



No CrossRef data available.
Article contents
Reflection of a centred compression wave
Published online by Cambridge University Press: 26 March 2024
Abstract
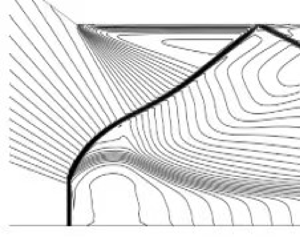
The reflection of a centred compression wave, that converges to a single point on the reflecting surface, is studied and compared with shock reflection. It is shown that the double solution domain, with both regular and Mach reflections, of centred compression wave reflection is enlarged with respect to shock reflection. For centred compression wave reflection, no clear triple point structure exists, and instead, the reflected shock and Mach stem form a smooth curved shock wave. Moreover, the relative Mach stem height, though decreasing almost linearly with the relative wedge trailing edge height as in shock reflection, has a lower bound when the trailing edge height increases, meaning that wedge height variation induced transition, that occurs in shock reflection, does not exist. The existence of this lower bound is due to the fact that beyond a certain value of the wedge trailing edge height, the wedge trailing edge encounters the wedge lower surface that generates the centred compression wave. The present study expands our knowledge of shock reflection, and may be useful for supersonic inlet design.
JFM classification
- Type
- JFM Papers
- Information
- Copyright
- © The Author(s), 2024. Published by Cambridge University Press
References
Azevedo, D.J. 1989 Analytical prediction of shock patterns in a high-speed wedge bounded duct. PhD thesis, Dept. Mech. & Aero. Engng, State University.Google Scholar
Azevedo, D.J. & Liu, C.S. 1993 Engineering approach to the prediction of shock patterns in bounded high-speed flows. AIAA J. 31, 83–90.Google Scholar
Bai, C.Y. 2023 Shock reflection with incident shock/wedge trailing edge expansion fan interaction. J. Fluid Mech. 968, A21.CrossRefGoogle Scholar
Bai, C.Y. & Wu, Z.N. 2017 Size and shape of shock waves and slipline for Mach reflection in steady flow. J. Fluid Mech. 818, 116–140.CrossRefGoogle Scholar
Bai, C.Y. & Wu, Z.N. 2021 A study of the dependence of the Mach stem height on the trailing edge height. Fluids 6 (9), 313.Google Scholar
Ben-Dor, G., Ivanov, M., Vasilev, E.I. & Elperin, T. 2002 Hysteresis processes in the regular reflection to Mach reflection transition in steady flows. Prog. Aerosp. Sci. 38, 347–387.CrossRefGoogle Scholar
Busemann, A. 1942 Die achsensymmetrische kegelige Uberschallstromung. Luftfahrtforschung 19, 137–144.Google Scholar
Chernyshov, M.V., Savelova, K.E. & Kapralova, A.S. 2021 Approximate analytical models of shock-wave structure at steady Mach reflection. Fluids 6, 305.Google Scholar
Choe, S.G. 2022 A method for predicting Mach stem height in steady flows. Proc. Inst. Mech. Engrs. G 236 (1), 3–10.Google Scholar
Gao, B. & Wu, Z.N. 2010 A study of the flow structure for Mach reflection in steady supersonic flow. J. Fluid Mech. 656, 29–50.Google Scholar
Grasso, F. & Paoli, R. 1999 An analytical study of Mach reflection in nonequilibrium steady flows. Phys. Fluids 11 (10), 3150–3167.Google Scholar
Guan, X.K., Bai, C.Y., Lin, J. & Wu, Z.N. 2020 Mach reflection promoted by an upstream shock wave. J. Fluid Mech. 903, A44.Google Scholar
Guan, X.K., Bai, C.Y. & Wu, Z.N. 2018 Steady Mach reflection with two incident shock waves. J. Fluid Mech. 855, 882–909.Google Scholar
Guan, X.K., Bai, C.Y. & Wu, Z.N. 2020 Double solution and influence of secondary waves on transition criteria for shock interference in pre-Mach reflection with two incident shock waves. J. Fluid Mech. 887, A22.Google Scholar
Hekiri, H. & Emanuel, G. 2015 Structure and morphology of a triple point. Phys. Fluids 27, 056102.Google Scholar
Henderson, L.F. & Lozzi, A. 1975 Experiments on transition of Mach reflection. J. Fluid Mech. 68, 139–155.Google Scholar
Henderson, L.F. & Lozzi, A. 1979 Further experiments on transition to Mach reflexon. J. Fluid Mech. 94, 541–559.CrossRefGoogle Scholar
Hornung, H.G. 1986 Regular and Mach reflections of shock waves. Annu. Rev. Fluid Mech. 18, 33–58.Google Scholar
Hornung, H.G. 2014 Mach reflection in steady flow. I. Mikhail Ivanov's contributions. II. Caltech stability experiments. AIP Conf. Proc. 1628, 1384–1393.CrossRefGoogle Scholar
Hornung, H.G., Oertel, H. & Sandeman, R.J. 1979 Transition to Mach reflection of shock waves in steady and pseudo-steady flows with and without relaxation. J. Fluid Mech. 90, 541–560.Google Scholar
Hornung, H.G. & Robinson, M.L. 1982 Transition from regular to Mach reflection of shock waves. Part 2. The steady-flow criterion. J. Fluid Mech. 123, 155–164.CrossRefGoogle Scholar
Ivanov, M.S., Klemenkov, G.P., Kudryavtsev, A.N., Fomin, V.M. & Kharitonov, A.M. 1997 Experimental investigation of transition to Mach reflection of steady shock waves. Dokl. Akad. Nauk 357 (5), 623–627.Google Scholar
Ivanov, M.S., Kudryavtsev, A.N. & Khotyanovskii, D.V. 2000 Numerical simulation of the transition between the regular and Mach reflection of shock waves under the action of local perturbations. Dokl. Phys. 45 (7), 353–357.CrossRefGoogle Scholar
Ivanov, M.S., Markelov, G.N., Kudryavtsev, A.N. & Gimelshein, S.E. 1998 Numerical analysis of shock wave reflection transition in steady flows. AIAA J. 36, 2079–2086.Google Scholar
Kudryavtsev, A.N., Khotyanovsky, D.V., Ivanov, M.S. & Vandromme, D. 2002 Numerical investigations of transition between regular and Mach reflections caused by free-stream disturbances. Shock Waves 1 (2), 157–165.Google Scholar
Li, H. & Ben-Dor, G. 1997 A parametric study of Mach reflection in steady flows. J. Fluid Mech. 341, 101–125.Google Scholar
Li, S.G., Gao, B. & Wu, Z.N. 2011 Time history of regular to Mach reflection transition in steady supersonic flow. J. Fluid Mech. 682, 160–184.Google Scholar
Mach, E. 1878 Uber den verlauf von Funkenwellen in der Ebene und im Raume. Sitz.ber. Akad. Wiss. Wien 78, 819–838.Google Scholar
Mouton, C.A. & Hornung, H.G. 2007 Mach stem height and growth rate predictions. AIAA J. 45, 1977–1987.Google Scholar
Ogawa, H., Moder, S., Timofeev, E.V. & Boyce, R.R. 2015 Startability and Mach reflection hysteresis of shortened Busemann intakes for axisymmetric scramjet engines. In 29th International Symposium on Shock Waves 1. ISSW 2013 (ed. R. Bonazza & D. Ranjan). Springer.Google Scholar
Schotz, M., Levy, A., Ben-Dor, G. & Igra, O. 1997 Analytical prediction of the wave configuration size in steady flow Mach reflections. Shock Waves 7 (6), 363–372.CrossRefGoogle Scholar
Shoesmith, B. & Timofeev, E. 2021 Modelling of Mach reflections in internal axisymmetric steady supersonic flow. Shock Waves 31 (8), 945–957.Google Scholar
Vinoth, P., Sushmitha, J. & Rajesh, G. 2022 Prediction of Mach stem height in compressible open jets. Part 1. Overexpanded jets. J. Fluid Mech. 942, A48.Google Scholar
Von Neumann, J. 1943 Oblique reflection of shock. Explos. Res. Rep. 12. Navy Dept., Bureau of Ordinance.Google Scholar
Von Neumann, J. 1945 Refraction, intersection and reflection of shock waves. NAVORD Rep. 203–245. Navy Dept., Bureau of Ordinance.Google Scholar
Vuillon, J., Zeiton, D. & Ben-Dor, G. 1995 Reconstruction of oblique shock wave reflection in steady flows. Part 2. Numerical investigation. J. Fluid Mech. 301, 37–50.CrossRefGoogle Scholar