



1. Introduction
The idea of “place” is important for foreign language (FL) learning, since places in real-life settings provide rich context for not just linguistic knowledge but also social and cultural aspects in the target language (TL) environments (Holden & Sykes, Reference Holden and Sykes2011). Learning in a particular place can comprise a unique, memorable, and motivating experience that is difficult to replicate elsewhere (McClain, Reference McClain2016). Meanwhile, many places remain inaccessible to learners due to time, financial, physical, and political constraints.
In order to help FL learners gain access to given places in TL countries, our previous studies (Liao & Lu, Reference Liao and Lu2018; Liao, Lu, Masters, Dudek & Zhou, Reference Liao, Lu, Masters, Dudek and Zhou2022) proposed a solution called telepresence-place-based foreign language learning (TPFLL), in which telepresence robots are used to simulate the experience of being in a TL environment and, in that way, virtually support more immersive learning experiences. The term “telepresence” refers to technologies that provide remote users with the feeling of being present at another location (Minsky, Reference Minsky1980). Telepresence robots allow users in one location to control the movement and camera angle of a robot at another site, thus providing an FL learner with the ability to explore the environment around the robot and communicate with first language (L1) users at that location.
In this study, we further examine the influence of place by using the theoretical lens of meaning-focused instruction and geosemiotics. The findings may enhance our understanding of the sense-making process and help guide the design of telepresence robots and associated teaching activities for FL instructional use.
2. Literature review
2.1 FL learning via telepresence robots
Robot-assisted language learning has gained more attention among educators and researchers in recent decades, with most studies focusing on the use of artificial-intelligence robots as learning partners or teachers (Hong, Huang, Hsu & Shen, Reference Hong, Huang, Hsu and Shen2016; Mazzoni & Benvenuti, Reference Mazzoni and Benvenuti2015). However, Kwok (Reference Kwok2015) found that students preferred a human teacher to a robot teacher because humans could understand their complex needs and were better able to communicate with them naturally and dynamically.
Telepresence robots allow a remote learner or teacher to move the robot around at a given place and to have live-streamed communication with people at that site. Tanaka, Takahashi, Matsuzoe, Tazawa and Morita (Reference Tanaka, Takahashi, Matsuzoe, Tazawa and Morita2013) explored the use of child-operated telepresence robot systems in international communication between distant classrooms and reported that telepresence robots, particularly those equipped with two mechanical arms, could effectively support remote communication. Other studies have been conducted to compare learning mediated by telepresence robots and by other computer-mediated communication technologies (e.g. videoconferencing) or mobile devices. For example, Bell, Cain, Peterson and Cheng (Reference Bell, Cain, Peterson and Cheng2016) compared the use of telepresence robots and mobile devices, such as iPads, in remote teaching. Their results showed that the local teacher and students using telepresence robots enjoyed greater freedom than those using mobile devices as they did not need to hold a device during class. Additionally, the telepresence robots also provided better personalized learning experiences and social presence for the remote students as they could control their view angle based on their individual needs. Tanaka, Takahashi, Matsuzoe, Tazawa and Morita (Reference Tanaka, Takahashi, Matsuzoe, Tazawa and Morita2014) further compared the behavior of children in Japan who used either a videoconferencing tool (e.g. Skype) or a telepresence robot to communicate with an English teacher in Australia. The results showed that children using telepresence robots were less likely to “freeze” when communicating with the English teacher than those using Skype.
However, existing research has focused mainly on classroom contexts (cf. Tanaka et al., Reference Tanaka, Takahashi, Matsuzoe, Tazawa and Morita2013, Reference Tanaka, Takahashi, Matsuzoe, Tazawa and Morita2014), although the mobility of telepresence robots makes it possible to create learning environments outside of classrooms. In order to engage FL learners with real-life contexts, Liao and Lu (Reference Liao and Lu2018) examined the perceived benefits and challenges of using Romo, a small telepresence robot, for FL learning outdoors. Three adult FL learners in China piloted the robot around the campus of a large public university in the Eastern United States. The instructor played the role of a tour guide, discussing objects and activities around one of the campus’s main buildings with the learner. The results showed that the telepresence robot provided a more authentic learning environment than other technologies like virtual reality. The environment also motivated the learners and the instructor to generate more conversational topics. However, some learners had difficulty with the impromptu topics that would emerge from natural conversation.
To address these problems, a second study (Liao et al., Reference Liao, Lu, Masters, Dudek and Zhou2022) framed FL learning via telepresence robots outside classrooms as TPFLL and proposed three principles to guide the design of learning activities: (1) situate the learning in real-life settings, (2) scaffold the learning process, and (3) enhance learner agency. A case study was conducted to examine the applicability of these principles at an arboretum on the campus of a large public university in the Eastern United States. The results showed that these three principles could effectively improve FL learners’ learning experience.
2.2 Form-focused and meaning-focused language instruction approaches
It is important to distinguish FL instruction approaches that focus more on linguistic forms or meaning to understand the design and process of TPFLL. Focus on forms (FoFs) is an FL instruction approach in which the learning goals are divided into units such as phonemes, vocabulary, intonation patterns, and grammar (Schmidt, Reference Schmidt and Schmidt1995). These units are presented to FL learners in a predetermined sequence based on the difficulty of the learning goals. FL learners learn and practice the units consciously, such as by discussing grammar rules, memorizing dialogs, comparing the FL with their native language, and making error corrections. Another relevant instructional method, focus on form (FoF), draws learners’ attention to linguistic elements, such as vocabulary or grammar, during a communicative activity (Doughty & Williams, Reference Doughty, Williams, Doughty and Williams1998; Loewen, Reference Loewen and Liontas2018; Long & Robinson, Reference Long, Robinson, Doughty and Williams1998). Compared to FoFs, FoF has been shown to be more effective for vocabulary and grammar as learning such linguistic elements in context involves deeper levels of processing (Saeidi, Zaferanieh & Shatery, Reference Saeidi, Zaferanieh and Shatery2012). Although these approaches can prepare FL learners well for FL tests, it has been found that FL learners who focus only on discrete vocabulary and grammar have trouble using the linguistic knowledge appropriately in spontaneous interaction in real conversational situations. Communication in real-life settings not only necessitates discrete linguistic knowledge but also requires the learners to be exposed to and practice the language in a given social and cultural context (Savignon, Reference Savignon, Liontas and DelliCarpini2017).
In contrast, the focus on meaning (FoM) approach, or meaning-focused language instruction, involves FL learners in rich and meaningful use of the TL in real-life contexts (e.g. Celik, Reference Celik2019; Long & Robinson, Reference Long, Robinson, Doughty and Williams1998). This approach is based on the idea that people learn an FL by following the principles of learning their mother tongue (Krashen & Terrell, Reference Krashen and Terrell1985; Long & Robinson, Reference Long, Robinson, Doughty and Williams1998). Accordingly, the purpose of meaning-focused language instruction is not to learn the language forms based on a structured syllabus, but to improve communicative language use in real-life contexts (Celik, Reference Celik2019). In addition, without a fixed syllabus, meaning-focused language instruction can motivate FL learners by catering to their individual needs with adaptive content (Celik, Reference Celik2019).
To date, the FoM approach has been used in various technology-rich learning settings, such as those employing desktop videoconferences (Slaughter, Smith & Hajek, Reference Slaughter, Smith and Hajek2019; Wigham & Satar, Reference Wigham and Satar2021), mobile language learning (Fang, Yeh, Luo & Chen, Reference Fang, Yeh, Luo and Chen2021; Gao & Shen, Reference Gao and Shen2021), and virtual reality (Peterson, Reference Peterson2012). In our previous studies (Liao & Lu, Reference Liao and Lu2018; Liao et al., Reference Liao, Lu, Masters, Dudek and Zhou2022), the FL learning activities using telepresence robots also had an FoM design because the telepresence robots allowed the remote FL learners to control the robots to move around at a remote place outside classrooms and have a conversation with L1 users at that location. The results of the previous studies show that the environment at the remote location provides rich context for naturalistic conversation and a meaning-focused language instruction based on the report of the learners in the interview.
2.3 Geosemiotics
The term “geosemiotics” was proposed by Scollon and Scollon (Reference Scollon and Scollon2003) for studying “discourses in place” (p. 2). Although most geosemiotics studies investigated how places influence the design and meaning of signs, such as advertisements, posters (Scollon & Scollon, Reference Scollon and Scollon2003), road signs (Hamid, Reference Hamid2015), and signs in foodscapes (Abas, Reference Abas2019), some geosemiotics studies have expanded discourses to include speaking, writing, and behaviors in either physical or virtual places. For instance, Bortoluzzi and Trevisan (Reference Bortoluzzi, Trevisan, Vasta and Caldas-Coulthard2009) explored how Second Life, an online virtual environment, shaped e-users’ identity by analyzing such forms of discourse as chatting via a keyboard, speaking through a microphone, and looking at images on the walls in the virtual environment. Wohlwend, Vander Zanden, Husbye and Kuby (Reference Wohlwend, Vander Zanden, Husbye and Kuby2011) used the framework of geosemiotics to investigate the web play of children in Webkinz, a virtual online community for kids who have bought Webkinz toys. Moreover, Pierce (Reference Pierce2012) examined how the setting and materials such as desks, bookshelves, and PowerPoint slides influence the interactions among students and the teacher in an ESL classroom.
A core concept in geosemiotics is indexicality. The term as originally used refers to how the meaning of words such as “this,” “here,” and “now” will be shaped by the spatial, temporal, and social contexts of the language (e.g. Hodges, Whitten, Webb & Horner, Reference Hodges, Whitten, Webb and Horner1986). Scollon and Scollon (Reference Scollon and Scollon2003) expanded their interests in indexicality from pronouns and adverbs to general discourse. They systematically studied the factors that influence the meaning of signs in a specific place and proposed a semiotic aggregate framework, including three semiotic systems: interaction order, visual semiotics, and place semiotics.
Interaction order refers to “the current, ongoing, ratified (but also contested and denied) set of social relationships we take up and try to maintain with the other people who are in our presence” (Scollon & Scollon, Reference Scollon and Scollon2003, p. 16) – in other words, the social relationships of people with different social roles at a place. For instance, an old man who kneels on a street with a hat in front of him plays the social role of beggar. Another man giving money to the beggar plays the role of philanthropist. The social roles of the people and their relationships influence what and how they will interact. Scollon and Scollon (Reference Scollon and Scollon2003) also claim that the social roles will be influenced by the interpersonal distance of the people, the people’s appearance and behavior (personal front), and the unit of people (single, one person with another, etc.) at a given place.
Visual semiotics refers to “all of the ways in which meaning is structured within our visual fields” (Scollon & Scollon, Reference Scollon and Scollon2003, p. 11) – that is, the way discourse or materials are presented will influence the meaning of the discourse. For example, the layout of signs influences the meaning of the text in the signs. Lou (Reference Lou2017) further included a person’s eye/body vectors and body movement in visual semiotics, since eye gazing, body posture, and body movement have certain implicit meanings in a given context and can be visually perceived by the individuals at that setting (Satar, Reference Satar2013, Reference Satar2016).
The third semiotic system is place semiotics, which is used to connect spatial organization with language use at given places (Lou, Reference Lou2015; Scollon & Scollon, Reference Scollon and Scollon2003). Places are classified as either public/frontstage spaces or private/backstage spaces. Public spaces are further classified as exhibit/display, passage, special use, or secure, based on the functions of the space. Similarly, discourses can be further classified as contextual, decontextualized, or transgressive by examining the match between the places and the discourses.
In addition, Scollon and Scollon (Reference Scollon and Scollon2003) claimed that the discourses are highly relevant to the social actions of the people at a given place. Social actions are behaviors of people who play different social roles at a place. For instance, again, a beggar in a street might ask passers-by for money or food. The discourse of asking and the actions of begging are then socially connected.
Although existing geosemiotics studies have examined how semiotic resources can be applied in various settings, few studies have investigated the influence of outdoor places in language acquisition. In this study, the discourses and the social actions between FL learners and the instructor in TPFLL activities will be analyzed through a lens of geosemiotics analysis for understanding the meaning-making process in an FoM approach to instruction. The results of the study are also expected to provide insights on the design of TPFLL activities. Specifically, the research questions of the study are as follows:
-
1. How do the three semiotic systems and social actions in geosemiotics shape the discourse and the meaning-making process in TPFLL activities?
-
2. What are the appropriate instructional strategies at different places to support the meaning-making process of TPFLL activities?
-
3. What principles can be proposed to improve the design of the telepresence robot for facilitating the meaning-making process at different places in TPFLL activities?
3. Methodology
3.1 Participants
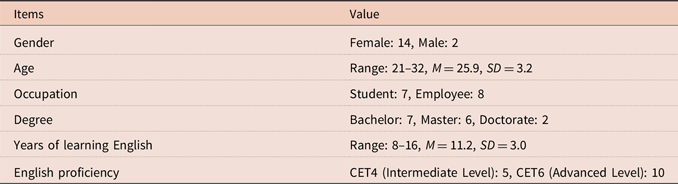
Five L1 English speakers were recruited as instructors from a university in the United States; three were doctoral students in the Department of Applied Linguistics and the other two were doctoral students in the College of Education. All of them had teaching experience, and four of them had FL teaching experience. We purposefully recruited instructors with teaching experience, as teaching skills such as time management would be generally helpful for the instruction activities. Furthermore, our previous findings (Liao & Lu, Reference Liao and Lu2018; Liao et al., Reference Liao, Lu, Masters, Dudek and Zhou2022) showed that meaning-focused instruction outside the classroom benefits from skills in scaffolding learners to understand the meanings of new expressions during interaction. Sixteen adult FL learners in China were recruited by sending a recruitment letter to college students at a university in China and working professionals in the researchers’ social network via email and WeChat, an online communication tool. The demographic information of the learners is described in Table 1. Of the 16 participants, 15 provided demographic information, and one male learner participated in the learning activity but did not complete the information. All names are pseudonyms.
Table 1. Demographic information of the learners
3.2 Design of the TPFLL activity
The site of the study was a botanic garden located on the campus of a university in North America. The site was selected for two reasons. First, the garden provided the learners with a variety of FL learning opportunities relevant to the natural features and social events of the garden. The garden’s natural features include a fountain, a gate, a bamboo walk, a stone sculpture sundial, a “witness tree” (the first tree planted in the garden), a central event lawn, and a pavilion, as well as trees and flowers along the touring route (see Figure 1). The garden is also a social gathering space for students and community members for casual (e.g. picnics) and formal events (e.g. weddings). Second, the garden provided even and uninterrupted paved paths without the dangers of normal street traffic, such as curbs, intersections, and heavy pedestrian use, enabling the user to easily control the telepresence robot to move it around the garden.

Figure 1. Features and the route at the Arboretum
A Keebot, a mid-size telepresence robot, was used in the learning activities. FL learners in China can remotely connect to the telepresence robot via the internet by using an app on a mobile device. Nine learners used an iPhone, one used an iPad, and five used an Android phone. The instructors and the robot were located at the learning site, the arboretum at the university. Figure 2 shows a remote FL learner communicating with an instructor at the arboretum via the Keebot. The telepresence robot was connected to the internet over either 4G or the Wi-Fi provided by the garden.

Figure 2. Communication with foreign language learners in China via a telepresence robot
The design of the learning activity followed the principles of an FoM instruction approach: (1) the learning goal was to expose the learners to the naturalistic use of English at the arboretum, with conversational topics arising naturally and spontaneously based on the real objects, buildings, or social activities in the arboretum; (2) the content of the conversation could be flexibly adjusted to meet the learner’s interests, background, and language skills; and (3) the instructor supported the learners in understanding the conversation and expressing their thoughts in English when difficulties arose. The study also partly adopted the FoF instruction approach for vocabulary learning, as the instructor helped the learners understand the meanings of new words and expressions in an unobtrusive way within the communicative context. However, language forms were not the main focus of the activity, and instructors were asked to only correct learners’ grammar errors that could lead to miscommunication.
During the activities, the instructor played the role of a tour guide first to introduce garden features to the learner, as the learner controlled the robot walking around in the garden. The instructor and the learner then had further discussions based on the learner’s interests and background. Finally, the learners debriefed by discussing what they had learned at the end of the activity. Each activity session lasted about one hour.
3.3 Data collection and analysis
Demographic information was collected via a supplemental website before the learning activities began. Two video cameras were used to record the 16 sessions of activities; one was installed on the robot to capture video from the learner’s perspective, while the other was held by the researcher to capture the activity of both the learner (as seen on the robot’s screen) and the instructor. The researcher followed closely behind the instructor and the Keebot, but out of sight from the learner as much as possible.
After collecting the videos, the researcher viewed all videos shot from the learner perspectives in InqScribe, a video transcription tool. Memos were written while watching the videos to build connections between the video clips and the geosemiotics framework for analysis. The social actions such as demonstrating pumpkins and carving pumpkin faces were noted in detail. Then the instructor’s and the learner’s social roles such as tour guide and pumpkin carver were identified based on the social actions. In addition, the instructor’s salient body language, gestures, and the layout of objects and the instructor in the learner view were written in the memos to make connections with visual semiotics. After all memos had been written, the different areas at the arboretum were identified as different space types in place semiotics. The discourse patterns were then extracted for each space type based on the discourse’s geosemiotic features in interaction order, visual semiotics, and social actions.
4. Findings
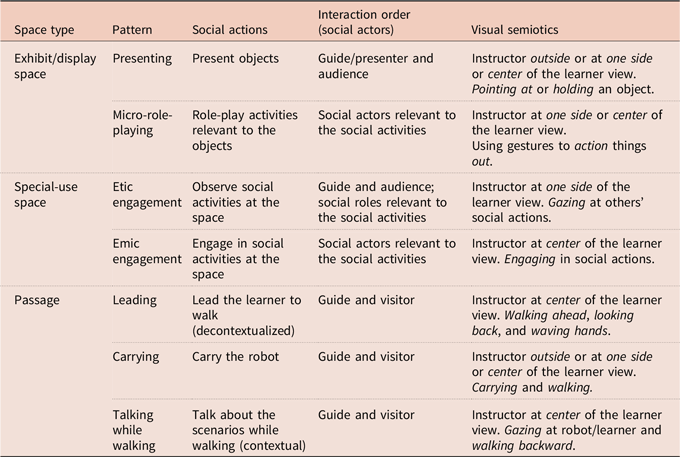
The results show that different patterns of discourses at each space emerged according to the features of geosemiotic systems, such as interaction order, visual semiotics, and social actions. The overarching findings are listed in Table 2, in which the body postures and gestures of the instructor and the robot’s learner-controlled movement are described in the social actions column, the social roles of the interlocutors are identified in the interaction order column, and the key frames are presented in the visual semiotics column.
Table 2. Overarching findings of the geosemiotics analysis
4.1 Presenting and micro-role-playing at exhibit/display spaces
Exhibit/display spaces are “simply to be looked at as we do other things in them or as we pass through them” (Scollon & Scollon, Reference Scollon and Scollon2003: 170). In this study, the gate and the sundial can be considered exhibit/display spaces, since the space and the ornaments are used for viewing purposes. For instance, the gate as well as its ornaments, pumpkins, benches, and walls constitute an exhibit/display space (see Figure 3).

Figure 3. Exhibit/display space near the gate
Two patterns were identified in the exhibit/display space. The first pattern is named presenting, as it would be natural for a tour guide to introduce the objects in an exhibit/display space to a visitor based on what the visitor has seen. Table 3 shows a typical presenting scenario between an instructor and an FL learner who controlled the robot near the garden of the arboretum.
Table 3. Presenting pumpkins at an exhibit/display space near the arboretum gate
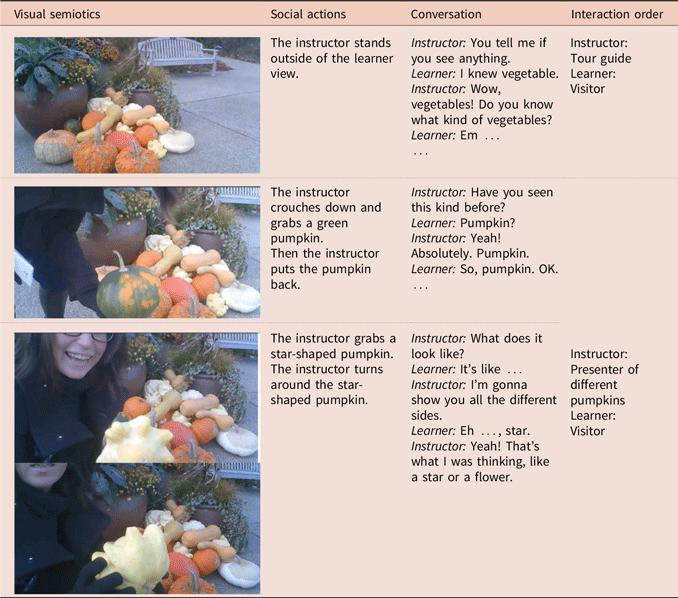
Note. Em and Eh are the Chinese pronunciations equivalent to um in English.
The social action with this conversation in Table 3 is that a tour guide, played by the instructor, introduces the pumpkins to the visitor, played by the FL learner. In place semiotics terms, the place type is exhibit/display, and the conversation between the instructor and the FL is contextual, since all content of the conversation in the clip is relevant to the objects in the place. In terms of interaction order, the social actors – the instructor and the FL learner – are a tour guide/presenter and a visitor/audience, respectively.
Another pattern that can be found in exhibit/display spaces is called micro-role-playing, in which instructors tend to expand the discourse from the appearance of the objects to the social activities and cultural functions of the objects. Table 4 shows an example in which an instructor is describing the cultural meaning of pumpkins in Western countries by creating the action of carving pumpkin faces.
Table 4. Micro-role-playing for expanding discourse to sociocultural aspects of an object
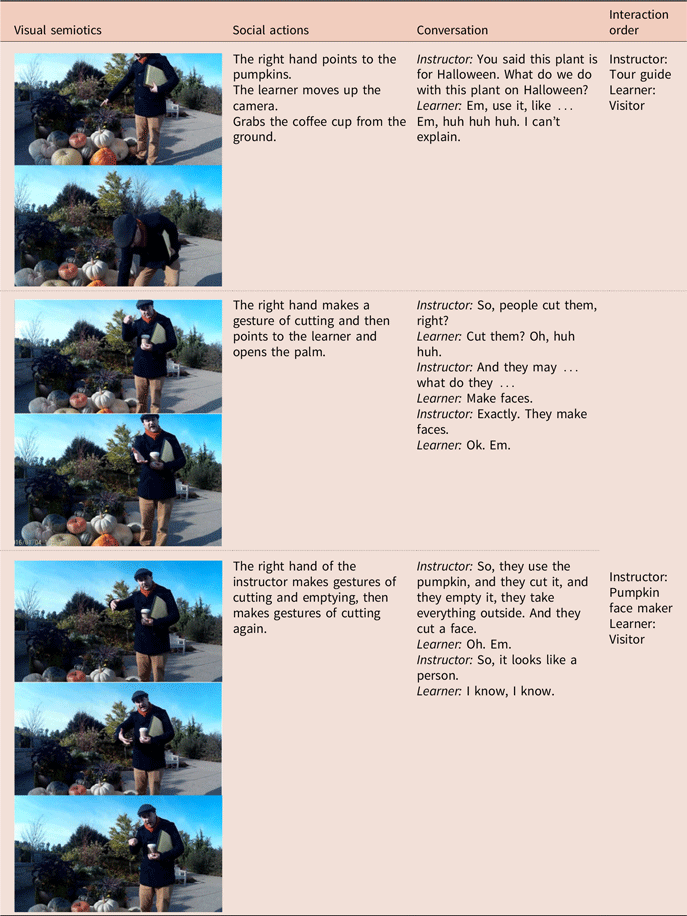
From the perspective of geosemiotics, the instructor’s behavior in demonstrating the process of carving a pumpkin face changes his social role from a tour guide to a pumpkin face maker. In addition, the space of the social action has been switched from the physical arboretum gate to an imaginary place of making a pumpkin face, such as home. We call this micro-role-playing because the role-play happens and finishes very quickly – that is, the instructor turns his role from the pumpkin face maker back to a tour guide once he has finished the conversation about pumpkin face making.
4.2 Etic and emic engagement at special-use spaces
Special-use spaces, such as shopping malls and restaurants, have a purpose for public use (Scollon & Scollon, Reference Scollon and Scollon2003). In this study, the event lawns and pavilion can be considered special-use spaces since they are designated for purposes such as hosting a ceremony or concert. We observed that there are two patterns in the discourse at a special-use space: One is called etic engagement and the other emic engagement. In etic engagement, the instructor and the learners position themselves as outsiders to observe the social actions or objects at a special-use space. In emic engagement, the instructor and the learner play the social roles and engage in the social actions themselves in the special-use space.
Table 5 demonstrates a typical example of etic engagement on the event lawn in the arboretum garden. The social action here is watching two other visitors playing baseball at the center of the lawn. Here, there are three types of social actors: the instructor as a tour guide, the learner as a visitor, and the other two visitors as baseball players.
Table 5. Etic engagement with baseball game at a special-use space
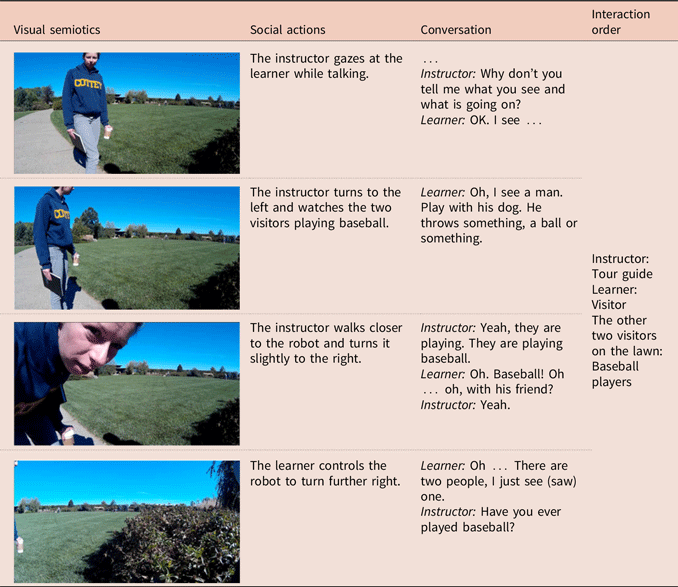
By contrast, Table 6 demonstrates how an instructor and a learner participate in the social actions at the event lawn in an emic way. The instructor first asks the learner a question about a picnic on the grass field. However, the learner does not get the point, so the instructor role-plays a picnic by taking off her coat and putting it on the grass. Then the instructor sits on her coat and starts to talk more about a picnic in America, to help the learner to understand the meaning of the word “picnic.”
Table 6. Emic engagement into a picnic at a special-use space
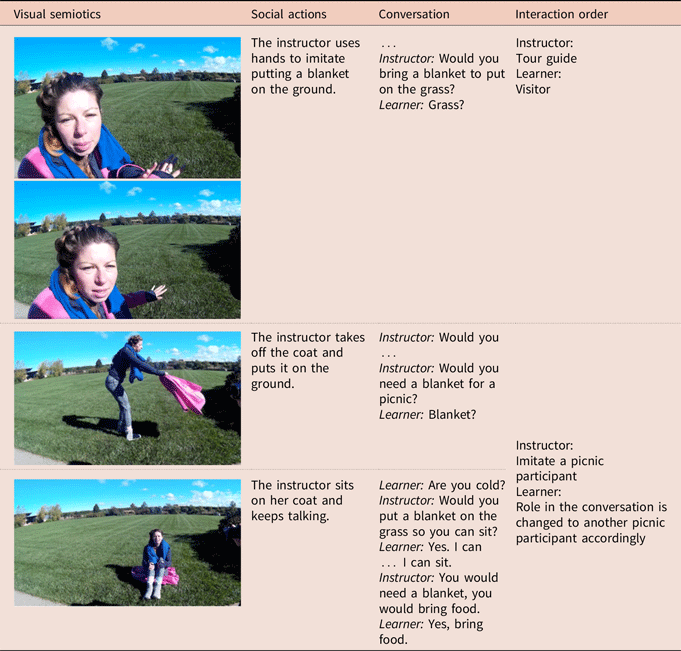
In this example, the instructor changes her role from a tour guide to a participant of a picnic on the lawn. The instructor sits and talks to the learner. Accordingly, the learner becomes another picnic participant in the discourse.
4.3 Three instructional strategies at passage spaces
Passage spaces are spaces that allow people to travel through an area, such as roads, pathways, stairs, and escalators. Scollon and Scollon (Reference Scollon and Scollon2003) pointed out that passage spaces can “foster a kind of slow, ‘civilized’ passage on foot” and allow people to “walk together with others in a common social space without having to keep a constant eye out for automobiles” (p. 170). Using this definition, the pathway at the garden in this study can be considered a passage space.
Table 7 shows a typical strategy, leading, at a passage space from the witness tree of the garden to the pavilion (see Figure 1). The instructor guides the learner to control the robot walking towards the destination. As a result, the content of the conversation is decontextualized. In other words, it is not related directly to the scenarios in the environment, but instead is relevant only to the action of moving the robot. This decontextualized content can thus be applied to any scenario. The instructor uses his body movement, gestures, and phrases such as “keep going” to show the correct direction to the learner. It takes a relatively long time to move from one spot to the next due to the robot’s slow speed.
Table 7. Leading the learner at the passage space between the witness tree and the pavilion
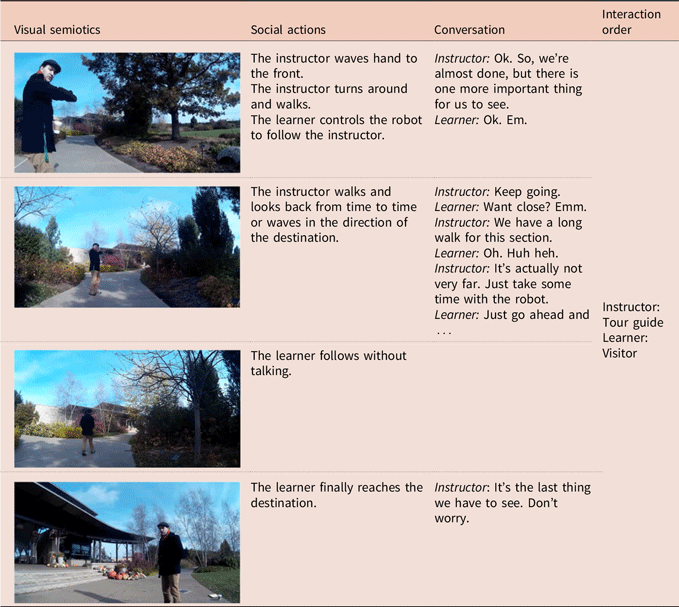
Figure 4 shows the second strategy, carrying, which is being used by the instructor in the passage space. Instead of waiting for the learner to control the robot, the instructor carries the robot to pass through the passage space. The instructor and the learner can still talk with each other. However, the learner may lose their ability to look around the environment by themselves.

Figure 4. Carrying the robot at a passage place
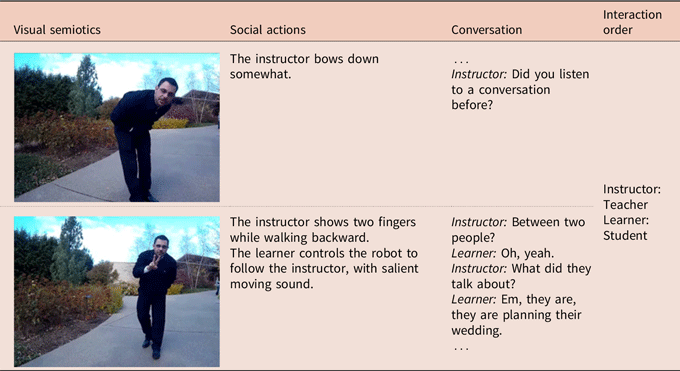
The third strategy we observed in the activities is talking while walking. In Table 8, the instructor asks some questions relevant to the next garden feature while walking backward. The learner answers the question while following the instructor. Although it takes the same time as the first strategy, leading, the instructor and the learner can have more conversation about the scenarios, so the content of the discourse is contextual. However, the sound of the robot moving is noticeable during the walking, so it might influence the learner’s hearing of the conversation.
Table 8. Talking while walking from the witness tree to the pavilion
5. Discussion
Existing geosemiotics studies have demonstrated how geosemiotics can be applied in various settings (e.g. Hamid, Reference Hamid2016; Lou, Reference Lou2017; Pierce, Reference Pierce2012). However, few studies have examined the influence of places on language acquisition from the perspective of geosemiotics. This study bridges the gap between sense-making in meaning-focused instruction and geosemiotics by pulling out the interactional patterns from the framework of geosemiotics. In addition, this study provides insights on the instructional design and educational robot design at different places in TPFLL learning activities.
5.1 Meaning-making in place outside classroom via telepresence robot
In FL teaching, the place of learning is typically limited to the classroom. However, it is now possible to have learners be exposed to and engaged in real language use at a remote place in TL countries with the support of telepresence technologies. Geosemiotics provides a theoretical lens for understanding the sense-making process in meaning-focused instructional activities.
Three semiotic systems – interaction order, visual semiotics, and place semiotics – shape the discourse and its meaning. In terms of interaction order, this study consolidates the findings of Wohlwend et al.’s (Reference Wohlwend, Vander Zanden, Husbye and Kuby2011) study about kids or learners playing various social roles. Each pair of instructor and learner in this study played diverse social roles such as tour guide, pumpkin carver, or picnic participant. Even though the activities are not fully authentic, as the instructor is only “playing” certain roles in the social actions (e.g. the instructor is not a real pumpkin face maker), the activities are more authentic than role-play in the classroom as they are contextualized in the actual physical environment. We thus label these actions contextualized role-play. The content and communication modes of the conversation were aligned with the social roles of the speakers accordingly, facilitating the learners’ understanding of the cultural meanings of new words and expressions.
Visual semiotics also influence how the learner makes sense of the discourse in a specific space. As was the case in the study by Lee, Hampel and Kukulska-Hulme (Reference Lee, Hampel and Kukulska-Hulme2019), gestures such as pointing and acting things out establish joint attention towards the words and expressions describing the objects in the remote environment and scaffold the learner to make sense of those words and expressions. However, different from mobile videoconferencing tools, the telepresence robot allows the local participant to better support the learner’s understanding of the cultural meanings of new words and expressions by using both hands to gesture or perform actions. Additionally, the telepresence robot affords telepresence agency (Jakonen & Jauni, Reference Jakonen, Jauni, Ennser-Kananen and Saarinen2022) to the learners by allowing them to control the viewing angle of the camera and the movement of the robot, as shown in Tables 5 and 6.
In terms of place semiotics, this study summarized the conversational patterns for the three space types proposed by Scollon and Scollon (Reference Scollon and Scollon2003). The findings demonstrated how meaning-focus instruction outside the classroom differs from that in the classroom (e.g. Saeidi et al., Reference Saeidi, Zaferanieh and Shatery2012). Notably, the special-use space helps engage the learners in the social actions in an etic or emic way. The environment, along with the social actors and social actions, makes the context of the conversation more authentic than in the classroom. Moreover, the passage space supports the instructor and the learner to talk about the scenarios while walking between different space spots, an experience that is absent in the classroom.
All in all, our findings provide additional evidence that sense-making is a complex and ongoing process that is socially and culturally related to humans’ social actions at a given place (De Jaegher & Di Paolo, Reference De Jaegher and Di Paolo2007; Weick, Reference Weick1995). The mobility (Laurier et al., Reference Laurier, Lorimer, Brown, Jones, Juhlin, Noble and Weilenmann2008) of the telepresence robot facilitates the learners’ sense-making process by allowing them to integrate resources from the semiotic systems of interaction order, visuals, and place (e.g. Cresswell, Reference Cresswell2006).
5.2 Design of meaning-focused instructional activities from the perspective of geosemiotics
Most existing studies have situated meaning-focused instructional activities in the classroom, engaging learners in meaning elaboration or negotiation in meaningful communicative events (e.g. Ozverir, Osam & Herrington, Reference Ozverir, Osam and Herrington2017; Saeidi et al., Reference Saeidi, Zaferanieh and Shatery2012; Thomas, Piasta, Bailet, Zettler-Greeley & Lewis, Reference Thomas, Piasta, Bailet, Zettler-Greeley and Lewis2023). Our findings show that meaning elaboration or negotiation can be initiated by the objects and social actions in meaning-focused instructional activities outside the classroom. While some previous studies also involved instructional activities outside the classroom (e.g. Richardson & Murray, Reference Richardson and Murray2017), this study differs from those studies by specifically examining the interaction between the instructors and students in three space types based on the framework of place semiotics in geosemiotics, yielding place-dependent teaching strategies. For exhibit/display space, the instructor needs to observe what objects can be used for the conversation, taking into consideration the objects’ appearance, functions, and cultural meanings. For special-use space, the instructor can list the possible social activities and prepare relevant equipment or tools for role playing, especially in an emic way. For passage spaces, it is necessary to plan the conversational strategies that will be adopted considering the length of the route and the objects around the pathway.
Meanwhile, the influence of the types of meaning-based instructional activities used in our study on the learners’ acquisition of language forms remains unclear, given the focus of the current study on the meaning-making process. Long and Robinson (Reference Long, Robinson, Doughty and Williams1998) claimed that discarding grammar in FoM may result in language inaccuracy. Future studies could explore how a telepresence robot may support instructional activities outside of the classroom from a FoF instructional approach integrating input flood, input enhancement, and recast (Doughty & Williams, Reference Doughty, Williams, Doughty and Williams1998, cited in Saeidi et al., Reference Saeidi, Zaferanieh and Shatery2012).
5.3 Telepresence design from the perspective of geosemiotics
Very few studies have investigated how the telepresence robot could be better designed to support FL learning. Our previous studies (Liao & Lu, Reference Liao and Lu2018; Liao et al., Reference Liao, Lu, Masters, Dudek and Zhou2022) have examined the perceived benefits and challenges of the telepresence robot in FL learning outside the classroom. The findings of the current study shed light on how the design of the telepresence robot can meet the instructional needs for three space types from the perspective of geosemiotics.
In exhibit/display spaces, the telepresence robot used in the current robot provided basic support for learners’ telepresence agency (Jakonen & Jauni, Reference Jakonen, Jauni, Ennser-Kananen and Saarinen2022), allowing the learner to adjust the view angle to obtain a better view of the focused objects or social activities by turning the robot around or tilting the camera on the robot head up and down (see the learner view in Tables 3 and 4). However, for special-use spaces, one limitation of the robot regarding its mobility is its inability to walk on grass. This drawback is particularly notable when the instructor hopes to engage the learner in the social actions in an emic way at the space, such as for a picnic. A second limitation of the telepresence robot is its lack of mechanical arms, which makes it impossible to engage the learner in social actions that require the use of hands, such as throwing a frisbee. This point is also aligned with Tanaka et al.’s (Reference Tanaka, Takahashi, Matsuzoe, Tazawa and Morita2013) claim that telepresence robots equipped with two mechanical arms can more effectively support the communication between distant classrooms.
For passage spaces, the speed of the current telepresence robot is still slow. As a result, some instructors choose to carry the robot through the passage, to some extent hindering the learner’s agency in observing the environment on their own. Although talking and walking may also be a good instructional strategy in these instances, the sound of the robot moving could affect the learner’s ability to hear the instructor clearly. Leading is still a useful strategy, as learners may drive the robot off track and the robot may fall on uneven ground. The learner could drive the robot on their own more freely to have more casual and authentic conversation with people along the route without instructor involvement if the robot can allow the learner to better see the route and non-even ground.
Overall, future telepresence robots need to be faster and quieter, with better mobility on different terrains, and with mechanical arms for FL instruction from the perspective of geosemiotics.
Conclusion
This paper examines the meaning-making process in meaning-focused instruction via a telepresence robot through the theoretical lens of geosemiotics. The results show that conversations within FoM activities are shaped by three geosemiotic systems – interaction order, visual semiotics, and place semiotics – as well as social actions. The findings suggest that FoM activities should be designed based on the different space types. In addition, the geosemiotic analysis of FoM activities shows that telepresence robots should be improved to meet instructional needs in different settings.
It is not clear yet whether the findings of this study are applicable to FoM activities at learning sites other than an arboretum. The interactions are limited to a learner and an instructor, rather than peers in more naturalistic situations. Moreover, the learning outcome of FoM activities (i.e. the degree to which the FoM activities can improve learners’ communicative use of the FL) has not yet been measured. We plan to conduct more studies with instructors or peers at different learning sites, such as a library, a parking lot, or a restaurant, to examine the instructional strategies and learning outcomes of FoM activities further.
Acknowledgements
This work was supported by the National Natural Science Foundation of China (NSFC) under Grant 62177039 and the Innovation Research 2035 Pilot Plan of Southwest University under Grant SWUPilotPlan002.
We would like to thank Dr Simon Hooper, Dr Ty Hollett, and Dr Heather Zimmerman at Penn State University for their academic guidance and the instructors and learners of the study for their participation. We are also grateful for the support from the Arboretum of Penn State University, especially from Dr Kim C. Steine, Kelly Oleynik, Kate Reeder, and Shari Ederson.
Ethical statement and competing interests
The study received approval from the Institutional Review Board, and all participants signed a consent form before engaging in the learning activities. All participants gave explicit consent for the use of their faces in the images for research purposes. Pseudonyms are used when referring to the participants. All videos are stored in the researcher’s hard disk and participants can withdraw from the study at any time. The authors declare no competing interests.
About the authors
Jian Liao is an associate professor in the College of Educational Technology, Faculty of Education, at Southwest University in China. His research interests include computer-assisted language learning, educational robots, and the design of smart education environments.
Xiaofei Lu is Professor of Applied Linguistics and Asian Studies at The Pennsylvania State University. His research interests are primarily in corpus linguistics, English for Academic Purposes, second language writing, second language acquisition, and intelligent computer-assisted language learning. He is the author of Corpus Linguistics and Second Language Acquisition: Perspectives, Issues, and Findings (2023, Routledge).
Katherine Masters is a lecturer of applied linguistics and composition for the Department of English at Cal Poly Humboldt, USA. Her research interests lie at the interface of English language policy and planning and second language teacher education, especially in countries facing extreme socioeconomic hardship. She also critiques English language volunteerism/voluntourism.
Zhi Zhou obtained her master’s degree from the College of Architecture and Urban Planning at Chongqing University, China. Her research interests focus on how architecture design and urban planning influence learning in place-based education. She has been participating in the project discussed in this paper as a project manager and data analyst.
Author ORCIDs
Jian Liao, https://orcid.org/0000-0001-6290-3326
Xiaofei Lu, https://orcid.org/0000-0003-2365-2581
Katherine A. Masters, https://orcid.org/0000-0002-2163-6273
Zhi Zhou, https://orcid.org/0009-0004-8959-1069













 Open access
Open access