








Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
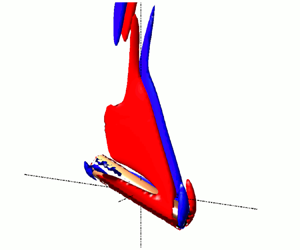
Bouchet, G.
and
Dušek, J.
2025.
Freely falling cylinders of length to diameter ratio around one.
International Journal of Multiphase Flow,
Vol. 184,
Issue. ,
p.
105097.