



No CrossRef data available.
Published online by Cambridge University Press: 22 December 2023
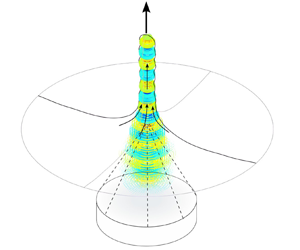
Applying a focused ultrasonic field on a free liquid surface results in its growth eventually leading to the so-called acoustic fountain. In this work, a numerical approach is presented to further increase the understanding of the acoustic fountain phenomenon. The developed simulation method enables the prediction of the free surface motion and the dynamic acoustic field in the moving liquid. The dynamic system is a balance between inertia, surface tension and the acoustic radiation force, and its nonlinearity is demonstrated by studying the relation between the ultrasonic excitation amplitude and corresponding liquid deformation. We show that dynamic resonance is the main mechanism causing the specific acoustic fountain shapes, and the analysis of the dynamic acoustic pressure allows us to predict Faraday-instability atomisation. We show that strong resonance peaks cause atomisation bursts and strong transient deformations corresponding to previously reported experimental observations. The quantitative prediction of the dynamic acoustic pressure enables us to assess the potential of cavitation generation in acoustic fountains. The observed local high acoustic pressures above both the cavitation and the atomisation threshold hint at the coexistence of these two phenomena in acoustic fountains.


To send this article to your Kindle, first ensure no-reply@cambridge.org is added to your Approved Personal Document E-mail List under your Personal Document Settings on the Manage Your Content and Devices page of your Amazon account. Then enter the ‘name’ part of your Kindle email address below. Find out more about sending to your Kindle. Find out more about saving to your Kindle.
Note you can select to save to either the @free.kindle.com or @kindle.com variations. ‘@free.kindle.com’ emails are free but can only be saved to your device when it is connected to wi-fi. ‘@kindle.com’ emails can be delivered even when you are not connected to wi-fi, but note that service fees apply.
Find out more about the Kindle Personal Document Service.
To save this article to your Dropbox account, please select one or more formats and confirm that you agree to abide by our usage policies. If this is the first time you used this feature, you will be asked to authorise Cambridge Core to connect with your Dropbox account. Find out more about saving content to Dropbox.
To save this article to your Google Drive account, please select one or more formats and confirm that you agree to abide by our usage policies. If this is the first time you used this feature, you will be asked to authorise Cambridge Core to connect with your Google Drive account. Find out more about saving content to Google Drive.