



1. Introduction
In optimized stellarators, the magnetic field lines usually trace out simply nested flux surfaces. Large magnetic islands or regions with chaotic field lines are avoided, at least in the plasma core, in the interest of good confinement. Kruskal and Kulsrud have shown that magnetostatic equilibria with this property (insofar as they exist) are uniquely determined by the shape of the toroidal boundary and by the plasma current and pressure profiles (Kruskal & Kulsrud Reference Kruskal and Kulsrud1958; Helander Reference Helander2014). The rotational transform profile can be used in place of the current profile to uniquely determine the equilibrium.
This fundamental result provides the theoretical basis for fixed-boundary magnetohydrodynamic (MHD) equilibrium calculations, which are commonly used in stellarator optimization studies. The shape of the plasma boundary is prescribed, usually as a Fourier series in poloidal and toroidal angles (Hirshman & Whitson Reference Hirshman and Whitson1983; Nührenberg & Zille Reference Nührenberg and Zille1988),
and provides input to a fixed-boundary MHD equilibrium code. Here $(R,\varphi ,Z)$ denote cylindrical coordinates and $\theta$
denote cylindrical coordinates and $\theta$ is a ‘poloidal’ angle parameter, whose choice is the topic of this paper. For simplicity, we restrict our attention to fields with stellarator symmetry,
is a ‘poloidal’ angle parameter, whose choice is the topic of this paper. For simplicity, we restrict our attention to fields with stellarator symmetry,
Relinquishing this symmetry is not difficult, but the number of coefficients then needs to be doubled because one has to include the coefficients of the opposite parity.
In stellarator optimization, the Fourier coefficients $R_{m,n}$ and $Z_{m,n}$
and $Z_{m,n}$ are varied until an optimal magnetic equilibrium has been found, where the optimum is defined by the minimum of some optimization target function. The optimization thus amounts to a search in a space of $2(M+1)(2N+1)$
are varied until an optimal magnetic equilibrium has been found, where the optimum is defined by the minimum of some optimization target function. The optimization thus amounts to a search in a space of $2(M+1)(2N+1)$ dimensions.Footnote 1 However, as has sometimes been remarked (Lee et al. Reference Lee, Harris, Hirshman and Neilson1988; Hirshman & Breslau Reference Hirshman and Breslau1998), this representation is not unique but contains ‘tangential degrees of freedom’ in the limit $M \rightarrow \infty$
dimensions.Footnote 1 However, as has sometimes been remarked (Lee et al. Reference Lee, Harris, Hirshman and Neilson1988; Hirshman & Breslau Reference Hirshman and Breslau1998), this representation is not unique but contains ‘tangential degrees of freedom’ in the limit $M \rightarrow \infty$ , $N \rightarrow \infty$
, $N \rightarrow \infty$ . If a large but finite number of terms are included in the Fourier series, several very different choices of the coefficients $\{R_{mn}, Z_{mn} \}$
. If a large but finite number of terms are included in the Fourier series, several very different choices of the coefficients $\{R_{mn}, Z_{mn} \}$ correspond to approximately the same surface shape. Unless this problem is addressed, the search is therefore performed in a space of unnecessarily large dimensionality. Hirshman and co-workers devised a method called ‘spectral condensation’ to deal with this problem, which is used internally in the VMEC and SPEC equilibrium codes to minimize the number of coefficients in the Fourier representation of all magnetic surfaces, including interior ones (Hirshman & Whitson Reference Hirshman and Whitson1983; Hirshman & Van Rij Reference Hirshman and Van Rij1986; Hudson et al. Reference Hudson, Dewar, Dennis, Hole, McGann, von Nessi and Lazerson2012). However, spectral condensation is rarely used for the plasma boundary in optimization studies. The present article suggests another method for dealing with the problem of non-uniqueness of the boundary representation. This method is simpler but mathematically less sophisticated than spectral condensation. Unlike the latter, it does not correspond to a representation that is optimally economical, but it is simpler to implement numerically, requires less computation and appears to work quite well in practice.
correspond to approximately the same surface shape. Unless this problem is addressed, the search is therefore performed in a space of unnecessarily large dimensionality. Hirshman and co-workers devised a method called ‘spectral condensation’ to deal with this problem, which is used internally in the VMEC and SPEC equilibrium codes to minimize the number of coefficients in the Fourier representation of all magnetic surfaces, including interior ones (Hirshman & Whitson Reference Hirshman and Whitson1983; Hirshman & Van Rij Reference Hirshman and Van Rij1986; Hudson et al. Reference Hudson, Dewar, Dennis, Hole, McGann, von Nessi and Lazerson2012). However, spectral condensation is rarely used for the plasma boundary in optimization studies. The present article suggests another method for dealing with the problem of non-uniqueness of the boundary representation. This method is simpler but mathematically less sophisticated than spectral condensation. Unlike the latter, it does not correspond to a representation that is optimally economical, but it is simpler to implement numerically, requires less computation and appears to work quite well in practice.
The remainder of the present paper first describes the non-uniqueness of the representation (1.1) and how it can be eliminated, followed by examples showing how this technique simplifies the problem of optimization by eliminating a plethora of spurious and approximate minima of the target function in configuration space.
2. Non-uniqueness of the usual representation
In the representation (1.1), the variable $\varphi$ denotes the toroidal geometric angle, but the choice of poloidal angle $\theta$
denotes the toroidal geometric angle, but the choice of poloidal angle $\theta$ is arbitrary. Indeed, if we define
is arbitrary. Indeed, if we define
where $\epsilon$ is any continuous, doubly $2{\rm \pi}$
is any continuous, doubly $2{\rm \pi}$ -periodic function,Footnote 2 then the surfaces
-periodic function,Footnote 2 then the surfaces

and

coincide. Moreover, if $|\partial \epsilon (\theta ,\varphi ) / \partial \theta | < 1$ for all $\theta$
for all $\theta$ and $\varphi$
and $\varphi$ , then both surface parametrizations are bijective if one of them has this property.
, then both surface parametrizations are bijective if one of them has this property.
The fact that the addition of the function $\epsilon (\theta ,\varphi )$ to the poloidal angle $\theta$
to the poloidal angle $\theta$ does not change $S$
does not change $S$ indicates great freedom in the parametrization of the surface. If $M=N=\infty$
indicates great freedom in the parametrization of the surface. If $M=N=\infty$ in the sum (1.1), then infinitely many choices of coefficients $\{R_{mn}, Z_{mn}\}$
in the sum (1.1), then infinitely many choices of coefficients $\{R_{mn}, Z_{mn}\}$ generate the same surface. Note that very different sets of coefficients can describe the same surface. However, if $M$
generate the same surface. Note that very different sets of coefficients can describe the same surface. However, if $M$ and $N$
and $N$ are finite in (1.1), so that the Fourier series of the functions $R(\theta ,\varphi )$
are finite in (1.1), so that the Fourier series of the functions $R(\theta ,\varphi )$ and $Z(\theta ,\varphi )$
and $Z(\theta ,\varphi )$ terminate after a finite number of terms, then the corresponding series for $\tilde {R}(\theta ,\varphi )$
terminate after a finite number of terms, then the corresponding series for $\tilde {R}(\theta ,\varphi )$ and $\tilde {Z}(\theta ,\varphi )$
and $\tilde {Z}(\theta ,\varphi )$ will, in general, not terminate.
will, in general, not terminate.
This observation has implications for the nature of the representation (1.1) when $M$ and $N$
and $N$ are fixed, finite numbers:
are fixed, finite numbers:
(i) If $M$
 and $N$ are not too large, so that only a few terms are kept in the series (1.1), then the surface it represents will usually correspond to a unique set of coefficients $\{R_{m,n}, Z_{m,n}\}$ or a small number of such sets. Of course, with only a few harmonics, not every surface can be represented by the series (1.1).
and $N$ are not too large, so that only a few terms are kept in the series (1.1), then the surface it represents will usually correspond to a unique set of coefficients $\{R_{m,n}, Z_{m,n}\}$ or a small number of such sets. Of course, with only a few harmonics, not every surface can be represented by the series (1.1).(ii) However, if many terms are included in the sum, $M \sim N \gg 1$
, so that almost any stellarator-symmetric surface can be described by the series (1.1), then many widely different choices of coefficients $\{R_{m,n}, Z_{m,n}\}$ can correspond to almost the same surface. The more harmonics allowed in the sum will result in the representation becoming less unique.



These observations are confirmed by practical experience. At the beginning of a stellarator optimization run, it is usually futile to include many Fourier harmonics in the representation of the plasma boundary; the optimization then ‘gets stuck’ and does not proceed far from the initial state. Instead, it often proves useful to begin with only a few harmonics and gradually add more terms as the optimization proceeds, to allow for greater freedom in the shape of the plasma.
3. Spectral condensation
Spectral condensation exploits the non-uniqueness of the poloidal angle by minimizing the ‘spectral width’, which measures the spectral extent of $R_{mn}$ and $Z_{mn}$
and $Z_{mn}$ , under the constraint of not changing the geometry of the surface $S$
, under the constraint of not changing the geometry of the surface $S$ . The spectral width is defined by Hirshman & Meier (Reference Hirshman and Meier1985) and Hirshman & Breslau (Reference Hirshman and Breslau1998) as
. The spectral width is defined by Hirshman & Meier (Reference Hirshman and Meier1985) and Hirshman & Breslau (Reference Hirshman and Breslau1998) as
where $p \geqslant 0$ and $q >0$
and $q >0$ are constants.Footnote 3 To first order in the perturbation $\epsilon$
are constants.Footnote 3 To first order in the perturbation $\epsilon$ introduced in the previous section, $\tilde {R}(\theta ,\varphi ) = R(\theta ,\varphi ) + \delta R(\theta ,\varphi )$
introduced in the previous section, $\tilde {R}(\theta ,\varphi ) = R(\theta ,\varphi ) + \delta R(\theta ,\varphi )$ , $\tilde {Z}(\theta ,\varphi ) = Z(\theta ,\varphi ) + \delta Z(\theta ,\varphi )$
, $\tilde {Z}(\theta ,\varphi ) = Z(\theta ,\varphi ) + \delta Z(\theta ,\varphi )$ , and the Fourier coefficients of $\delta R$
, and the Fourier coefficients of $\delta R$ and $\delta Z$
and $\delta Z$ are given by
are given by
where subscripts indicate partial derivatives, $R_\theta = \partial R/\partial \theta$ . The first-order variation in the spectral width thus becomes
. The first-order variation in the spectral width thus becomes
where
Note that the $m=0$ terms do not contribute to the Fourier sums and that the spectral width assumes its minimum when $I(\theta ,\varphi ) = 0$
terms do not contribute to the Fourier sums and that the spectral width assumes its minimum when $I(\theta ,\varphi ) = 0$ . This constraint is imposed to the requisite accuracy by Fourier expanding $I(\theta ,\varphi )$
. This constraint is imposed to the requisite accuracy by Fourier expanding $I(\theta ,\varphi )$ and requiring a number $m^{\ast }$
and requiring a number $m^{\ast }$ of the Fourier coefficients $I_{mn}$
of the Fourier coefficients $I_{mn}$ to vanish, thus effectively removing $m^{\ast }$
to vanish, thus effectively removing $m^{\ast }$ degrees of freedom from the representation (Hirshman & Meier Reference Hirshman and Meier1985).
degrees of freedom from the representation (Hirshman & Meier Reference Hirshman and Meier1985).
4. An explicit boundary representation
The method of spectral condensation is optimal in the sense that it minimizes the spectral width of the representation, but it adds conceptual and computational complexity. The number of coefficients in the representation (1.1) remains high, although the constraints $I_{mn} = 0$ effectively restrict the search to a submanifold of lower dimensionality, and the system of equations corresponding to these constraints must, in general, be solved numerically. In this and the next section (§ 5), we explore a simpler and more explicit construction as a possible alternative.
effectively restrict the search to a submanifold of lower dimensionality, and the system of equations corresponding to these constraints must, in general, be solved numerically. In this and the next section (§ 5), we explore a simpler and more explicit construction as a possible alternative.
There are, of course, infinitely many ways of making the choice of poloidal angle unique, some of which have been proposed before, see e.g. Hirshman & Weitzner (Reference Hirshman and Weitzner1985), Hirshman & Breslau (Reference Hirshman and Breslau1998) and Carlton-Jones, Paul & Dorland (Reference Carlton-Jones, Paul and Dorland2021). A particularly simple choice could be to express the vertical coordinate as

If the functions $a$ and $b$
and $b$ are Fourier decomposed,
are Fourier decomposed,
one finds that this representation is of the same form as (1.1) but with only two poloidal harmonics,

which are equal to

In each poloidal cross-section of the plasma surface, the poloidal angle $\theta$ thus defined is the polar angle of the horizontal projection on a circle with a diameter equal to the vertical extent of the surface, see figure 1. This choice of representation, which removes the superfluous degrees of freedom, can produce all surface shapes without multiple minima and maxima in the vertical coordinate $Z$
thus defined is the polar angle of the horizontal projection on a circle with a diameter equal to the vertical extent of the surface, see figure 1. This choice of representation, which removes the superfluous degrees of freedom, can produce all surface shapes without multiple minima and maxima in the vertical coordinate $Z$ in each poloidal cross-section. The vast majority of all stellarators considered to date possess this property.
in each poloidal cross-section. The vast majority of all stellarators considered to date possess this property.
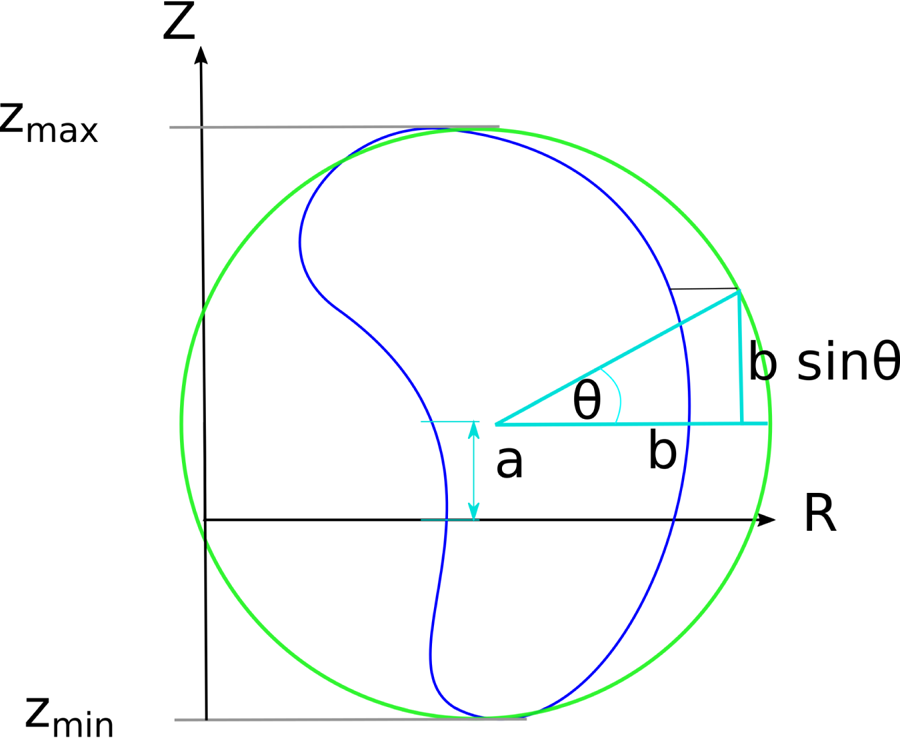
Figure 1. Circle (green) with radius $b=(z_{\max }-z_{\min })/2$ , twice the total extent in the $Z$
, twice the total extent in the $Z$ -direction of the plasma boundary (blue). The poloidal angle is chosen to be equal to the polar angle of the horizontal projection of each boundary point on this circle.
-direction of the plasma boundary (blue). The poloidal angle is chosen to be equal to the polar angle of the horizontal projection of each boundary point on this circle.
However, (4.3) suffers from another and more serious shortcoming: it cannot economically represent a classical stellarator. Such devices have an elliptical poloidal cross-section that rotates co- or counter-clockwise with increasing toroidal angle $\varphi$ . This can be seen by introducing a rotating coordinate system,
. This can be seen by introducing a rotating coordinate system,
where $\alpha$ is a constant determining the rate of rotation. For a classical stellarator, it is equal to half the number of toroidal periods $N_p$
is a constant determining the rate of rotation. For a classical stellarator, it is equal to half the number of toroidal periods $N_p$ of the device, $\alpha = N_p/2$
of the device, $\alpha = N_p/2$ , so that the cross-section rotates by 180 degrees in one period. In these coordinates, a surface with rotating elliptical boundary is represented by
, so that the cross-section rotates by 180 degrees in one period. In these coordinates, a surface with rotating elliptical boundary is represented by
where $A$ and $B$
and $B$ denote the semi-axes. In our original coordinates, we obtain
denote the semi-axes. In our original coordinates, we obtain

Hence, it is clear that $Z_{1,-1} \ne Z_{1,1}$ in contradiction to (4.4a,b), which can only mean that the poloidal coordinate $\theta$
in contradiction to (4.4a,b), which can only mean that the poloidal coordinate $\theta$ used in (4.3) cannot coincide with the corresponding one in (4.7). Although the former representation can describe any stellarator-symmetric surface, it needs many harmonics $R_{m,n}$
used in (4.3) cannot coincide with the corresponding one in (4.7). Although the former representation can describe any stellarator-symmetric surface, it needs many harmonics $R_{m,n}$ for a surface with rotating elliptical cross-section. Close to the magnetic axis, most stellarators have this property, making this shortcoming serious indeed.
for a surface with rotating elliptical cross-section. Close to the magnetic axis, most stellarators have this property, making this shortcoming serious indeed.
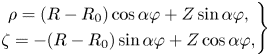
Fortunately, it is easily overcome by applying a representation similar to (4.1) in the rotating coordinate system. This leads to the prescription

with
which is our final recipe for unambiguously and economically representing a stellarator-symmetric toroidal surface, see figure 2. In terms of our original representation (1.1), the coefficients become for $m\neq 0$


Specifically, if $\alpha =1/2$ , we have
, we have


In our experience, and as we shall see in § 5, this simple prescription works very well in practice.
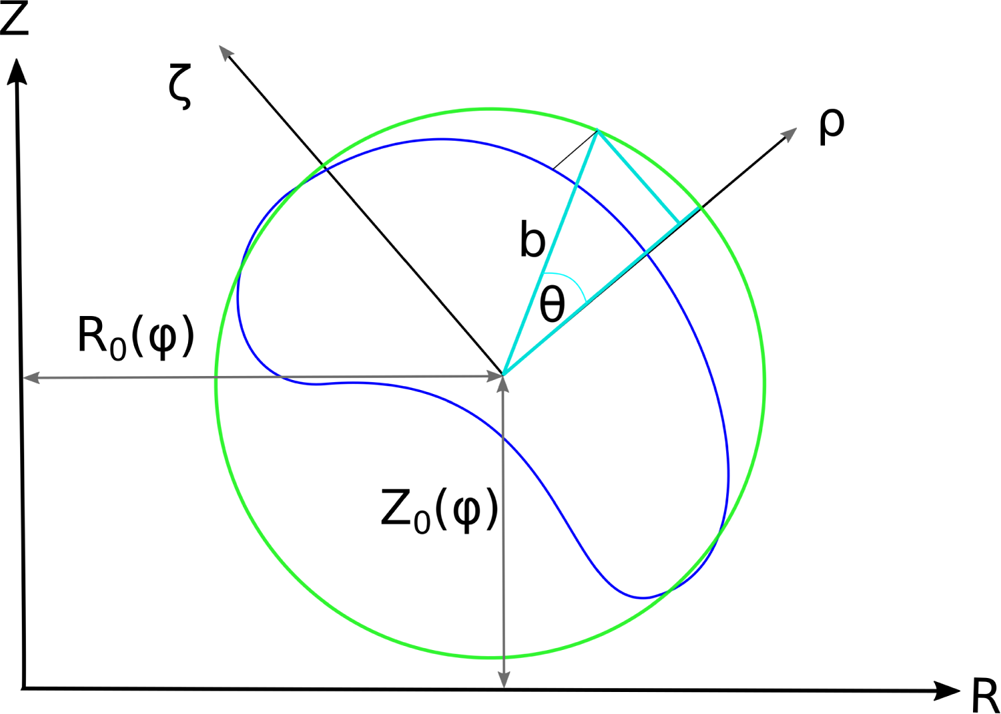
Figure 2. Circle (green) with radius $b=(\zeta _{\max }-\zeta _{\min })/2$ and the boundary (blue). The poloidal angle $\theta$
and the boundary (blue). The poloidal angle $\theta$ is the polar angle of the projection in the $\rho$
is the polar angle of the projection in the $\rho$ -direction onto the circle.
-direction onto the circle.
5. Numerical examples
In this section, we explore a few examples of increasing complexity and realism, comparing our recipe with the conventional approach.
5.1. Simple axisymmetric (two-dimensional (2-D)) case
Our first aim is to gain insight into the optimization space using the original arbitrary-angle representation (1.1). Because only the poloidal angle $\theta$ is arbitrary, this issue can be explored in a simpler, two-dimensional setting. We choose to target an axisymmetric torus with a unit circle as the poloidal cross-section. A simple penalty function $Q$
is arbitrary, this issue can be explored in a simpler, two-dimensional setting. We choose to target an axisymmetric torus with a unit circle as the poloidal cross-section. A simple penalty function $Q$ that is minimized by this surface is
that is minimized by this surface is

where

Here the surface area is $A:= \oint \mathrm {d} s$ , and the major radius is arbitrarily chosen to be $R_0=1.5$
, and the major radius is arbitrarily chosen to be $R_0=1.5$ . We restrict $R$
. We restrict $R$ and $Z$
and $Z$ to be axisymmetric: $R_{mn}=Z_{mn}=0$
to be axisymmetric: $R_{mn}=Z_{mn}=0$ for all $n\neq 0$
for all $n\neq 0$ and write
and write

and
If $Q$ is not normalized to the area $A$
is not normalized to the area $A$ , an artificial minimum exists when the area becomes small. With the normalization, the penalty function $Q$
, an artificial minimum exists when the area becomes small. With the normalization, the penalty function $Q$ approaches unity in the limit of vanishing $R-R_0$
approaches unity in the limit of vanishing $R-R_0$ and $Z$
and $Z$ (and thus vanishing surface area). The penalty function attains its sole minimum ($Q=0$
(and thus vanishing surface area). The penalty function attains its sole minimum ($Q=0$ ) if $(R-R_0)^{2} + Z^{2} = 1$
) if $(R-R_0)^{2} + Z^{2} = 1$ . This equation is satisfied by many different choices of $R_{m}$
. This equation is satisfied by many different choices of $R_{m}$ and $Z_{m}$
and $Z_{m}$ .Footnote 4
.Footnote 4
If all but the $m=1$ Fourier coefficients vanish, i.e. if $Q=Q(R_1,Z_1,R_i=0,Z_i=0)$
Fourier coefficients vanish, i.e. if $Q=Q(R_1,Z_1,R_i=0,Z_i=0)$ for $i>0$
for $i>0$ , the penalty function attains the global minimum for $R_1=Z_1=1$
, the penalty function attains the global minimum for $R_1=Z_1=1$ , see figure 3, and this is, in general, the case when only one pair of coefficients $(R_m,Z_m)$
, see figure 3, and this is, in general, the case when only one pair of coefficients $(R_m,Z_m)$ is allowed to be non-zero, see figure 4.
is allowed to be non-zero, see figure 4.
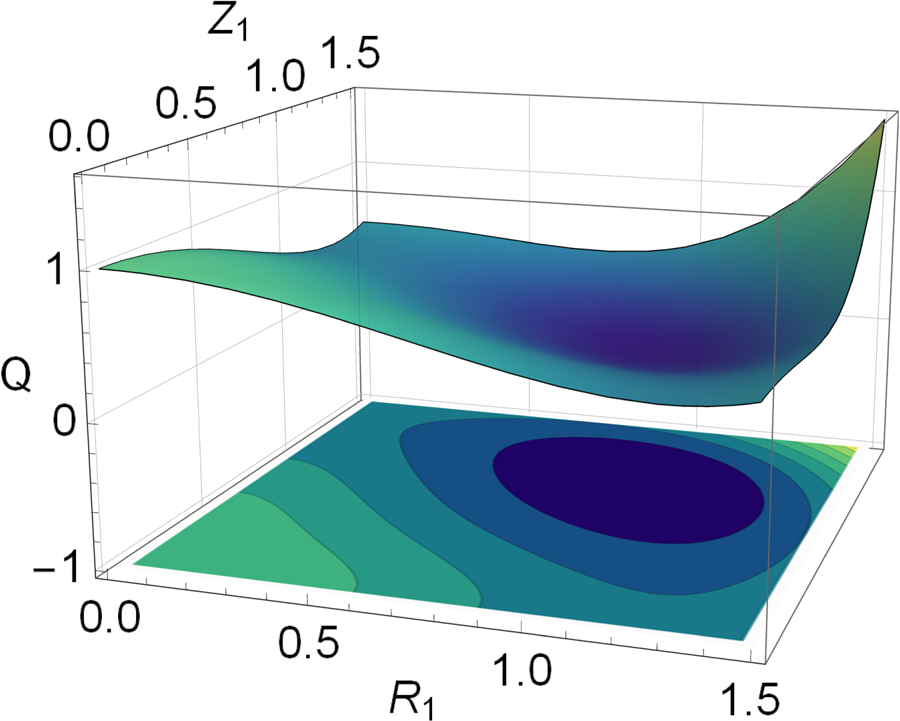
Figure 3. The cost function $Q(R_1,Z_1)$ with respect to $R_1$
with respect to $R_1$ and $Z_1$
and $Z_1$ with all other Fourier harmonics equal to zero $R_i=Z_i=0$
with all other Fourier harmonics equal to zero $R_i=Z_i=0$ , $i>1$
, $i>1$ .
.
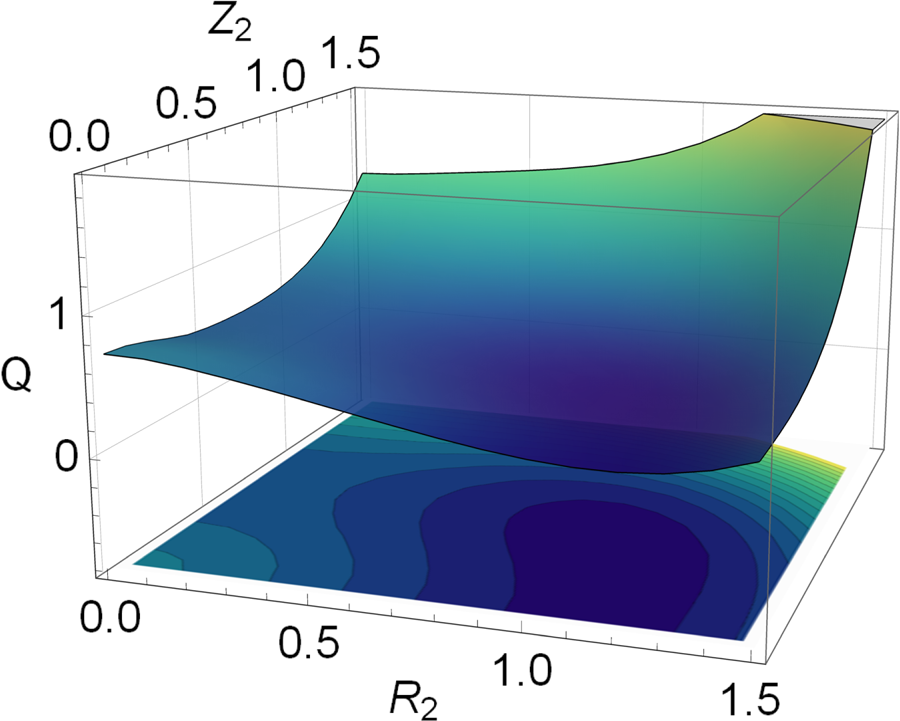
Figure 4. The cost function $Q(R_1=0.0,R_2,Z_1=0.7,Z_2)$ with respect to $R_2$
with respect to $R_2$ and $Z_2$
and $Z_2$ .
.
More interesting and complex behaviour is observed if Fourier harmonics with several values of $m$ are admitted, but one then faces the problem of graphically displaying the function $Q$
are admitted, but one then faces the problem of graphically displaying the function $Q$ of more than two variables. For instance, it is not easy to visualize how the cost function $Q(R_1,R_2,Z_1,Z_2)$
of more than two variables. For instance, it is not easy to visualize how the cost function $Q(R_1,R_2,Z_1,Z_2)$ depends on all four arguments. However, some insight can be gained by plotting the minimum of $Q$
depends on all four arguments. However, some insight can be gained by plotting the minimum of $Q$ with respect to two of the arguments as a function of the two other ones, e.g. by considering the function
with respect to two of the arguments as a function of the two other ones, e.g. by considering the function

Considering four Fourier harmonics in this way reveals the existence of three local minima, see figure 5. Two of these correspond to the global minimum, $R_1=Z_1=1, R_2= Z_2=0$ and $R_1= Z_1=0, R_2=Z_2=1$
and $R_1= Z_1=0, R_2=Z_2=1$ , and both correspond to the target surface, an axisymmetric torus with a unit circle cross-section, parametrized in two different ways. The third minimum is located at $R_1=0.0, R_2\approx 1.05, Z_1=1.15$
, and both correspond to the target surface, an axisymmetric torus with a unit circle cross-section, parametrized in two different ways. The third minimum is located at $R_1=0.0, R_2\approx 1.05, Z_1=1.15$ and $Z_2=0.0$
and $Z_2=0.0$ with $Q\approx 0.133$
with $Q\approx 0.133$ . It corresponds to a surface with zero volume but finite area, see figure 6.
. It corresponds to a surface with zero volume but finite area, see figure 6.
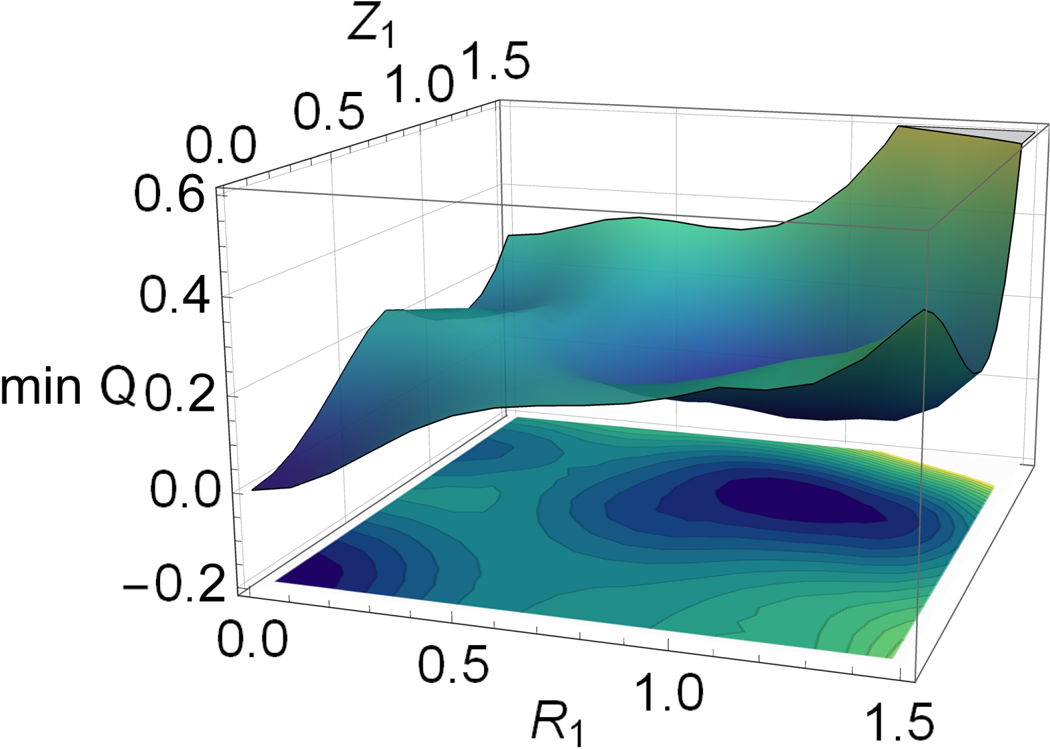
Figure 5. The minimized cost function $\min _{R_2,Z_2}Q(R_1,R_2,Z_1,Z_2)$ with respect to $R_1$
with respect to $R_1$ and $Z_1$
and $Z_1$ .
.
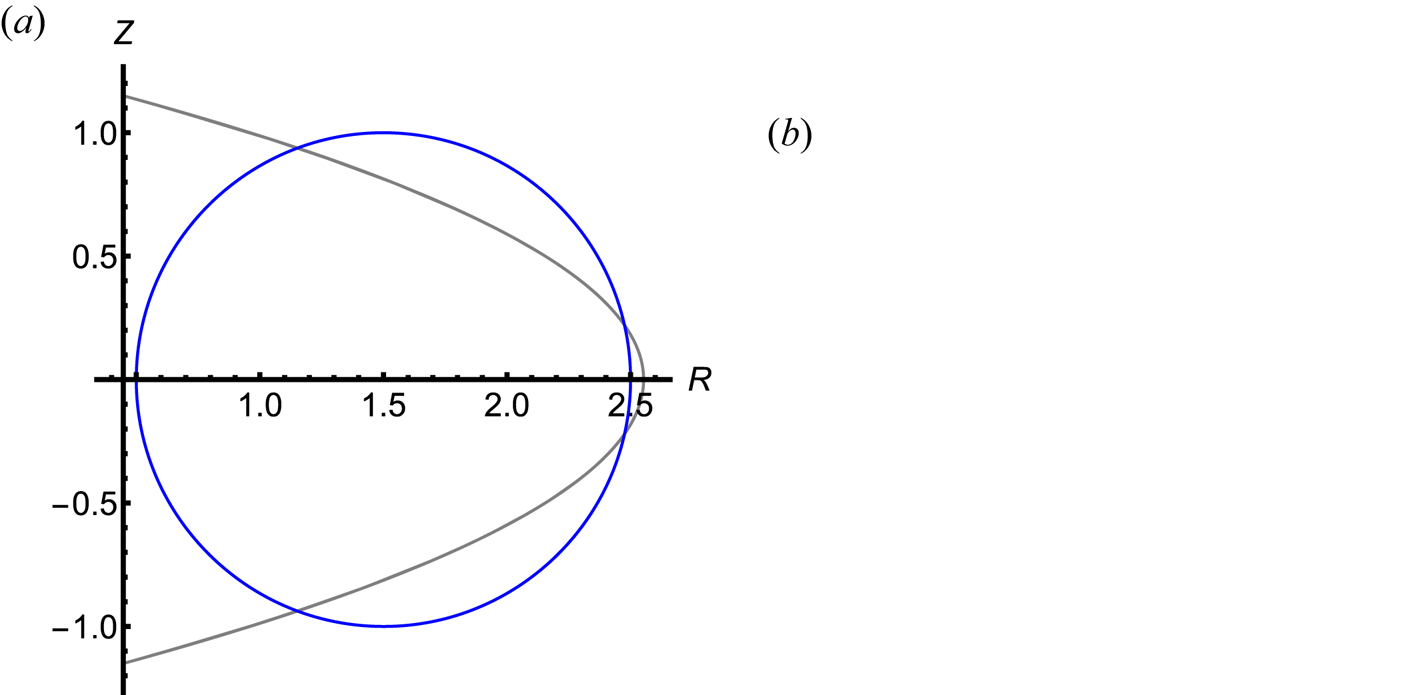
Figure 6. The three minima of $Q(R_1,R_2,Z_1,Z_2)$ . Global minima (blue): axisymmetric torus with unit circle cross-section described by $R_1= Z_1=1, R_2= Z_2=0$
. Global minima (blue): axisymmetric torus with unit circle cross-section described by $R_1= Z_1=1, R_2= Z_2=0$ and $R_1=Z_1=0, R_2=Z_2=1$
and $R_1=Z_1=0, R_2=Z_2=1$ ($R_i=0$
($R_i=0$ for all $i>2$
for all $i>2$ ). Local minimum (grey): $R_1=0.0, R_2\approx 1.05, Z_1=1.15$
). Local minimum (grey): $R_1=0.0, R_2\approx 1.05, Z_1=1.15$ and $Z_2=0.0$
and $Z_2=0.0$ : (a) the poloidal cross-section; (b) three-dimensional (3-D) view.
: (a) the poloidal cross-section; (b) three-dimensional (3-D) view.
Increasing the number of poloidal harmonics $m$ to three makes it more difficult to locate the local minima of the cost function. Without a global optimizer, one encounters many local minima depending on the initial values chosen for the remaining Fourier coefficients. Using differential evolution, a global optimization routine, to obtain $\min _{R_2,Z_2,R_3,Z_3}Q(R_1,R_2,R_3,Z_1,Z_2,Z_3)$
to three makes it more difficult to locate the local minima of the cost function. Without a global optimizer, one encounters many local minima depending on the initial values chosen for the remaining Fourier coefficients. Using differential evolution, a global optimization routine, to obtain $\min _{R_2,Z_2,R_3,Z_3}Q(R_1,R_2,R_3,Z_1,Z_2,Z_3)$ , one finds a landscape broadly similar to that found for the four-Fourier-coefficient case, see figure 7. In the neighbourhood of a local minimum, the global optimizer roughly finds similar values for $(R_2,Z_2,R_3,Z_3)$
, one finds a landscape broadly similar to that found for the four-Fourier-coefficient case, see figure 7. In the neighbourhood of a local minimum, the global optimizer roughly finds similar values for $(R_2,Z_2,R_3,Z_3)$ . In between the minima, depicted in figure 7, there is a transition region, where the global optimizer has to decide between two (or even more) competing local minima which can be challenging. When it jumps to a different local minimum, the landscape is typically not smooth. This type of scan has to be considered with caution. Most global optimization routines do not, in practice, guarantee a global minimum but sometimes end up in local ones. In local optimization routines, this problem is of course still more acute, because the outcome generally depends on the initialization.
. In between the minima, depicted in figure 7, there is a transition region, where the global optimizer has to decide between two (or even more) competing local minima which can be challenging. When it jumps to a different local minimum, the landscape is typically not smooth. This type of scan has to be considered with caution. Most global optimization routines do not, in practice, guarantee a global minimum but sometimes end up in local ones. In local optimization routines, this problem is of course still more acute, because the outcome generally depends on the initialization.
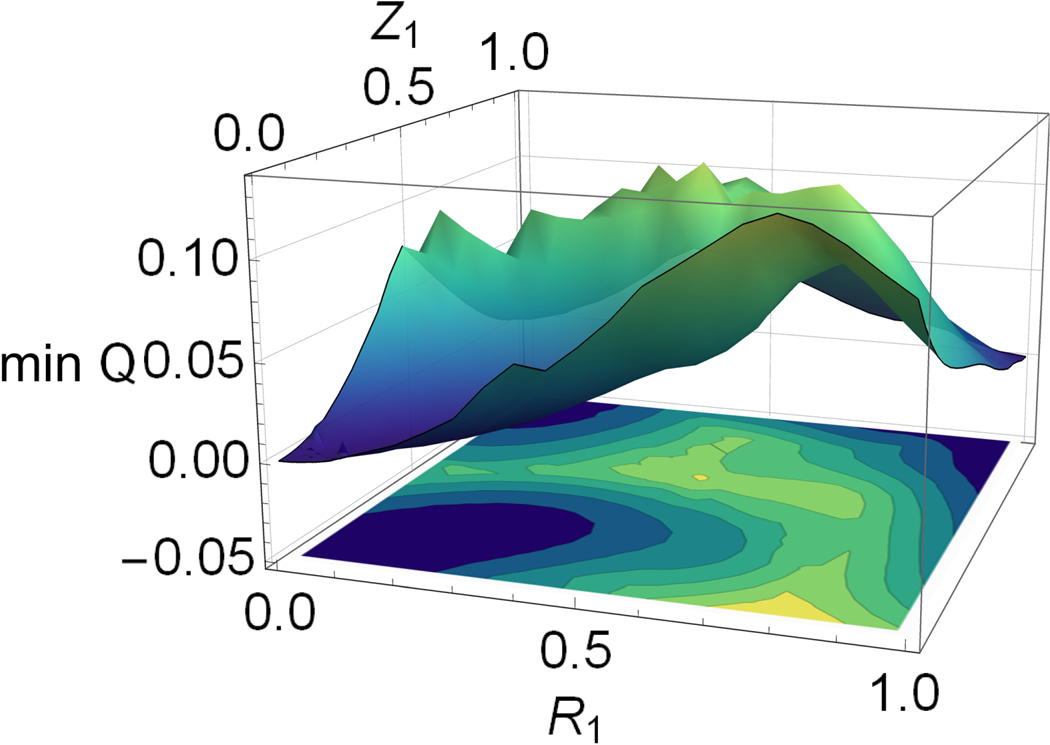
Figure 7. The minimized cost function $\min _{R_2,Z_2,R_3,Z_3}Q(R_1,R_2,R_3,Z_1,Z_2,Z_3)$ with respect to $R_1$
with respect to $R_1$ and $Z_1$
and $Z_1$ . Differential Evolution, a global optimization routine, is used to find the minima.
. Differential Evolution, a global optimization routine, is used to find the minima.
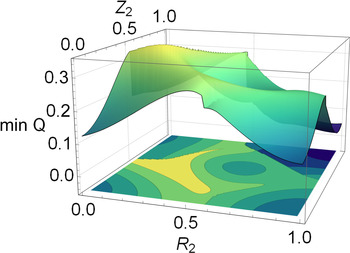
To visualize the difficulty of finding global minima, it is useful to fix two coefficients in the following $R_1({=}0.18)$ and $Z_1({=}0.4)$
and $Z_1({=}0.4)$ , and study how the landscape depends on the remaining ones. We note that the function $\min _{R_3,Z_3} Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$
, and study how the landscape depends on the remaining ones. We note that the function $\min _{R_3,Z_3} Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$ possesses five local minima with $R_2$
possesses five local minima with $R_2$ and $Z_2$
and $Z_2$ in the range 0.0–1.0, see figure 8, and line discontinuity, as can be seen in figure 8. To understand the discontinuity of $\min _{R_3,Z_3}Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$
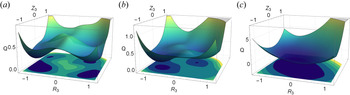
in the range 0.0–1.0, see figure 8, and line discontinuity, as can be seen in figure 8. To understand the discontinuity of $\min _{R_3,Z_3}Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$ , we plot the function $Q(R_1=0.18,R_2=x,R_3,Z_1=0.4,Z_2=y,Z_3)$
, we plot the function $Q(R_1=0.18,R_2=x,R_3,Z_1=0.4,Z_2=y,Z_3)$ with respect to $R_3$
with respect to $R_3$ and $Z_3$
and $Z_3$ for selected values for $x$
for selected values for $x$ and $y$
and $y$ , figure 9. The number of local minima varies with $x$
, figure 9. The number of local minima varies with $x$ and $y$
and $y$ . For $(x,y)=(0.24,0.39)$
. For $(x,y)=(0.24,0.39)$ , there are four local minima in the figure; for $(x,y)=(0.5,0.5)$
, there are four local minima in the figure; for $(x,y)=(0.5,0.5)$ , there are two of them; and for $(x,y)=(1,1)$
, there are two of them; and for $(x,y)=(1,1)$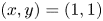 , there is only one minimum. It is thus clear that a local optimizer that seeks local minima of the function $Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$
, there is only one minimum. It is thus clear that a local optimizer that seeks local minima of the function $Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$ will find different ones depending on the starting point for $R_2,R_3,Z_2$
will find different ones depending on the starting point for $R_2,R_3,Z_2$ and $Z_3$
and $Z_3$ . Abrupt changes (discontinuity) in $\min _{R_3,Z_3}Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$
. Abrupt changes (discontinuity) in $\min _{R_3,Z_3}Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$ appear when a local minimum disappears and the optimizer finds a different one.
appear when a local minimum disappears and the optimizer finds a different one.
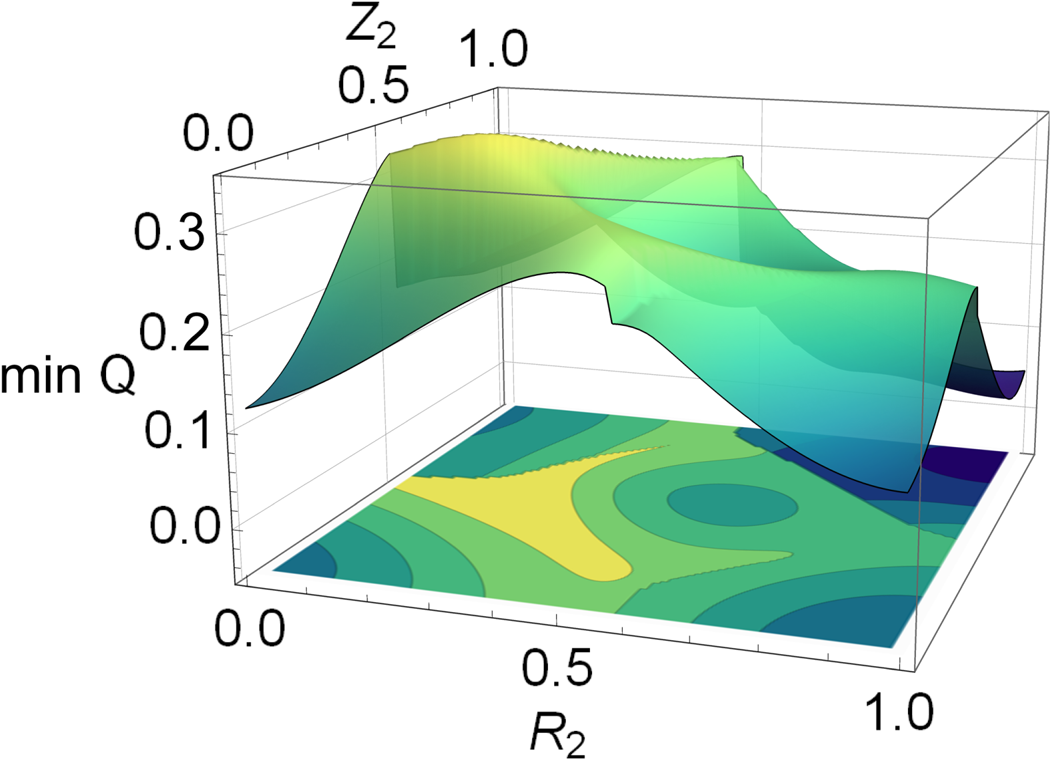
Figure 8. The locally minimized cost function $\min _{R_3,Z_3}Q(R_1=0.18,R_2,R_3,Z_1=0.4,Z_2,Z_3)$ as a function of $R_2$
as a function of $R_2$ and $Z_2$
and $Z_2$ .
.
Figure 9. The cost function $Q(R_1=0.18,R_2=x,R_3,Z_1=0.4,Z_2=y,Z_3)$ with respect to $R_3$
with respect to $R_3$ and $Z_3$
and $Z_3$ : (a) $x=0.24$
: (a) $x=0.24$ and $y=0.39$
and $y=0.39$ ; (b) $x=0.5$
; (b) $x=0.5$ and $y=0.5$
and $y=0.5$ ; (c) $x=1.0$
; (c) $x=1.0$ and $y=1.0$
and $y=1.0$ .
.
The representation proposed in § 4 leads to much more benign results when applied to the model problem (5.1). Restricting the optimization space to axisymmetric designs leads to
This time, we find that the landscape of the minimum penalty function $\min Q$ does not change much when the number of Fourier harmonics of $R$
does not change much when the number of Fourier harmonics of $R$ is increased. In the case of four Fourier harmonics, $Q(R_1,R_2,R_3,Z_1)$
is increased. In the case of four Fourier harmonics, $Q(R_1,R_2,R_3,Z_1)$ , there is one global minimum at $R_1=1,R_2=0,R_3=0,Z_1=1$
, there is one global minimum at $R_1=1,R_2=0,R_3=0,Z_1=1$ and a second shallow local minimum near $R_1=0$
and a second shallow local minimum near $R_1=0$ and $Z_1=1.0$
and $Z_1=1.0$ , see figure 10. This local minimum disappears when more Fourier harmonics are added. Importantly, the outcome is similar whether a local and global optimization algorithm is employed, see figures 11(a) and 11(b), respectively, making it much easier to find the minima numerically.
, see figure 10. This local minimum disappears when more Fourier harmonics are added. Importantly, the outcome is similar whether a local and global optimization algorithm is employed, see figures 11(a) and 11(b), respectively, making it much easier to find the minima numerically.
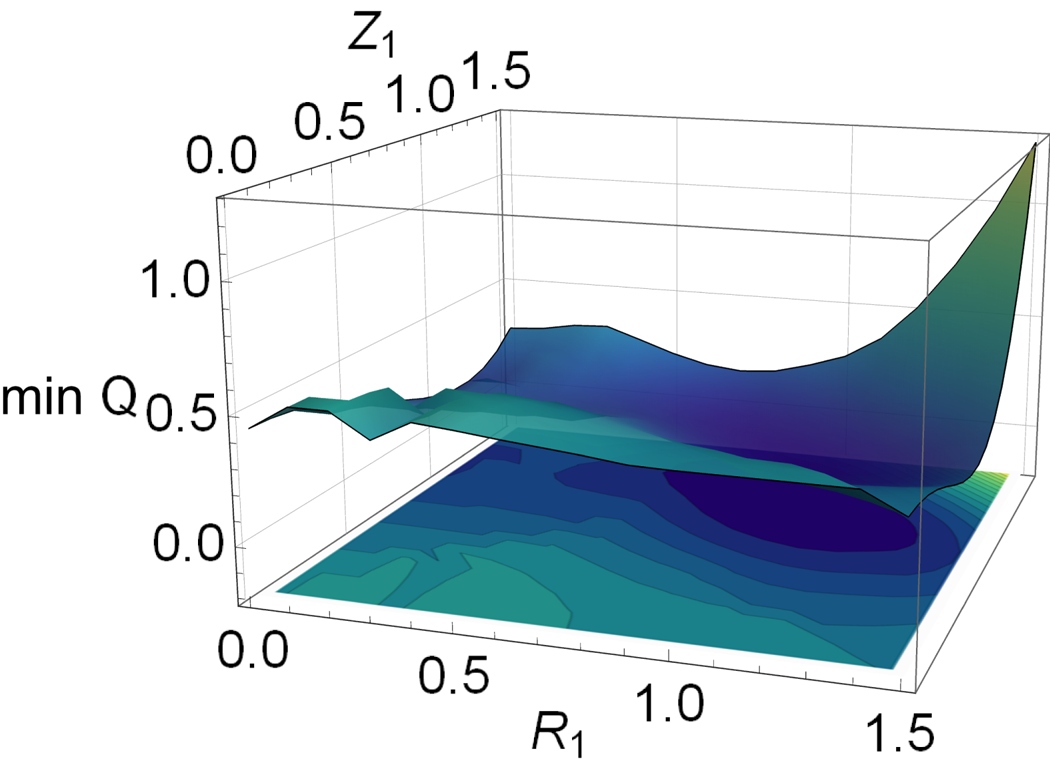
Figure 10. The minimized cost function $\min _{R_2,R_3}Q(R_1,R_2,R_3,Z_1)$ with respect to $R_1$
with respect to $R_1$ and $Z_1$
and $Z_1$ .
.
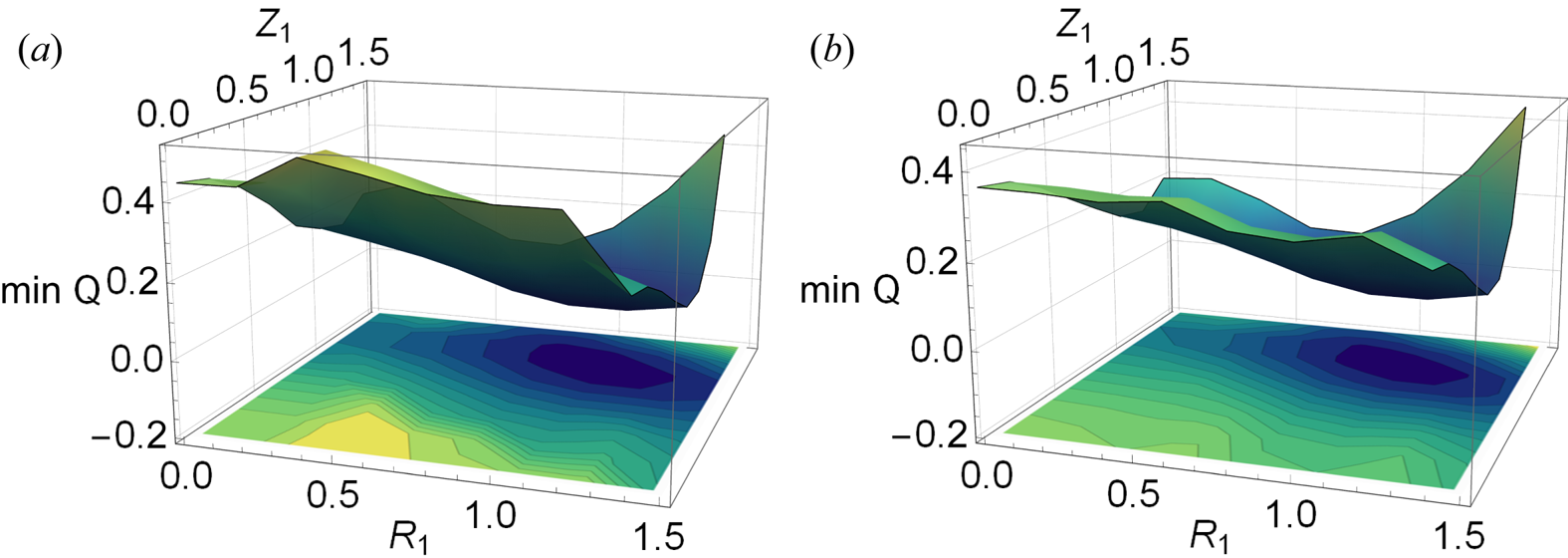
Figure 11. The minimized cost function $\min _{R_2,R_3,R_4,R_5} Q(R_1,R_2,R_3,R_4,R_5,Z_1$ with respect to $R_1$
with respect to $R_1$ and $Z_1$
and $Z_1$ : (a) using a non-global optimization algorithm; (b) using Differential Evolution – a global optimization routine.
: (a) using a non-global optimization algorithm; (b) using Differential Evolution – a global optimization routine.
5.2. Fourier representation of stellarators
We now turn to examples of explicit choices of the coefficients $R_{m,n},Z_{m,n}, \rho _{m,n}$ and $b_n$
and $b_n$ , corresponding to stellarator plasma boundaries that have been explored in this context in the past. We begin with examples from Hirshman & Meier (Reference Hirshman and Meier1985), who analysed shapes using spectral condensation, thus providing a convenient point of comparison with this technique.
, corresponding to stellarator plasma boundaries that have been explored in this context in the past. We begin with examples from Hirshman & Meier (Reference Hirshman and Meier1985), who analysed shapes using spectral condensation, thus providing a convenient point of comparison with this technique.
We start with a planar D-shaped boundary given by $R=-0.23+0.989 \cos \theta + 0.137 \cos 2\theta$ and $Z=1.41 \sin \theta - 0.109 \sin 2 \theta$
and $Z=1.41 \sin \theta - 0.109 \sin 2 \theta$ after spectral condensation (Hirshman & Meier Reference Hirshman and Meier1985). We use Fourier decomposition to obtain the coefficients in our unique boundary representation that reproduce this boundary, restricting the number of modes $m$
after spectral condensation (Hirshman & Meier Reference Hirshman and Meier1985). We use Fourier decomposition to obtain the coefficients in our unique boundary representation that reproduce this boundary, restricting the number of modes $m$ to be such that all the coefficients exceed $0.01$
to be such that all the coefficients exceed $0.01$ . The result is $R_{00}=-0.306, b_0=1.426$
. The result is $R_{00}=-0.306, b_0=1.426$ and $\rho =0.957 \cos \theta + 0.207 \cos 2\theta + 0.032 \cos 3 \theta$
and $\rho =0.957 \cos \theta + 0.207 \cos 2\theta + 0.032 \cos 3 \theta$ .
.
Hirshman and Meier also considered a bean-shaped surface given by $R=-0.320+1.115 \cos \theta + 0.383 \cos 2\theta - 0.0912 \cos$ $3\theta + 0.0358 \cos 4 \theta - 0.0164 \cos 5\theta$
$3\theta + 0.0358 \cos 4 \theta - 0.0164 \cos 5\theta$ and $Z= 1.408 \sin \theta + 0.154 \sin 2 \theta - 0.0264 \sin 3\theta$
and $Z= 1.408 \sin \theta + 0.154 \sin 2 \theta - 0.0264 \sin 3\theta$ after spectral condensation. Applying our representation to this case, we obtain $R_{00}=-0.184, b_0=1.419$
after spectral condensation. Applying our representation to this case, we obtain $R_{00}=-0.184, b_0=1.419$ and $\rho =1.184 \cos \theta + 0.208 \cos 2\theta - 0.143 \cos 3 \theta$
and $\rho =1.184 \cos \theta + 0.208 \cos 2\theta - 0.143 \cos 3 \theta$ $+ 0.064 \cos 4\theta - 0.032 \cos 5 \theta + 0.011 \cos 6 \theta$
$+ 0.064 \cos 4\theta - 0.032 \cos 5 \theta + 0.011 \cos 6 \theta$ . Our represen tation thus needs even fewer Fourier harmonics than this spectral condensation.Footnote 5
. Our represen tation thus needs even fewer Fourier harmonics than this spectral condensation.Footnote 5
Finally, we consider a representative example from Wendelstein 7-X, where the magnetic field in the so-called standard configuration was calculated using an equilibrium solver in free-boundary mode. As shown in figure 13, the resulting plasma boundary can be faithfully reproduced with mode numbers $m\leqslant 5$ and $|n|\leqslant 3$
and $|n|\leqslant 3$ .
.
Figure 12. D shape and bean shape reproduced based on Hirshman & Meier (Reference Hirshman and Meier1985), where the solution of our boundary representation overlaps with the original boundary: (a) D shape; (b) Bean shape.
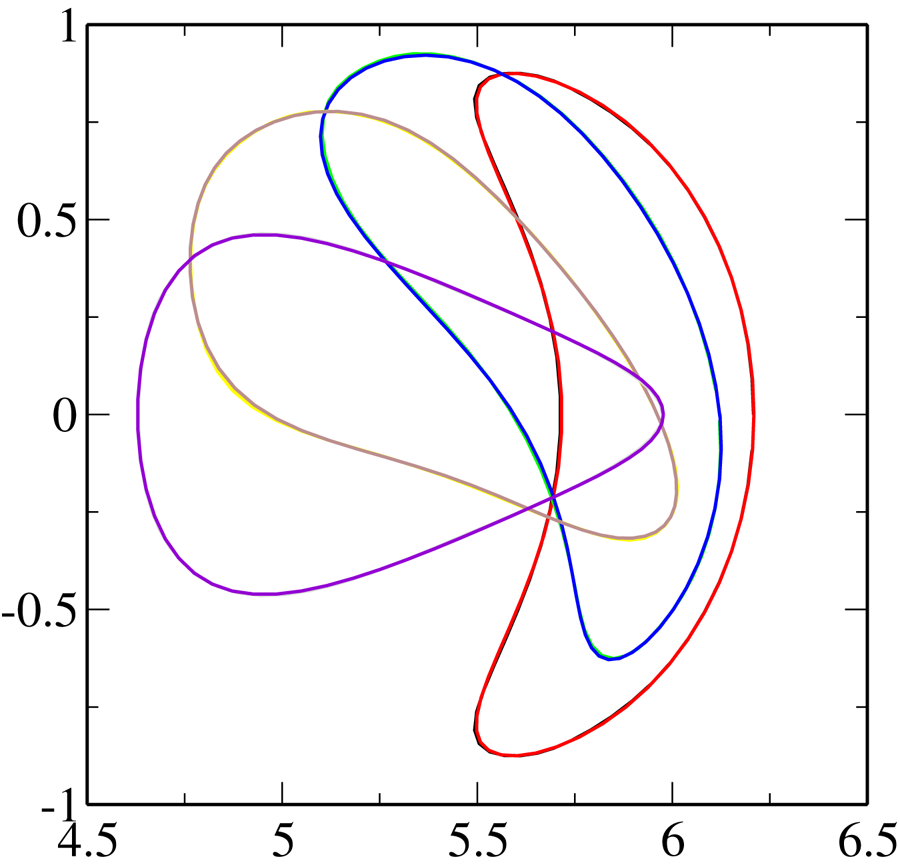
Figure 13. The boundary at different toroidal angle of Wendelstein 7-X. The original overlaps mostly with the replication.
Thus, the representation proposed in § 4 can accurately and economically reproduce relevant plasma boundary shapes, including Wendelstein 7-X and other cases studied earlier in the literature. It does not always need as few Fourier harmonics as spectral condensation, but for ‘reasonable’ shapes, it appears comparable in efficiency and avoids the need for computational optimization, which is an integral part of the spectral condensation technique.
5.3. Application to 3-D stellarator optimization
Finally, we put our boundary representation to the test in a real stellarator optimization problem, where the plasma boundary serves as the input for a fixed-boundary equilibrium calculation and is adjusted iteratively until a target function reflecting plasma performance has been minimized. As described in the introduction, § 1, such optimization calculations have, in the past, usually been performed with the ambiguous boundary representation (1.1).
We start the optimization with a rotating elliptical boundary, figure 14, and use the optimization code ROSE (Drevlak et al. Reference Drevlak, Beidler, Geiger, Helander and Turkin2019) with the equilibrium code VMEC and a non-gradient, non-global optimization algorithm (Brent). The target rotational transform is chosen to be 0.25 on axis and 0.35 at the plasma boundary, and in addition, we require the magnetic well to exceed a certain threshold (0.1) and the toroidal projection of the plasma boundary to be convex in every point.
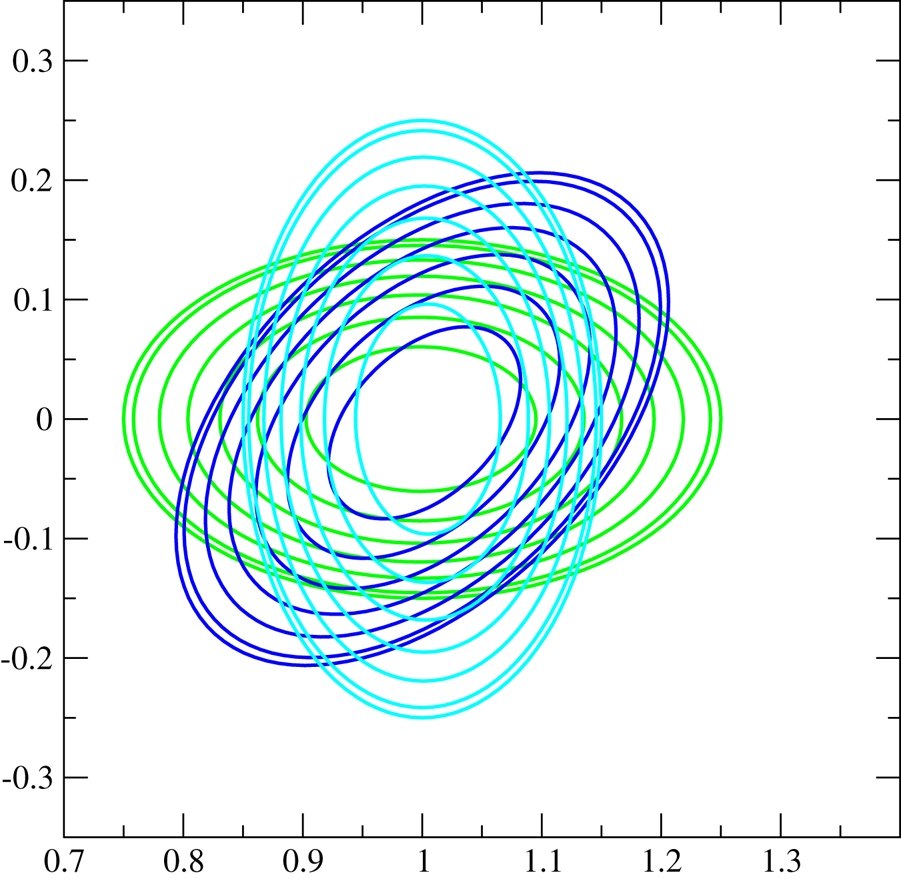
Figure 14. Flux surfaces at different toroidal cross-sections of rotating ellipse at toroidal angle $\varphi =0^{\circ }$ (green), $45^{\circ }$
(green), $45^{\circ }$ (dark blue) and $90^{\circ }$
(dark blue) and $90^{\circ }$ (cyan).
(cyan).
As is usual in this type of optimization, the target function $f$ is a weighted sum of squares,
is a weighted sum of squares,
where $F_i$ is the value for criterion $i$
is the value for criterion $i$ , $\tilde {F}_i$
, $\tilde {F}_i$ the corresponding target value and $w_i$
the corresponding target value and $w_i$ the $i$
the $i$ ’th weight, which can be adjusted to obtain various different optimal (Pareto) points.
’th weight, which can be adjusted to obtain various different optimal (Pareto) points.
Of course, the performance of the optimization depends on the exact choice of $w_i$ and $F_i$
and $F_i$ as well as the initial condition, but we find that the results turn out much better, and more quickly, with the novel representation than with the standard one used in VMEC. With the same weights chosen for both cases, we typically obtain a penalty value $f$
as well as the initial condition, but we find that the results turn out much better, and more quickly, with the novel representation than with the standard one used in VMEC. With the same weights chosen for both cases, we typically obtain a penalty value $f$ that is two orders of magnitude smaller when the new boundary representation is employed. The resulting configuration is thus significantly different, and much better, than that obtained with the conventional method. An example of how the plasma boundaries differ is shown in figure 15. In this example, all the aims of the optimization were attained when the novel scheme was used, whereas the usual one did not succeed in achieving the prescribed rotational transform and a non-concave plasma boundary. Similar results have also been found with other, more complicated, optimization targets.
that is two orders of magnitude smaller when the new boundary representation is employed. The resulting configuration is thus significantly different, and much better, than that obtained with the conventional method. An example of how the plasma boundaries differ is shown in figure 15. In this example, all the aims of the optimization were attained when the novel scheme was used, whereas the usual one did not succeed in achieving the prescribed rotational transform and a non-concave plasma boundary. Similar results have also been found with other, more complicated, optimization targets.
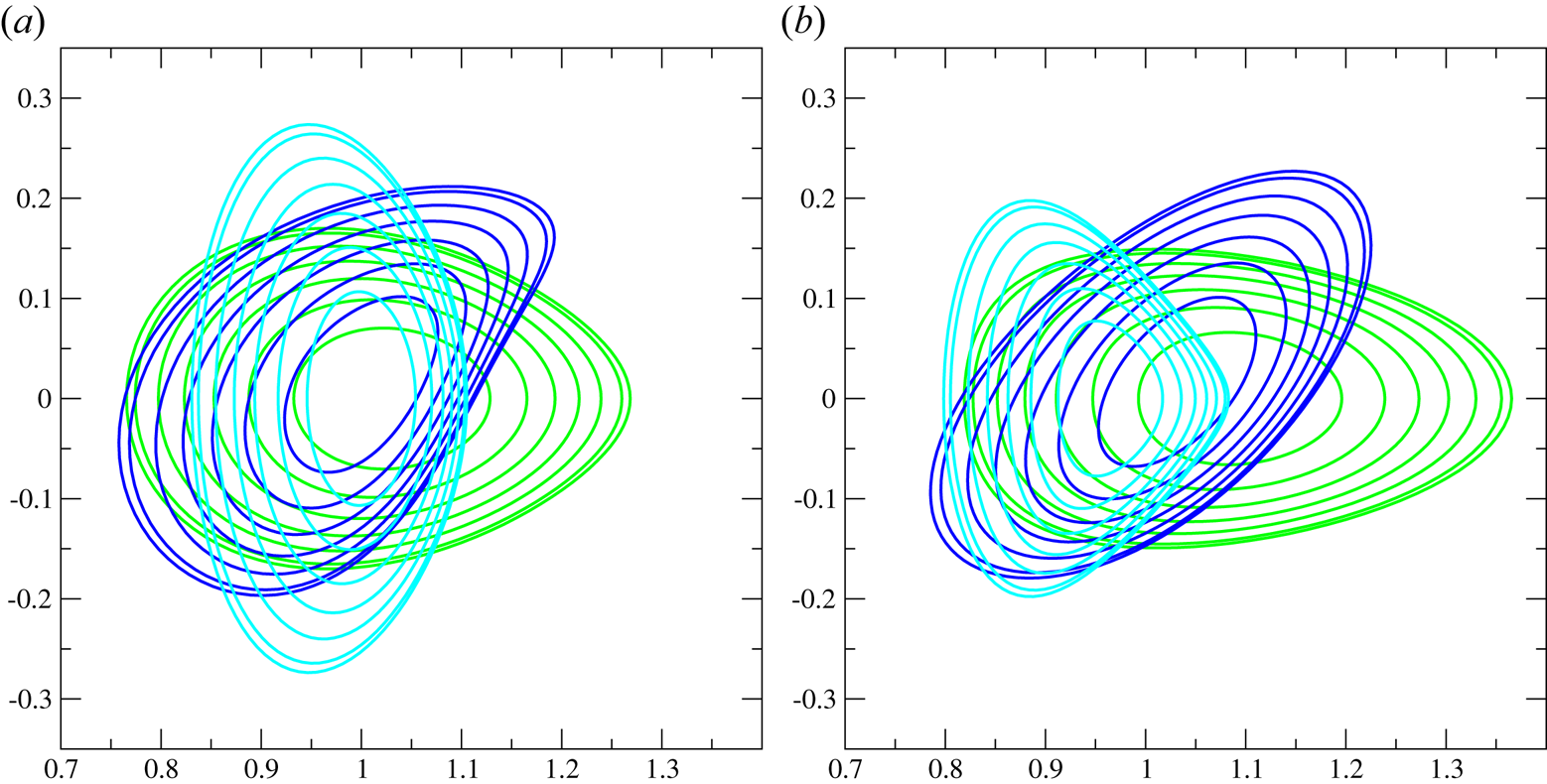
Figure 15. The poloidal cross-sections of optimized plasma boundary and flux surfaces with simple penalty function for the toroidal angles $\varphi =0^{\circ }$ (green), $45^{\circ }$
(green), $45^{\circ }$ (dark blue) and $90^{\circ }$
(dark blue) and $90^{\circ }$ (cyan): (a) cross-sections of optimized plasma boundary using standard VMEC boundary representation; (b) cross-sections of optimized plasma boundary using unique boundary representation described in § 4.
(cyan): (a) cross-sections of optimized plasma boundary using standard VMEC boundary representation; (b) cross-sections of optimized plasma boundary using unique boundary representation described in § 4.
6. Conclusions
In summary, the usual Fourier series representation of the plasma boundary used in stellarator optimization contains much redundancy owing to the arbitrariness of the poloidal angle. This redundancy grows exponentially with the number of terms in the series and unnecessarily increases the dimensionality of the search. It causes a plethora of local minima to appear in the optimization landscape, as can be illustrated with simple 2-D examples. The situation can be remedied by making the poloidal angle unique, but some care must be taken to ensure that simple stellarator shapes can still be represented in an economical way. When this is done, local minima are eliminated and the optimization proceeds more rapidly than with the usual representation. The outcome also tends to be better, especially if a non-global optimization algorithm is used.
Our specific boundary parametrization (4.10)–(4.11) is simple and intuitive, and requires less computation than the spectral condensation method, but it cannot describe stellarator boundaries with multiple maxima in the $\zeta$ -direction. Such boundaries are however highly unusual, and the representation can easily be generalized to include such shapes.
-direction. Such boundaries are however highly unusual, and the representation can easily be generalized to include such shapes.
Acknowledgements
The primary author would like to thank B. Kugelmann, G. Plunk and B. Shanahan for helpful conversations.
Editor William Dorland thanks the referees for their advice in evaluating this article.
Funding
This work has been carried out in the framework of the EUROfusion Consortium and has received funding from the Euratom research and training programmes 2014–2018 and 2019–2020 under grant agreement no. 633053. It was also supported by a grant from the Simons Foundation (560651, P.H.). The views and opinions expressed herein do not necessarily reflect those of the European Commission.
Declaration of interests
The authors report no conflict of interest.







































































 Open access
Open access