



No CrossRef data available.
Published online by Cambridge University Press: 14 August 2024
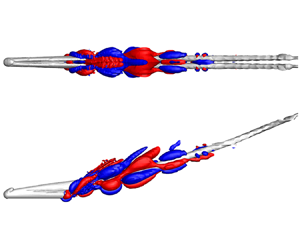
Previous studies have shown that low-frequency vortex oscillations occur around a hemisphere–cylinder body at different angles of attack, but the underlying mechanism is still unclear. In this study, we examine the origin of the vortex oscillation using numerical simulations and global linear stability analysis. The vortex oscillation is reproduced using numerical simulations, and the oscillatory modes are computed through dynamic mode decomposition (DMD). We obtain the base flow through a selective frequency damping method, which exhibits a pair of steady leeward vortices over the body. The four unstable modes are computed using a modified Arnoldi iteration. The antisymmetric mode with a Strouhal number of 0.105 is discovered to be responsible for the alternate oscillation of the vortex pair, and the mode with a Strouhal number of 0.220 corresponds to the in-phase vortex oscillation. Their frequencies have good agreement with the modes of DMD. The other two unstable modes with higher frequencies, one antisymmetric and one symmetric, are harmonic frequencies of the above two modes. The study conclusively verifies that the vortex oscillation over a hemisphere–cylinder body originates from a global flow instability.