



Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Daddi-Moussa-Ider, Abdallah
and
Vilfan, Andrej
2025.
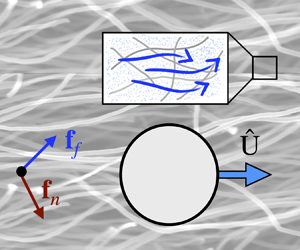
On force balance in Brinkman fluids under confinement.
Journal of Fluid Mechanics,
Vol. 1008,
Issue. ,