic geometries. J. Comput. Phys. 80 (2), 403–441.CrossRefGoogle Scholar
Tumin, A. 1996 Receptivity of pipe Poiseuille flow. J. Fluid Mech. 315, 119–137.CrossRefGoogle Scholar
Waleffe, F. 1997 On a self-sustaining process in shear flows. Phys. Fluids 9 (4), 883–900.CrossRefGoogle Scholar
Wedin, H. & Kerswell, R.R. 2004 Exact coherent structures in pipe flow: travelling wave solutions. J. Fluid Mech. 508, 333–371.CrossRefGoogle Scholar
Willis, A.P., Duguet, Y., Omel'chenko, O. & Wolfrum, M. 2017 Surfing the edge: using feedback control to find nonlinear solutions. J. Fluid Mech. 831, 579–591.CrossRefGoogle Scholar
Willis, A.P. & Kerswell, R.R. 2008 Coherent structures in localized and global pipe turbulence. Phys. Rev. Lett. 100 (12), 124501.CrossRefGoogle ScholarPubMed
Wu, X., Moin, P. & Adrian, R.J. 2020 Laminar to fully turbulent flow in a pipe: scalar patches, structural duality of turbulent spots and transitional overshoot. J. Fluid Mech. 896, A9.CrossRefGoogle Scholar
Wu, X., Moin, P., Adrian, R.J. & Baltzer, J.R. 2015 Osborne Reynolds pipe flow: direct simulation from laminar through gradual transition to fully developed turbulence. Proc. Natl Acad. Sci. 112 (26), 7920–7924.CrossRefGoogle ScholarPubMed
Wygnanski, I.J. & Champagne, F.H. 1973 On transition in a pipe. Part 1. The origin of puffs and slugs and the flow in a turbulent slug. J. Fluid Mech. 59 (2), 281–335.CrossRefGoogle Scholar
Wygnanski, I., Sokolov, M. & Friedman, D. 1975 On transition in a pipe. Part 2. The equilibrium puff. J. Fluid Mech. 69 (2), 283–304.CrossRefGoogle Scholar
Zanoun, E.-S., Kito, M. & Egbers, C. 2009 A study on flow transition and development in circular and rectangular ducts. J. Fluids Engng 131 (6), 061204.CrossRefGoogle Scholar