



1. Introduction
An active particle (or microswimmer), be it a living cell or a synthetic swimmer, converts the internal or ambient free energy into work as it moves through a viscous fluid (Lauga & Powers Reference Lauga and Powers2009; Bechinger et al. Reference Bechinger, Di Leonardo, Löwen, Reichhardt, Volpe and Volpe2016; Gompper et al. Reference Gompper, Winkler, Speck, Solon, Nardini, Peruani, Löwen, Golestanian, Kaupp and Alvarez2020). From a broad hydrodynamic perspective, the physics behind the propulsion of an active swimmer can be divided into two parts: the inner problem, which concerns the generation of the propulsive thrust, and the outer problem, which focuses on how swimmers interact with their neighbouring environment through altering their surrounding fluid. While in the former accounting for the details of the mechanism behind the impetus of each specific swimmer is essential (for example through cilia (Blake & Sleigh Reference Blake and Sleigh1974) or a phoretic mechanism (Golestanian, Liverpool & Ajdari Reference Golestanian, Liverpool and Ajdari2005; Nasouri & Golestanian Reference Nasouri and Golestanian2020)), in the latter, one can use a generic approach to describe the flow field induced by the swimmer (Kim & Karrila Reference Kim and Karrila1991; Lauga & Michelin Reference Lauga and Michelin2016; Nasouri & Elfring Reference Nasouri and Elfring2018). Specifically for self-propelling axisymmetric swimmers, this generic approach classifies the swimmers into three groups of pushers, pullers and neutrals, often referred to as the microswimming types (Underhill, Hernandez-Ortiz & Graham Reference Underhill, Hernandez-Ortiz and Graham2008; Lauga & Powers Reference Lauga and Powers2009). This categorization, which stems from the far-field description of the motion of a particle in a viscous fluid, relies on the fact that self-propulsion is force- and torque-free, and so the leading-order flow field induced by an active swimmer can be solely described by a symmetric force dipole, i.e. stresslet (Batchelor Reference Batchelor1970). Based on the strength of this force dipole, a swimmer is a puller when it generates the impetus from its front end, a pusher when the thrust originates from the rear end and is neutral when this strength is zero. Examples of pusher-type microswimmers include Escherichia coli bacteria that use bundles of rotating helical filaments in their rear (Berke et al. Reference Berke, Turner, Berg and Lauga2008), or sperm cells that propel themselves by propagating a wave along a flexible flagellum. An example of puller-type microswimmers is Chlamydomonas reinhardtii that pulls in the fluid in front of it with a pair of flagella beating in a breaststroke-like fashion (Kantsler et al. Reference Kantsler, Dunkel, Polin and Goldstein2013). Volvox, a multicellular colony of green algae, is a neutral swimmer (Drescher et al. Reference Drescher, Leptos, Tuval, Ishikawa, Pedley and Goldstein2009; Pedley, Brumley & Goldstein Reference Pedley, Brumley and Goldstein2016), whereas Paramecium is a weak pusher (Zhang et al. Reference Zhang, Jana, Giarra, Vlachos and Jung2015).
Swimmers of different type behave differently when interacting with their surroundings. For instance, unlike puller-like swimmers, pushers can be hydrodynamically trapped by nearby obstacles or other pusher swimmers (Berke et al. Reference Berke, Turner, Berg and Lauga2008; Spagnolie et al. Reference Spagnolie, Moreno-Flores, Bartolo and Lauga2015; Daddi-Moussa-Ider et al. Reference Daddi-Moussa-Ider, Lisicki, Mathijssen, Hoell, Goh, Bławzdziewicz, Menzel and Löwen2018; Sprenger et al. Reference Sprenger, Shaik, Ardekani, Lisicki, Mathijssen, Guzmán-Lastra, Löwen, Menzel and Daddi-Moussa-Ider2020). The stresslet further determines the intensity of fluid stirring in suspensions of swimmers (Lin, Thiffeault & Childress Reference Lin, Thiffeault and Childress2011). Although the effect of swimming type on the interaction of each swimmer with other swimmers/boundaries has been well explored, their energetic implications are yet to be fully understood. For surface-driven spherical swimmers, it has been shown that the viscous dissipation of neutral swimmers is minimal compared with that of pushers and pullers, and so neutral swimmers are often considered as the optimal type (Michelin & Lauga Reference Michelin and Lauga2010). However, the innate question of whether this statement holds when the swimmer does not possess a perfect spherical shape remains largely unanswered. This is the question we address in this study.
The question of energetic efficiency and optimal propulsion, i.e. minimizing the dissipation while maintaining the swimming speed or equivalently maximizing the swimming speed while maintaining the dissipation, is a long-standing problem. Earlier theoretical works focused on the optimal locomotion of flagellated micro-organisms (Pironneau & Katz Reference Pironneau and Katz1974; Lighthill Reference Lighthill1975). In particular, the optimal shape of a periodically actuated planar flagellum deforming via a travelling wave has been derived computationally (Lauga & Eloy Reference Lauga and Eloy2013), and shown to agree well with the waveform assumed by sperm cells of marine organisms. The optimal swimming strokes and self-propulsion efficiencies of spherical and cylindrical bodies undergoing small deformation with respect to a reference shape has also been investigated (Shapere & Wilczek Reference Shapere and Wilczek1987, Reference Shapere and Wilczek1989). Further studies considered the full optimization problem for simple mechanically actuated model microswimmers (Alouges, DeSimone & Lefebvre Reference Alouges, DeSimone and Lefebvre2007; Nasouri, Vilfan & Golestanian Reference Nasouri, Vilfan and Golestanian2019).
Generally, the quest for the optimal propulsion strategy requires both the solution of the inner and the outer problems. Swimming efficiency of ciliated microswimmers can be directly determined numerically (Ito, Omori & Ishikawa Reference Ito, Omori and Ishikawa2019; Omori, Ito & Ishikawa Reference Omori, Ito and Ishikawa2020), but it is more common to use a coarse-grained approach, namely to separately calculate the dissipation in the propulsive layer and then replace this layer with an effective slip velocity when determining the external flow (Keller & Wu Reference Keller and Wu1977; Sabass & Seifert Reference Sabass and Seifert2010; Osterman & Vilfan Reference Osterman and Vilfan2011; Vilfan Reference Vilfan2012). A fundamental limit on swimming efficiency can be obtained by finding the slip profile that minimizes the external dissipation for a given swimming speed. For spherical swimmers, by using the classical squirmer model of Lighthill (Reference Lighthill1952) and Blake (Reference Blake1971), one can show that the contribution of the second mode of squirming (which characterizes the stresslet) to the dissipated power can only be positive. Because the swimming speed for spherical squirmers is independent of this second mode, we can conclude that minimizing the dissipation requires the second mode to be zero, thereby making the optimal swimmer a neutral one (Blake Reference Blake1973). However, such a simple decomposition of contributions cannot be achieved for non-spherical swimmers, and so the correlation between the dipole coefficient and the dissipation is not clearly known. Recently, using the boundary element method and numerical optimization, Guo et al. (Reference Guo, Zhu, Liu, Bonnet and Veerapaneni2021) showed on some example shapes that when the swimmer body is not front–aft symmetric, pushers or pullers can be more efficient than neutral swimmers. In this study, we systematically investigate the relation between the stresslet and the shape of nearly spherical optimal swimmers. By employing the recently derived minimum dissipation theorem (Nasouri, Vilfan & Golestanian Reference Nasouri, Vilfan and Golestanian2021), we circumvent the nonlinear optimization problem and arrive at the flow field for the optimal swimmer using the flow fields of two auxiliary passive problems. We remarkably find that the stresslet of an optimal swimmer is solely a function of the third Legendre mode describing the shape of the swimmer, and so depending on the value (or sign) of this mode, the optimal swimmer can be a pusher, puller or neutral.
2. The problem statement
In this study, our aim is to determine whether an optimal nearly spherical swimmer is a puller, pusher or neutral. To this end, we consider a swimming body of axisymmetric shape moving with a steady velocity  $V_{A}\boldsymbol {e}_z$, where
$V_{A}\boldsymbol {e}_z$, where  $\boldsymbol {e}_z$ is a unit vector representing the axis of symmetry. We parametrize the surface of the swimming object in axisymmetric spherical coordinates by
$\boldsymbol {e}_z$ is a unit vector representing the axis of symmetry. We parametrize the surface of the swimming object in axisymmetric spherical coordinates by
 \begin{equation} r(\theta)= a \left[ 1 + \sum_{\ell=1}^\infty \alpha_\ell P_\ell(\cos\theta) \right], \end{equation}
\begin{equation} r(\theta)= a \left[ 1 + \sum_{\ell=1}^\infty \alpha_\ell P_\ell(\cos\theta) \right], \end{equation}
where  $a$ denotes the radius of the undeformed sphere,
$a$ denotes the radius of the undeformed sphere,  $\theta$ represents the polar angle with respect to
$\theta$ represents the polar angle with respect to  $\boldsymbol {e}_z$ and
$\boldsymbol {e}_z$ and  $P_\ell$ is the Legendre polynomial of degree
$P_\ell$ is the Legendre polynomial of degree  $\ell$ (see figure 1). We assume
$\ell$ (see figure 1). We assume  $\alpha _\ell \ll 1$, thus the particle possesses a nearly spherical shape. Note that because the first mode merely implies body translation and does not indicate any departure from the spherical shape, we set
$\alpha _\ell \ll 1$, thus the particle possesses a nearly spherical shape. Note that because the first mode merely implies body translation and does not indicate any departure from the spherical shape, we set  $\alpha _1=0$.
$\alpha _1=0$.

Figure 1. (a) Schematic of the nearly spherical swimmer described in (2.1). (b) The isolated contribution of the first four modes in the shape function. Black lines show the perturbed shape and the grey lines illustrate the reference unperturbed sphere.
At the small scales of microswimmers, viscous forces dominate inertial forces, and the flow is governed by the Stokes equations  $\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {\sigma } = \boldsymbol {0}$ and
$\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {\sigma } = \boldsymbol {0}$ and  $\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {v} = 0$ with
$\boldsymbol {\nabla } \boldsymbol {\cdot } \boldsymbol {v} = 0$ with  $\boldsymbol {v}$ denoting the flow field,
$\boldsymbol {v}$ denoting the flow field,  $\boldsymbol {\sigma }=-p \boldsymbol {I} +\mu ( \boldsymbol {\nabla } \boldsymbol {v} + \boldsymbol {\nabla } \boldsymbol {v}^\top )$ the stress field and
$\boldsymbol {\sigma }=-p \boldsymbol {I} +\mu ( \boldsymbol {\nabla } \boldsymbol {v} + \boldsymbol {\nabla } \boldsymbol {v}^\top )$ the stress field and  $p$ the pressure field. The swimmer is surface-driven and its active mechanism induces an effective tangential slip-velocity
$p$ the pressure field. The swimmer is surface-driven and its active mechanism induces an effective tangential slip-velocity  $\boldsymbol {v}^s$ on its surface, which imposes the boundary condition on the fluid velocity in the co-moving frame
$\boldsymbol {v}^s$ on its surface, which imposes the boundary condition on the fluid velocity in the co-moving frame  $\boldsymbol {v}=\boldsymbol {v}^s$. The slip profile determines the swimming velocity
$\boldsymbol {v}=\boldsymbol {v}^s$. The slip profile determines the swimming velocity  $V_A$ through a relationship that can be derived from the Lorentz reciprocal theorem (Stone & Samuel Reference Stone and Samuel1996). The dissipated power is given by
$V_A$ through a relationship that can be derived from the Lorentz reciprocal theorem (Stone & Samuel Reference Stone and Samuel1996). The dissipated power is given by  $P=-\int \boldsymbol {v}^s \boldsymbol {\cdot } \boldsymbol {\sigma } \boldsymbol {\cdot } \boldsymbol {n}\, \textrm {d}S$. We consider the swimmer to be optimal, thus this slip profile minimizes the viscous dissipation
$P=-\int \boldsymbol {v}^s \boldsymbol {\cdot } \boldsymbol {\sigma } \boldsymbol {\cdot } \boldsymbol {n}\, \textrm {d}S$. We consider the swimmer to be optimal, thus this slip profile minimizes the viscous dissipation  $P$, while maintaining the swimming speed
$P$, while maintaining the swimming speed  $V_{A}$.
$V_{A}$.
We should note that the present analytical description of microswimmers applies exclusively to non-deformable active swimmers of nearly spherical shape. Prime examples of these swimmers include a broad class of ciliated microorganisms or synthetic microswimmers that achieve locomotion via a thin slip layer (e.g. self-phoretic mechanisms).
As discussed earlier, the far-field flow generated by the force- and torque-free motion of a microswimmer has the form (to the leading order)  $\boldsymbol {v}(\boldsymbol {x})= -(3 / (8{\rm \pi} \mu )) (\boldsymbol {x} \boldsymbol {\cdot } \boldsymbol {S} \boldsymbol {\cdot } \boldsymbol {x}) \, \boldsymbol {x}/r^5$ and is characterized by the stresslet
$\boldsymbol {v}(\boldsymbol {x})= -(3 / (8{\rm \pi} \mu )) (\boldsymbol {x} \boldsymbol {\cdot } \boldsymbol {S} \boldsymbol {\cdot } \boldsymbol {x}) \, \boldsymbol {x}/r^5$ and is characterized by the stresslet  $\boldsymbol {S}$. Here, because the motion is axisymmetric, the stresslet takes the simple form of
$\boldsymbol {S}$. Here, because the motion is axisymmetric, the stresslet takes the simple form of
 \begin{equation} \boldsymbol{S} = 8{\rm \pi} \mu a^2 V_A\, \beta \left( \boldsymbol{e}_z \boldsymbol{e}_z - \tfrac{1}{3} \, \boldsymbol{I} \right), \end{equation}
\begin{equation} \boldsymbol{S} = 8{\rm \pi} \mu a^2 V_A\, \beta \left( \boldsymbol{e}_z \boldsymbol{e}_z - \tfrac{1}{3} \, \boldsymbol{I} \right), \end{equation}
where  $\beta$ is the dimensionless dipole coefficient (Batchelor Reference Batchelor1970; Nasouri & Elfring Reference Nasouri and Elfring2018). Under this definition, the sign of
$\beta$ is the dimensionless dipole coefficient (Batchelor Reference Batchelor1970; Nasouri & Elfring Reference Nasouri and Elfring2018). Under this definition, the sign of  $\beta$ determines the swimming type such that
$\beta$ determines the swimming type such that  $\beta < 0$ holds for pushers,
$\beta < 0$ holds for pushers,  $\beta > 0$ for pullers and
$\beta > 0$ for pullers and  $\beta =0$ indicates neutral swimming. Thus, to determine the swimming type of an optimal nearly spherical swimmer, we need to find the relation between
$\beta =0$ indicates neutral swimming. Thus, to determine the swimming type of an optimal nearly spherical swimmer, we need to find the relation between  $\beta$ and
$\beta$ and  $\alpha _\ell$.
$\alpha _\ell$.
Conventionally, finding the flow field surrounding an optimal swimmer requires extensive optimization schemes, which are often implemented by means of computational tools. Here, we alternatively apply a fundamental theorem that sets the lower bound on the energy dissipation of a self-propelled active microswimmer of arbitrary shape (Nasouri et al. Reference Nasouri, Vilfan and Golestanian2021). It states that the motion of an active swimmer with minimal dissipation can be conveniently expressed as a linear superposition of two passive bodies of the same shape satisfying no-slip and perfect-slip boundary conditions at their surfaces, respectively. This theorem relies on the fact that perfect-slip bodies require the least dissipation for motion, which suggests that a swimmer with a similar slip profile will be more efficient. A superposition with the no-slip problem is needed to obtain a force-free flow around an active swimmer (see Nasouri et al. (Reference Nasouri, Vilfan and Golestanian2021) for the details of the derivation). Specifically, defining  $\boldsymbol {v}_A$ as the flow field induced by the motion of the optimal swimmer, this theorem dictates
$\boldsymbol {v}_A$ as the flow field induced by the motion of the optimal swimmer, this theorem dictates
 \begin{equation} \boldsymbol{v}_A=\boldsymbol{v}_{PS}-\boldsymbol{v}_{NS}, \end{equation}
\begin{equation} \boldsymbol{v}_A=\boldsymbol{v}_{PS}-\boldsymbol{v}_{NS}, \end{equation}
where  $\boldsymbol {v}_{PS}$ is the flow field owing to the motion of a passive perfect-slip body of the same shape translating with speed
$\boldsymbol {v}_{PS}$ is the flow field owing to the motion of a passive perfect-slip body of the same shape translating with speed  $V_{PS}=[R_{NS}/(R_{NS}-R_{PS})]{V}_A$, and
$V_{PS}=[R_{NS}/(R_{NS}-R_{PS})]{V}_A$, and  $\boldsymbol {v}_{NS}$ is the flow field of its no-slip counterpart moving with speed
$\boldsymbol {v}_{NS}$ is the flow field of its no-slip counterpart moving with speed  $V_{NS}=[R_{PS}/(R_{NS}-R_{PS})] {V}_A$, with
$V_{NS}=[R_{PS}/(R_{NS}-R_{PS})] {V}_A$, with  ${R}_{NS}$ and
${R}_{NS}$ and  ${R}_{PS}$ being the translational drag coefficients for the no-slip and the perfect-slip body, respectively.
${R}_{PS}$ being the translational drag coefficients for the no-slip and the perfect-slip body, respectively.
Accordingly, by means of this theorem, the optimization problem is reduced to finding the flow fields of two passive systems (henceforth referred to using ‘PS’ and ‘NS’) and their corresponding drag coefficients. Following an asymptotic approach, we will prove that the dipole coefficient takes a particularly simple expression and can solely be expressed in terms of the third Legendre mode as
 \begin{equation} \beta = \tfrac{27}{14} \, \alpha_3 . \end{equation}
\begin{equation} \beta = \tfrac{27}{14} \, \alpha_3 . \end{equation}
Based on this, the nearly spherical optimal swimmer is classified as a pusher when  $\alpha _3 < 0$, puller when
$\alpha _3 < 0$, puller when  $\alpha _3 > 0$ and neutral if
$\alpha _3 > 0$ and neutral if  $\alpha _3 = 0$.
$\alpha _3 = 0$.
3. Solution of the passive problem
As discussed earlier, to find the flow field of the optimal active swimmer, we only need to determine the flow fields around a passive body of the same shape, once with a no-slip and once with a perfect-slip boundary condition.
Recalling that the particle is nearly spherical (i.e.  $\alpha _\ell \ll 1$), we use an asymptotic approach to find the flow fields, and expand all entities in terms of surface modes. At the zeroth order (denoted by ‘(0)’), we recover the flow fields arising from the passive motion of a spherical particle with no-slip and perfect-slip boundary conditions. The first-order correction (denoted by ‘(1)’) will then arise from the surface departure from the spherical shape, and so, based on the linearity of the field equations, must be a linear superposition of the surface modes, e.g.
$\alpha _\ell \ll 1$), we use an asymptotic approach to find the flow fields, and expand all entities in terms of surface modes. At the zeroth order (denoted by ‘(0)’), we recover the flow fields arising from the passive motion of a spherical particle with no-slip and perfect-slip boundary conditions. The first-order correction (denoted by ‘(1)’) will then arise from the surface departure from the spherical shape, and so, based on the linearity of the field equations, must be a linear superposition of the surface modes, e.g.  $\boldsymbol {v}=\boldsymbol {v}^{(0)}+\sum _\ell \alpha _\ell \boldsymbol {v}^{(1)}_\ell$. In what follows, we find the zeroth- and first-order flow fields for both the NS and PS problems by applying the Lamb's solution at each order separately.
$\boldsymbol {v}=\boldsymbol {v}^{(0)}+\sum _\ell \alpha _\ell \boldsymbol {v}^{(1)}_\ell$. In what follows, we find the zeroth- and first-order flow fields for both the NS and PS problems by applying the Lamb's solution at each order separately.
We should also account for the correction to the surface normal vector at the first order. At the zeroth order we have  $\boldsymbol {n}^{(0)} = \boldsymbol {e}_r$, and the departure from spherical shape leads to
$\boldsymbol {n}^{(0)} = \boldsymbol {e}_r$, and the departure from spherical shape leads to  $\boldsymbol {n}^{(1)} = -\sum _\ell \alpha _\ell P^1_\ell (\cos \theta ) \, \boldsymbol {e}_\theta$, where
$\boldsymbol {n}^{(1)} = -\sum _\ell \alpha _\ell P^1_\ell (\cos \theta ) \, \boldsymbol {e}_\theta$, where  $P_\ell ^1(\cos \theta )=\textrm {d}P_\ell (\cos \theta )/\textrm {d}\theta$ is the associate Legendre polynomial of the first order. The tangent vector is given by
$P_\ell ^1(\cos \theta )=\textrm {d}P_\ell (\cos \theta )/\textrm {d}\theta$ is the associate Legendre polynomial of the first order. The tangent vector is given by  $\boldsymbol {t}^{(0)} = \boldsymbol {e}_\theta$ and
$\boldsymbol {t}^{(0)} = \boldsymbol {e}_\theta$ and  $\boldsymbol {t}^{(1)} = \sum _\ell \alpha _\ell P^1_\ell (\cos \theta ) \, \boldsymbol {e}_r$.
$\boldsymbol {t}^{(1)} = \sum _\ell \alpha _\ell P^1_\ell (\cos \theta ) \, \boldsymbol {e}_r$.
3.1. No-slip problem
The solution for the flow past a nearly spherical body with a no-slip boundary is discussed by Happel & Brenner (Reference Happel and Brenner1983). In the following, we derive the flow field in a form that will be convenient for the solution of the active problem in the next section. Owing to the linearity of the problem, we only need to solve the flow field for a single mode of surface deformation (e.g.  $\alpha _\ell$), and the complete solution will be achieved by linear superposition of all modes.
$\alpha _\ell$), and the complete solution will be achieved by linear superposition of all modes.
In the co-moving frame of reference, the no-slip boundary condition requires vanishing velocities at the deformed surface of the object such that
 \begin{equation} \boldsymbol{v}_{NS} = \boldsymbol{0} \quad \text{at} \ r(\theta) =a\left[ 1 + \alpha_\ell P_\ell(\cos\theta)\right] . \end{equation}
\begin{equation} \boldsymbol{v}_{NS} = \boldsymbol{0} \quad \text{at} \ r(\theta) =a\left[ 1 + \alpha_\ell P_\ell(\cos\theta)\right] . \end{equation}
This condition can be expanded perturbatively to linear order in  $\alpha _\ell$ as
$\alpha _\ell$ as
 \begin{equation} \left. \boldsymbol{v}^{(0)} + \alpha_\ell \left( \boldsymbol{v}^{(1)} + a \, \frac{\partial \boldsymbol{v}^{(0)}}{\partial r} \, P_\ell(\cos\theta) \right) \right|_{r=a} = \boldsymbol{0} . \end{equation}
\begin{equation} \left. \boldsymbol{v}^{(0)} + \alpha_\ell \left( \boldsymbol{v}^{(1)} + a \, \frac{\partial \boldsymbol{v}^{(0)}}{\partial r} \, P_\ell(\cos\theta) \right) \right|_{r=a} = \boldsymbol{0} . \end{equation}
To find the Stokes flow that satisfies the above boundary condition, along with the condition  $\boldsymbol {v}=-V_{{NS}} \, \boldsymbol {e}_z$ at
$\boldsymbol {v}=-V_{{NS}} \, \boldsymbol {e}_z$ at  $r\to \infty$, we use Lamb's general solution in spherical coordinates as an ansatz (Happel & Brenner Reference Happel and Brenner1983). For axisymmetric problems, this solution simplifies to
$r\to \infty$, we use Lamb's general solution in spherical coordinates as an ansatz (Happel & Brenner Reference Happel and Brenner1983). For axisymmetric problems, this solution simplifies to
 $$\begin{gather} \frac{v_r}{V_{NS}} ={-}\cos\theta + \sum_{n=1}^{\infty} \frac{n+1}{2} \left( {n} A_n - 2{B_n} \left(\frac{a}{r}\right)^{2} \right) \left(\frac{a}{r}\right)^n P_n (\cos\theta) , \end{gather}$$
$$\begin{gather} \frac{v_r}{V_{NS}} ={-}\cos\theta + \sum_{n=1}^{\infty} \frac{n+1}{2} \left( {n} A_n - 2{B_n} \left(\frac{a}{r}\right)^{2} \right) \left(\frac{a}{r}\right)^n P_n (\cos\theta) , \end{gather}$$ $$\begin{gather}\frac{v_\theta}{V_{NS}} = \sin\theta + \sum_{n=1}^{\infty} \left( - \frac{n-2}{2} A_n + B_n \left(\frac{a}{r}\right)^{2} \right) \left(\frac{a}{r}\right)^n {P^1_n (\cos\theta)} , \end{gather}$$
$$\begin{gather}\frac{v_\theta}{V_{NS}} = \sin\theta + \sum_{n=1}^{\infty} \left( - \frac{n-2}{2} A_n + B_n \left(\frac{a}{r}\right)^{2} \right) \left(\frac{a}{r}\right)^n {P^1_n (\cos\theta)} , \end{gather}$$
where  $A_n$ and
$A_n$ and  $B_n$ are series coefficients that must be determined from the boundary conditions.
$B_n$ are series coefficients that must be determined from the boundary conditions.
The solution for the zeroth-order problem corresponding to an undeformed sphere can readily be obtained by imposing  $v_r^{(0)} = 0$ and
$v_r^{(0)} = 0$ and  $v_\theta ^{(0)} = 0$ at
$v_\theta ^{(0)} = 0$ at  $r=a$. This leads us to
$r=a$. This leads us to  $A_1^{(0)} = {3/2}$,
$A_1^{(0)} = {3/2}$,  $B_1^{(0)}= {1/4}$ and
$B_1^{(0)}= {1/4}$ and  $A_n^{(0)} = B_n^{(0)}= 0$ for
$A_n^{(0)} = B_n^{(0)}= 0$ for  $n \geqslant 2$. The zeroth-order flow field
$n \geqslant 2$. The zeroth-order flow field
 \begin{equation} \frac{v_r^{(0)}}{V_{NS}} ={-}\frac{1}{2} \left( 2-\frac{3a}{r} + \frac{a^3}{r^3} \right) \cos\theta , \quad \frac{v_\theta^{(0)}}{V_{NS}} = \frac{1}{4} \left( 4-\frac{3a}{r} - \frac{a^3}{r^3} \right) \sin\theta , \end{equation}
\begin{equation} \frac{v_r^{(0)}}{V_{NS}} ={-}\frac{1}{2} \left( 2-\frac{3a}{r} + \frac{a^3}{r^3} \right) \cos\theta , \quad \frac{v_\theta^{(0)}}{V_{NS}} = \frac{1}{4} \left( 4-\frac{3a}{r} - \frac{a^3}{r^3} \right) \sin\theta , \end{equation}represents the well-known flow past a no-slip sphere (Happel & Brenner Reference Happel and Brenner1983).
The boundary condition for the first-order problem (3.2) then reads  $\boldsymbol {v}^{(1)} = -a (\partial \boldsymbol {v}^{(0)}/\partial r) \, P_\ell (\cos \theta )$ at
$\boldsymbol {v}^{(1)} = -a (\partial \boldsymbol {v}^{(0)}/\partial r) \, P_\ell (\cos \theta )$ at  $r=a$. By noting that
$r=a$. By noting that  $\partial v_r^{(0)}/\partial r = 0$ at
$\partial v_r^{(0)}/\partial r = 0$ at  $r=a$, we find upon using appropriate orthogonality relations that only the series coefficients of order
$r=a$, we find upon using appropriate orthogonality relations that only the series coefficients of order  $n=\ell \pm 1$ have non-zero values. Specifically, we find
$n=\ell \pm 1$ have non-zero values. Specifically, we find  $A_{\ell -1}^{(1)}=-A_{\ell +1}^{(1)}=-(3/2)/(2\ell +1)$,
$A_{\ell -1}^{(1)}=-A_{\ell +1}^{(1)}=-(3/2)/(2\ell +1)$,  $B_{\ell -1}^{(1)}=-(3/4)(\ell -1)/(2\ell +1)$ and
$B_{\ell -1}^{(1)}=-(3/4)(\ell -1)/(2\ell +1)$ and  $B_{\ell +1}^{(1)}=(3/4)(\ell +1)/(2\ell +1)$. The first-order correction to the flow can be evaluated by inserting these coefficients into the generic solution given in (3.3). Examples of flow patterns for the first three deformation modes are shown in figure 2(a,d,g).
$B_{\ell +1}^{(1)}=(3/4)(\ell +1)/(2\ell +1)$. The first-order correction to the flow can be evaluated by inserting these coefficients into the generic solution given in (3.3). Examples of flow patterns for the first three deformation modes are shown in figure 2(a,d,g).

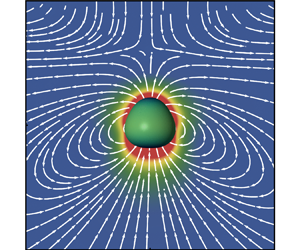
Figure 2. Streamlines around a slightly deformed sphere with no-slip (a,d,g), perfect-slip (b,e,h) and optimal active swimmer (c,f,i) in the co-moving frame. Each row shows one deformation mode with the amplitude  $\alpha _\ell =0.05$ for:
$\alpha _\ell =0.05$ for:  $\ell =2$ (a–c),
$\ell =2$ (a–c),  $\ell =3$ (d–f), and
$\ell =3$ (d–f), and  $\ell =4$ (g–i). The colour indicates the fluid velocity, scaled by the speed of the active swimmer.
$\ell =4$ (g–i). The colour indicates the fluid velocity, scaled by the speed of the active swimmer.
The drag force exerted on an object is always determined by the force monopole as  $F_{D} = -4{\rm \pi} \mu a A_1 V_{NS}$. Accordingly, the translational drag coefficient for an approximate sphere only depends on the zeroth and second Legendre modes and can be written as (Happel & Brenner Reference Happel and Brenner1983)
$F_{D} = -4{\rm \pi} \mu a A_1 V_{NS}$. Accordingly, the translational drag coefficient for an approximate sphere only depends on the zeroth and second Legendre modes and can be written as (Happel & Brenner Reference Happel and Brenner1983)
 \begin{equation} \frac{{R}_{NS}}{6{\rm \pi}\mu a} = 1 - \frac{1}{5} \alpha_2 . \end{equation}
\begin{equation} \frac{{R}_{NS}}{6{\rm \pi}\mu a} = 1 - \frac{1}{5} \alpha_2 . \end{equation}3.2. Perfect-slip problem
For the perfect-slip boundary condition, the impermeability and vanishing tangential stress need to be satisfied at the surface of the approximate sphere,
 \begin{equation} \boldsymbol{v}_{PS} \boldsymbol{\cdot} \boldsymbol{n} = 0 \quad \text{and} \quad \boldsymbol{t} \boldsymbol{\cdot} \boldsymbol{\sigma}_{PS} \boldsymbol{\cdot} \boldsymbol{n}={0} \quad \text{at} \ r(\theta) = a\left[1 + \alpha_\ell P_\ell(\cos\theta)\right] . \end{equation}
\begin{equation} \boldsymbol{v}_{PS} \boldsymbol{\cdot} \boldsymbol{n} = 0 \quad \text{and} \quad \boldsymbol{t} \boldsymbol{\cdot} \boldsymbol{\sigma}_{PS} \boldsymbol{\cdot} \boldsymbol{n}={0} \quad \text{at} \ r(\theta) = a\left[1 + \alpha_\ell P_\ell(\cos\theta)\right] . \end{equation}
A Taylor expansion up to linear order in  $\alpha _\ell$ leads to
$\alpha _\ell$ leads to
 $$\begin{gather} \left. v_r^{(0)} + \alpha_\ell \left( v_r^{(1)} + v_\theta^{(0)} P_\ell^1(\cos\theta) + a \, \frac{\partial v_r^{(0)}}{\partial r} \, P_\ell(\cos\theta) \right) \right|_{r = a} = 0 , \end{gather}$$
$$\begin{gather} \left. v_r^{(0)} + \alpha_\ell \left( v_r^{(1)} + v_\theta^{(0)} P_\ell^1(\cos\theta) + a \, \frac{\partial v_r^{(0)}}{\partial r} \, P_\ell(\cos\theta) \right) \right|_{r = a} = 0 , \end{gather}$$ $$\begin{gather}\left. \sigma_{r\theta}^{(0)} + \alpha_\ell \left( \sigma_{r\theta}^{(1)} + \left( \sigma_{rr}^{(0)} - \sigma_{\theta\theta}^{(0)} \right)P_\ell^1(\cos\theta) + a \, \frac{\partial \sigma_{r\theta}^{(0)}}{\partial r} \, P_\ell(\cos\theta) \right) \right|_{r = a}= 0 . \end{gather}$$
$$\begin{gather}\left. \sigma_{r\theta}^{(0)} + \alpha_\ell \left( \sigma_{r\theta}^{(1)} + \left( \sigma_{rr}^{(0)} - \sigma_{\theta\theta}^{(0)} \right)P_\ell^1(\cos\theta) + a \, \frac{\partial \sigma_{r\theta}^{(0)}}{\partial r} \, P_\ell(\cos\theta) \right) \right|_{r = a}= 0 . \end{gather}$$
Again, we solve the flow problem using Lamb's solution (3.3) and determine the coefficients  $A_n$ and
$A_n$ and  $B_n$ that satisfy the above conditions. The solution for the zeroth-order problem corresponding to an undeformed sphere is obtained by requiring
$B_n$ that satisfy the above conditions. The solution for the zeroth-order problem corresponding to an undeformed sphere is obtained by requiring  $v_r^{(0)} = 0$ and
$v_r^{(0)} = 0$ and  $\sigma _{r\theta }^{(0)} = 0$, which readily leads us to
$\sigma _{r\theta }^{(0)} = 0$, which readily leads us to  $A_1^{(0)} = 1$,
$A_1^{(0)} = 1$,  $B_1^{(0)} = 0$ and
$B_1^{(0)} = 0$ and  $A_n^{(0)}= B_n^{(0)}= 0$ for
$A_n^{(0)}= B_n^{(0)}= 0$ for  $n \geqslant 2$. Thus, at the zeroth order we have
$n \geqslant 2$. Thus, at the zeroth order we have
 \begin{equation} \frac{v_r^{(0)}}{V_{PS}} ={-}\left( 1 - \frac{a}{r} \right) \cos\theta , \quad \frac{v_\theta^{(0)}}{V_{PS}} = \frac{1}{2} \left( 2 - \frac{a}{r} \right)\sin\theta \end{equation}
\begin{equation} \frac{v_r^{(0)}}{V_{PS}} ={-}\left( 1 - \frac{a}{r} \right) \cos\theta , \quad \frac{v_\theta^{(0)}}{V_{PS}} = \frac{1}{2} \left( 2 - \frac{a}{r} \right)\sin\theta \end{equation}which, as expected, is the flow past a spherical air bubble (Happel & Brenner Reference Happel and Brenner1983).
Proceeding to the first order, noting that  $\sigma _{r\theta }^{(0)} = \sigma _{\theta \theta }^{(0)} = 0$ everywhere in the fluid domain, we again find that all the terms except
$\sigma _{r\theta }^{(0)} = \sigma _{\theta \theta }^{(0)} = 0$ everywhere in the fluid domain, we again find that all the terms except  $n =\ell \pm 1$ are zero. The first-order coefficients arising from the effect of
$n =\ell \pm 1$ are zero. The first-order coefficients arising from the effect of  $\alpha _\ell$ are thereby found as
$\alpha _\ell$ are thereby found as
 $$\begin{gather} A_{\ell-1}^{(1)}={-}\cfrac{(\ell+1)(\ell+2)}{(2\ell-1)(2\ell+1)} , \quad A_{\ell+1}^{(1)}=\cfrac{\ell^2+\ell+3}{(2\ell+3)(2\ell+1)} , \end{gather}$$
$$\begin{gather} A_{\ell-1}^{(1)}={-}\cfrac{(\ell+1)(\ell+2)}{(2\ell-1)(2\ell+1)} , \quad A_{\ell+1}^{(1)}=\cfrac{\ell^2+\ell+3}{(2\ell+3)(2\ell+1)} , \end{gather}$$ $$\begin{gather}B_{\ell-1}^{(1)}={-} \cfrac{(\ell-1)(\ell^2+\ell+3)}{2(2\ell-1)(2\ell+1)} , \quad B_{\ell+1}^{(1)}= \cfrac{\ell(\ell-1)(\ell+1)}{2(2\ell+3)(2\ell+1)} . \end{gather}$$
$$\begin{gather}B_{\ell-1}^{(1)}={-} \cfrac{(\ell-1)(\ell^2+\ell+3)}{2(2\ell-1)(2\ell+1)} , \quad B_{\ell+1}^{(1)}= \cfrac{\ell(\ell-1)(\ell+1)}{2(2\ell+3)(2\ell+1)} . \end{gather}$$
These coefficients determine the first-order solution for the flow field with the perfect-slip boundary condition (figure 2b,e,h). From the drag force  $F_{D} = -4{\rm \pi} \mu a A_1 V_{PS}$, we determine the drag coefficient as
$F_{D} = -4{\rm \pi} \mu a A_1 V_{PS}$, we determine the drag coefficient as
 \begin{equation} \frac{{R}_{PS}}{4{\rm \pi}\mu a} = 1 - \frac{4}{5} \, \alpha_2 . \end{equation}
\begin{equation} \frac{{R}_{PS}}{4{\rm \pi}\mu a} = 1 - \frac{4}{5} \, \alpha_2 . \end{equation}
The result is consistent with the calculation for an ellipsoidal particle, where only the deformation mode  $\ell =2$ is present (Chang & Keh Reference Chang and Keh2009), but has a broader validity, as it shows that deformation modes beyond the second do not influence the drag coefficient in linear order.
$\ell =2$ is present (Chang & Keh Reference Chang and Keh2009), but has a broader validity, as it shows that deformation modes beyond the second do not influence the drag coefficient in linear order.
4. Optimal active swimmer
Having derived the solutions of the flow problems for no-slip and perfect-slip boundary conditions, we next make use of these solutions to construct the flow field induced by a self-propelling active microswimmer with minimum dissipation, i.e. the optimal swimmer. As shown in (2.3), the flow field surrounding the optimal swimmer can be reconstructed by a linear superposition of the flow fields of the no-slip and perfect-slip problems, weighted by a specific combination of their drag coefficients.
4.1. Stresslet of the optimal microswimmer
We first evaluate the stresslet of the optimal swimmer and its dipole coefficient. Because both passive flows are expanded in terms of Lamb's solution, their superposition, too, has the same form. A comparison between the flow field in (3.3) and the definition of the stresslet (2.2) shows that only the coefficient  $A_2$ contributes to the stresslet. Specifically, the dipolar contribution to the flow field, which decays as
$A_2$ contributes to the stresslet. Specifically, the dipolar contribution to the flow field, which decays as  $r^{-2}$, reads
$r^{-2}$, reads  ${\boldsymbol {v}}/{V} = \frac {3}{2} A_2 ( 3\cos ^2\theta -1 ) ({a}/{r})^2 \boldsymbol {e}_r$, which indicates that the dipole coefficient must be
${\boldsymbol {v}}/{V} = \frac {3}{2} A_2 ( 3\cos ^2\theta -1 ) ({a}/{r})^2 \boldsymbol {e}_r$, which indicates that the dipole coefficient must be  $\beta = -(3/2) A_2$. Note that
$\beta = -(3/2) A_2$. Note that  $A_2^{(1)} \ne 0$ only for
$A_2^{(1)} \ne 0$ only for  $\ell \in \{ 1,3 \}$ and here we have set
$\ell \in \{ 1,3 \}$ and here we have set  $\alpha _1=0$, so in the perturbative expansion the dipole coefficient evaluates to
$\alpha _1=0$, so in the perturbative expansion the dipole coefficient evaluates to
 \begin{equation} {\beta} ={-}\frac{3}{2} \, \mathcal{A}_2^{(1)} \alpha_3 , \end{equation}
\begin{equation} {\beta} ={-}\frac{3}{2} \, \mathcal{A}_2^{(1)} \alpha_3 , \end{equation}with
 \begin{equation} \mathcal{A}_2^{(1)}=\frac{R_{NS}}{R_{NS}-R_\textit{PS}} \left[ A_2^{(1)}\right]_{PS}-\frac{R_{PS}}{R_{NS}-R_{PS}}\left[ A_2^{(1)}\right]_{NS} \end{equation}
\begin{equation} \mathcal{A}_2^{(1)}=\frac{R_{NS}}{R_{NS}-R_\textit{PS}} \left[ A_2^{(1)}\right]_{PS}-\frac{R_{PS}}{R_{NS}-R_{PS}}\left[ A_2^{(1)}\right]_{NS} \end{equation}being the corresponding coefficient of the active swimmer, expressed in terms of those of the NS and PS problems.
From (4.1), one can see that the corrections to the drag coefficients  $R_{NS}$ and
$R_{NS}$ and  $R_{PS}$ do not have any contributions to
$R_{PS}$ do not have any contributions to  $\beta$ in the leading order. Equation (4.2) can therefore be evaluated with the drag coefficients of spherical particles. Remarkably, the dipole coefficient, to the leading order, only depends on the third Legendre mode of the shape function (
$\beta$ in the leading order. Equation (4.2) can therefore be evaluated with the drag coefficients of spherical particles. Remarkably, the dipole coefficient, to the leading order, only depends on the third Legendre mode of the shape function ( $\alpha _3$), and other modes have no contribution. Inserting the values of
$\alpha _3$), and other modes have no contribution. Inserting the values of  $A_2^{(1)}$ from the NS and PS calculations into (4.1), we finally arrive at our final solution given in (2.4).
$A_2^{(1)}$ from the NS and PS calculations into (4.1), we finally arrive at our final solution given in (2.4).
4.2. Flow field of the optimal microswimmer
The full velocity field induced by the optimal active microswimmer (figure 2c,f,i) can be obtained up to the linear order in deformation amplitudes by evaluating all coefficients in the same way as shown in (4.2). Thereby, the drag coefficients  $R_\textit {NS}$ and
$R_\textit {NS}$ and  $R_\textit{PS}$ need to be evaluated to linear order, as given in (3.5) and (3.10). In figure 3, the flow fields for some nearly spherical optimal swimmers are shown in the laboratory frame.
$R_\textit{PS}$ need to be evaluated to linear order, as given in (3.5) and (3.10). In figure 3, the flow fields for some nearly spherical optimal swimmers are shown in the laboratory frame.

Figure 3. Streamlines in laboratory frame of optimal swimmers of various shapes. The non-zero surface modes for each swimmer are given at the top of each panel. The colours in the flow field indicate its velocity scaled by the swimming speed of the active particle. The swimmer surface colours represent the slip velocity as in figure 2.
5. Conclusions
In this study we analysed the swimming type of nearly spherical optimal swimmers. We applied the minimum dissipation theorem (Nasouri et al. Reference Nasouri, Vilfan and Golestanian2021) to determine the flow field of the optimal swimmer and to show that the dipole coefficient (or the strength of the stresslet) only depends to leading order on the third mode of the shape function. Thus, depending on the sign of this mode, the optimal swimmer is a puller (when positive), pusher (when negative) or neutral (when zero). Using our results, one can determine the optimal swimming type for surface-driven nearly spherical swimmers by simply describing the shape function in terms of the Legendre expansion and calculating the third mode. Our results can also be applied to phoretic particles which use their surface activity to gain propulsion. For instance, for a chemically active particle, the slip velocity depends on the surface coating pattern which characterizes the chemical activity and mobility rates. For a given nearly spherical phoretic particle, one can then use our results to determine whether that surface coating minimizes the viscous dissipation. In the hydrodynamically optimal case, the dipole coefficient follows from the shape as derived here. We should note that for optimizing phoretic particles, one should also account for the dissipation in the slip layer and the energetics of the chemical reaction (Sabass & Seifert Reference Sabass and Seifert2010, Reference Sabass and Seifert2012), which is not considered here and can be a natural extension to this work.
Our derivation demonstrates how the recently proposed theorem can enable us to find a perturbative explicit solution to a problem that would otherwise hardly be analytically tractable. It is also possible to extend the presented results by accounting for the nonlinear effect of the quadratic and higher-order terms, in which case the contribution of other surface modes will be non-zero. Beyond that, one can use the methodology discussed here to evaluate the swimming type of any optimal swimmer of any arbitrary shape, provided the flow fields for the no-slip and perfect-slip problems are known.
Funding
This work was supported by the Deutsche Forschungsgemeinschaft (A.D.M.I., grant number DA 2107/1-1); Slovenian Research Agency (A.V., grant number P1-0099); and the Max Planck Society.
Declaration of interests
The authors report no conflicts of interest.








 Open access
Open access