






1. Background and introduction
Non-equilibrium active suspensions of microscopic agents that generate internal stress have been studied extensively, typically as a model of living material, such as a cell interior or a suspension of bacteria (Marchetti et al. Reference Marchetti, Joanny, Ramaswamy, Liverpool, Prost, Rao and Simha2013; Saintillan & Shelley Reference Saintillan and Shelley2015; Needleman & Dogic Reference Needleman and Dogic2017; Saintillan Reference Saintillan2018). The root mechanism in simple models is a strain-induced alignment of the suspended agents such that they exert a net internal stress. The most interesting circumstances are when the overall suspension is unstable (Simha & Ramaswamy Reference Simha and Ramaswamy2002), for which perturbations overcome viscous resistance to form large-scale flow patterns (Dombrowski et al. Reference Dombrowski, Cisneros, Chatkaew, Goldstein and Kessler2004). Unconstrained, this leads to a chaotic swirling flow pattern, whereas confinement in a container organizes the flow. For a sufficiently small round container, the chaotic swirls are replaced by a lone circulating vortex, and all flow ceases if the container is still smaller (Wioland et al. Reference Wioland, Woodhouse, Dunkel, Kessler and Goldstein2013; Lushi, Wioland & Goldstein Reference Lushi, Wioland and Goldstein2014). Similar low-dissipation global flow patterns arise in other geometries (Opathalage et al. Reference Opathalage, Norton, Juniper, Langeslay, Aghvami, Fraden and Dogic2019), and become increasingly complex in more complex containers (Hardoüin et al. Reference Hardoüin, Laurent, Lopez-Leon, Ignés-Mullol and Sagués2020). Confinement within an immiscible droplet leads to additional behaviours, coupled with the deformability of the drop shape and its motion within the fluid beyond (Young, Shelley & Stein Reference Young, Shelley and Stein2021). Particularly relevant to the present study, the suspension can also drive motion of rigid boundaries, making a Taylor–Couette device into a motor (Fürthauer et al. Reference Fürthauer, Neef, Grill, Kruse and Jülicher2012) and inducing a negative drag for a sphere moving in a small periodic domain (Foffano et al. Reference Foffano, Lintuvuori, Stratford, Cates and Marenduzzo2012).
The suspension that we consider is a simple example of this class, constructed of uniformly distributed advected agents that orient only in response to the local strain-rate histories that they experience. Phenomenologically, this is taken to be an alignment of their otherwise uniformly distributed active axes, yielding a net internal fluid stress. Translational and rotational diffusion relax their orientation distribution towards uniform. The basic instabilities of such an active fluid are understood (Ezhilan, Shelley & Saintillan Reference Ezhilan, Shelley and Saintillan2013; Marchetti et al. Reference Marchetti, Joanny, Ramaswamy, Liverpool, Prost, Rao and Simha2013). Unconfined, they are long-wavelength, which loosely explains how they are mediated by the length scales of any geometric confinement. In general, stronger activity can overcome viscous resistance at smaller scales to the point where a seemingly chaotic, turbulence-like flow with a range of length scales develops (Gao et al. Reference Gao, Betterton, Jhang and Shelley2017; Theillard, Alonso-Matilla & Saintillan Reference Theillard, Alonso-Matilla and Saintillan2017).
Many active suspensions are motivated by biological systems, where a far more complex active microstructure can drive intracellular flow, cell mobility and embryonic development. Here, we consider how this simplest suspension interacts with an inactive rigid object, freely suspended and much larger than the active agents. Investigation focuses on how the object is transported by the suspension within a larger container. The object is anticipated to couple with the suspension in several ways. For a close spacing between it and the container wall, viscous resistance will suppress local instabilities, as would any narrow confinement. However, this aspect of confinement is potentially countered by motion of the object, which will apply a correlated and potentially strong strain rate to the fluid between it and the container wall, which will in turn instigate a coordinated response in the suspension. Several questions are considered regarding the resulting phenomenology. Does it have stable positions or distances from the container wall? Does the active suspension transport it to the container wall or keep it free floating? These questions intersect with past observations regarding how a container of decreasing size first organizes and then suppresses suspension instabilities (Wioland et al. Reference Wioland, Woodhouse, Dunkel, Kessler and Goldstein2013; Lushi et al. Reference Lushi, Wioland and Goldstein2014). A simple circular object suspended in a circular container is used to identify the basic phenomenology. Such a configuration shares features with, for example, the transport of an organelle within a cell or a colloidal particle in a suspension of motile microbes, but it is designed primarily to simply illuminate mechanisms that are potentially important in any such system. With such a motivation, this configuration builds on multiple studies in fixed (Gao et al. Reference Gao, Betterton, Jhang and Shelley2017; Hardoüin et al. Reference Hardoüin, Laurent, Lopez-Leon, Ignés-Mullol and Sagués2020) and rotating (Fürthauer et al. Reference Fürthauer, Neef, Grill, Kruse and Jülicher2012) annular geometries, now with the inner rigid boundary replaced with a zero-inertia free-floating object.
After introducing the simulation model and methods in § 2, results are considered in three stages. For weak activity in § 3, the basic circulating flow is a relatively straightforward generalization of cases considered previously. However, there is now also a slow geometric instability that eventually leads to cessation of all suspension activity in the container, leaving the object immobile, arrested near the container wall. In contrast, for strong activity in § 4, the flow is chaotic and complex. Still, the gross features of the phenomenology of the suspended object and its transport are identifiable and explain why in this case the free-floating object is effectively repelled from the container wall. Section 5 bridges these weak and strong limits. It is only for these intermediate strengths that persistent transport along the container wall or contact with the container might occur. Animated visualizations of representative cases are provided as supplementary movies (movies 1–10) available at https://doi.org/10.1017/jfm.2023.191.
2. Simulation details
2.1. Active suspension model
The model for the active suspension is exactly that of Gao et al. (Reference Gao, Betterton, Jhang and Shelley2017), which itself builds on several earlier developments (Simha & Ramaswamy Reference Simha and Ramaswamy2002; Saintillan & Shelley Reference Saintillan and Shelley2008). The active components are uniformly distributed immotile extensor (or contractor) particles. Specifically, we use their coarse-grained model with the Bingham closure that they introduce. For simplicity, we considered only the limit of a diffuse suspension, which represents the basic phenomenology without the added complexity of steric alignment of the active agents and their volume fraction (in their notation,  $\zeta = 0$ and
$\zeta = 0$ and  $\beta = 0$). This is sufficient to provide a representative phenomenology for an immersed object. The original discussion of the model is complete (Gao et al. Reference Gao, Betterton, Jhang and Shelley2017), so we provide only a summary of it. The same model has been used subsequently to study flow in additional geometries (Chen, Gao & Gao Reference Chen, Gao and Gao2018) and in liquid drops (Young et al. Reference Young, Shelley and Stein2021). This and similar models reproduce key features of active suspension experiments, even without the inclusion of steric alignment (Theillard et al. Reference Theillard, Alonso-Matilla and Saintillan2017).
$\beta = 0$). This is sufficient to provide a representative phenomenology for an immersed object. The original discussion of the model is complete (Gao et al. Reference Gao, Betterton, Jhang and Shelley2017), so we provide only a summary of it. The same model has been used subsequently to study flow in additional geometries (Chen, Gao & Gao Reference Chen, Gao and Gao2018) and in liquid drops (Young et al. Reference Young, Shelley and Stein2021). This and similar models reproduce key features of active suspension experiments, even without the inclusion of steric alignment (Theillard et al. Reference Theillard, Alonso-Matilla and Saintillan2017).
The viscous flow equations are augmented with an internal stress  $\alpha {\boldsymbol{\mathsf{D}}}$:
$\alpha {\boldsymbol{\mathsf{D}}}$:
 \begin{gather} -\boldsymbol{\nabla}\boldsymbol{\cdot}\left(\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}\right) + \boldsymbol{\nabla} p = \boldsymbol{\nabla} \boldsymbol{\cdot} (\alpha {\boldsymbol{\mathsf{D}}}), \end{gather}
\begin{gather} -\boldsymbol{\nabla}\boldsymbol{\cdot}\left(\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}\right) + \boldsymbol{\nabla} p = \boldsymbol{\nabla} \boldsymbol{\cdot} (\alpha {\boldsymbol{\mathsf{D}}}), \end{gather} \begin{gather}\boldsymbol{\nabla} \boldsymbol{\cdot} {\boldsymbol{u}} = 0, \end{gather}
\begin{gather}\boldsymbol{\nabla} \boldsymbol{\cdot} {\boldsymbol{u}} = 0, \end{gather}
where  ${\boldsymbol {u}}$ is the velocity, and
${\boldsymbol {u}}$ is the velocity, and  $p$ is the pressure that enforces its incompressibility. The coefficient
$p$ is the pressure that enforces its incompressibility. The coefficient  $\alpha$ is negative for the case of extensors that we consider. More specifically,
$\alpha$ is negative for the case of extensors that we consider. More specifically,  $\alpha$ is the dipolar strength
$\alpha$ is the dipolar strength  $\sigma _a$ of the extensors, normalized by a velocity
$\sigma _a$ of the extensors, normalized by a velocity  $U_o$, length
$U_o$, length  $\ell$, and the Newtonian viscosity of the suspension
$\ell$, and the Newtonian viscosity of the suspension  $\mu$:
$\mu$:  $\alpha \equiv \sigma _a/\mu U_o \ell ^2$. For most cases, the immersed object has unit radius so
$\alpha \equiv \sigma _a/\mu U_o \ell ^2$. For most cases, the immersed object has unit radius so  $\ell = 1$ is appropriate. Alignment of the suspension agents is represented by tensor order parameter
$\ell = 1$ is appropriate. Alignment of the suspension agents is represented by tensor order parameter  ${\boldsymbol{\mathsf{D}}}$, which is governed by an advection–diffusion equation:
${\boldsymbol{\mathsf{D}}}$, which is governed by an advection–diffusion equation:
 \begin{equation} \frac{\partial {\boldsymbol{\mathsf{D}}}}{\partial t} + {\boldsymbol{u}} \boldsymbol{\cdot} \boldsymbol{\nabla} {\boldsymbol{\mathsf{D}}} - (\boldsymbol{\nabla}{\boldsymbol{u}} \boldsymbol{\cdot} {\boldsymbol{\mathsf{D}}} + {\boldsymbol{\mathsf{D}}} \boldsymbol{\cdot} \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}) ={-} \left(\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}\right)\boldsymbol{:} {\boldsymbol{\mathsf{S}}} + d_T\,\nabla^2 {\boldsymbol{\mathsf{D}}} - 4 d_R({\boldsymbol{\mathsf{D}}} - {\boldsymbol{\mathsf{I}}}/2). \end{equation}
\begin{equation} \frac{\partial {\boldsymbol{\mathsf{D}}}}{\partial t} + {\boldsymbol{u}} \boldsymbol{\cdot} \boldsymbol{\nabla} {\boldsymbol{\mathsf{D}}} - (\boldsymbol{\nabla}{\boldsymbol{u}} \boldsymbol{\cdot} {\boldsymbol{\mathsf{D}}} + {\boldsymbol{\mathsf{D}}} \boldsymbol{\cdot} \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}) ={-} \left(\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}\right)\boldsymbol{:} {\boldsymbol{\mathsf{S}}} + d_T\,\nabla^2 {\boldsymbol{\mathsf{D}}} - 4 d_R({\boldsymbol{\mathsf{D}}} - {\boldsymbol{\mathsf{I}}}/2). \end{equation}
The left-hand side of this equation is the usual upper convective Maxwell advection of a tensor. On the right-hand side,  $d_T\equiv vD_T/b U_o$ is a non-dimensional coefficient of translational diffusion, and
$d_T\equiv vD_T/b U_o$ is a non-dimensional coefficient of translational diffusion, and  $d_R \equiv b D_R/v U_o$ is a coefficient of rotational diffusion towards isotropy (
$d_R \equiv b D_R/v U_o$ is a coefficient of rotational diffusion towards isotropy ( ${\boldsymbol{\mathsf{D}}} = {\boldsymbol{\mathsf{I}}}/2$), here written explicitly for two space dimensions. The physical parameters that constitute
${\boldsymbol{\mathsf{D}}} = {\boldsymbol{\mathsf{I}}}/2$), here written explicitly for two space dimensions. The physical parameters that constitute  $d_T$ and
$d_T$ and  $d_R$ are the particle rotational diffusivity
$d_R$ are the particle rotational diffusivity  $D_R$, the particle translational diffusivity
$D_R$, the particle translational diffusivity  $D_T$, the effective particle volume fraction
$D_T$, the effective particle volume fraction  $v$, and the particle dimension
$v$, and the particle dimension  $b$. Except when noted,
$b$. Except when noted,  $d_T = d_R = 0.025$ in the current simulations. The term involving the rank-four tensor
$d_T = d_R = 0.025$ in the current simulations. The term involving the rank-four tensor  ${\boldsymbol{\mathsf{S}}}$ represents how strain rates orient the active agents, leading to their net active stress. For
${\boldsymbol{\mathsf{S}}}$ represents how strain rates orient the active agents, leading to their net active stress. For  ${\boldsymbol{\mathsf{S}}}$, Gao et al. (Reference Gao, Betterton, Jhang and Shelley2017) employed a closure based on the fourth moment of the microscopic distribution function
${\boldsymbol{\mathsf{S}}}$, Gao et al. (Reference Gao, Betterton, Jhang and Shelley2017) employed a closure based on the fourth moment of the microscopic distribution function  $\varPsi ({\boldsymbol {x}},{\boldsymbol {p}},t)$, which underlies the coarse-grained average of the active agent distribution:
$\varPsi ({\boldsymbol {x}},{\boldsymbol {p}},t)$, which underlies the coarse-grained average of the active agent distribution:
 \begin{equation}
1 = \int_0^{2{\rm \pi}} \varPsi\,{\rm d}\theta, \quad
{\boldsymbol{\mathsf{D}}}({\boldsymbol{x}},t) = \int_0^{2{\rm \pi}}
{\boldsymbol{p}}{\boldsymbol{p}}
\,\varPsi\,{\rm d}\theta, \quad
{\boldsymbol{\mathsf{S}}}({\boldsymbol{x}},t) = \int_0^{2{\rm \pi}}
{\boldsymbol{p}}{\boldsymbol{p}}{\boldsymbol{p}}{\boldsymbol{p}}\,
\varPsi \,{\rm d}\theta,
\end{equation}
\begin{equation}
1 = \int_0^{2{\rm \pi}} \varPsi\,{\rm d}\theta, \quad
{\boldsymbol{\mathsf{D}}}({\boldsymbol{x}},t) = \int_0^{2{\rm \pi}}
{\boldsymbol{p}}{\boldsymbol{p}}
\,\varPsi\,{\rm d}\theta, \quad
{\boldsymbol{\mathsf{S}}}({\boldsymbol{x}},t) = \int_0^{2{\rm \pi}}
{\boldsymbol{p}}{\boldsymbol{p}}{\boldsymbol{p}}{\boldsymbol{p}}\,
\varPsi \,{\rm d}\theta,
\end{equation}
where in two space dimensions  ${\boldsymbol {p}} = (\cos \theta,\sin \theta )$. In solving the combined system,
${\boldsymbol {p}} = (\cos \theta,\sin \theta )$. In solving the combined system,  ${\boldsymbol{\mathsf{D}}}$ is evolved per (2.3), and
${\boldsymbol{\mathsf{D}}}$ is evolved per (2.3), and  ${\boldsymbol{\mathsf{S}}}$ is closed by assuming a Bingham (Reference Bingham1974) distribution:
${\boldsymbol{\mathsf{S}}}$ is closed by assuming a Bingham (Reference Bingham1974) distribution:  $\varPsi ({\boldsymbol {x}},{\boldsymbol {p}},t) \approx \varPsi _B({\boldsymbol {x}},{\boldsymbol {p}},t) = A({\boldsymbol {x}},t) \exp [{\boldsymbol{\mathsf{B}}}({\boldsymbol {x}},t): {\boldsymbol {p}}{\boldsymbol {p}}]$. Following the basic approach of Chaubal & Leal (Reference Chaubal and Leal1998), also used by Gao et al. (Reference Gao, Betterton, Jhang and Shelley2017), this is solved by taking
$\varPsi ({\boldsymbol {x}},{\boldsymbol {p}},t) \approx \varPsi _B({\boldsymbol {x}},{\boldsymbol {p}},t) = A({\boldsymbol {x}},t) \exp [{\boldsymbol{\mathsf{B}}}({\boldsymbol {x}},t): {\boldsymbol {p}}{\boldsymbol {p}}]$. Following the basic approach of Chaubal & Leal (Reference Chaubal and Leal1998), also used by Gao et al. (Reference Gao, Betterton, Jhang and Shelley2017), this is solved by taking  ${\boldsymbol{\mathsf{B}}}$ to be trace-free and recognizing that it shares principal coordinates with
${\boldsymbol{\mathsf{B}}}$ to be trace-free and recognizing that it shares principal coordinates with  ${\boldsymbol{\mathsf{D}}}$, indicated here with a
${\boldsymbol{\mathsf{D}}}$, indicated here with a  $p$ superscript. In two space dimensions, this yields explicit expressions in terms of modified Bessel functions:
$p$ superscript. In two space dimensions, this yields explicit expressions in terms of modified Bessel functions:
 \begin{gather} {\mathsf{D}}_{11}^p = A {\rm \pi}\left[{\rm I}_0({\mathsf{B}}_{11}^p) + {\rm I}_1({\mathsf{B}}_{11}^p) \right], \end{gather}
\begin{gather} {\mathsf{D}}_{11}^p = A {\rm \pi}\left[{\rm I}_0({\mathsf{B}}_{11}^p) + {\rm I}_1({\mathsf{B}}_{11}^p) \right], \end{gather} \begin{gather}{\mathsf{D}}_{22}^p = A {\rm \pi}\left[{\rm I}_0({\mathsf{B}}_{11}^p) - {\rm I}_1({\mathsf{B}}_{11}^p) \right]. \end{gather}
\begin{gather}{\mathsf{D}}_{22}^p = A {\rm \pi}\left[{\rm I}_0({\mathsf{B}}_{11}^p) - {\rm I}_1({\mathsf{B}}_{11}^p) \right]. \end{gather}
Since  ${\boldsymbol{\mathsf{D}}}$ has unit trace,
${\boldsymbol{\mathsf{D}}}$ has unit trace,  ${\mathsf{B}}_{11}^p$ (
${\mathsf{B}}_{11}^p$ ( $= -{\mathsf{B}}_{22}^p$) solves
$= -{\mathsf{B}}_{22}^p$) solves
 \begin{equation} \frac{{\rm I}_1({\mathsf{B}}_{11}^p)}{{\rm I}_0({\mathsf{B}}_{11}^p)} ={-} \sqrt{1 - 4 ({\mathsf{D}}_{11} {\mathsf{D}}_{22} - {\mathsf{D}}_{12}^2)}, \end{equation}
\begin{equation} \frac{{\rm I}_1({\mathsf{B}}_{11}^p)}{{\rm I}_0({\mathsf{B}}_{11}^p)} ={-} \sqrt{1 - 4 ({\mathsf{D}}_{11} {\mathsf{D}}_{22} - {\mathsf{D}}_{12}^2)}, \end{equation}
which provides values for the non-zero components of  ${\boldsymbol{\mathsf{S}}}^p$:
${\boldsymbol{\mathsf{S}}}^p$:
 \begin{gather} {\mathsf{S}}_{1111}^p = A{\rm \pi} \left[{\rm I}_0({\mathsf{B}}_{11}^p) + \frac{2 {\mathsf{B}}_{11}^p-1}{2 {\mathsf{B}}_{11}^p}\,{\rm I}_1({\mathsf{B}}_{11}^p) \right], \end{gather}
\begin{gather} {\mathsf{S}}_{1111}^p = A{\rm \pi} \left[{\rm I}_0({\mathsf{B}}_{11}^p) + \frac{2 {\mathsf{B}}_{11}^p-1}{2 {\mathsf{B}}_{11}^p}\,{\rm I}_1({\mathsf{B}}_{11}^p) \right], \end{gather} \begin{gather}{\mathsf{S}}_{1122}^p = {\mathsf{S}}_{1212}^p = {\mathsf{S}}_{1221}^p = {\mathsf{S}}_{2112}^p = {\mathsf{S}}_{2121}^p = {\mathsf{S}}_{2211}^p = A {\rm \pi}\,\frac{{\rm I}_1({\mathsf{B}}_{11}^p)}{2 {\mathsf{B}}_{11}^p}, \end{gather}
\begin{gather}{\mathsf{S}}_{1122}^p = {\mathsf{S}}_{1212}^p = {\mathsf{S}}_{1221}^p = {\mathsf{S}}_{2112}^p = {\mathsf{S}}_{2121}^p = {\mathsf{S}}_{2211}^p = A {\rm \pi}\,\frac{{\rm I}_1({\mathsf{B}}_{11}^p)}{2 {\mathsf{B}}_{11}^p}, \end{gather} \begin{gather}{\mathsf{S}}_{2222}^p= A {\rm \pi}\left[{\rm I}_0({\mathsf{B}}_{11}^p) - \frac{2 {\mathsf{B}}_{11}^p+1}{2 {\mathsf{B}}_{11}^p}\,{\rm I}_1({\mathsf{B}}_{11}^p) \right], \end{gather}
\begin{gather}{\mathsf{S}}_{2222}^p= A {\rm \pi}\left[{\rm I}_0({\mathsf{B}}_{11}^p) - \frac{2 {\mathsf{B}}_{11}^p+1}{2 {\mathsf{B}}_{11}^p}\,{\rm I}_1({\mathsf{B}}_{11}^p) \right], \end{gather}with
 \begin{equation} A = \frac{1}{2 {\rm \pi}\,{\rm I}_0({\mathsf{B}}_{11}^p)}. \end{equation}
\begin{equation} A = \frac{1}{2 {\rm \pi}\,{\rm I}_0({\mathsf{B}}_{11}^p)}. \end{equation}
Rotation of  ${{\mathsf{S}}}^p$ for use in (2.3) is straightforward.
${{\mathsf{S}}}^p$ for use in (2.3) is straightforward.
The immersed object is assumed to have a no slip surface, which provides a velocity boundary condition
 \begin{equation} {\boldsymbol{u}}({\boldsymbol{x}},t) = {\boldsymbol{U}}(t) + {\boldsymbol{\varOmega}}(t) \times {\boldsymbol{r}}, \end{equation}
\begin{equation} {\boldsymbol{u}}({\boldsymbol{x}},t) = {\boldsymbol{U}}(t) + {\boldsymbol{\varOmega}}(t) \times {\boldsymbol{r}}, \end{equation}
with  ${\boldsymbol {U}}$ its translational velocity and
${\boldsymbol {U}}$ its translational velocity and  ${\boldsymbol {\varOmega }} = [0,0,\varOmega ]^{\rm T}$ its angular rotation rate, which is crossed with the vector from its centroid
${\boldsymbol {\varOmega }} = [0,0,\varOmega ]^{\rm T}$ its angular rotation rate, which is crossed with the vector from its centroid  ${\boldsymbol {r}} = [x-x_o,y-y_o,0]^{\rm T}$. For most cases,
${\boldsymbol {r}} = [x-x_o,y-y_o,0]^{\rm T}$. For most cases,  ${\boldsymbol {U}}$ and
${\boldsymbol {U}}$ and  $\varOmega$ are solved in conjunction with the flow equations (2.1) and (2.2) to enforce zero net drag and torque on the surface
$\varOmega$ are solved in conjunction with the flow equations (2.1) and (2.2) to enforce zero net drag and torque on the surface  $S_o$ of the object:
$S_o$ of the object:
 \begin{gather} {\boldsymbol{F}} = \int_{S_o} \left[{-}p {\boldsymbol{\mathsf{I}}} + (\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}) + \alpha {\boldsymbol{\mathsf{D}}}\right]\boldsymbol{\cdot} {\boldsymbol{n}}\,{\rm d}{\boldsymbol{x}} = \boldsymbol{0}, \end{gather}
\begin{gather} {\boldsymbol{F}} = \int_{S_o} \left[{-}p {\boldsymbol{\mathsf{I}}} + (\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}) + \alpha {\boldsymbol{\mathsf{D}}}\right]\boldsymbol{\cdot} {\boldsymbol{n}}\,{\rm d}{\boldsymbol{x}} = \boldsymbol{0}, \end{gather} \begin{gather}T =\int_{S_o} {\boldsymbol{r}} \times\left( \left[{-}p {\boldsymbol{\mathsf{I}}} + (\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}) + \alpha {\boldsymbol{\mathsf{D}}}\right]\boldsymbol{\cdot} {\boldsymbol{n}}\right)\,{\rm d}{\boldsymbol{x}} =0 . \end{gather}
\begin{gather}T =\int_{S_o} {\boldsymbol{r}} \times\left( \left[{-}p {\boldsymbol{\mathsf{I}}} + (\boldsymbol{\nabla} {\boldsymbol{u}} + \boldsymbol{\nabla} {\boldsymbol{u}}^{\rm T}) + \alpha {\boldsymbol{\mathsf{D}}}\right]\boldsymbol{\cdot} {\boldsymbol{n}}\right)\,{\rm d}{\boldsymbol{x}} =0 . \end{gather}
To illuminate mechanisms in specific cases, a kinematic constraint  ${\boldsymbol {v}}\boldsymbol {\cdot }{\boldsymbol {U}}=0$ replaces part of the
${\boldsymbol {v}}\boldsymbol {\cdot }{\boldsymbol {U}}=0$ replaces part of the  ${\boldsymbol {F}} = 0$ constraint. In this case, the combined system is instead solved for
${\boldsymbol {F}} = 0$ constraint. In this case, the combined system is instead solved for  ${\boldsymbol {U}}_\perp$, such that
${\boldsymbol {U}}_\perp$, such that  ${\boldsymbol {v}}\boldsymbol {\cdot }{\boldsymbol {U}}_\perp = 0$, and
${\boldsymbol {v}}\boldsymbol {\cdot }{\boldsymbol {U}}_\perp = 0$, and  $F$, such that
$F$, such that  ${\boldsymbol {F}} = F{\boldsymbol {v}}$ represents an external force resisting motion in the direction of unit vector
${\boldsymbol {F}} = F{\boldsymbol {v}}$ represents an external force resisting motion in the direction of unit vector  ${\boldsymbol {v}}$. Some cases also simply fix the object in place with
${\boldsymbol {v}}$. Some cases also simply fix the object in place with  ${\boldsymbol {U}} = {\boldsymbol {\varOmega }} = \boldsymbol {0}$. The fixed boundary
${\boldsymbol {U}} = {\boldsymbol {\varOmega }} = \boldsymbol {0}$. The fixed boundary  $S_c$ of the container is also no-slip, so
$S_c$ of the container is also no-slip, so  ${\boldsymbol {u}}=\boldsymbol {0}$ on
${\boldsymbol {u}}=\boldsymbol {0}$ on  ${\boldsymbol {x}} \in S_c$. It is assumed that boundaries do not orient the active agents, so
${\boldsymbol {x}} \in S_c$. It is assumed that boundaries do not orient the active agents, so  ${\boldsymbol {n}}\boldsymbol {\cdot }\boldsymbol {\nabla }{\boldsymbol{\mathsf{D}}} = \boldsymbol {0}$ on
${\boldsymbol {n}}\boldsymbol {\cdot }\boldsymbol {\nabla }{\boldsymbol{\mathsf{D}}} = \boldsymbol {0}$ on  ${\boldsymbol {x}} \in (S_o \cup S_c)$.
${\boldsymbol {x}} \in (S_o \cup S_c)$.
2.2. Numerical methods
The momentum balance (2.1) and incompressibility constraint (2.2) are discretized with Lagrange polynomial quadrilateral finite elements of degree  $n$ for the velocity
$n$ for the velocity  ${\boldsymbol {u}}$, and degree
${\boldsymbol {u}}$, and degree  $n-1$ for the pressure
$n-1$ for the pressure  $p$. Similarly,
$p$. Similarly,  ${\boldsymbol{\mathsf{D}}}$ in (2.3) is discretized with degree-
${\boldsymbol{\mathsf{D}}}$ in (2.3) is discretized with degree- $m$ polynomials. The translational advection term
$m$ polynomials. The translational advection term  ${\boldsymbol {u}}\boldsymbol {\cdot } \boldsymbol {\nabla } {\boldsymbol{\mathsf{D}}}$ in (2.3) is incorporated into the time derivative by moving the mesh at the fluid velocity. Specifically, this is done by advecting the degree-
${\boldsymbol {u}}\boldsymbol {\cdot } \boldsymbol {\nabla } {\boldsymbol{\mathsf{D}}}$ in (2.3) is incorporated into the time derivative by moving the mesh at the fluid velocity. Specifically, this is done by advecting the degree- $m$ polynomial function that maps the finite-element mesh
$m$ polynomial function that maps the finite-element mesh  ${\boldsymbol {x}}({\boldsymbol {X}},t)$ to a fixed reference mesh
${\boldsymbol {x}}({\boldsymbol {X}},t)$ to a fixed reference mesh  ${\boldsymbol {X}}$ with the local velocity starting from time
${\boldsymbol {X}}$ with the local velocity starting from time  $t_r$ when they coincide:
$t_r$ when they coincide:
 \begin{equation} \frac{{\rm d} {\boldsymbol{x}}({\boldsymbol{X}},t) }{ {\rm d} t} = {\boldsymbol{u}}({\boldsymbol{x}},t)\ \text{for}\ t \ge t_r, \quad \text{and}\quad {\boldsymbol{x}}({\boldsymbol{X}},t_{r}) = {\boldsymbol{X}}. \end{equation}
\begin{equation} \frac{{\rm d} {\boldsymbol{x}}({\boldsymbol{X}},t) }{ {\rm d} t} = {\boldsymbol{u}}({\boldsymbol{x}},t)\ \text{for}\ t \ge t_r, \quad \text{and}\quad {\boldsymbol{x}}({\boldsymbol{X}},t_{r}) = {\boldsymbol{X}}. \end{equation}
The distortional tensor advection terms ( $\boldsymbol {\nabla } {\boldsymbol {u}}\boldsymbol {\cdot }{\boldsymbol{\mathsf{D}}} + {\boldsymbol{\mathsf{D}}} \boldsymbol {\cdot } \boldsymbol {\nabla }{\boldsymbol {u}}^{\rm T}$), the
$\boldsymbol {\nabla } {\boldsymbol {u}}\boldsymbol {\cdot }{\boldsymbol{\mathsf{D}}} + {\boldsymbol{\mathsf{D}}} \boldsymbol {\cdot } \boldsymbol {\nabla }{\boldsymbol {u}}^{\rm T}$), the  ${\boldsymbol{\mathsf{S}}}$ alignment term, and the
${\boldsymbol{\mathsf{S}}}$ alignment term, and the  $d_R$ rotational relaxation terms are evaluated on the distorted
$d_R$ rotational relaxation terms are evaluated on the distorted  ${\boldsymbol {x}}$ mesh and time integrated with a second-order backward differencing scheme. The
${\boldsymbol {x}}$ mesh and time integrated with a second-order backward differencing scheme. The  $d_T$ spatial diffusion term is time integrated with a first-order forward difference, which yields an implicit system that is solved in conjunction with the mass-matrix inversion.
$d_T$ spatial diffusion term is time integrated with a first-order forward difference, which yields an implicit system that is solved in conjunction with the mass-matrix inversion.
Overall, this moving mesh approach is selected primarily to accommodate the motion of the immersed object. Since the mesh distorts significantly in time, the reference  ${\boldsymbol {X}}$ mesh is reconstructed periodically for the current location of the object. The solution at the current and recent time steps is then projected to the new mesh using the same degree-
${\boldsymbol {X}}$ mesh is reconstructed periodically for the current location of the object. The solution at the current and recent time steps is then projected to the new mesh using the same degree- $m$ weak-form discretization. This is done every
$m$ weak-form discretization. This is done every  $N_r=10$ time steps, which also sets a new
$N_r=10$ time steps, which also sets a new  $t_r$ in (2.15). To impose dynamic constraints, such as (2.13) and (2.14), or the similar
$t_r$ in (2.15). To impose dynamic constraints, such as (2.13) and (2.14), or the similar  ${\boldsymbol {v}}\boldsymbol {\cdot }{\boldsymbol {U}}=0$ kinematic constraint, the linearity of (2.1) and (2.2) is used to solve for the
${\boldsymbol {v}}\boldsymbol {\cdot }{\boldsymbol {U}}=0$ kinematic constraint, the linearity of (2.1) and (2.2) is used to solve for the  ${\boldsymbol {U}}$ and
${\boldsymbol {U}}$ and  $\varOmega$ that enforce the boundary condition (2.12). The scheme was implemented with the deal.II finite-element libraries (Arndt et al. Reference Arndt2022).
$\varOmega$ that enforce the boundary condition (2.12). The scheme was implemented with the deal.II finite-element libraries (Arndt et al. Reference Arndt2022).
For most simulations,  $m = n = 3$, and the total number of degrees of freedom for
$m = n = 3$, and the total number of degrees of freedom for  ${\boldsymbol {u}}$,
${\boldsymbol {u}}$,  $p$ and
$p$ and  ${\boldsymbol{\mathsf{D}}}$ ranged from 1460 for the weakest activity case (
${\boldsymbol{\mathsf{D}}}$ ranged from 1460 for the weakest activity case ( $\alpha = -0.6$) to 13 840 for the most active case (
$\alpha = -0.6$) to 13 840 for the most active case ( $\alpha = -80$). Time steps and simulation times varied significantly based on the stability restrictions, resolution and phenomenology of the different cases; some simulations were run for over
$\alpha = -80$). Time steps and simulation times varied significantly based on the stability restrictions, resolution and phenomenology of the different cases; some simulations were run for over  $10^6$ time steps to accumulate statistics. Most cases were run with multiple resolutions and time steps to confirm discretization independence.
$10^6$ time steps to accumulate statistics. Most cases were run with multiple resolutions and time steps to confirm discretization independence.
2.3. Flow configuration
Figure 1(a) shows the configuration. The immersed object is a circle of radius  $a=1$ (in most cases) in a larger circular container of radius
$a=1$ (in most cases) in a larger circular container of radius  $R=2$. Except when noted, the circle is initialized concentric with the container, with
$R=2$. Except when noted, the circle is initialized concentric with the container, with  ${\boldsymbol {x}}_o(0) = (0,0)$. Figure 1(b) shows an example distorted mesh just prior to projection onto a new one. Reference
${\boldsymbol {x}}_o(0) = (0,0)$. Figure 1(b) shows an example distorted mesh just prior to projection onto a new one. Reference  ${\boldsymbol {X}}$ meshes are constructed in a straightforward way from circles and straight lines between the two boundaries. The suspension is assumed to be initially isotropic:
${\boldsymbol {X}}$ meshes are constructed in a straightforward way from circles and straight lines between the two boundaries. The suspension is assumed to be initially isotropic:  ${\boldsymbol{\mathsf{D}}}({\boldsymbol {x}},0) = {\boldsymbol{\mathsf{I}}}/2$. Animated visualizations of the flows are shown in supplementary movies 1–10 for
${\boldsymbol{\mathsf{D}}}({\boldsymbol {x}},0) = {\boldsymbol{\mathsf{I}}}/2$. Animated visualizations of the flows are shown in supplementary movies 1–10 for  $\alpha = -0.625$,
$\alpha = -0.625$,  $-1$,
$-1$,  $-2.5$,
$-2.5$,  $-5.0$,
$-5.0$,  $-10$,
$-10$,  $-20$,
$-20$,  $-40$ (for
$-40$ (for  $a = 0.5$,
$a = 0.5$,  $a=1.0$ and
$a=1.0$ and  $a = 1.5$), and
$a = 1.5$), and  $-80$, respectively.
$-80$, respectively.
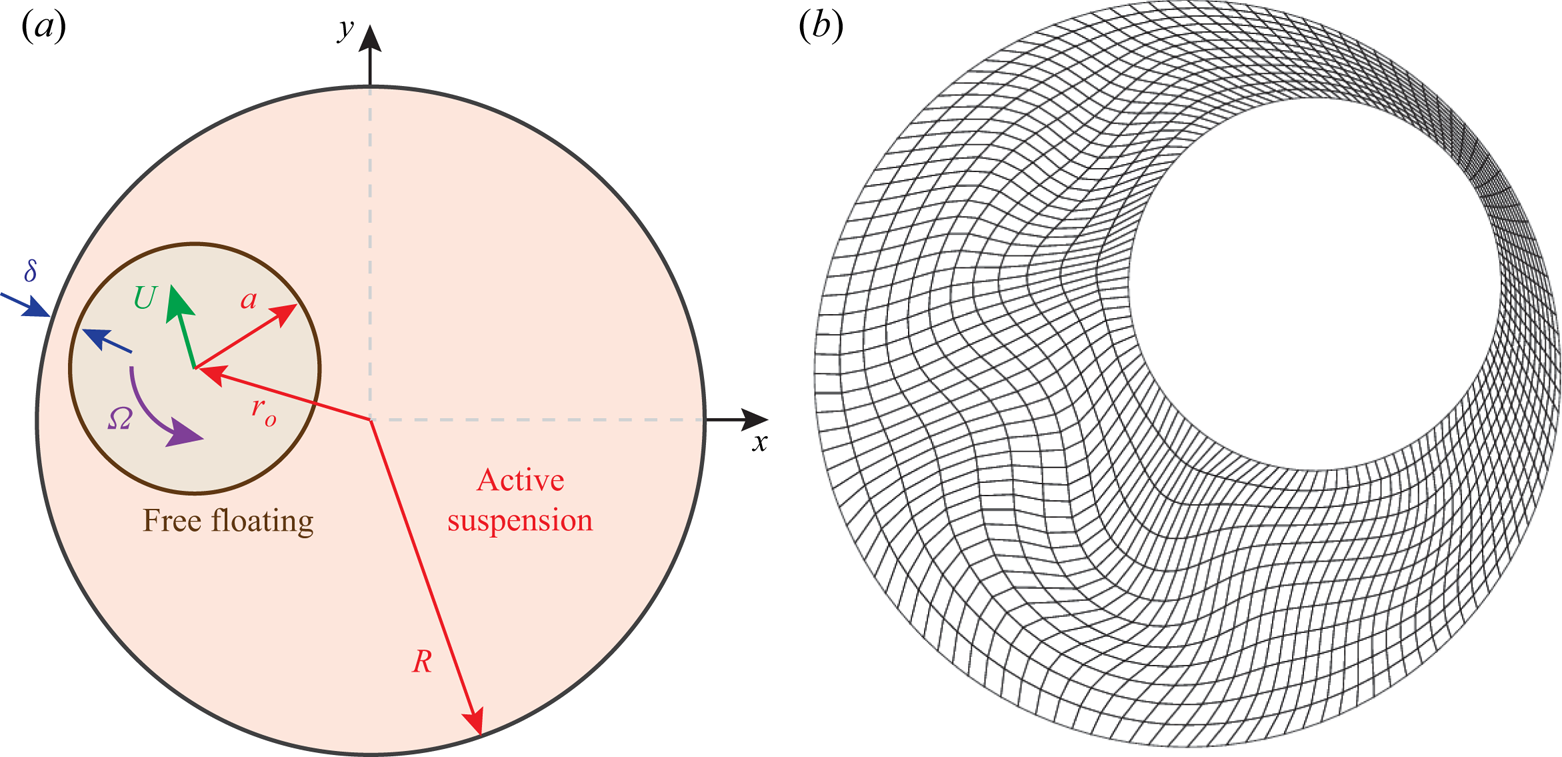
Figure 1. (a) Configuration schematic. (b) An example mapped mesh prior to remeshing for an  $a = 1$,
$a = 1$,  $R = 2$,
$R = 2$,  $\alpha = -5.0$ case with 160 quadrilateral cells and 5400 total degrees of freedom for a
$\alpha = -5.0$ case with 160 quadrilateral cells and 5400 total degrees of freedom for a  $n=m=3$ discretization. For this and all visualizations, solutions are sampled uniformly within each element from the basis functions.
$n=m=3$ discretization. For this and all visualizations, solutions are sampled uniformly within each element from the basis functions.
When  $\alpha$ is such that the fluid is unstable for the given geometry, the flow evolves rapidly from any small perturbation. None of the results were found to be sensitive to the perturbation details, aside from setting the rotation direction in cases for which the flow is so regular that the rotation direction does not change. The
$\alpha$ is such that the fluid is unstable for the given geometry, the flow evolves rapidly from any small perturbation. None of the results were found to be sensitive to the perturbation details, aside from setting the rotation direction in cases for which the flow is so regular that the rotation direction does not change. The  $\alpha$ stability limit for
$\alpha$ stability limit for  $R=2$ with
$R=2$ with  $d_T = d_R = 0.05$ without the free-floating object was found to be
$d_T = d_R = 0.05$ without the free-floating object was found to be  $\alpha _c \approx -0.63$, matching previous simulations and stability analysis (Woodhouse & Goldstein Reference Woodhouse and Goldstein2012; Gao et al. Reference Gao, Betterton, Jhang and Shelley2017). In a corresponding fixed-boundary annulus container (
$\alpha _c \approx -0.63$, matching previous simulations and stability analysis (Woodhouse & Goldstein Reference Woodhouse and Goldstein2012; Gao et al. Reference Gao, Betterton, Jhang and Shelley2017). In a corresponding fixed-boundary annulus container ( ${\boldsymbol {x}}_o = (0,0)$,
${\boldsymbol {x}}_o = (0,0)$,  $a=1$ and
$a=1$ and  $R=2$, with
$R=2$, with  ${\boldsymbol {U}} = 0$ and
${\boldsymbol {U}} = 0$ and  $\varOmega = 0$),
$\varOmega = 0$),  $\alpha = -1.23$ was unstable to a circulating flow, while
$\alpha = -1.23$ was unstable to a circulating flow, while  $\alpha = -1.22$ was stable, matching the simulations and analysis of Chen et al. (Reference Chen, Gao and Gao2018). The transitions with
$\alpha = -1.22$ was stable, matching the simulations and analysis of Chen et al. (Reference Chen, Gao and Gao2018). The transitions with  $\alpha$ to propagating wave solutions and chaotic flow for the annular case also match.
$\alpha$ to propagating wave solutions and chaotic flow for the annular case also match.
3. Weak activity ( $-1\le \alpha \le 0$)
$-1\le \alpha \le 0$)

3.1. Suspension instability
Although the initial geometry with  $|{\boldsymbol {x}}_o| = r_o=0$ matches the annulus of Chen et al. (Reference Chen, Gao and Gao2018), the mobility of the inner circle is expected to facilitate instability for weaker activity than their fixed-wall limit
$|{\boldsymbol {x}}_o| = r_o=0$ matches the annulus of Chen et al. (Reference Chen, Gao and Gao2018), the mobility of the inner circle is expected to facilitate instability for weaker activity than their fixed-wall limit  $\alpha _c \approx -1.23$. In the fixed-wall case, an axisymmetric circulating flow is observed for small unstable
$\alpha _c \approx -1.23$. In the fixed-wall case, an axisymmetric circulating flow is observed for small unstable  $|\alpha |$, so the circular Couette-like flow in figure 2 is as expected, and is observed for
$|\alpha |$, so the circular Couette-like flow in figure 2 is as expected, and is observed for  $\alpha \lesssim -0.6$. The
$\alpha \lesssim -0.6$. The  $t = 1500$ time shown is after the activity of the suspension instability has plateaued but before the geometric instability considered in the next subsection becomes pronounced. At this time, the circular object and container are still nearly concentric with
$t = 1500$ time shown is after the activity of the suspension instability has plateaued but before the geometric instability considered in the next subsection becomes pronounced. At this time, the circular object and container are still nearly concentric with  $r_o = 0.001$, having started at
$r_o = 0.001$, having started at  $r_o=0$. The circle rotates at
$r_o=0$. The circle rotates at  $|\varOmega | = 0.017$, with the sign of
$|\varOmega | = 0.017$, with the sign of  $\varOmega$ depending on the specifics of the initial perturbation. Of course, this rate is faster for larger
$\varOmega$ depending on the specifics of the initial perturbation. Of course, this rate is faster for larger  $|\alpha |$:
$|\alpha |$:  $|\varOmega | = 0.026$ for
$|\varOmega | = 0.026$ for  $\alpha = -0.625$,
$\alpha = -0.625$,  $|\varOmega | = 0.052$ for
$|\varOmega | = 0.052$ for  $\alpha = -0.75$, and
$\alpha = -0.75$, and  $|\varOmega | = 0.087$ for
$|\varOmega | = 0.087$ for  $\alpha = -1$. Perturbations decay for
$\alpha = -1$. Perturbations decay for  $\alpha \ge -0.575$. Decreasing the rotational mobility of the circle by adding a resistance torque
$\alpha \ge -0.575$. Decreasing the rotational mobility of the circle by adding a resistance torque  $T_r = - c_\tau \varOmega$ increases the
$T_r = - c_\tau \varOmega$ increases the  $|\alpha |$ suspension stability threshold. For
$|\alpha |$ suspension stability threshold. For  $\alpha = -1.0$,
$\alpha = -1.0$,  $c_\tau = 8.5$ is stable, whereas
$c_\tau = 8.5$ is stable, whereas  $c_\tau = 8.0$ only slows rotation to
$c_\tau = 8.0$ only slows rotation to  $|\varOmega | = 0.043$.
$|\varOmega | = 0.043$.

Figure 2. Fully developed velocity profiles and streamfunction  $\psi$ with
$\psi$ with  $\Delta \psi = 0.0011$ contour spacing for
$\Delta \psi = 0.0011$ contour spacing for  $\alpha = -0.6$ for the force- and torque-free immersed circle.
$\alpha = -0.6$ for the force- and torque-free immersed circle.
3.2. Geometric instability
The rotating axisymmetric low- $|\alpha |$ case visualized in figure 2 is not itself stable, although the subsequent geometric instability develops much more slowly than that of the suspension itself. Figure 3 shows the long-time evolution for the
$|\alpha |$ case visualized in figure 2 is not itself stable, although the subsequent geometric instability develops much more slowly than that of the suspension itself. Figure 3 shows the long-time evolution for the  $\alpha = -1$ case. The nearly axisymmetric flow is established with its peak
$\alpha = -1$ case. The nearly axisymmetric flow is established with its peak  $|\varOmega |$ by
$|\varOmega |$ by  $t \approx 300$, but the circle then migrates from
$t \approx 300$, but the circle then migrates from  $r_o \approx 0$ to
$r_o \approx 0$ to  $r_o\approx 0.986$ (
$r_o\approx 0.986$ ( $\delta = 0.014$ from contact) for
$\delta = 0.014$ from contact) for  $t \gtrsim 5000$, as seen in figure 3(a). Any small perturbation leads to the same expanding spiral seen in figure 3(b). The rate of migration and precession is first slow, then more rapid, before it slows again near the container wall. The migration, and indeed all flow, stops for
$t \gtrsim 5000$, as seen in figure 3(a). Any small perturbation leads to the same expanding spiral seen in figure 3(b). The rate of migration and precession is first slow, then more rapid, before it slows again near the container wall. The migration, and indeed all flow, stops for  $t > 5000$, when the wall separation distance is
$t > 5000$, when the wall separation distance is  $\delta = 0.014$. Details of the approach to the container wall and the cessation of flow are discussed in § 3.3, after the mechanism of the migration is considered here.
$\delta = 0.014$. Details of the approach to the container wall and the cessation of flow are discussed in § 3.3, after the mechanism of the migration is considered here.

Figure 3. Migration from centre point  ${\boldsymbol {x}}_o(t) = (0,0)$,
${\boldsymbol {x}}_o(t) = (0,0)$,  $r_o(0) = 0$ outwards for
$r_o(0) = 0$ outwards for  $\alpha = -1.0$: (a) radial distance in log (red) and linear (blue) scales, and (b) the precession over this same time period. The dotted circle in (b) indicates the radius of contact. The dashed green line show a case that is constrained with standoff
$\alpha = -1.0$: (a) radial distance in log (red) and linear (blue) scales, and (b) the precession over this same time period. The dotted circle in (b) indicates the radius of contact. The dashed green line show a case that is constrained with standoff  $\delta \ge 0.05$. The black dots along the curve in (b) are spaced equally in time, with
$\delta \ge 0.05$. The black dots along the curve in (b) are spaced equally in time, with  $\Delta t = 25$. See also an animated visualization in supplementary movie 2.
$\Delta t = 25$. See also an animated visualization in supplementary movie 2.
Figures 4(a–f) show how a small displacement from symmetric leads to higher strain rates in the fluid in the now narrower region between the object and the closer container wall, which in turn strengthens  ${\boldsymbol{\mathsf{D}}}$, both its wall normal
${\boldsymbol{\mathsf{D}}}$, both its wall normal  ${\mathsf{D}}_{nn}$ and tangential
${\mathsf{D}}_{nn}$ and tangential  ${\mathsf{D}}_{nt}$ components. As in a planar Couette configuration, there is an active shear stress component, which is sympathetic with the shear strain rate, and a tensile normal stress (Saintillan Reference Saintillan2018). The stronger
${\mathsf{D}}_{nt}$ components. As in a planar Couette configuration, there is an active shear stress component, which is sympathetic with the shear strain rate, and a tensile normal stress (Saintillan Reference Saintillan2018). The stronger  ${\mathsf{D}}_{nt}$ stress in the narrow side versus the wide side drives the precession, while the corresponding imbalanced
${\mathsf{D}}_{nt}$ stress in the narrow side versus the wide side drives the precession, while the corresponding imbalanced  ${\mathsf{D}}_{nn}$ across the object pulls it towards the nearer container wall. Together, these yield the spiral pattern of figure 3(b). The mismatched
${\mathsf{D}}_{nn}$ across the object pulls it towards the nearer container wall. Together, these yield the spiral pattern of figure 3(b). The mismatched  ${\mathsf{D}}_{nt}$ also drives a rotation of the circle that is counter to a rolling motion, which in conjunction with the precession also increases the strain rate in the narrow side relative to the wider side. Exponential growth of the displacement persists until
${\mathsf{D}}_{nt}$ also drives a rotation of the circle that is counter to a rolling motion, which in conjunction with the precession also increases the strain rate in the narrow side relative to the wider side. Exponential growth of the displacement persists until  $t\approx 1700$ when
$t\approx 1700$ when  $r_o \approx 0.25R$ (figure 3a), which corresponds approximately to the point at which the streamlines in the frame of the precessing circle show a distinct recirculation in the larger space (figure 4c). In the final frame, figure 4( f), where
$r_o \approx 0.25R$ (figure 3a), which corresponds approximately to the point at which the streamlines in the frame of the precessing circle show a distinct recirculation in the larger space (figure 4c). In the final frame, figure 4( f), where  $r_o=0.985$ (
$r_o=0.985$ ( $\delta = 0.015$), the flow is nearly stopped. All flow stops at
$\delta = 0.015$), the flow is nearly stopped. All flow stops at  $\delta = 0.014$.
$\delta = 0.014$.
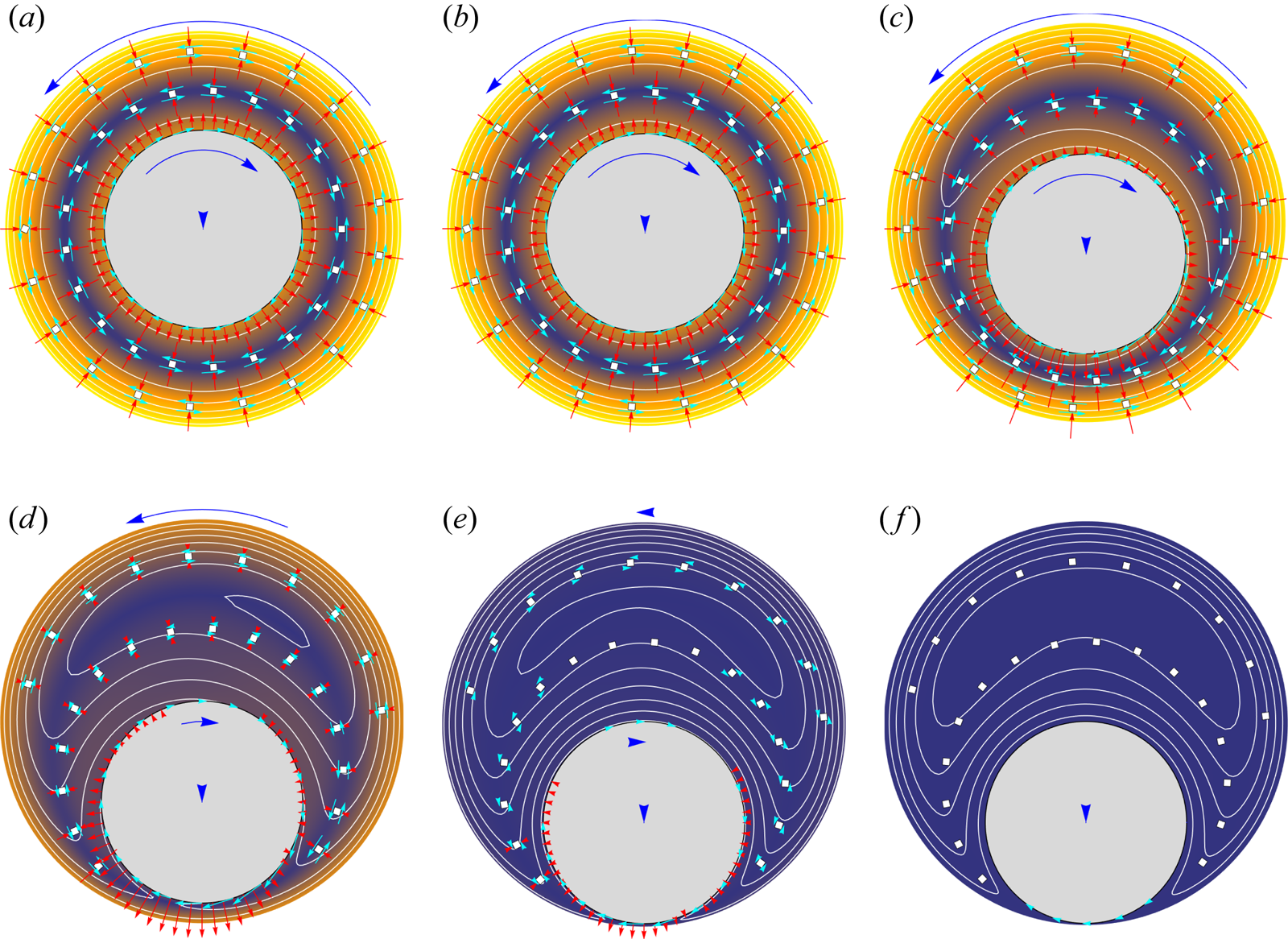
Figure 4. (a–f) Migration towards the wall for  $\alpha = -1$ for the times (a)
$\alpha = -1$ for the times (a)  $t=1000$, (b)
$t=1000$, (b)  $t=1500$, (c)
$t=1500$, (c)  $t=1700$, (d)
$t=1700$, (d)  $t=2000$, (e)
$t=2000$, (e)  $t=2200$, ( f)
$t=2200$, ( f)  $t=7000$. The reference frame is rotating about
$t=7000$. The reference frame is rotating about  ${\boldsymbol {x}} = (0,0)$ with the precession rate, with blue arrows visualizing the velocity of the immersed circle and the container in this frame. The red arrows show the normal component
${\boldsymbol {x}} = (0,0)$ with the precession rate, with blue arrows visualizing the velocity of the immersed circle and the container in this frame. The red arrows show the normal component  ${\mathsf{D}}_{nn}$ of
${\mathsf{D}}_{nn}$ of  ${\boldsymbol{\mathsf{D}}}$ directed towards the immersed object and outer wall, with its specific angle linearly interpolated between the closest points on each circle. The cyan arrows visualize the shear component
${\boldsymbol{\mathsf{D}}}$ directed towards the immersed object and outer wall, with its specific angle linearly interpolated between the closest points on each circle. The cyan arrows visualize the shear component  ${\mathsf{D}}_{nt}$ in this same orientation. The white contours show the streamfunction in this rotating frame, and the same colour levels visualize the time-decreasing velocity magnitude
${\mathsf{D}}_{nt}$ in this same orientation. The white contours show the streamfunction in this rotating frame, and the same colour levels visualize the time-decreasing velocity magnitude  $|{\boldsymbol {u}}|$ in this same frame.
$|{\boldsymbol {u}}|$ in this same frame.
3.3. Near-wall behaviour
As it approaches, the object's motion towards the container wall is increasingly opposed by the usual large normal lubrication resistance. However, active shear stress in the narrowing gap continues to cause counter-rolling rotation and continued precession along the container wall. The deviatoric components of  $\alpha {\boldsymbol{\mathsf{D}}}$ on the surfaces in this narrow lubrication-like gap are plotted in figure 5, rotated into local surface coordinates. In the narrowest region, the wall-normal components are nearly the same across the gap, consistent with the lubrication limit. They hold the object near the wall, and for
$\alpha {\boldsymbol{\mathsf{D}}}$ on the surfaces in this narrow lubrication-like gap are plotted in figure 5, rotated into local surface coordinates. In the narrowest region, the wall-normal components are nearly the same across the gap, consistent with the lubrication limit. They hold the object near the wall, and for  $\alpha = -1$ slowly pull it closer. When a
$\alpha = -1$ slowly pull it closer. When a  $\delta _c = 0.05$ standoff constraint is imposed, they hold it against this constraint as it precesses. Upstream and downstream of the narrowest gap, symmetry is broken, with wall-normal stresses there significantly different. By
$\delta _c = 0.05$ standoff constraint is imposed, they hold it against this constraint as it precesses. Upstream and downstream of the narrowest gap, symmetry is broken, with wall-normal stresses there significantly different. By  $\gamma = \pm {\rm \pi}/4$, they are compressive behind the object and tensile ahead of it, promoting the precession and thus further increasing shear strain rate in the smallest gap.
$\gamma = \pm {\rm \pi}/4$, they are compressive behind the object and tensile ahead of it, promoting the precession and thus further increasing shear strain rate in the smallest gap.

Figure 5. Deviatoric active stress components  $\alpha {\boldsymbol{\mathsf{D}}}' = \alpha ({\boldsymbol{\mathsf{D}}} - {\boldsymbol{\mathsf{I}}}/2)$ of the active suspension along the container and object surfaces as indicated for
$\alpha {\boldsymbol{\mathsf{D}}}' = \alpha ({\boldsymbol{\mathsf{D}}} - {\boldsymbol{\mathsf{I}}}/2)$ of the active suspension along the container and object surfaces as indicated for  $\alpha = -1.0$. They are rotated into local normal and tangential coordinates
$\alpha = -1.0$. They are rotated into local normal and tangential coordinates  $(n,t)$. The circle's rotation and precession are both clockwise, so negative
$(n,t)$. The circle's rotation and precession are both clockwise, so negative  $\beta$ and
$\beta$ and  $\gamma$ are ahead of its motion.
$\gamma$ are ahead of its motion.
One notable feature of figure 5 is that the active shear stresses are most significant in the lubrication layer near the wall of the container, activated there by the relatively high local strain rate. Two-thirds (65.6 %) of the net active-stress torque on the cylinder is on the lowest quarter of the circle ( $|\gamma | \le {\rm \pi}/4$), and 89 % is on its lower half (
$|\gamma | \le {\rm \pi}/4$), and 89 % is on its lower half ( $|\gamma | < {\rm \pi}/2$). Yet for such weak activity, even in these same regions, the flow remains nearly identical to a constant viscosity Newtonian fluid driven by the motion of the circle. In the frame that fixes the precession angle, the streamfunction
$|\gamma | < {\rm \pi}/2$). Yet for such weak activity, even in these same regions, the flow remains nearly identical to a constant viscosity Newtonian fluid driven by the motion of the circle. In the frame that fixes the precession angle, the streamfunction  $\psi$ flow pattern (with
$\psi$ flow pattern (with  ${\boldsymbol {u}} = [\psi _y,-\psi _x]^{\rm T}$) is compared with the exact Stokes flow solution (Wannier Reference Wannier1950) in figure 6(a). There is only a slight difference in the velocity profile in the region of highest strain rate (figure 6c), and almost no difference at
${\boldsymbol {u}} = [\psi _y,-\psi _x]^{\rm T}$) is compared with the exact Stokes flow solution (Wannier Reference Wannier1950) in figure 6(a). There is only a slight difference in the velocity profile in the region of highest strain rate (figure 6c), and almost no difference at  $|\gamma | = \pm {\rm \pi}/2$ (figure 6b). This can be anticipated: the flow is nearly Stokesian for low activity (
$|\gamma | = \pm {\rm \pi}/2$ (figure 6b). This can be anticipated: the flow is nearly Stokesian for low activity ( $|\alpha |\to 0$), though the viscosity might still depend on
$|\alpha |\to 0$), though the viscosity might still depend on  $\alpha$ (or, similarly, suspension concentration), as has been observed in suspensions (López et al. Reference López, Gachelin, Douarche, Auradou and Clément2015). In addition, the mobility of the circle is required to (barely) maintain the flow, and the minimum dissipation flow must be a Stokes flow. However, the activity, viewed as components of
$\alpha$ (or, similarly, suspension concentration), as has been observed in suspensions (López et al. Reference López, Gachelin, Douarche, Auradou and Clément2015). In addition, the mobility of the circle is required to (barely) maintain the flow, and the minimum dissipation flow must be a Stokes flow. However, the activity, viewed as components of  ${\boldsymbol{\mathsf{D}}}$, is not nearly so symmetric as the velocity field. (The margination process itself also obviously breaks the symmetry of a Stokes flow, although that is slower still than the velocities associated with precession and rotation.)
${\boldsymbol{\mathsf{D}}}$, is not nearly so symmetric as the velocity field. (The margination process itself also obviously breaks the symmetry of a Stokes flow, although that is slower still than the velocities associated with precession and rotation.)

Figure 6. (a) Streamfunction contours spaced by  $\Delta \psi = 0.0005$ for
$\Delta \psi = 0.0005$ for  $\alpha = -1$, comparing the active suspension (red) with the exact Newtonian fluid Stokes flow solution (blue) for the same boundary velocities in a frame that tracks the object precession at fixed standoff
$\alpha = -1$, comparing the active suspension (red) with the exact Newtonian fluid Stokes flow solution (blue) for the same boundary velocities in a frame that tracks the object precession at fixed standoff  $\delta _c = 0.05$. The undetermined constant in
$\delta _c = 0.05$. The undetermined constant in  $\psi$ is adjusted so that the contours align in the lower left region of highest curvature. The straight lines in (a) indicate where velocity profiles are compared with Stokes flow in (b,c), with the solid black curves showing the corresponding Stokes flow solution.
$\psi$ is adjusted so that the contours align in the lower left region of highest curvature. The straight lines in (a) indicate where velocity profiles are compared with Stokes flow in (b,c), with the solid black curves showing the corresponding Stokes flow solution.
Despite the flow pattern nearly matching that of a Newtonian fluid, applying lubrication theory is hindered by a lack of specificity in boundary conditions at either end of the nominal gap. For example, figure 5 shows that  ${\mathsf{D}}_{nt}$ changes continuously and significantly over at least
${\mathsf{D}}_{nt}$ changes continuously and significantly over at least  $-{\rm \pi} /2 < \gamma < {\rm \pi}/2$, well beyond where the lubrication limit can be expected to be accurate. However, the overall behaviour does suggest that lubrication theory might afford a more useful description for still smaller gaps or other geometries with more extensive narrow regions than this circle-in-circle configuration. Of course, if contact is truly close, then the very character of the suspension must also be questioned, which is revisited in § 6. For these reasons, we defer any further analysis of contact.
$-{\rm \pi} /2 < \gamma < {\rm \pi}/2$, well beyond where the lubrication limit can be expected to be accurate. However, the overall behaviour does suggest that lubrication theory might afford a more useful description for still smaller gaps or other geometries with more extensive narrow regions than this circle-in-circle configuration. Of course, if contact is truly close, then the very character of the suspension must also be questioned, which is revisited in § 6. For these reasons, we defer any further analysis of contact.
For the small  $|\alpha |$ cases considered thus far, immobilizing the object at any
$|\alpha |$ cases considered thus far, immobilizing the object at any  $r_o$ stabilizes the suspension, which confirms that the entire flow is linked intimately to the mobility of the object. We can estimate the viscous resistance that the object must overcome to remain rotating (and hence slowly marginating) based on the Newtonian fluid limit. The required torque to maintain rotation without suspension activity (
$r_o$ stabilizes the suspension, which confirms that the entire flow is linked intimately to the mobility of the object. We can estimate the viscous resistance that the object must overcome to remain rotating (and hence slowly marginating) based on the Newtonian fluid limit. The required torque to maintain rotation without suspension activity ( $\alpha =0$) increases rapidly near the point of contact. Assuming that the angular precession rate equals the angular rotation rate of the object, it increases by only a factor 1.14 from
$\alpha =0$) increases rapidly near the point of contact. Assuming that the angular precession rate equals the angular rotation rate of the object, it increases by only a factor 1.14 from  $r_o=0$ to
$r_o=0$ to  $0.8$, but doubles by
$0.8$, but doubles by  $r_o = 0.956$, and quadruples by
$r_o = 0.956$, and quadruples by  $r_o = 0.990$. It follows that weaker activity, or other external resistance on the object, should lead to arrest at smaller
$r_o = 0.990$. It follows that weaker activity, or other external resistance on the object, should lead to arrest at smaller  $r_o$. For
$r_o$. For  $\alpha = -0.75$, the flow indeed ceases at
$\alpha = -0.75$, the flow indeed ceases at  $r_o = 0.949$ (
$r_o = 0.949$ ( $\delta = 0.051$), rather than the value
$\delta = 0.051$), rather than the value  $r_o = 0.986$ (
$r_o = 0.986$ ( $\delta = 0.014$) for
$\delta = 0.014$) for  $\alpha = -1$. For
$\alpha = -1$. For  $\alpha = -0.625$, which is near the limit of any fluid instability for this configuration, it stops at
$\alpha = -0.625$, which is near the limit of any fluid instability for this configuration, it stops at  $r_o = 0.80$, after following a similar spiral trajectory (figure 7). In this case, the migration rate is smaller relative to the precession rate, leading to a more tightly spaced spiral than for
$r_o = 0.80$, after following a similar spiral trajectory (figure 7). In this case, the migration rate is smaller relative to the precession rate, leading to a more tightly spaced spiral than for  $\alpha = -1$ (figure 3). When a rotational resistance torque
$\alpha = -1$ (figure 3). When a rotational resistance torque  $T_r = -8\varOmega$ is added for
$T_r = -8\varOmega$ is added for  $\alpha = -1$, as discussed in § 3.1, the additional dissipation arrests the circle further from the container wall at
$\alpha = -1$, as discussed in § 3.1, the additional dissipation arrests the circle further from the container wall at  $\delta = 0.020$.
$\delta = 0.020$.

Figure 7. Migration from centre point  ${\boldsymbol {x}}_o(0) = (0,0)$,
${\boldsymbol {x}}_o(0) = (0,0)$,  $r_o(0) = 0$ outwards for
$r_o(0) = 0$ outwards for  $\alpha = -0.625$: (a) radial distance in log (light blue) and linear (dark blue) scales, and (b) the trajectory over this same time period. The dotted circle in (b) indicates the radius of contact. The black dots on the trajectory are spaced equally in time, with
$\alpha = -0.625$: (a) radial distance in log (light blue) and linear (dark blue) scales, and (b) the trajectory over this same time period. The dotted circle in (b) indicates the radius of contact. The black dots on the trajectory are spaced equally in time, with  $\Delta t = 200$. See also the animated visualization in supplementary movie 1.
$\Delta t = 200$. See also the animated visualization in supplementary movie 1.
The dependence of suspension instability on the mobility of the object introduces the question of what changes for activity that is self-sustaining independently of the mobility of the circle. This is the case for  $\alpha \le -10$ in the next section.
$\alpha \le -10$ in the next section.
4. Strong activity ($-80 \le \alpha \le -10$)

Figure 8 shows the apparently chaotic trajectory of the same  $a=1$ circle in a
$a=1$ circle in a  $R = 2$ container, now for
$R = 2$ container, now for  $\alpha =-20$. For the course of this simulation, or any similar simulation for
$\alpha =-20$. For the course of this simulation, or any similar simulation for  $\alpha \lesssim -10$, the object never approaches closer than
$\alpha \lesssim -10$, the object never approaches closer than  $\delta = 0.1$ to the wall, and rarely approaches even this close. Figure 9 quantifies this along with the rotation rate of the circle with joint probability distributions. For
$\delta = 0.1$ to the wall, and rarely approaches even this close. Figure 9 quantifies this along with the rotation rate of the circle with joint probability distributions. For  $\alpha = -10$, it is most likely rotating slowly and at a relatively large
$\alpha = -10$, it is most likely rotating slowly and at a relatively large  $r_o \approx 0.7$ (
$r_o \approx 0.7$ ( $r_o = 1$ would be contact). With stronger activity, the circle is increasingly likely to be closer to the centre of the container at
$r_o = 1$ would be contact). With stronger activity, the circle is increasingly likely to be closer to the centre of the container at  $r_o=0$, and it experiences a broader range of rotation rates
$r_o=0$, and it experiences a broader range of rotation rates  $\varOmega$ (figures 9a,b,c,e). The width of the
$\varOmega$ (figures 9a,b,c,e). The width of the  $\varOmega$ distribution scales approximately with
$\varOmega$ distribution scales approximately with  $\alpha$. None of the distributions is simple, either in
$\alpha$. None of the distributions is simple, either in  $r_o$ or in
$r_o$ or in  $\varOmega$, suggesting that the dynamics of this configuration, with its finite-sized object, is too complex to represent as a simple statistical process. Analysing fluctuation statistics to infer useful transport properties would be challenging.
$\varOmega$, suggesting that the dynamics of this configuration, with its finite-sized object, is too complex to represent as a simple statistical process. Analysing fluctuation statistics to infer useful transport properties would be challenging.

Figure 8. Trajectory from  ${\boldsymbol {x}}_o(0) = (0,0)$,
${\boldsymbol {x}}_o(0) = (0,0)$,  $r_o(0) = 0$ for
$r_o(0) = 0$ for  $\alpha = -20$: (a) radial distance from the container centre, and (b) the trajectory over this same time period. The visible portions of the dotted circle in (b) indicate the radius that would correspond to contact. The same colour pattern tracks evolution in time in both (a) and (b).
$\alpha = -20$: (a) radial distance from the container centre, and (b) the trajectory over this same time period. The visible portions of the dotted circle in (b) indicate the radius that would correspond to contact. The same colour pattern tracks evolution in time in both (a) and (b).

Figure 9. Joint probability density functions (p.d.f.s) of radial position  $r_o$ and angular rotation rate
$r_o$ and angular rotation rate  $\varOmega$ for: (a)
$\varOmega$ for: (a)  $\alpha = -10$ (and
$\alpha = -10$ (and  $-5$),
$-5$),  $a = 1$; (b)
$a = 1$; (b)  $\alpha =-20$,
$\alpha =-20$,  $a = 1$; (c)
$a = 1$; (c)  $\alpha =-80$,
$\alpha =-80$,  $a = 1$; (d)
$a = 1$; (d)  $\alpha =-40$,
$\alpha =-40$,  $a = 0.5$; (e)
$a = 0.5$; (e)  $\alpha =-40$,
$\alpha =-40$,  $a = 1$; ( f)
$a = 1$; ( f)  $\alpha =-40$,
$\alpha =-40$,  $a = 1.5$. In (a), also shown in orange is the corresponding narrow p.d.f. for the
$a = 1.5$. In (a), also shown in orange is the corresponding narrow p.d.f. for the  $\alpha =-5$ case, which follows a relatively deterministic path (see § 5). Note the changing vertical scale for
$\alpha =-5$ case, which follows a relatively deterministic path (see § 5). Note the changing vertical scale for  $r_o$ for the larger and smaller radius circle cases (d, f). Aside from the
$r_o$ for the larger and smaller radius circle cases (d, f). Aside from the  $\alpha =-5$ inset in (a), all cases were observed to change rotation sense multiple times and were thus averaged for
$\alpha =-5$ inset in (a), all cases were observed to change rotation sense multiple times and were thus averaged for  $\pm \varOmega$ symmetry. Animated visualizations of these cases are available in supplementary movies 4–10.
$\pm \varOmega$ symmetry. Animated visualizations of these cases are available in supplementary movies 4–10.
The dependence on the radius of the free-floating circle is a striking example of geometry-dependent statistics. Figures 9(d,e, f) compare the  $r_o$–
$r_o$– $\varOmega$ joint probability distributions for
$\varOmega$ joint probability distributions for  $\alpha = -40$ and
$\alpha = -40$ and  $a = 0.5$,
$a = 0.5$,  $1$ and
$1$ and  $1.5$. The small
$1.5$. The small  $a=0.5$ circle is the closest to following a simple random-walk-like process, though only in some regions. For
$a=0.5$ circle is the closest to following a simple random-walk-like process, though only in some regions. For  $r_o \lesssim 0.8$, it has a broad flat distribution in
$r_o \lesssim 0.8$, it has a broad flat distribution in  $\varOmega$ and an approximately linear increase with
$\varOmega$ and an approximately linear increase with  $r_o$, as would be commensurate with a random sampling in this geometry. However, this simple trend ends for
$r_o$, as would be commensurate with a random sampling in this geometry. However, this simple trend ends for  $r_o\gtrsim 0.8$, still well away from the
$r_o\gtrsim 0.8$, still well away from the  $r_o=1.5$ radius of contact. For radius
$r_o=1.5$ radius of contact. For radius  $a = 1$, non-zero rotation is the most likely, and the object rarely leaves the
$a = 1$, non-zero rotation is the most likely, and the object rarely leaves the  $r_o < 0.6$ region of the container. The
$r_o < 0.6$ region of the container. The  $a=1.5$ case is the most striking. The circle nearly always rotates, though slowly relative to the other cases. Its changes of direction, which are not uncommon, are sudden, contributing little to the
$a=1.5$ case is the most striking. The circle nearly always rotates, though slowly relative to the other cases. Its changes of direction, which are not uncommon, are sudden, contributing little to the  $\varOmega \approx 0$ portion of the distributions. Even this larger circle never approaches close to the container walls, rarely reaching beyond
$\varOmega \approx 0$ portion of the distributions. Even this larger circle never approaches close to the container walls, rarely reaching beyond  $r_o= 0.2$, which leaves a
$r_o= 0.2$, which leaves a  $\delta = 0.3$ gap before contact.
$\delta = 0.3$ gap before contact.
The mechanism that counters contact is visualized in figure 10 for a particularly close approach and subsequent repulsion for  $\alpha = -20$. The sequence starts in a period of fast rotation and correlated flow around the circumference of the circle. The overall flow at this time loosely resembles the uniform circulation flow of the
$\alpha = -20$. The sequence starts in a period of fast rotation and correlated flow around the circumference of the circle. The overall flow at this time loosely resembles the uniform circulation flow of the  $\alpha = -0.6$ case in figure 2, though with additional waviness reflecting its additional instabilities. In this state, the circle is pulled towards the container wall by shear-driven tensile normal stress, following the same basic margination mechanism of the geometric instability for weak activity discussed in § 3.2. However, as it approaches, there is a sharp decrease in this circle's rotation. The overall circulation fails rapidly as the gap narrows, and the strain rate in the gap drops similarly. The circulating flow is replaced by distinct vortices in the larger region, which resemble those associated with the travelling-wave instability observed in a fixed-wall annular geometry (Chen et al. Reference Chen, Gao and Gao2018). No flow structures appear in the smaller gap. Both the viscous resistance of this configuration and de-correlation of the azimuthal flow structure lead to slower rotation of the circle; compared to the approach phase, its rotation essentially ceases. Without sustaining shear strain, the net active stresses decay in the narrow region, as seen in figures 10(c–g). In this same period, the array of vortex-like structures strengthens and fills the wider gap. For each oppositely rotating vortex, the active shear component
$\alpha = -0.6$ case in figure 2, though with additional waviness reflecting its additional instabilities. In this state, the circle is pulled towards the container wall by shear-driven tensile normal stress, following the same basic margination mechanism of the geometric instability for weak activity discussed in § 3.2. However, as it approaches, there is a sharp decrease in this circle's rotation. The overall circulation fails rapidly as the gap narrows, and the strain rate in the gap drops similarly. The circulating flow is replaced by distinct vortices in the larger region, which resemble those associated with the travelling-wave instability observed in a fixed-wall annular geometry (Chen et al. Reference Chen, Gao and Gao2018). No flow structures appear in the smaller gap. Both the viscous resistance of this configuration and de-correlation of the azimuthal flow structure lead to slower rotation of the circle; compared to the approach phase, its rotation essentially ceases. Without sustaining shear strain, the net active stresses decay in the narrow region, as seen in figures 10(c–g). In this same period, the array of vortex-like structures strengthens and fills the wider gap. For each oppositely rotating vortex, the active shear component  ${\mathsf{D}}_{nt}$ on the circle changes sign, so they do not apply a significant net torque. In contrast, the normal stress component
${\mathsf{D}}_{nt}$ on the circle changes sign, so they do not apply a significant net torque. In contrast, the normal stress component  ${\mathsf{D}}_{nn}$ for all of them acts in the same tensile sense to draw the circle away from the container wall, which happens rapidly. All close approaches observed for all
${\mathsf{D}}_{nn}$ for all of them acts in the same tensile sense to draw the circle away from the container wall, which happens rapidly. All close approaches observed for all  $\alpha \le -10$ cases showed a similar evolution.
$\alpha \le -10$ cases showed a similar evolution.

Figure 10. Visualization of a near approach to the container wall and repulsion for  $\alpha = -20$ at times (a)
$\alpha = -20$ at times (a)  $t=456.5$, (b)
$t=456.5$, (b)  $t=457.5$, (c)
$t=457.5$, (c)  $t=458.5$, (d)
$t=458.5$, (d)  $t=459.5$, (e)
$t=459.5$, (e)  $t=460.5$, ( f)
$t=460.5$, ( f)  $t=461.5$, (g)
$t=461.5$, (g)  $t=462.5$, (h)
$t=462.5$, (h)  $t=463.5$, (i)
$t=463.5$, (i)  $t=464.5$. Blue arrows visualize the velocity
$t=464.5$. Blue arrows visualize the velocity  ${\boldsymbol {U}}$ and rotation rate
${\boldsymbol {U}}$ and rotation rate  $\varOmega$ of the immersed circle. Red arrows show the normal component
$\varOmega$ of the immersed circle. Red arrows show the normal component  ${\mathsf{D}}_{nn}$ of
${\mathsf{D}}_{nn}$ of  ${\boldsymbol{\mathsf{D}}}$ directed towards the immersed object and outer wall, with its specific angle linearly interpolated between closest points on each circle. Cyan arrows visualize the shear component
${\boldsymbol{\mathsf{D}}}$ directed towards the immersed object and outer wall, with its specific angle linearly interpolated between closest points on each circle. Cyan arrows visualize the shear component  ${\mathsf{D}}_{nt}$ in this same orientation. White contours are streamfunction
${\mathsf{D}}_{nt}$ in this same orientation. White contours are streamfunction  $\varPsi$ contours with spacing
$\varPsi$ contours with spacing  $\Delta \psi = 0.005$ in this rotating frame, and the same colour levels visualize the velocity magnitude
$\Delta \psi = 0.005$ in this rotating frame, and the same colour levels visualize the velocity magnitude  $|{\boldsymbol {u}}|$ in this same frame.
$|{\boldsymbol {u}}|$ in this same frame.
To illustrate the lift forces more explicitly, figure 11(a) visualizes a corresponding case with the circle held fixed ( ${\boldsymbol {U}}=0$ and
${\boldsymbol {U}}=0$ and  $\varOmega = 0$) at
$\varOmega = 0$) at  $r_o = 0.75$. Unlike the small
$r_o = 0.75$. Unlike the small  $\alpha$ cases, the suspension activity does not depend on the motion of the object to sustain it, and a vigorous flow persists in the larger space. The alternating vortex structures are distinct, and there is only weak flow in the narrow gap. Active stresses on the circle (figure 11b) reflect the alternating vortex structure, leading to a significant normal stress generally pulling the circle away from the container wall. The corresponding shear stresses alternate sign with near-zero mean.
$\alpha$ cases, the suspension activity does not depend on the motion of the object to sustain it, and a vigorous flow persists in the larger space. The alternating vortex structures are distinct, and there is only weak flow in the narrow gap. Active stresses on the circle (figure 11b) reflect the alternating vortex structure, leading to a significant normal stress generally pulling the circle away from the container wall. The corresponding shear stresses alternate sign with near-zero mean.

Figure 11. Case with  $\alpha = -20$ and the object fixed and not rotating (
$\alpha = -20$ and the object fixed and not rotating ( ${\boldsymbol {U}}=0$,
${\boldsymbol {U}}=0$,  $\varOmega = 0$) at
$\varOmega = 0$) at  $r_o = 0.75$. (a) Contours of the streamfunction
$r_o = 0.75$. (a) Contours of the streamfunction  $\psi$ with
$\psi$ with  $\Delta \psi = 0.005$ spacing and showing components of local
$\Delta \psi = 0.005$ spacing and showing components of local  ${\boldsymbol{\mathsf{D}}}$ as in figure 10, and
${\boldsymbol{\mathsf{D}}}$ as in figure 10, and  $|{\boldsymbol {u}}|$ (flood colours). (b) Components of
$|{\boldsymbol {u}}|$ (flood colours). (b) Components of  ${\boldsymbol{\mathsf{D}}}$ referenced to the object-normal direction, showing both an example instantaneous profile and a long-time average.
${\boldsymbol{\mathsf{D}}}$ referenced to the object-normal direction, showing both an example instantaneous profile and a long-time average.
The  $\alpha =-20$ case was selected for the above examination because the structures can be more clearly identified than for stronger activity levels. However, the same behaviour is observed for
$\alpha =-20$ case was selected for the above examination because the structures can be more clearly identified than for stronger activity levels. However, the same behaviour is observed for  $\alpha = -80$. Figure 12 visualizes the evolution of the flow structure in both cases for longer periods. The
$\alpha = -80$. Figure 12 visualizes the evolution of the flow structure in both cases for longer periods. The  $\alpha =-80$ case (figure 12b) shows more random and smaller structures than
$\alpha =-80$ case (figure 12b) shows more random and smaller structures than  $\alpha = -20$ (figure 12a), but both also show periods of relatively correlated circulating flow and periods with relatively distinct arrays of vortices of alternating sense. For
$\alpha = -20$ (figure 12a), but both also show periods of relatively correlated circulating flow and periods with relatively distinct arrays of vortices of alternating sense. For  $\alpha =-80$, these arrays are less distinct, due to smaller-scale instabilities available for this
$\alpha =-80$, these arrays are less distinct, due to smaller-scale instabilities available for this  $\alpha$. For both cases, rotation of the circle remains primarily in a single direction for periods. Still, even for
$\alpha$. For both cases, rotation of the circle remains primarily in a single direction for periods. Still, even for  $\alpha \le -10$, there are many reversals of rotation direction. It should be noted that the time periods visualized in figures 8, 10 and 12 are a small fraction of the total times simulated and analysed.
$\alpha \le -10$, there are many reversals of rotation direction. It should be noted that the time periods visualized in figures 8, 10 and 12 are a small fraction of the total times simulated and analysed.

Figure 12. Visualized streamfunction  $\psi$ for cases (a)
$\psi$ for cases (a)  $\alpha = -20$ and (b)
$\alpha = -20$ and (b)  $\alpha = -80$. The horizontal lines in the
$\alpha = -80$. The horizontal lines in the  $\gamma$–
$\gamma$– $t$ plots indicate the selected instances visualized to the right of each (with time increasing left to right, top to bottom); the
$t$ plots indicate the selected instances visualized to the right of each (with time increasing left to right, top to bottom); the  $\gamma$–
$\gamma$– $t$ data are taken on the circle of radius
$t$ data are taken on the circle of radius  $(R+a)/2 = 1.5$ that passes through the midpoint at the smallest and largest container–object separations. For each time,
$(R+a)/2 = 1.5$ that passes through the midpoint at the smallest and largest container–object separations. For each time,  $\psi = 0$ is set at
$\psi = 0$ is set at  $\gamma = \pm {\rm \pi}$, and there are 20 equally spaced contours between
$\gamma = \pm {\rm \pi}$, and there are 20 equally spaced contours between  $\pm |\psi |_{{max}}$. Animated visualizations of these cases are available in supplementary movies 6 and 10.
$\pm |\psi |_{{max}}$. Animated visualizations of these cases are available in supplementary movies 6 and 10.
5. Transition behaviour ($-5 \le \alpha \le -1$)

In § 3, where mobility of the object was essential for instability of the suspension, it was moved towards the container wall until viscous resistance limited its mobility to a degree that the suspension stabilized and flow ceased. In contrast, in § 4, the suspension remained active, even if the object was held fixed. When the object approached the container wall, organized activity in the gap was significantly suppressed, and the persistent activity in the bulk drew it away from the container wall. The transition between these behaviours is complex.
In some cases, the standoff distance is nearly constant. For example, for  $\alpha = -5$, it remains about
$\alpha = -5$, it remains about  $\delta \approx 0.045$ above the wall, with root mean square (r.m.s.) fluctuations of only
$\delta \approx 0.045$ above the wall, with root mean square (r.m.s.) fluctuations of only  $\sigma _s=0.005$, though its rotation rate fluctuates as it interacts with the unsteady vortical structures that persist in the flow (as will be seen in figure 14a). This stability was seen in figure 9(a): the radial position is stable, and it never changes its sense of rotation or precession. This reflects a balance between the sustained activity in the high-strain-rate narrow gap, also a feature of the weaker activity cases of § 3, and the tensile normal stresses of the persistent structures in the wider region that counter close approaches to the container wall in § 4. However, for somewhat weaker activity, such as
$\sigma _s=0.005$, though its rotation rate fluctuates as it interacts with the unsteady vortical structures that persist in the flow (as will be seen in figure 14a). This stability was seen in figure 9(a): the radial position is stable, and it never changes its sense of rotation or precession. This reflects a balance between the sustained activity in the high-strain-rate narrow gap, also a feature of the weaker activity cases of § 3, and the tensile normal stresses of the persistent structures in the wider region that counter close approaches to the container wall in § 4. However, for somewhat weaker activity, such as  $\alpha = -2.5$, the object seems to approach indefinitely towards contact, though increasingly slowly due to increasing lubrication resistance. To study this dynamics in an analogous statistically stationary flow that avoids the discretization challenges and physical complexity of actual contact, we constrain the circle to maintain a constant distance
$\alpha = -2.5$, the object seems to approach indefinitely towards contact, though increasingly slowly due to increasing lubrication resistance. To study this dynamics in an analogous statistically stationary flow that avoids the discretization challenges and physical complexity of actual contact, we constrain the circle to maintain a constant distance  $\delta _c$ from the wall. The corresponding Lagrange multiplier force is interpretable as countering the net hydrodynamic lift force
$\delta _c$ from the wall. The corresponding Lagrange multiplier force is interpretable as countering the net hydrodynamic lift force  $L$, which is negative towards and positive away from the adjacent container wall. In corresponding unconstrained free-flowing precessing cases, fluctuating forces cause variations in
$L$, which is negative towards and positive away from the adjacent container wall. In corresponding unconstrained free-flowing precessing cases, fluctuating forces cause variations in  $\delta$, but motion normal to the wall is so strongly resisted by lubrication effects that the corresponding changes in
$\delta$, but motion normal to the wall is so strongly resisted by lubrication effects that the corresponding changes in  $\delta$ are slow, allowing at most small
$\delta$ are slow, allowing at most small  $\delta$ fluctuation.
$\delta$ fluctuation.
The lift  $L$ is plotted in figure 13 for wall-distance constraints
$L$ is plotted in figure 13 for wall-distance constraints  $\delta _c = 0.10$,
$\delta _c = 0.10$,  $0.04$ and
$0.04$ and  $0.03$ for
$0.03$ for  $\alpha \in [-5,0]$. All these
$\alpha \in [-5,0]$. All these  $\delta _c$ show a cessation of motion, zero lift, and indeed absence of flow for small enough
$\delta _c$ show a cessation of motion, zero lift, and indeed absence of flow for small enough  $|\alpha |$, consistent with the
$|\alpha |$, consistent with the  $\delta$ and
$\delta$ and  $\alpha$ values needed for sustained activity in § 3. For stronger
$\alpha$ values needed for sustained activity in § 3. For stronger  $|\alpha |$ and smaller
$|\alpha |$ and smaller  $\delta _c$, the lift switches from attraction (
$\delta _c$, the lift switches from attraction ( $L<0$) to repulsion (
$L<0$) to repulsion ( $L>0$). This is consistent with the observed persistent precession for
$L>0$). This is consistent with the observed persistent precession for  $\alpha = -5$. The lift
$\alpha = -5$. The lift  $L$ is steady for smaller
$L$ is steady for smaller  $|\alpha |$, but this changes in two ways when
$|\alpha |$, but this changes in two ways when  $|\alpha |$ increases. A high-frequency instability appears, seemingly independently of
$|\alpha |$ increases. A high-frequency instability appears, seemingly independently of  $\delta _c$, for
$\delta _c$, for  $\alpha \lesssim -2.5$. This corresponds to the travelling-wave instability observed in the corresponding fixed-wall annular geometry and analysed in a planar configuration (Gao et al. Reference Gao, Betterton, Jhang and Shelley2017). The near independence of
$\alpha \lesssim -2.5$. This corresponds to the travelling-wave instability observed in the corresponding fixed-wall annular geometry and analysed in a planar configuration (Gao et al. Reference Gao, Betterton, Jhang and Shelley2017). The near independence of  $\delta _c$ is anticipated because it is expected to depend primarily on the vortices in the larger space, which barely change here for the range of
$\delta _c$ is anticipated because it is expected to depend primarily on the vortices in the larger space, which barely change here for the range of  $\delta _c$ considered. In all cases, the high-frequency component amplitude increases with stronger activity.
$\delta _c$ considered. In all cases, the high-frequency component amplitude increases with stronger activity.

Figure 13. The net lift force  $L$ normal to the container wall for different standoff distance constraints
$L$ normal to the container wall for different standoff distance constraints  $\delta _c$, plus one case with a completely fixed object with
$\delta _c$, plus one case with a completely fixed object with  $\delta = 0.04$. The lines indicate time averages (for time 1000 each), and the heights of the corresponding shaded regions indicate the
$\delta = 0.04$. The lines indicate time averages (for time 1000 each), and the heights of the corresponding shaded regions indicate the  $\pm \sigma$ r.m.s. fluctuations. The insets show
$\pm \sigma$ r.m.s. fluctuations. The insets show  $L(t)$ time series of length
$L(t)$ time series of length  $\Delta t = 250$, each with amplitude normalized by its respective
$\Delta t = 250$, each with amplitude normalized by its respective  $\sigma$.
$\sigma$.
For the fixed  ${\boldsymbol {U}}=0$,
${\boldsymbol {U}}=0$,  $\varOmega = 0$,
$\varOmega = 0$,  $\delta _c = 0.04$ case, also shown in figure 13,
$\delta _c = 0.04$ case, also shown in figure 13,  $L$ fluctuations also appear as
$L$ fluctuations also appear as  $\alpha \lesssim -2.5$, although their amplitude is smaller. For
$\alpha \lesssim -2.5$, although their amplitude is smaller. For  $\alpha = -5$,
$\alpha = -5$,  $L = 8.9 \pm 0.1$ (mean
$L = 8.9 \pm 0.1$ (mean  $\pm$ r.m.s.). The biggest difference, however, for this fixed case is that without significant shear strain between the fixed object and the container wall, there is no induced active stress attraction. Only the self-sustaining flow above the object is active, and it induces positive lift.
$\pm$ r.m.s.). The biggest difference, however, for this fixed case is that without significant shear strain between the fixed object and the container wall, there is no induced active stress attraction. Only the self-sustaining flow above the object is active, and it induces positive lift.
In some cases, there is also a distinct low frequency, with time scale comparable to the inverse precession rate. When the circle is further from the wall, this longer-period behaviour appears for smaller  $|\alpha |$. For
$|\alpha |$. For  $\delta _c = 0.10$, it is distinct for
$\delta _c = 0.10$, it is distinct for  $\alpha \lesssim -1.75$, as shown in the inset of figure 13, which is before the onset of the high-frequency instability. However, it appears, apparently suddenly, only for
$\alpha \lesssim -1.75$, as shown in the inset of figure 13, which is before the onset of the high-frequency instability. However, it appears, apparently suddenly, only for  $\alpha \lesssim -3.35$ for
$\alpha \lesssim -3.35$ for  $\delta _c = 0.04$, and
$\delta _c = 0.04$, and  $\alpha \lesssim -4.60$ for
$\alpha \lesssim -4.60$ for  $\delta _c = 0.03$. Under some conditions, it is of higher amplitude than the travelling-wave instability, and always much lower frequency. It is never observed if the circle is held fixed with
$\delta _c = 0.03$. Under some conditions, it is of higher amplitude than the travelling-wave instability, and always much lower frequency. It is never observed if the circle is held fixed with  ${\boldsymbol {U}} = 0$ and
${\boldsymbol {U}} = 0$ and  $\varOmega = 0$. Its mechanism is straightforward to explain, but the complexity of the overall configuration hampers a full quantitative description. Recall that the circle rotates with a sense opposite to what it would be were it rolling along the container wall. It thus pumps fluid ahead of it through the narrow gap between it and the wall, which in turn drives an additional slow circulation of fluid in the container, so the overall circulating flow rate modestly exceeds that of the precession rate of the circle. When this is strong enough, it advects the basic travelling-wave instability structures faster than the precession rate. This does not happen for weaker activity, when the structures exist typically as a counter-rotating pair filling in the largest region of fluid. It also is suppressed for smaller
$\varOmega = 0$. Its mechanism is straightforward to explain, but the complexity of the overall configuration hampers a full quantitative description. Recall that the circle rotates with a sense opposite to what it would be were it rolling along the container wall. It thus pumps fluid ahead of it through the narrow gap between it and the wall, which in turn drives an additional slow circulation of fluid in the container, so the overall circulating flow rate modestly exceeds that of the precession rate of the circle. When this is strong enough, it advects the basic travelling-wave instability structures faster than the precession rate. This does not happen for weaker activity, when the structures exist typically as a counter-rotating pair filling in the largest region of fluid. It also is suppressed for smaller  $\delta _c$ cases because there is less of this circulation flow driven by the smaller gap spacing, which is insufficient to overcome the preferred arrangement of the vortex array. This is consistent with there also being no low-frequency component in the fully fixed case.
$\delta _c$ cases because there is less of this circulation flow driven by the smaller gap spacing, which is insufficient to overcome the preferred arrangement of the vortex array. This is consistent with there also being no low-frequency component in the fully fixed case.
Figure 14 shows the space–time behaviour of the flow leading to the observed lift and motion for several of the specific cases. Figures 14(a,b) show the strong similarity between the unconstrained  $\delta$ evolution (figure 14a) versus contained motion at a similar
$\delta$ evolution (figure 14a) versus contained motion at a similar  $\delta =\delta _c$ (figure 14b) for
$\delta =\delta _c$ (figure 14b) for  $\alpha = -5$. Both show both the high- and low-frequency components. The travelling-wave instability manifests as a high-frequency, spatially correlated perturbation. It is associated with a synchronized change in the shape of the vortex structures; although each vortex remains distinct, their amplitudes and aspect ratios both change at this higher frequency. The low frequency arises from the slow advection of these structures at a speed modestly faster than the precession. For
$\alpha = -5$. Both show both the high- and low-frequency components. The travelling-wave instability manifests as a high-frequency, spatially correlated perturbation. It is associated with a synchronized change in the shape of the vortex structures; although each vortex remains distinct, their amplitudes and aspect ratios both change at this higher frequency. The low frequency arises from the slow advection of these structures at a speed modestly faster than the precession. For  $\alpha =-2$ and
$\alpha =-2$ and  $\delta _c = 0.10$ in figure 14(c), the structures themselves do not fluctuate rapidly, so no high-frequency component is evident, although the low-frequency component is pronounced. Their slow advection is similar to the low-frequency component in the
$\delta _c = 0.10$ in figure 14(c), the structures themselves do not fluctuate rapidly, so no high-frequency component is evident, although the low-frequency component is pronounced. Their slow advection is similar to the low-frequency component in the  $\alpha =-5$ cases in figures 14(a,b). In all these cases, new small vortices form ahead of the precessing circle, grow as they advect slightly faster than the circle, and eventually weaken and disappear as they catch up to its trailing side.
$\alpha =-5$ cases in figures 14(a,b). In all these cases, new small vortices form ahead of the precessing circle, grow as they advect slightly faster than the circle, and eventually weaken and disappear as they catch up to its trailing side.

Figure 14. Visualized streamfunction  $\psi$, with either a constrained wall-separation height
$\psi$, with either a constrained wall-separation height  $\delta _c$ or unconstrained mean separation
$\delta _c$ or unconstrained mean separation  $\bar \delta$ with r.m.s. fluctuations
$\bar \delta$ with r.m.s. fluctuations  $\sigma$: (a)
$\sigma$: (a)  $\alpha =-5$,
$\alpha =-5$,  $\bar \delta = 0.0445$ with
$\bar \delta = 0.0445$ with  $\sigma = 0.005$; (b)
$\sigma = 0.005$; (b)  $\alpha = -5$,
$\alpha = -5$,  $\delta _c=0.04$; (c)
$\delta _c=0.04$; (c)  $\alpha = -2$,
$\alpha = -2$,  $\delta _c = 0.10$; (d)
$\delta _c = 0.10$; (d)  $\alpha = -2.5$,
$\alpha = -2.5$,  $\bar \delta = 0.0124$ with
$\bar \delta = 0.0124$ with  $\sigma =8\times 10^{-5}$; (e)
$\sigma =8\times 10^{-5}$; (e)  $\alpha = -4$,
$\alpha = -4$,  $\delta _c = 0.03$. The horizontal lines in the
$\delta _c = 0.03$. The horizontal lines in the  $\gamma$–
$\gamma$– $t$ plots indicate the instances visualized to the right of each (with time increasing left to right, top to bottom); the
$t$ plots indicate the instances visualized to the right of each (with time increasing left to right, top to bottom); the  $\gamma$–
$\gamma$– $t$ data are taken on the circle of radius
$t$ data are taken on the circle of radius  $(R+a)/2 = 1.5$ that passes through the midpoint at smallest and largest container–object separations. For each time,
$(R+a)/2 = 1.5$ that passes through the midpoint at smallest and largest container–object separations. For each time,  $\psi = 0$ is set at
$\psi = 0$ is set at  $\gamma = \pm {\rm \pi}$, with 20 equally spaced contours between the overall
$\gamma = \pm {\rm \pi}$, with 20 equally spaced contours between the overall  $\pm |\psi |_{{max}}$. To facilitate comparisons, cases are shown for which the symmetry breaking initial perturbations resulted in the circle rotation and its precession both being clockwise. Animated visualizations for (a,d) are available in supplementary movies 3 and 4.
$\pm |\psi |_{{max}}$. To facilitate comparisons, cases are shown for which the symmetry breaking initial perturbations resulted in the circle rotation and its precession both being clockwise. Animated visualizations for (a,d) are available in supplementary movies 3 and 4.
For the unconstrained  $\alpha = -2.5$ case, the circle precesses close to the container wall, with only two prominent and steady counter-rotating lift-promoting vortices filling the container opposite it (figure 14d). No instability or unsteadiness is apparent in this case, though this structure resembles those that do become unstable with a long period for either larger
$\alpha = -2.5$ case, the circle precesses close to the container wall, with only two prominent and steady counter-rotating lift-promoting vortices filling the container opposite it (figure 14d). No instability or unsteadiness is apparent in this case, though this structure resembles those that do become unstable with a long period for either larger  $|\alpha |$ or larger
$|\alpha |$ or larger  $\delta _c$. For small
$\delta _c$. For small  $\delta _c$, increasing
$\delta _c$, increasing  $|\alpha |$ shows the similar high-frequency instability seen in other cases, though for
$|\alpha |$ shows the similar high-frequency instability seen in other cases, though for  $\alpha = -4$ and
$\alpha = -4$ and  $\delta _c = 0.03$, the fluctuating vortices themselves still precess in lockstep with the circle (figure 14e), so there is no low frequency in this case.
$\delta _c = 0.03$, the fluctuating vortices themselves still precess in lockstep with the circle (figure 14e), so there is no low frequency in this case.
6. Summary and discussion
For weak activity, mobility of the object decreases the stability of the suspension relative to the corresponding fixed geometry, resulting in a lower threshold for sustained flow. These cases also all transport the object towards a nearby wall, with active shearing stress in the space between it and the wall maintained by the shear strain rate due to its counter-rolling motion along the wall. Attraction towards the wall is due to the concomitant tensile normal component produced in the gap. As the object approaches, viscous resistance decreases its rotational mobility, which for sufficiently weak activity stabilizes the entire system, leaving the object in a fixed location near the wall. The wall distance of arrest is larger for weaker activity. Though only a circle-in-circle configuration was considered here, this potential self-induced cessation of instability is anticipated to be a feature of many such systems: if suspension instability depends on the mobility of the object, then it will be stabilized if the object is transported to a region where its mobility is sufficiently low. It is noteworthy that this directed and self-terminating transport arises without chemoattractants or similar complex mechanisms that might direct motion in biological systems.
In contrast, when the activity is strong, the mobility of the object is not essential for the instability of the suspension. In this case, the object is advected chaotically, although not following any simple random-walk-like statistical distribution, and it never reaches the container walls. The lift force preventing contact derives from the greater activity in the active bulk fluid region versus the relatively suppressed activity in the fluid that is temporarily confined between the object and the wall. This mechanism is observed to be robust: the object remained well off the wall even in long simulations for a range of activity strengths. Similarly, objects initialized near the wall were quickly lifted away from it (not shown), and objects held fixed near the wall experienced a lift force away from it.
For modest activity strengths, lift force fluctuations were associated with wave-like instabilities, as observed in similar fixed geometries, and with precession along the wall. For greater activity, these create net lift, but for weaker activity, they do not overcome the gap-driven attraction towards the wall. In essence, when activity is concentrated close to the wall under the object, enhanced there by the high strain rate in that region, it draws the object closer to the wall. In contrast, modestly stronger  $|\alpha |$ supports more bulk region active flow, independently of the object, and draws it further from the wall. Net lift decreases and changes sign with increased distance from the wall, which leads in some cases to nearly constant standoff distances, for which motion along the wall is indefinitely persistent in a single direction. For still weaker but sufficient activity to maintain flow in absence of object mobility, the net result is a persistent wallward force, countered only by the usual wall-normal lubrication resistance and which can be anticipated to eventually lead to contact.
$|\alpha |$ supports more bulk region active flow, independently of the object, and draws it further from the wall. Net lift decreases and changes sign with increased distance from the wall, which leads in some cases to nearly constant standoff distances, for which motion along the wall is indefinitely persistent in a single direction. For still weaker but sufficient activity to maintain flow in absence of object mobility, the net result is a persistent wallward force, countered only by the usual wall-normal lubrication resistance and which can be anticipated to eventually lead to contact.
Collectively, these behaviours suggest scenarios where modulations of the overall activity of the suspension could lead to sequences of the events that could achieve useful transport objectives. For example, a brief period of high activity (e.g.  $\alpha \lesssim -10$) will pick up an object from a wall. Following that, modest activity (e.g.
$\alpha \lesssim -10$) will pick up an object from a wall. Following that, modest activity (e.g.  $-5 < \alpha < -2$) could then transport it some distance in a deterministic way, following the contour of a container wall, as for the
$-5 < \alpha < -2$) could then transport it some distance in a deterministic way, following the contour of a container wall, as for the  $\alpha = -5$ case. Two scenarios could then deliver the object to another location. In the simpler case,
$\alpha = -5$ case. Two scenarios could then deliver the object to another location. In the simpler case,  $|\alpha |$ would diminish to stabilize the suspension so all motion stops. More interestingly, the object could also autonomically arrest at a point where it encounters a region of confinement that sufficiently diminishes its hydrodynamic mobility.
$|\alpha |$ would diminish to stabilize the suspension so all motion stops. More interestingly, the object could also autonomically arrest at a point where it encounters a region of confinement that sufficiently diminishes its hydrodynamic mobility.
There are many caveats to keep in mind with such a simple model. In our particular case, we recognize that a small enough spacing between the object will violate the coarse-graining approach of the suspension model used. For example, steric interaction might cause additional repulsive forces, or alignment might be forced directly by the geometry. Similarly, three-dimensional effects will surely alter the details of any such flow, though the mechanisms discussed here are anticipated to be robust to dimensionality. Such investigations and generalization are left to further investigations. It will be interesting if any of these mechanisms can be identified in experiments.
Supplementary movies
Supplementary movies are available at https://doi.org/10.1017/jfm.2023.191.
Acknowledgements
The author is grateful for thoughtful input from Professor R.H. Ewoldt, who made comments on a draft of this paper.
Declaration of interests
The author reports no conflict of interest.
















































































































































 Open access
Open access