


I. INTRODUCTION
The increasing demand for high-resolution videos, together with limited transmission and memory capacity, is still driving the research on video compression. As a core technique in the state-of-the-art video codecs such as High Efficiency Video Coding (HEVC, [Reference Sullivan, Ohm, Han and Wiegand1]) a hybrid approach with block-based architecture is used. The term “hybrid” [Reference Netravali and Limb2] refers to a combination of prediction from previous decoded frames (inter) or adjacent decoded blocks from the frame itself (intra prediction) together with transform coding of the resulting residual. Thus, the quality of the prediction signal has a large influence on the efficiency of video codecs. In this paper, a method first introduced in [Reference Rasch, Pfaff, Schäfer, Schwarz, Winken, Siekmann, Marpe and Wiegand3] based on the state-of-the-art mathematical denoising techniques is elaborated in more detail. The central idea of this method is to construct two types of prediction filters in order to improve prediction signals in a block-wise manner: a uniform diffusion filter using a fixed filter mask and a signal adaptive diffusion filter that incorporates the structures of the underlying prediction signal.
In particular, the employed techniques here come from the field of image smoothing for denoising and use Partial Differential Equation (PDE)-based methods. In the context of video coding, linear inpainting methods have been employed to replace intra prediction modes in general [Reference Andris, Peter and Weickert4,Reference Liu, Sun, Wu and Zhang5] or particular ones such as the planar prediction [Reference Zhang and Lin6,Reference Doshkov, Ndjiki-Nya, Lakshman, Köppel and Wiegand7]. Due to their diffusion properties, these methods have the disadvantage that they cannot prolong edges well and are therefore not suitable to replace angular prediction modes. This is the reason why in this paper instead of replacing the prediction, the prediction provided by the video codec is chosen as initial condition.
Figure 1 shows a block diagram of a classic hybrid video encoder with enclosed decoder depicting the newly introduced additional prediction filter step that is applied on top of the selected prediction signal. So far, little work has been published on tools increasing the efficiency of the codec that operate at this particular location. Classically [Reference Lainema, Han, Sze, Budagavi and Sullivan8], linear filtering techniques have been applied to the reference samples before predicting to improve intra prediction. Furthermore after predicting, modern video codecs employ linear smoothing techniques for certain intra prediction modes, which are only applied on the block boundaries (boundary smoothing, see [Reference Lainema, Han, Sze, Budagavi and Sullivan8,Reference Minezawa, Sugimoto and Sekiguchi9]).

Fig. 1. Block diagram of a hybrid video encoder with newly introduced prediction filter and enclosed decoder
In case of inter, most methods to improve prediction operate directly at the generation of the prediction block [Reference Bross, Helle, Lakshman, Ugur, Sze, Budagavi and Sullivan10]: Weighted prediction approaches that superimpose different reference blocks can be applied to increase the accuracy of the current prediction, for example. Another classical method are the so-called interpolation filters, that use fixed sets of filter coefficients to interpolate in between the samples of the reference block(s) to generate fractional samples for an accurate inter prediction. In [Reference Wedi11], adaptive interpolation filter coefficients have been proposed which are fitted and signaled frame by frame.
Well-known post-prediction methods have been suggested for the new video compression standard using affine linear models to compensate local illumination changes [Reference Kamikura, Watanabe, Jozawa, Kotera and Ichinose12,Reference López, Kim, Ortega and Chen13]. As the methods established in [Reference Rasch, Pfaff, Schäfer, Schwarz, Winken, Siekmann, Marpe and Wiegand3] and used here, this tool operates on the prediction signal.
The methods used here are signal adaptive in the sense that they have various configurations which are signaled block-wise. Thereby, they fit into the framework of classic video coding tools. Additionally, they are signal adaptive in the sense that the filter coefficients used depend on the underlying prediction signal.
The employed mathematical methods originate from image smoothing using PDE-based methods. One of the key challenges there is to filter out noise while keeping edges intact. Perona and Malik [Reference Perona and Malik14] suggested a non-linear diffusion method to avoid the blurring effects of linear smoothing.
Using a non-linear anisotropic diffusion model, interesting advances have been made on the topic of PDE-based image compression [Reference Galic, Weickert, Welk, Bruhn, Belyaev and Seidel15]. The authors of [Reference Galic, Weickert, Welk, Bruhn, Belyaev and Seidel15] compress images by firstly removing less significant samples from the image and then writing the remaining ones into a data stream. Secondly, to decode the picture, a generalized anisotropic Perona–Malik model is used to interpolate between the remaining sparse samples and thereby obtain a reconstruction of the original picture. Thus, in this case, the authors of [Reference Galic, Weickert, Welk, Bruhn, Belyaev and Seidel15] establish a kind of data compression by having to write less samples. In [Reference Köstler, Stürmer, Freundl and Rüde16,Reference Peter, Schmaltz, Mach, Mainberger and Weickert17], these ideas are transferred to videos.
In contrast to that, in this paper, the anisotropic diffusion model is built into the framework of a hybrid video codec: The prediction filters make use of the a priori structural knowledge contained in the selected prediction signal. The anisotropic diffusion model is used to develop a highly signal adaptive prediction filter in order to improve the embodied prediction and thereby enhancing the coding efficiency.
This paper is organized as follows. In Section II an overview of the current state-of-the-art in video coding is given. In Section III, we will describe the PDE-based filtering approaches in a continuous setting and use them to construct a uniform and a signal adaptive prediction filter for video coding. Compared to [Reference Rasch, Pfaff, Schäfer, Henkel, Schwarz, Marpe and Wiegand18] and [Reference Rasch, Pfaff, Schäfer, Schwarz, Winken, Siekmann, Marpe and Wiegand3], more details on the specific discrete implementation are given and the idea of the signal adaptive filtering is shown geometrically on a particular example. In Section IV, the employed experimental setup is described in detail. In contrast to [Reference Rasch, Pfaff, Schäfer, Schwarz, Winken, Siekmann, Marpe and Wiegand3], which was built into HEVC, here, the filter method is embedded into a software based on HEVC which uses a QTBT with MTT block structure (see subsection IV.A for more details). The impact of the filters is shown exemplarily on an intra prediction block. Additionally when compared to [Reference Rasch, Pfaff, Schäfer, Henkel, Schwarz, Marpe and Wiegand18] and [Reference Rasch, Pfaff, Schäfer, Schwarz, Winken, Siekmann, Marpe and Wiegand3], in Section V, the meaning of the required parameters for the filter method is explained and illustrated. Furthermore, certain parameters are tested thoroughly using encoder-based tests, where the individual cost improvement is saved and later used to determine an improved parameter selection which leads to enhanced bitrate savings.
In this paper, as in [Reference Rasch, Pfaff, Schäfer, Henkel, Schwarz, Marpe and Wiegand18] and [Reference Rasch, Pfaff, Schäfer, Schwarz, Winken, Siekmann, Marpe and Wiegand3], the diffusion filters are implemented such that they use the reconstructed samples on the boundary where they are applicable. In contrast to [Reference Rasch, Pfaff, Schäfer, Henkel, Schwarz, Marpe and Wiegand18] and [Reference Rasch, Pfaff, Schäfer, Schwarz, Winken, Siekmann, Marpe and Wiegand3], here in Section VI, additionally, an alternative is shown which avoids accessing the reconstructed samples in the inter case: A Neumann boundary condition is implemented and tested empirically. In a discrete setting, this means that the samples are mirrored across the boundary. It is shown that the alternative boundary condition only affects the bitrate savings to a very small degree.
Eventually, in Section VII, we show results of up to $1.74 \%$ bitrate savings for All Intra at $43 \%$
bitrate savings for All Intra at $43 \%$ encoding and $19 \%$
encoding and $19 \%$ decoding complexity increase. In case of Random Access, $2.27 \%$
decoding complexity increase. In case of Random Access, $2.27 \%$ bitrate savings are achieved at $19 \%$
bitrate savings are achieved at $19 \%$ encoding and $17 \%$
encoding and $17 \%$ decoding complexity increase. For individual UHD sequences, the method yields up to $7.36 \%$
decoding complexity increase. For individual UHD sequences, the method yields up to $7.36 \%$ bitrate savings for Random Access. Note that these results include the complexity reductions like the restriction on certain block sizes as described in [Reference Rasch, Pfaff, Schäfer, Henkel, Schwarz, Marpe and Wiegand18].
bitrate savings for Random Access. Note that these results include the complexity reductions like the restriction on certain block sizes as described in [Reference Rasch, Pfaff, Schäfer, Henkel, Schwarz, Marpe and Wiegand18].
II. STATE-OF-THE-ART VIDEO CODING
The standardization of video coding technology plays a major role in the broad adoption and growing popularity of video technology. The main purpose of a video coding standard is to define the interface between encoder and decoder to ensure interoperability among a wide range of devices. Video coding standards are designed to provide a maximal degree of freedom for the manufacturers to adapt the encoder to specific applications. More details can be found in [Reference Wiegand and Schwarz19].
All modern video codecs use the concept of hybrid coding. The term “hybrid” goes as far back as to the 1980s [Reference Netravali and Limb2] and describes a combination of two fundamental concepts of video coding, predictive coding, and transform coding. The basic architecture of a hybrid video encoder together with an enclosed decoder is shown in Fig. 1, additionally depicting the new prediction filter step proposed here. The flow of the encoder is depicted using continuous lines.
For the sake of simplicity, here, we will describe the encoder only. Note that the standard does not imply a specific encoding approach. The following is to be read as an example of a particular encoder such as can be found in [20].
The video signal is divided into pictures and the pictures are split into blocks. Typically, the picture is divided into macroblocks of a fixed size consisting of a luma and two corresponding chroma components. In HEVC [Reference Sullivan, Ohm, Han and Wiegand1], the picture is divided into coding tree units (CTUs) of a size selected using a configuration parameter in the encoder. A CTU consists of a luma coding tree block (CTB) and two corresponding chroma CTBs. A CTB may contain only one coding unit (CU) or may be split into several CUs using a quadtree decomposition.
Assuming there are already reconstructed blocks in the picture storage, a prediction for the current block is formed using preceding blocks. If those blocks are spatially adjacent, the resulting prediction is called intra prediction. If they are taken from already reconstructed pictures, i.e. are temporally preceding, one speaks of inter prediction. The decision if intra or inter prediction is used is taken on CU level. To optimize the usage of already reconstructed pictures in the inter case, a motion estimation is performed. The residual between the prediction and the original block is calculated, transformed, and quantized using a certain quantization parameter (QP). The resulting coefficients are fed into the entropy coder. The entropy coder typically uses either variable-length coding (VLC) (e.g. Huffman codes [Reference Huffman21]) or arithmetic coding (e.g. context-based adaptive binary arithmetic coding – CABAC [Reference Marpe, Schwarz and Wiegand22]). To obtain the reconstructed samples, the quantized transform coefficients are rescaled and retransformed. Note that due to the quantization process, a loss of information takes place. Therefore, the reconstruction differs from the original. The reconstructed blocks are loop filtered and stored in the picture buffer where they are used to predict the following blocks.
III. MATHEMATICAL FRAMEWORK OF THE DIFFUSION FILTER
This section is primarily a review chapter and introduces the mathematical models to be used. Furthermore, it is described how these models are applied in the setting of video coding which is the main contribution of this paper. Here, the different types of uniform and signal adaptive diffusion models are described in a continuous setting. It is known that in a general, continuous setting, the problems that will be described in subsection B are not uniquely or not at all solvable. In a discrete setting, Weickert [Reference Weickert23] has shown that they are uniquely solvable which makes the models suitable for our application.
A) Uniform diffusion model
In this subsection, a uniform diffusion model is described which originates from image smoothing. According to [Reference Weickert;, Ishikawa; and Imiya:24], such approaches were first introduced in 1959 in Japan [Reference Iijima25]. This approach is a special case of the anisotropic case that will be presented in the sequel.
In order to use uniform diffusion in the context of video coding, let f be an image in $\mathbb {R}^2$ consisting of the given prediction block extended using the reconstructed pixels on the left and upper side. Then, we let the function $u \colon \mathbb {R}^2 \times \mathbb {R} \to \mathbb {R}$
consisting of the given prediction block extended using the reconstructed pixels on the left and upper side. Then, we let the function $u \colon \mathbb {R}^2 \times \mathbb {R} \to \mathbb {R}$ be a solution of
be a solution of

with the initial condition

and boundary conditions

for time $t\in [0,\infty )$ , where ν denotes the outer normal and $\Gamma =\Gamma _1 \cup \Gamma _2$
, where ν denotes the outer normal and $\Gamma =\Gamma _1 \cup \Gamma _2$ the boundary of the prediction block. The upper and left boundary of the prediction block is denoted by $\Gamma _1$
the boundary of the prediction block. The upper and left boundary of the prediction block is denoted by $\Gamma _1$ and the lower and right boundary by $\Gamma _2$
and the lower and right boundary by $\Gamma _2$ . Operator div denotes the divergence. The first boundary condition in Eq. (3) is chosen since in the application of video coding, the reconstructed samples on the upper and left sides are known. Here, the parameter t represents the duration of the filtering process and determines the strength of the filter.
. Operator div denotes the divergence. The first boundary condition in Eq. (3) is chosen since in the application of video coding, the reconstructed samples on the upper and left sides are known. Here, the parameter t represents the duration of the filtering process and determines the strength of the filter.
The gradient is implemented using finite differences. Since $\mathrm {div} (\nabla u(x,t)) = \Delta u(x,t)$ , Eq. (1) coincides with the heat equation. Solution u is a filtered version of the initial prediction f. The prediction in the codec is then replaced by its filtered descendant u restricted on the area of the prediction block.
, Eq. (1) coincides with the heat equation. Solution u is a filtered version of the initial prediction f. The prediction in the codec is then replaced by its filtered descendant u restricted on the area of the prediction block.
Define the forward/backward differences operators as

and

for unit vectors $e_i$ , $i\in \{1,2\}$
, $i\in \{1,2\}$ and step size h>0. Operator $\mathcal {D}_{x_2}^\pm$
and step size h>0. Operator $\mathcal {D}_{x_2}^\pm$ is defined analogously using unit vector $e_2 = (0,1)^T \in \mathbb {R}^2$
is defined analogously using unit vector $e_2 = (0,1)^T \in \mathbb {R}^2$ . To discretize the time derivation, define
. To discretize the time derivation, define

for parameter $\tau >0$ . Now, Eq. (1) can be discretized as follows
. Now, Eq. (1) can be discretized as follows

For sample x inside the block, Eq. (5) for $\tau =0.25$ results in
results in

In the discrete implementation, it is used that the latter can also be expressed as t-times correlating the initial prediction $u(x,0) = f(x)$ with the symmetric filter mask
with the symmetric filter mask

i.e.

Note that since h is a symmetric filter mask, correlation is equivalent to convolution.
An obvious disadvantage of this uniform smoothing is the fact that it does not only smooth noise, but also attenuates important features in the underlying image such as edges. This unwanted behavior can be prevented by using adaptive smoothing methods: Using this idea coming from image processing, we construct a filter which itself depends on local properties of the image – in our case the underlying prediction.
B) Anisotropic diffusion model
In order to identify features such as corners or to measure the local coherence of edges, the following model does not only consider the norm of the gradient but also takes its direction into account: Diffusion along edges should be preferred over diffusion perpendicular to them. To realize the combination of these aspects, a diffusion tensor which is based on the matrix $\nabla u \nabla u^T$ can be constructed as suggested by Cottet and Germain [Reference Cottet and Germain26]. To avoid that noise contained in the image perturbs the edge selection process, the idea of Catté et al. [Reference Catté, Lions, Morel and Coll27] in the context of image restoration is transferred to the matrix $\nabla u \nabla u ^T$
can be constructed as suggested by Cottet and Germain [Reference Cottet and Germain26]. To avoid that noise contained in the image perturbs the edge selection process, the idea of Catté et al. [Reference Catté, Lions, Morel and Coll27] in the context of image restoration is transferred to the matrix $\nabla u \nabla u ^T$ : matrix $\nabla u \nabla u ^T$
: matrix $\nabla u \nabla u ^T$ can be replaced by the Gaussian smoothed version
can be replaced by the Gaussian smoothed version

with a Gaussian kernel $K_\sigma$ and standard deviation $\sigma \geq 0$
and standard deviation $\sigma \geq 0$ . The correlation $*$
. The correlation $*$ of $K_\sigma$
of $K_\sigma$ with $\nabla u \nabla u ^T$
with $\nabla u \nabla u ^T$ is to be understood componentwise. Then, a matrix valued function $\tilde {q}(J_\sigma ) \colon \mathbb {R}^{2\times 2} \to \mathbb {R}^{2\times 2}$
is to be understood componentwise. Then, a matrix valued function $\tilde {q}(J_\sigma ) \colon \mathbb {R}^{2\times 2} \to \mathbb {R}^{2\times 2}$ can be defined which is referred to as diffusion tensor. In our application in video coding, the time update is neglected and $\nabla u \nabla u^T$
can be defined which is referred to as diffusion tensor. In our application in video coding, the time update is neglected and $\nabla u \nabla u^T$ in the function $\tilde {q}(J_\sigma )$
in the function $\tilde {q}(J_\sigma )$ is replaced by $\nabla f \nabla f^T$
is replaced by $\nabla f \nabla f^T$ .
.
Using this, the anisotropic diffusion model reads

with initial (2) and boundary conditions (3) as above. The model described in this subsection leads (under certain conditions) to a uniquely solvable problem (see [Reference Rasch, Pfaff, Schäfer, Henkel, Schwarz, Marpe and Wiegand18]). Note that for $t \to \infty$ , Eq. (6) converges to a steady state independently of the initial condition which is an inpainting solution [Reference Weickert23]. But for $t << \infty$
, Eq. (6) converges to a steady state independently of the initial condition which is an inpainting solution [Reference Weickert23]. But for $t << \infty$ , the solution u can be understood as a smoothed version of prediction f. This makes it feasible for our application in video coding.
, the solution u can be understood as a smoothed version of prediction f. This makes it feasible for our application in video coding.
Since

is a real symmetric matrix, it is diagonalizable by orthogonal matrices S. As shown below, the application of the matrix valued function $\tilde {q}$ on $J_{\sigma }$
on $J_{\sigma }$ is well defined by applying a suitable function q to its eigenvalues $\lambda _1$
is well defined by applying a suitable function q to its eigenvalues $\lambda _1$ , $\lambda _2$
, $\lambda _2$ , i.e.
, i.e.

Two different possibilities are considered here, which have been empirically tested.
i) A way of choosing $\tilde {q}$
 is the following: Since $J_{\sigma }$ is diagonalizable, the term $I+J_{\sigma }^2$ is invertible and can be represented by an absolutely convergent power series
\[ (I+J_{\sigma}^2)^{-1} =\sum_{k=0}^\infty \alpha_k J_{\sigma} ^{2k},\]with certain coefficients $\alpha _k$
. Here, I denotes the identity matrix. Now, choose function $\tilde {q}$ as
\[ \tilde{q}(J_{\sigma}) = (I+J_{\sigma}^2)^{-1}.\]Since $J_{\sigma }$
is diagonalizable, there exists an invertible matrix S such that $\Lambda = S^{-1} J_{\sigma } S$, where Λ is a diagonal matrix consisting of the eigenvalues $\lambda _1$, $\lambda _2$. It holds that
\begin{align*} (I+J_{\sigma}^2)^{-1} &=\sum_{k=0}^\infty \alpha_k (S\Lambda S^{-1}) ^{2k} \\ &= S (I+\Lambda ^2)^{-1} S^{-1}. \end{align*}The term $(I+\Lambda ^2)^{-1}$
is defined by applying ${1}/({1+(\cdot )^2})$ to the entries of the diagonal matrix Λ.
is the following: Since $J_{\sigma }$ is diagonalizable, the term $I+J_{\sigma }^2$ is invertible and can be represented by an absolutely convergent power series
\[ (I+J_{\sigma}^2)^{-1} =\sum_{k=0}^\infty \alpha_k J_{\sigma} ^{2k},\]with certain coefficients $\alpha _k$
. Here, I denotes the identity matrix. Now, choose function $\tilde {q}$ as
\[ \tilde{q}(J_{\sigma}) = (I+J_{\sigma}^2)^{-1}.\]Since $J_{\sigma }$
is diagonalizable, there exists an invertible matrix S such that $\Lambda = S^{-1} J_{\sigma } S$, where Λ is a diagonal matrix consisting of the eigenvalues $\lambda _1$, $\lambda _2$. It holds that
\begin{align*} (I+J_{\sigma}^2)^{-1} &=\sum_{k=0}^\infty \alpha_k (S\Lambda S^{-1}) ^{2k} \\ &= S (I+\Lambda ^2)^{-1} S^{-1}. \end{align*}The term $(I+\Lambda ^2)^{-1}$
is defined by applying ${1}/({1+(\cdot )^2})$ to the entries of the diagonal matrix Λ.ii) As a special case of case (i), function $\tilde {q}$
can be chosen as
\[ \tilde{q}(J_{\sigma}) = \mathrm{exp}(J_{\sigma}).\]By definition, it holds that
\[ \mathrm{exp}(J_{\sigma}) = \sum_{k=0}^\infty \frac{1}{k!}J_{\sigma}^k.\]This series always converges, thus $\mathrm {exp}(J_{\sigma })$
is well defined. Then, it holds
\[ \mathrm{exp}(J_{\sigma}) = \sum_{k=0}^\infty \frac{1}{k!}(S\Lambda S^{-1})^k =S\ \mathrm{exp}(\Lambda )S^{-1},\]where S, Λ are defined as above. Thus, the term $\mathrm {exp}(\Lambda )$
is well defined as the application of the exponential function to the entries on the diagonal.




















Therefore, the application of $\tilde {q}$ is well defined as the application of the following functions q on the eigenvalues of $J_{\sigma }$
is well defined as the application of the following functions q on the eigenvalues of $J_{\sigma }$ : Empirically, it has been decided that it is reasonable in case of intra to chose q as
: Empirically, it has been decided that it is reasonable in case of intra to chose q as

which corresponds to case (ii) and in case of inter as

which corresponds to case (i). The two functions q are tabulated using integer look-up tables.
More details on the choice of parameter μ and the underlying empirical tests are given in Section V.
The finite discretization of Eq. (6) can be realized by the following ordered steps:
1) Calculate discrete samples differences
\[ EW(x) := (\mathcal{D}_{x_1}^+ + \mathcal{D}_{x_1}^-)u(x,t)\]and
\[ NS(x) := (\mathcal{D}_{x_2}^+ + \mathcal{D}_{x_2}^-)u(x,t)\]for every sample $x \in \mathbb {R}^2$
and a fixed iteration step $t \in \mathbb {R}$.2) Calculate products $(EW \cdot EW)(x)$
, $(EW \cdot NS)(x)$, $(NS \cdot NS)(x)$.3) Filter the three products with filter kernel $K_\sigma$
for obtaining the gradient arrays $g_{11}(x)$, $g_{12}(x)$, and $g_{22}(x)$ defined in Eq. (7).4) Determine the eigenvalues $\lambda _1 (x)$
, $\lambda _2 (x)$ using look-up tables.5) Apply a function q set as Eqs. (9) or (10) to the eigenvalues using pre-defined look-up tables.
6) Calculate S and $S^T$
to derive the integer entries of the diffusion tensor $\tilde {q}(J_\sigma )$ as in Eq. (8) using look-up tables.7) Derive the integer weighting arrays $w_N$
, $w_S$, $w_W$, $w_E$, $w_{01}$, $w_{02}$, $w_{03}$, and $w_{04}$ using sample averages and set
\begin{align*} u(x,t+\tau) &= u(x,t) + \tau \Big(\, w_E \big(u(x+he_1,t) -u(x,t)\big) \\ &\quad + w_W \big(u(x-he_1,t)-u(x,t)\big) \\ &\quad+ w_{01}\, u(x+he_1+he_2,t)\\ &\quad- w_{02}\, u(x+he_1-he_2,t)\\ &\quad- w_{03}\, u(x-he_1+he_2,t) \\ &\quad+ w_{04}\, u(x-he_1-he_2,t) \\ &\quad+ w_N \big(u(x+he_2,t) - u(x,t)\big) \\ &\quad+ w_S \big(u(x-he_2,t)-u(x,t)\big) \, \Big), \end{align*}for time discretization parameter τ.
























C) The geometric meaning of the diffusion tensor
By definition, applying the linear transform $J_\sigma$ to its eigenvectors $ev_i$
to its eigenvectors $ev_i$ , a scaling of the eigenvector by the corresponding eigenvalue occurs, i.e. $J_\sigma ev_i = \lambda _i ev_i$
, a scaling of the eigenvector by the corresponding eigenvalue occurs, i.e. $J_\sigma ev_i = \lambda _i ev_i$ for i=1,2. The eigenvalue with the largest absolute value of its corresponding eigenvalue is called major eigenvector. In Fig. 2, the major eigenvectors of $J_\sigma$
for i=1,2. The eigenvalue with the largest absolute value of its corresponding eigenvalue is called major eigenvector. In Fig. 2, the major eigenvectors of $J_\sigma$ scaled by their eigenvalues are depicted for an example image. As can be seen, the major eigenvectors point to the direction perpendicular to the main edge. Through the scaling with the corresponding eigenvalues, the vectors are larger and become more visible at the locations where the underlying image has strong edges. Therefore, by applying the functions q suggested above to the eigenvalues of $J_\sigma$
scaled by their eigenvalues are depicted for an example image. As can be seen, the major eigenvectors point to the direction perpendicular to the main edge. Through the scaling with the corresponding eigenvalues, the vectors are larger and become more visible at the locations where the underlying image has strong edges. Therefore, by applying the functions q suggested above to the eigenvalues of $J_\sigma$ , the diffusion solving Eq. (6) becomes small at these points.
, the diffusion solving Eq. (6) becomes small at these points.

Fig. 2. Left: original image, right: major eigenvectors of $J_\sigma$ scaled by their eigenvalues.
scaled by their eigenvalues.
IV. IMPLEMENTATION AND EXPERIMENTAL SETUP
A) Experimental setup
In this paper, the presented tools are implemented into a software based on HEVC [Reference Wieckowski, Hinz, George, Brandenburg, Ma, Bross, Schwarz, Marpe and Wiegand28] that includes an additional QTBT block structure and MTT partitioning: That means that the quadtree structure of HEVC is replaced by a Quadtree plus Binary Tree (QTBT, [Reference Chen, Alshina, Sullivan, Ohm and Boyce29]) block structure. An example for a QTBT partitioning is shown in Fig. 3. The CTUs are firstly divided in a quadtree manner and then further partitioned using a binary tree structure. QTBT allows more flexibility in the shape of the CU structure which can be rectangularly shaped now instead of only squared. In order to better capture objects in the center of blocks, instead of the binary partitioning the so-called Multi-Type-Tree (MTT) partitioning [Reference Li, Chuang, Chen, Karczewicz, Zhang, Zhao and Said30] is used here. In addition to quad-tree splitting and binary vertical and horizontal splitting, MTT introduces horizontal and vertical center-side triple-tree partitionings as depicted in Fig. 4.

Fig. 3. Illustration of a QTBT structure, taken from [Reference Wang, Wang, Zhang, Wang and Ma31], ©2017 IEEE.

Fig. 4. Multi-Type-Tree structure, (a) quad-tree partitioning, (b) vertical binary-tree partitioning, (c) horizontal binary-tree partitioning, (d) vertical center-side triple-tree partitioning, (e) horizontal center-side triple-tree partitioning.
All other non-HEVC tools in [Reference Wieckowski, Hinz, George, Brandenburg, Ma, Bross, Schwarz, Marpe and Wiegand28] are turned off. The tests are configured using an All Intra (AI) configuration where only intra pictures are sent and a Random Access (RA) configuration. The corresponding configuration files can be found at [32]. To avoid long test runs, for some preliminary results, the number of frames has been limited to one frame for AI and 17 frames for RA. For the final results in Section VII however, full sequence runs were shown.
In this paper, the bitrate savings – also referred to as rate-distortion (RD) gains – are generally measured in terms of Bjøntegaard delta (BD) bitrate [Reference Bjøntegaard33]. If not stated otherwise, per default quantization parameters $QP \in \{22,27,32,37\}$ are used. Additionally, simulations are run for the $QP \in \{27, 32, 37, 42\}$
are used. Additionally, simulations are run for the $QP \in \{27, 32, 37, 42\}$ , which is a standard method [Reference Albrecht, Bartnik, Bosse, Brandenburg, Bross, Erfurt, George, Haase, Helle, Helmrich, Henkel, Hinz, De-Luxán-Hernández, Kaltenstadler, Keydel, Kirchhoffer, Lehmann, Lim, Ma, Maniry, Marpe, Merkle, Nguyen, Pfaff, Rasch, Rischke, Rudat, Schäfer, Schierl, Schwarz, Siekmann, Skupin, Stallenberger, Stegemann, Sühring, Tech, Venugopal, Walter, Wieckowski, Wiegand and Winken34,Reference Ma, Wieckowski, George, Hinz, Brandenburg, De-Luxán-Hernández, Kichhoffer, Skupin, Schwarz, Marpe, Schierl and Wiegand35]. The latter set of QP values represents a better approximation of achieving the bitrates specified in the CfP (Call for proposals of the international community for video coding standardization, [Reference Segall, Baroncini, Boyce, Chen and Suzuki36]). Note that there is a logarithmic relationship between QP and stepsize, i.e. $stepsize = \Delta 2^{\lfloor {QP}/{6} \rfloor }$
, which is a standard method [Reference Albrecht, Bartnik, Bosse, Brandenburg, Bross, Erfurt, George, Haase, Helle, Helmrich, Henkel, Hinz, De-Luxán-Hernández, Kaltenstadler, Keydel, Kirchhoffer, Lehmann, Lim, Ma, Maniry, Marpe, Merkle, Nguyen, Pfaff, Rasch, Rischke, Rudat, Schäfer, Schierl, Schwarz, Siekmann, Skupin, Stallenberger, Stegemann, Sühring, Tech, Venugopal, Walter, Wieckowski, Wiegand and Winken34,Reference Ma, Wieckowski, George, Hinz, Brandenburg, De-Luxán-Hernández, Kichhoffer, Skupin, Schwarz, Marpe, Schierl and Wiegand35]. The latter set of QP values represents a better approximation of achieving the bitrates specified in the CfP (Call for proposals of the international community for video coding standardization, [Reference Segall, Baroncini, Boyce, Chen and Suzuki36]). Note that there is a logarithmic relationship between QP and stepsize, i.e. $stepsize = \Delta 2^{\lfloor {QP}/{6} \rfloor }$ for a parameter $\Delta >0$
for a parameter $\Delta >0$ ([Reference Wien37, p. 214]). Therefore, the adding of QP 42 doubles the stepsize. Since the rate distortion curve is well defined for four QPs and QPs much higher than 42 are visually not acceptable and QPs much lower than 22 not distinguishable, the range of practically feasible bitrates is quite well covered using the sets $QP \in \{22,27,32,37\}$
([Reference Wien37, p. 214]). Therefore, the adding of QP 42 doubles the stepsize. Since the rate distortion curve is well defined for four QPs and QPs much higher than 42 are visually not acceptable and QPs much lower than 22 not distinguishable, the range of practically feasible bitrates is quite well covered using the sets $QP \in \{22,27,32,37\}$ and $QP \in \{27, 32, 37, 42\}$
and $QP \in \{27, 32, 37, 42\}$ . Accordingly, throughout the paper we test and report for the five QP values 22,27,32,37,42.
. Accordingly, throughout the paper we test and report for the five QP values 22,27,32,37,42.
The results are shown with respect to the luma component Y and the chroma components U and V. Even though the introduced methods are only applied on the luma signal for complexity reasons, the results for the chroma components are shown as well here. This is not only for the sake of completeness but also to ensure that there is no major efficiency loss in the chroma components.
The test sequences for the All Intra (AI) and Random Access (RA) configurations are selected in a way that they represent the impact of the tool well. Therefore, the sequences for AI and RA differ slightly. To ensure a certain variety in the employed test set, at least one test sequence out of each sequence class 4K Panorama, 4K HDR (High Dynamic Range), 4K UHD (Ultra High Definition), and HD (High Definition) is included in the depicted test results.
B) Implementation
The encoder features a uniform version of the filter and a signal adaptive version as described above. The filters are applied on the luminance signal. The uniform filters apply a fixed filter mask (as elaborated in subsection III.A), while the signal adaptive filters as in subsection III.B use the underlying prediction signal to control the direction of the smoothing. While the latter preserves sharp edges in the prediction signal, the uniform version is less complex.
The flag for enabling the diffusion filter is tested and sent at CU level. If it is enabled, additionally the type of the diffusion model and the number of iteration steps as shown in Table 1 are signaled by sending the corresponding index. Since for each filter two options for its strength are given, in total, this corresponds to four different filter configurations. This is referred to as “diffusion filter method”. The particular numbers of iteration steps were tested empirically and lead to a good trade-off between complexity and bitrate savings.
Table 1. Overview of diffusion filter types.

In general, the matrix $J_\sigma (\nabla u)$ may be updated in every iteration step. To simplify the solution method and to make it complexity wise feasible for the state-of-the-art video coding, we neglect this update and set $J_\sigma = J_\sigma (\nabla f)$
may be updated in every iteration step. To simplify the solution method and to make it complexity wise feasible for the state-of-the-art video coding, we neglect this update and set $J_\sigma = J_\sigma (\nabla f)$ constant for all iterations. Thereby, only the directions implied by the initial prediction signal f are taken into account when applying the anisotropic diffusion filter. This reduces the complexity while maintaining the signal adaptivity – which is a reasonable choice for its application in video coding introduced here.
constant for all iterations. Thereby, only the directions implied by the initial prediction signal f are taken into account when applying the anisotropic diffusion filter. This reduces the complexity while maintaining the signal adaptivity – which is a reasonable choice for its application in video coding introduced here.
C) Example
Figure 5 demonstrates the impact of diffusion filtering on an angular intra prediction block. On the left-hand side, the original intra prediction is depicted. In the middle, one can see the result of the uniform diffusion filter. On the right, the result of applying the signal adaptive diffusion filter is shown. It can be observed that the latter smooths the area in the bottom right corner of the prediction block in the same way as the uniform one. But while the uniform filter attenuates the edges of the underlying prediction, the signal adaptive filter preserves them.
V. PARAMETER TESTS
To better understand the meaning of the edge parameter μ, it is reasonable to look at the one-dimensional case (similarly as has been done in [Reference Demirkaya, Asyali and Sahoo38]). Then, $\nabla u = {\partial }/{\partial x} u \in \mathbb {R}$ and Eq. (6) reduces to
and Eq. (6) reduces to

where $\Phi (s)$ denotes the so-called flux function and $\Phi '$
denotes the so-called flux function and $\Phi '$ its spatial derivative. The diffusivity functions q chosen as Eqs. (9) or (10) and its corresponding flux functions are depicted in Figs 6 and 7. Note that $\nabla u \nabla u^T$
its spatial derivative. The diffusivity functions q chosen as Eqs. (9) or (10) and its corresponding flux functions are depicted in Figs 6 and 7. Note that $\nabla u \nabla u^T$ translates to the notation $s^2$
translates to the notation $s^2$ used here. It can be seen that the diffusivity functions are positive and monotonically decreasing for ${\partial }/{\partial x} u >0$
used here. It can be seen that the diffusivity functions are positive and monotonically decreasing for ${\partial }/{\partial x} u >0$ . For ${\partial }/{\partial x} u \to \infty$
. For ${\partial }/{\partial x} u \to \infty$ they converge to zero. Thus, the larger ${\partial }/{\partial x} u$
they converge to zero. Thus, the larger ${\partial }/{\partial x} u$ , the smaller the diffusion becomes.
, the smaller the diffusion becomes.
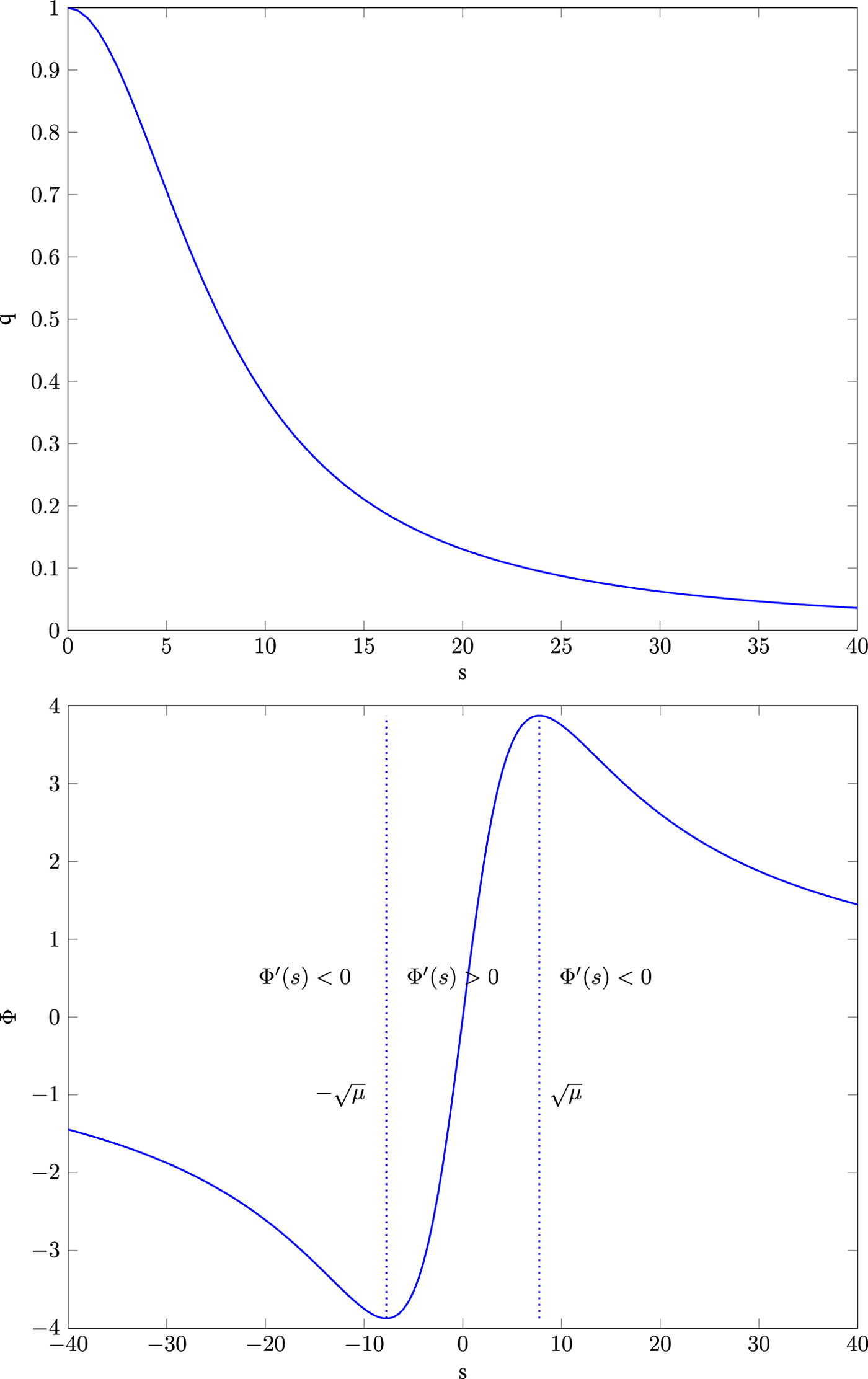
Fig. 6. Top: diffusivity function $q(s) =\frac {1}{1+ \frac {s^2}{\mu }}$ , bottom: its flux function $\Phi (s)= \frac {s}{1+ \frac {s^2}{\mu }}$
, bottom: its flux function $\Phi (s)= \frac {s}{1+ \frac {s^2}{\mu }}$ .
.
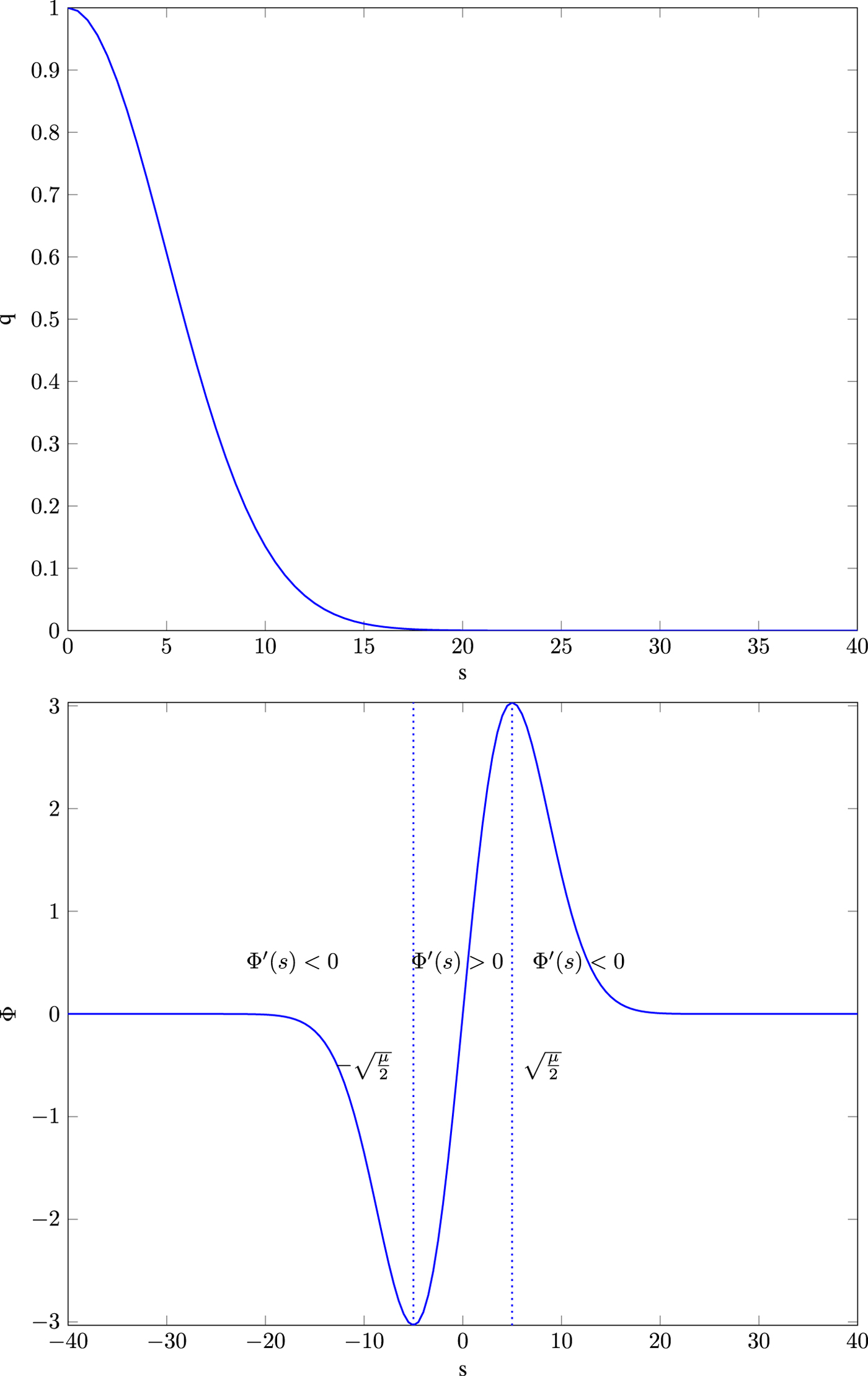
Fig. 7. Top: diffusivity function $q(s) = \mathrm {exp}(({-s^2})/{\mu })$ , bottom: its flux function $\Phi (s)= s\,\mathrm {exp}(({-s^2})/{\mu })$
, bottom: its flux function $\Phi (s)= s\,\mathrm {exp}(({-s^2})/{\mu })$ .
.
In case of $q(s) = \frac {1}{1+ \frac {s^2}{\mu }}$ , function $\Phi '(s)>0$
, function $\Phi '(s)>0$ if
if

and $\Phi '(s)<0$ otherwise. Therefore, the corresponding effect of the model at this point is what can be called “forward diffusion” if
otherwise. Therefore, the corresponding effect of the model at this point is what can be called “forward diffusion” if

for $\bar {x}\in \mathbb {R}$ and “backward diffusion” otherwise. This holds analogously in case of $q(s) =\mathrm {exp}(({-s^2})/{\mu })$
and “backward diffusion” otherwise. This holds analogously in case of $q(s) =\mathrm {exp}(({-s^2})/{\mu })$ for threshold $\sqrt {{\mu }/{2}}$
for threshold $\sqrt {{\mu }/{2}}$ .
.
As there is no straightforward choice for μ, its setting was tested empirically. The parameter test features an encoder control that includes saving the original (meaning the cost of the non-filtered best choice) and the corresponding improved costs of the diffusion filter using a certain parameter μ. The difference of the costs is expressed in percentage and referred to as “cost improvement”. Hereby, only cases were considered where the diffusion filter was chosen, i.e. the RD gain was improved. The tested parameters were chosen as $\mu \in \{64, 100, 112, 151, 227, 310, 419, 550 \}.$ This interval was chosen as a result of several empirical tests. Choosing μ smaller than 64 or larger than 550 was tested and did not show any considerable improvements. In the encoder only test, no additional costs for the parameters were simulated since for the resulting tool the parameters will not be signaled but set fixed. The performed tests were evaluated on a large test set that included the sequences for which the results are shown in the following. As μ is only one single parameter, the risk of overfitting can be neglected here. The All Intra and Random Access configurations will be considered separately and it will be distinguished between intra and inter blocks. Further, it has been tested empirically that in case of inter, it makes sense to distinguish between different QPs, $QP \in [0, 51]$
This interval was chosen as a result of several empirical tests. Choosing μ smaller than 64 or larger than 550 was tested and did not show any considerable improvements. In the encoder only test, no additional costs for the parameters were simulated since for the resulting tool the parameters will not be signaled but set fixed. The performed tests were evaluated on a large test set that included the sequences for which the results are shown in the following. As μ is only one single parameter, the risk of overfitting can be neglected here. The All Intra and Random Access configurations will be considered separately and it will be distinguished between intra and inter blocks. Further, it has been tested empirically that in case of inter, it makes sense to distinguish between different QPs, $QP \in [0, 51]$ . This difference can be explained by the different nature of inter and intra predictions. For each class of block type, the number of occurrence of a certain parameter μ was multiplied by the corresponding percentage in cost improvement. The resulting number is referred to as “improvement weight” in the following. The idea is here that the larger the weight, the larger its presumable improvement impact is on the test set.
. This difference can be explained by the different nature of inter and intra predictions. For each class of block type, the number of occurrence of a certain parameter μ was multiplied by the corresponding percentage in cost improvement. The resulting number is referred to as “improvement weight” in the following. The idea is here that the larger the weight, the larger its presumable improvement impact is on the test set.
In Table 2, the three parameters with the best (i.e. largest) improvement weights for intra blocks are depicted. It has been tested empirically that $\mu =550$ results in the highest RD gain, which was highlighted in gray in Table 2.
results in the highest RD gain, which was highlighted in gray in Table 2.
Table 2. Best μ parameter for intra blocks.

In Table 3, a comparison of setting $\mu =64$ (left-hand side) and $\mu =550$
(left-hand side) and $\mu =550$ (right-hand side) is shown for All Intra configuration, using $QP \in \{22,27,32,37\}$
(right-hand side) is shown for All Intra configuration, using $QP \in \{22,27,32,37\}$ , tested with one frame. It can be seen that the modification of parameter μ increases the RD gains of most sequences. Overall, the AI gain is increased from $-1.68 \%$
, tested with one frame. It can be seen that the modification of parameter μ increases the RD gains of most sequences. Overall, the AI gain is increased from $-1.68 \%$ to $-1.77 \%$
to $-1.77 \%$ for the luma component.
for the luma component.
Table 3. All Intra comparison of $\mu =64$ (Y, U, V left-hand side) and $\mu =550$
(Y, U, V left-hand side) and $\mu =550$ ($Y_{impr}$
($Y_{impr}$ , $U_{impr}$
, $U_{impr}$ , $V_{impr}$
, $V_{impr}$ right-hand side), 1 frame, $QP \in \{22,27,32,37\}$
right-hand side), 1 frame, $QP \in \{22,27,32,37\}$ , measured in BD rate.
, measured in BD rate.

In Table 6, the parameters μ for the best three improvement weights have been depicted separated by QP intervals for inter blocks. The best performing parameters (in terms of final bitrate savings) are highlighted in gray. In Tables 4 and 5, a comparison is shown for selected sequences setting $\mu =64$ fixed for inter and intra blocks on the left-hand side and varying μ by setting
fixed for inter and intra blocks on the left-hand side and varying μ by setting

on the right-hand side. Since inter predictions are naturally more diverse in terms of structures, it seems reasonable that they are also more sensitive toward change in quantization parameters.
Table 4. Random Access comparison of $\mu =64$ fixed for intra and inter blocks (Y, U, V left-hand side) and QP-dependent μ for inter blocks as in Eq. (11) ($Y_{impr}$
fixed for intra and inter blocks (Y, U, V left-hand side) and QP-dependent μ for inter blocks as in Eq. (11) ($Y_{impr}$ , $U_{impr}$
, $U_{impr}$ , $V_{impr}$
, $V_{impr}$ right-hand side), 17 frames, $QP \in \{22,27,32,37\}$
right-hand side), 17 frames, $QP \in \{22,27,32,37\}$ , measured in BD rate.
, measured in BD rate.

Table 5. Random Access comparison of $\mu =64$ fixed for intra and inter blocks (Y, U, V left-hand side) and QP-dependent μ for inter blocks as in Eq. (11) ($Y_{impr}$
fixed for intra and inter blocks (Y, U, V left-hand side) and QP-dependent μ for inter blocks as in Eq. (11) ($Y_{impr}$ , $U_{impr}$
, $U_{impr}$ , $V_{impr}$
, $V_{impr}$ right-hand side), 17 frames, $QP \in \{27,32,37,42\}$
right-hand side), 17 frames, $QP \in \{27,32,37,42\}$ , measured in BD rate.
, measured in BD rate.

Table 6. Best μ Parameter for inter blocks separated by QP intervals.

In Table 4, the results for $QP \in \{22,27,32,37\}$ are shown, and in Table 5, the results for $QP \in \{27,32,37,42\}$
are shown, and in Table 5, the results for $QP \in \{27,32,37,42\}$ . The depicted results were configured with 17 frames using the RA configuration. It can be seen that the RD gains are improved overall, for luma by $0.07\%$
. The depicted results were configured with 17 frames using the RA configuration. It can be seen that the RD gains are improved overall, for luma by $0.07\%$ for $QP \in \{22,27,32,37\}$
for $QP \in \{22,27,32,37\}$ and $0.3\%$
and $0.3\%$ for $QP \in \{27,32,37,42\}$
for $QP \in \{27,32,37,42\}$ . While the results in Table 4 remain more or less stable and the average improvement stems from sequence Nebuta, in Table 5 most sequences are improved. This can be explained by the definition of μ in Eq. (11) where a different parameter is chosen for larger QPs while the initial results use $\mu =64$
. While the results in Table 4 remain more or less stable and the average improvement stems from sequence Nebuta, in Table 5 most sequences are improved. This can be explained by the definition of μ in Eq. (11) where a different parameter is chosen for larger QPs while the initial results use $\mu =64$ set fixed.
set fixed.
VI. USING A NEUMANN BOUNDARY IN INTER CASE
From a hardware point of view, it can be beneficial to process intra and inter blocks in separate, parallel loops. In that case, the inter loop should not depend on reconstructed samples resulting from the intra loop. Hence, to avoid using the reconstructed boundary for the diffusion filter in the inter case, a Neumann boundary condition is used at the top and left boundary of the block (instead of fixed samples at the boundary). In a discrete setting, this means that the inner points of the prediction are mirrored at the boundary to replace the reconstructed samples. In Tables 7 and 8, the corresponding results are depicted, for 17 frames and for $QP \in \{22,27,32,37\}$ and for $QP \in \{27,32,37,42\}$
and for $QP \in \{27,32,37,42\}$ .
.
Table 7. Neumann boundary condition for inter blocks, Random Access, 17 frames, $QP \in \{22,27,32,37\}$ , measured in BD rate.
, measured in BD rate.

Table 8. Neumann boundary condition for inter blocks, Random Access, 17 frames, $QP \in \{27,32,37,42\}$ , measured in BD rate.
, measured in BD rate.

It can be observed that in comparison to the right (improved) Luma results of Tables 4 and 5, the gains decrease slightly with the inter Neumann boundary condition but remain in a similar range. Thus, this version serves as a suitable alternative in case of hardware restrictions applying.
VII. RESULTS
In Tables 9 and 10, results are shown for full sequences for AI configuration. The corresponding full sequence results for RA are shown in Table 11 for $QP \in \{22,27,32,37\}$ and in Table 12 for $QP \in \{27,32,37,42\}$
and in Table 12 for $QP \in \{27,32,37,42\}$ .
.
Table 9. All Intra, full sequences, $QP \in \{22,27,32,37\}$ , measured in BD rate.
, measured in BD rate.

Table 10. All Intra, full sequences, $QP \in \{27,32,37,42\}$ , measured in BD rate.
, measured in BD rate.

Table 11. Random Access, full sequences, $QP \in \{22,27,32,37\}$ , measured in BD rate.
, measured in BD rate.

Table 12. Random Access, full sequences, $QP \in \{27,32,37,42\}$ , measured in BD rate.
, measured in BD rate.

It can be seen in Tables 9, 10, 11, and 12 that the filter shows considerable rate-distortion gains with a reasonable complexity trade-off for AI and RA. The higher number of bitrate savings for RA can be explained by the signal adaptive nature of the tool: Since the noise in the predictor is uncorrelated to the noise of the current block, the filter is more likely to be applied. Furthermore, the tool is able to exhaust its full potential in inter predictions where the image structures are more diverse.
For AI, for test sequence Crosswalk, up to $-2.38\%$ RD gain are achieved. For RA, in test sequence Nebuta, a compression gain of $-7.36 \%$
RD gain are achieved. For RA, in test sequence Nebuta, a compression gain of $-7.36 \%$ can be observed.
can be observed.
This exceptional gain can be explained by taking a look at a close up of the sequence Nebuta in Fig. 8: It can be seen that there seems to be a kind of noise in the image and this might lead to distorted predictions. Knowing that the diffusion filter is based on mathematical denoising methods, it comes as no surprise that this tool works so well on this particular sequence.

Fig. 8. Excerpt taken from sequence Nebuta, QP32.
Overall, the gains for $QP \in \{27,32,37,42\}$ configuration are slightly less than for $QP \in \{22,27,32,37\}$
configuration are slightly less than for $QP \in \{22,27,32,37\}$ . This can be explained by the nature of the tool. As sequences with high QPs are coarser, the filter cannot remove as much noise. Additionally, since four different settings of the diffusion filter are tested and signaled, the tool is quite expensive in case of low bitrates.
. This can be explained by the nature of the tool. As sequences with high QPs are coarser, the filter cannot remove as much noise. Additionally, since four different settings of the diffusion filter are tested and signaled, the tool is quite expensive in case of low bitrates.
In Fig. 9, one can compare the rate-distortion (RD) plots for test sequence Nebuta for the five QPs 22, 27, 32, 37, and 42. Clearly, one can observe the higher RD gain in the lower QPs as the distance between the curves is larger. This corresponds to the fact that the tool generally works better for $QP \in \{22,27,32,37\}$ configuration.
configuration.
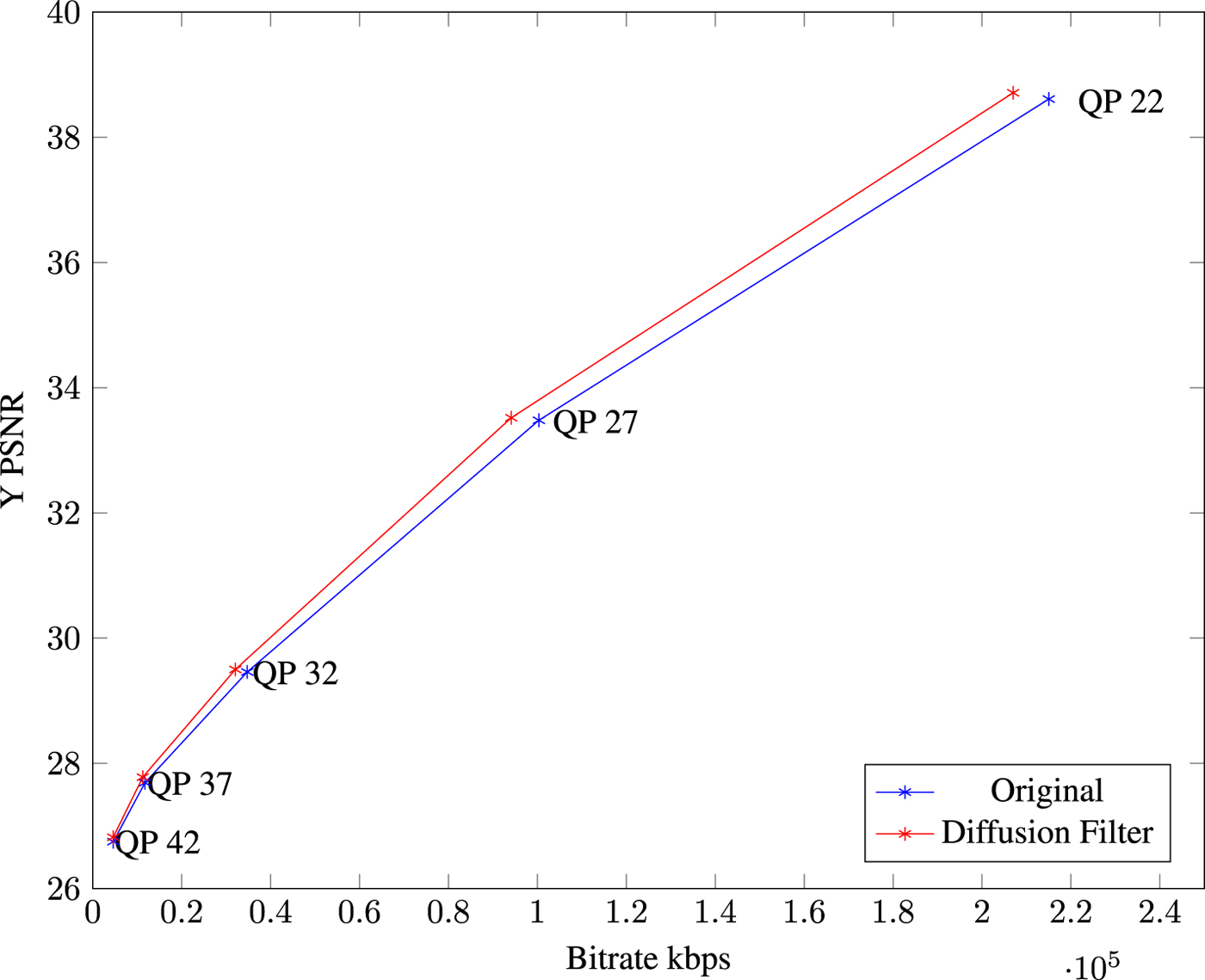
Fig. 9. RD plot for test sequence Nebuta, RA configuration.
VIII. CONCLUSION
It has been shown that mathematical methods coming from the field of image processing can be used to optimize prediction signals in video coding and significantly improve the rate-distortion performance. More specifically, prediction filters based on a continuous mathematical model have been developed for video coding. The resulting signal adaptive filters have been applied to intra as well as to inter predictions.
Based on a PDE-based class of diffusion models, two types of diffusion filters were constructed, one using a uniform diffusion with a fixed filter mask and one signal adaptive diffusion filter that incorporates the structures of the underlying prediction signal. For both filter types, two different sets of iteration steps (which corresponds to the filter strength) were used. The diffusion filter method introduced here consists of these resulting four filter configurations which are tested and signaled individually.
In case that hardware restrictions require to refrain in inter case from the usage of the reconstructed block boundary, an alternative was presented: Instead of using the reconstructed samples, a Neumann boundary condition is applied in inter case. Experimental results confirmed that the RD gains for Random Access (RA) only decrease slightly.
The filters were embedded into a software based on HEVC, a state-of-the-art video codec, and selected in a block-wise manner. Parameter tests incorporating the cost improvements were performed and it was shown that optimizing the employed parameters improved the RD gains.
Overall, the introduced diffusion filter method achieved an average bitrate saving of $1.74 \%$ for AI with $43 \%$
for AI with $43 \%$ encoding and $19 \%$
encoding and $19 \%$ decoding complexity increase and $2.27 \%$
decoding complexity increase and $2.27 \%$ for RA for $19 \%$
for RA for $19 \%$ encoding and $17 \%$
encoding and $17 \%$ decoding complexity increase. For individual UHD sequences, it was shown that the application of the diffusion filter method yields results of up to $2.38 \%$
decoding complexity increase. For individual UHD sequences, it was shown that the application of the diffusion filter method yields results of up to $2.38 \%$ for AI and $7.36 \%$
for AI and $7.36 \%$ for Random Access (RA).
for Random Access (RA).
Jennifer Rasch received her Diploma in Mathematics from the Humboldt University of Berlin, Germany in 2012. Her thesis was awarded as the best thesis in the field Numerics by the Deutsche Mathematiker Vereinigung (German Mathematical Union). Since 2014, she has beeen a research associate in the Video Coding & Analytics department at the Heinrich Hertz Institute in Berlin, Germany. She actively participated in the standardization process of the ITU-T Video Coding Experts Group since 2018. She submitted her Ph.D. thesis at the Technical University of Berlin in 2019.
Jonathan Pfaff received his Diploma and his Dr. rer. nat. degree in Mathematics from Bonn University in 2010 and 2012, respectively. After a postdoctoral research stay at Stanford University, he joined the Video Coding & Analytics Department at the Heinrich Hertz Institute in Berlin, Germany in 2015. He has contributed to the efforts of the ITU-T Video Coding Experts Group in developing the Versatile Video Coding standard since 2018.
Michael Schäfer received the M.Sc. degree in Mathematics from the Freie Universität Berlin, Germany, in 2017. During his studies in 2015, Schäfer joined the Fraunhofer Heinrich Hertz Institute, Berlin, Germany as an associate of its Image and Video Coding research group. He has contributed to the efforts of the ITU-T Video Coding Experts Group in developing the Versatile Video Coding standard since 2018.
Anastasia Henkel received the Dip.-Ing. degree in Telecommunications/Communication Techniques at the Hochschule für Technik und Wirtschaft Berlin – University of Applied Sciences in Berlin, Germany in 2010. In 2010, Anastasia Henkel joined the Fraunhofer Heinrich Hertz Institute, Berlin, Germany. Since then, she has been a research associate in the Video Coding & Analytics department. She participated in the standardization process of the ITU-T Video Coding Experts Group and was involved in the development of the High Efficiency Video Coding (HEVC) and the Versatile Video Coding (VVC) standards.
Heiko Schwarz received the Dipl.-Ing. degree in Electrical Engineering and the Dr.-Ing. degree, both from the University of Rostock, Germany, in 1996 and 2000, respectively. In 1999, Heiko Schwarz joined the Fraunhofer Heinrich Hertz Institute, Berlin, Germany. Since then, he has contributed successfully to the standardization activities of the ITU-T Video Coding Experts Group and the ISO/IEC Moving Pictures Experts Group. Since 2010, he is heading the research group “Image and Video Coding” at the Fraunhofer Heinrich Hertz Institute. In October 2017, he became a Professor at the FU Berlin.
Detlev Marpe received the Dipl.-Math. degree (Hons.) from the Technical University of Berlin, Germany, in 1990 and the Dr.-Ing. degree from the University of Rostock, Germany, in 2004. He joined the Fraunhofer Institute for Telecommunications-Heinrich Hertz Institute, Berlin, in 1999, where he is currently the Head of the Video Coding & Analytics Department and of the Image and Video Coding Research Group. He was a major Technical Contributor to the entire process of the development of the H.264/MPEG-4 Advanced Video Coding (AVC) standard and the H.265/MPEG High Efficiency Video Coding (HEVC) standard.
Thomas Wiegand received the Dipl.-Ing. degree in Electrical Engineering from the Technical University of Hamburg-Harburg, Germany, in 1995 and the Dr.-Ing. degree from the University of Erlangen-Nuremberg, Germany, in 2000. He served as a Consultant to several start-up ventures. He has been an active participant in standardization for video coding multimedia with many successful submissions to ITU-T and ISO/IEC. He is an Associated Rapporteur of ITU-T VCEG. He is currently a Professor with the Department of Electrical Engineering and Computer Science, Technical University of Berlin, Berlin, Germany, and is jointly heading the Fraunhofer Heinrich Hertz Institute, Berlin.






















 Open access
Open access