

Robots made from soft materials have potential for use in applications that require high adaptability and conformability, or close interactions with humans. To achieve this, soft robotic actuators need to replicate the diverse capabilities and performance of natural muscles, which include high speed, power, strength, efficiency, and the ability to self-heal. Existing soft robotic systems—based on fluidic, thermal, or dielectric elastomer actuators—might exhibit outstanding performance according to certain metrics, but have critical limitations in others. To address this issue, the research team of Christoph Keplinger, a professor at the University of Colorado Boulder, has introduced a versatile actuation technology that combines high strains (>100%), high strength (0.3 MPa), high speed (>50 Hz), long lifetime (>1 million cycles), self-healing, and self-sensing capabilities. These artificial muscles, called hydraulically amplified self-healing electrostatic (HASEL) actuators, are promising especially for advancements in soft robotics.
HASEL actuators consist of a stretchable or flexible shell filled with a liquid dielectric, a vegetable oil. Electrodes, which can be made from conductive hydrogels, cover parts of the shell. When a voltage is applied to the electrodes, electrostatic forces displace the liquid deforming the soft shell. This coupling between electrostatic and hydraulic forces allows for a variety of actuation modes.
As a first design, donut-type HASEL actuators have a disc-shaped shell with electrodes located at the center (see Figure a). When a voltage is applied, the liquid is pushed to the outer region of the shell, causing a local increase in thickness. This transition from disc to donut occurs rapidly as the result of a “pull-in” instability triggered by an imbalance between the electrostatic and mechanical restoring forces. A 5-cm round disc-shaped HASEL actuator is already able to lift 150 g repeatedly over a million cycles.
A planar-type HASEL actuator is another design explored by the research team, where the electrodes cover the entire surface of the shell. When voltage is applied, the actuator reduces in thickness and expands in width. Scaling up these devices, heavy objects such as a 4-kg jug of water can be lifted (see Figure b).
In addition to the mechanical performance, what makes the technology unique is the capacity of the actuator for self-healing and self-sensing. Under high electric fields, dielectric breakdown can occur. Instead of creating a permanent conducting path between the electrodes, the liquid dielectric simply reflows and returns to an insulating state. This way, the liquid dielectric can self-heal from 50 cycles of dielectric breakdown with “the 50th breakdown event occurring at a higher voltage than the 1st breakdown event,” observes Eric Acome, the lead author of the article published in a recent issue of Science (doi:10.1126/science.aao6139). Furthermore, measure of the capacitance between the two electrodes provides self-sensing capability and can be used to monitor deformations and position without external sensors, in a closed-loop actuation control.
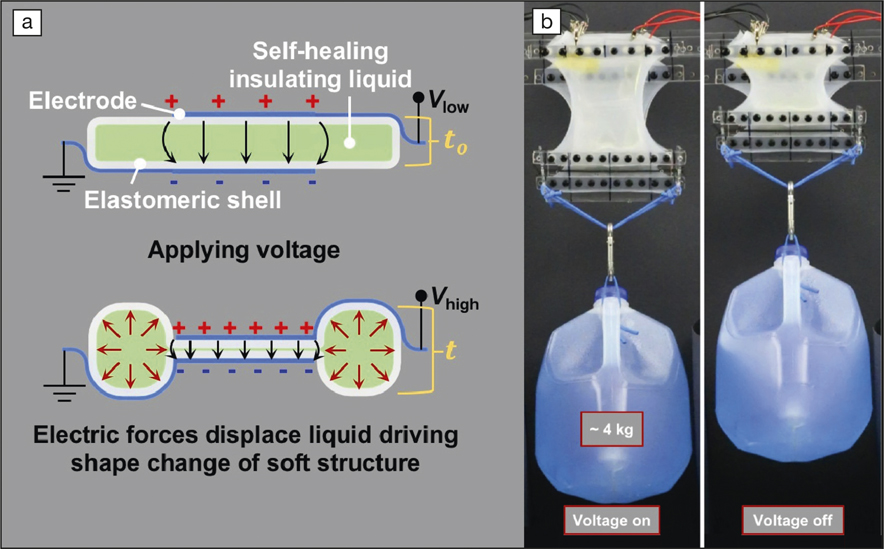
Hydraulically amplified self-healing electrostatic (HASEL) actuation principle (a) used to deliver high forces (b). Credit: Science.
“This work opens exciting new possibilities for soft actuation. [The self-healing capabilities of HASEL actuators] make them more practical for applications in robotics where the life cycle of components is important,” says Pablo Valdivia y Alvarado, a professor at the Singapore University of Technology and Design who was not involved in this study. Exploring new approaches to design and fabricate actuation, locomotion, and sensing mechanisms for bioinspired, multifunctional, and passive robots, he points out that “HASEL actuators can provide strains and operational bandwidths large enough for applications where mimicry of biological motion is sought.”
To exploit and further demonstrate the potential and diversity of the HASEL technology, Keplinger’s research team created so-called “Peano-HASEL” actuators—published in Science Robotics (doi:10.1126/scirobotics.aar3276)—that can be scaled up for increased force; are able to achieve precise movements; and by using the adequate index-matching liquid, they can even be made transparent. Keplinger’s team is currently investigating ways to reduce the voltage required for operation and to further improve performance. In the future, the research group hopes to enable the use of compact and portable electronics to control complex movements from arrays of such actuators.
