



1. Introduction
A nematic liquid crystal (LC) is a state of matter in which molecules or elongated composites immersed in a solvent possess orientational order but not positional order (de Gennes & Prost Reference de Gennes and Prost1993). The local molecular orientation is represented as a director field  $\boldsymbol {n}(\boldsymbol {x})$, with spatial position
$\boldsymbol {n}(\boldsymbol {x})$, with spatial position  $\boldsymbol {x}$ and
$\boldsymbol {x}$ and  $|\boldsymbol {n}|=1$. Among the unusual features of a fluid so composed is the elastic response to deformation of the orientation field, which results in a non-vanishing stress on confining or internal boundaries even at equilibrium. The nature of this stress depends critically upon the preferred director orientation on a given surface and the associated anchoring energy. Common boundary conditions include homogeneous (tangential) and homeotropic (perpendicular) alignment (Jerome Reference Jerome1991).
$|\boldsymbol {n}|=1$. Among the unusual features of a fluid so composed is the elastic response to deformation of the orientation field, which results in a non-vanishing stress on confining or internal boundaries even at equilibrium. The nature of this stress depends critically upon the preferred director orientation on a given surface and the associated anchoring energy. Common boundary conditions include homogeneous (tangential) and homeotropic (perpendicular) alignment (Jerome Reference Jerome1991).
Although difficult to obtain in general, an analytical representation of the equilibrium state of a liquid crystal with an internal boundary is greatly desired for theoretical efforts to understand a wide range of phenomena, including LC-mediated elastic interactions between bodies (Poulin et al. Reference Poulin, Stark, Lubensky and Weitz1997; Cheung & Allen Reference Cheung and Allen2008; Lapointe, Mason & Smalyukh Reference Lapointe, Mason and Smalyukh2009; Tomar et al. Reference Tomar, Roberts, Abbott, Hernández-Ortiz and De Pablo2012) the deformation of soft immersed bodies (Mackay & Denniston Reference Mackay and Denniston2013; Mushenheim et al. Reference Mushenheim, Pendery, Weibel, Spagnolie and Abbott2016; Zhang et al. Reference Zhang, Zhou, Martínez-González, Hernández-Ortiz, Abbott and de Pablo2016; Nayani et al. Reference Nayani, Evans, Spagnolie and Abbott2020; Schimming & Viñals Reference Schimming and Viñals2022) and the dynamics of bodies immersed in active suspensions (Ray, Zhang & Dogic Reference Ray, Zhang and Dogic2023). Such representations may also be needed to explore the anisotropic viscous drag on moving bodies (Ruhwandl & Terentjev Reference Ruhwandl and Terentjev1995; Stark & Ventzki Reference Stark and Ventzki2001; Loudet, Hanusse & Poulin Reference Loudet, Hanusse and Poulin2004; Gómez-González & del Álamo Reference Gómez-González and del Álamo2013) and in applications like microrheology (Córdoba et al. Reference Córdoba, Stieger, Mazza, Schoen and de Pablo2016; Gómez-González & del Álamo Reference Gómez-González and del Álamo2016). More detailed discussions have recently been provided by Muševič (Reference Muševič2017) and Smalyukh (Reference Smalyukh2018). Biological fluids like mucus and dense cell populations also exhibit anisotropy (Viney, Huber & Verdugo Reference Viney, Huber and Verdugo1993; Volfson et al. Reference Volfson, Cookson, Hasty and Tsimring2008), as does the cytoskeleton during cell division (Needleman & Dogic Reference Needleman and Dogic2017). The stresses and dynamics of bodies immersed in these settings may have profound implications for biological function. Among other consequences, fluid anisotropy can strongly impact bacterial locomotion (Mushenheim et al. Reference Mushenheim, Trivedi, Tuson, Weibel and Abbott2014; Zhou et al. Reference Zhou, Sokolov, Lavrentovich and Aranson2014; Krieger, Dias & Powers Reference Krieger, Dias and Powers2015; Trivedi et al. Reference Trivedi, Maeda, Abbott, Spagnolie and Weibel2015; Figueroa-Morales et al. Reference Figueroa-Morales, Dominguez-Rubio, Ott and Aranson2019; Spagnolie & Underhill Reference Spagnolie and Underhill2023). Active colloids and droplets in liquid crystals have accordingly become an appealing synthetic means of examining motile living systems (Jeong et al. Reference Jeong, Gross, Wei, Tu, Lee, Collings and Yodh2015; Bukusoglu et al. Reference Bukusoglu, Bedolla Pantoja, Mushenheim, Wang and Abbott2016; Krüger et al. Reference Krüger, Klös, Bahr and Maass2016; Lavrentovich Reference Lavrentovich2016; Nayani, Córdova-Figueroa & Abbott Reference Nayani, Córdova-Figueroa and Abbott2019).
Adding to the challenge of determining equilibrium states are singularities in the director field, which must appear as a consequence of topological conservation laws (Alexander et al. Reference Alexander, Chen, Matsumoto and Kamien2012); for example, bipolar surface ‘boojum’ singularities can appear in the case of strong homogeneous anchoring (Volovik & Lavrentovich Reference Volovik and Lavrentovich1983). Homeotropic anchoring, meanwhile, encourages the appearance of a defect in the bulk LC as either a point singularity, a Saturn-ring line defect (Terentjev Reference Terentjev1995; Lubensky et al. Reference Lubensky, Pettey, Currier and Stark1998; Gu & Abbott Reference Gu and Abbott2000) or an even more exotic configuration (Lintuvuori et al. Reference Lintuvuori, Marenduzzo, Stratford and Cates2010; Foffano et al. Reference Foffano, Lintuvuori, Tiribocchi and Marenduzzo2014). The large energy associated with topological defects results in effective interactions between them (Lubensky et al. Reference Lubensky, Pettey, Currier and Stark1998; Gartland, Sonnet & Virga Reference Gartland, Sonnet and Virga2002; Harth & Stannarius Reference Harth and Stannarius2020), which has been a major recent focus in the dynamics of active suspensions (Giomi et al. Reference Giomi, Bowick, Ma and Marchetti2013; Keber et al. Reference Keber, Loiseau, Sanchez, DeCamp, Giomi, Bowick, Marchetti, Dogic and Bausch2014; Doostmohammadi et al. Reference Doostmohammadi, Ignés-Mullol, Yeomans and Sagués2018; Aranson Reference Aranson2019; Shankar et al. Reference Shankar, Souslov, Bowick, Marchetti and Vitelli2022). In general, the location of the defects on the surface or in the fluid depends on the relationship between the bulk elastic energy and the surface anchoring strength, and while also not simple to determine, is an important part of understanding the LC equilibrium and any associated surface stresses.
Assuming small gradients in the director field, the distortion free energy density within the bulk of a nematic LC is given by
 \begin{equation} \mathcal{F}_{bulk} := \tfrac{1}{2} K_1 (\boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{n})^2 +\tfrac{1}{2} K_2 (\boldsymbol{n}\boldsymbol{\cdot}\boldsymbol{\nabla}\times\boldsymbol{n})^2 +\tfrac{1}{2} K_3 |\boldsymbol{n}\times \boldsymbol{\nabla}\times\boldsymbol{n}|^2, \end{equation}
\begin{equation} \mathcal{F}_{bulk} := \tfrac{1}{2} K_1 (\boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{n})^2 +\tfrac{1}{2} K_2 (\boldsymbol{n}\boldsymbol{\cdot}\boldsymbol{\nabla}\times\boldsymbol{n})^2 +\tfrac{1}{2} K_3 |\boldsymbol{n}\times \boldsymbol{\nabla}\times\boldsymbol{n}|^2, \end{equation}
where  $K_1$,
$K_1$,  $K_2$ and
$K_2$ and  $K_3$ are the splay, twist, and bend Frank elastic constants, respectively (de Gennes & Prost Reference de Gennes and Prost1993; Stewart Reference Stewart2004). A nematic state has only orientational order – phases with additional structure, for instance smectics with layers of oriented regions, have different energy densities. It is thus common to assume the one-constant approximation, i.e.
$K_3$ are the splay, twist, and bend Frank elastic constants, respectively (de Gennes & Prost Reference de Gennes and Prost1993; Stewart Reference Stewart2004). A nematic state has only orientational order – phases with additional structure, for instance smectics with layers of oriented regions, have different energy densities. It is thus common to assume the one-constant approximation, i.e.  $K:= K_1=K_2=K_3$, as we shall for the remainder of the paper. Settings in which the nematic distortions are confined to a plane are particularly amenable to mathematical analysis, particularly when the bend and splay constants are identical,
$K:= K_1=K_2=K_3$, as we shall for the remainder of the paper. Settings in which the nematic distortions are confined to a plane are particularly amenable to mathematical analysis, particularly when the bend and splay constants are identical,  $K:=K_1=K_3$. The two-dimensional director field can then be described by a director angle,
$K:=K_1=K_3$. The two-dimensional director field can then be described by a director angle,  $\theta (x,y)$, which is defined so that
$\theta (x,y)$, which is defined so that  $\boldsymbol {n}\equiv (\cos \theta,\sin \theta,0)$. (Note that
$\boldsymbol {n}\equiv (\cos \theta,\sin \theta,0)$. (Note that  $\theta (x,y)$ is only uniquely defined modulo
$\theta (x,y)$ is only uniquely defined modulo  ${\rm \pi}$ due to the assumed reflective symmetry of the LC constituents.) With this additional simplification, the free energy is a Dirichlet energy,
${\rm \pi}$ due to the assumed reflective symmetry of the LC constituents.) With this additional simplification, the free energy is a Dirichlet energy,
 \begin{equation} \mathcal{F}_{bulk} = \tfrac{1}{2}K |\boldsymbol{\nabla}\theta|^2. \end{equation}
\begin{equation} \mathcal{F}_{bulk} = \tfrac{1}{2}K |\boldsymbol{\nabla}\theta|^2. \end{equation}
Applying the principle of virtual work yields Laplace's equation,  $\nabla ^2\theta =0$, which describes the bulk equilibrium configuration of the two-dimensional nematic assuming the one-constant approximation. Thus, were it not for nonlinear mixed boundary conditions and additional constraints imposed by topology, the equilibrium state would be simple to deduce.
$\nabla ^2\theta =0$, which describes the bulk equilibrium configuration of the two-dimensional nematic assuming the one-constant approximation. Thus, were it not for nonlinear mixed boundary conditions and additional constraints imposed by topology, the equilibrium state would be simple to deduce.
While analytical solutions are sparse, some geometries admit analytical forms for these LC configurations; for instance, in or outside tactoid geometries (Paparini & Virga Reference Paparini and Virga2021), outside a cylinder (Burylov & Raikher Reference Burylov and Raikher1994; Loewe & Shendruk Reference Loewe and Shendruk2022) and in an annulus (Lewis et al. Reference Lewis, Aarts, Howell and Majumdar2017). Among the more elegant approaches to solving such problems, however, is the use of complex variables and related techniques. This approach has a very long history in fluid mechanics and in a multitude of engineering disciplines (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003; Crowdy Reference Crowdy2020). Some recent applications in fluids have included microorganism swimming (Crowdy et al. Reference Crowdy, Lee, Samson, Lauga and Hosoi2011), dissolution and melting (Rycroft & Bazant Reference Rycroft and Bazant2016) and flow over a bubble mattress (Schnitzer Reference Schnitzer2016; Yariv & Crowdy Reference Yariv and Crowdy2020). In the context of liquid crystals, this approach has already been used successfully to study LC configurations in rectangular wells and steps (Davidson & Mottram Reference Davidson and Mottram2012), near boundaries with periodic wavy surfaces (Davidson & Mottram Reference Davidson and Mottram2012; Ledney et al. Reference Ledney, Tarnavskyy, Lesiuk and Reshetnyak2016), in spindles (Van Bijnen, Otten & van der Schoot Reference Van Bijnen, Otten and van der Schoot2012) and on curved surfaces (Vitelli & Nelson Reference Vitelli and Nelson2006). Complex variables techniques have also been used to explore the relationship between topological defects and cell geometry and alignment (Leoni et al. Reference Leoni, Manyuhina, Bowick and Marchetti2017; Miyazako & Nara Reference Miyazako and Nara2022).
In this paper, we set out to determine the equilibrium configuration of a nematic LC outside an immersed body in two dimensions. To achieve this, we shall utilize a complex variables formulation, which will allow the construction of analytical representations of the director field using techniques such as conformal mapping. We shall also develop an ‘effective boundary technique’, which will enable the consideration of both strong (infinite-strength) and weak (finite-strength) anchoring of the nematic director field to the immersed boundary alike. Defect locations, net free energies, local surface tractions, and body forces and torques shall all be discussed in the context of this formulation. Furthermore, by considering different body shapes and anchoring conditions, we make analogies with potential fluid flows and related paradoxes. Namely, results similar to the classical d'Alembert paradox, regarding the net force and torque on an immersed body; Stokes’ paradox, regarding the unsolvability of the two-dimensional problem when a non-zero body torque is imposed; and the Kutta condition, which selects a free circulation when a body has a sharp corner.
This paper is organized as follows. The mathematical formulation is presented in § 2, including a discussion of the anchoring boundary conditions and surface traction. The system is then made dimensionless, a complex variables formulation is introduced, and the total force and torque on the body are written as contour integrals. In § 3, an effective boundary technique is constructed in order to solve problems with finite anchoring strength, and to show that finite anchoring strengths regularize an otherwise unbounded energy associated with topological defects. Then, beginning with § 4, we present three worked examples, which demonstrate the methodology for determining the two-dimensional director field. In §§ 4 and 5, we consider two domains with homogeneous anchoring conditions: an immersed cylinder and an immersed equilateral triangle. Finally, in § 6, we use the methodology to solve the problem of a mobile Janus particle with hybrid anchoring conditions. We close with final remarks in § 7.
2. Mathematical formulation
Consider a two-dimensional nematic liquid crystal outside a simply connected body, we denote this domain  $D$ with boundary
$D$ with boundary  $\partial D$, as sketched in figure 1. Assuming the one-constant approximation, the director angle,
$\partial D$, as sketched in figure 1. Assuming the one-constant approximation, the director angle,  $\theta (x,y)$, is described by the bulk free energy in (1.2). At the boundaries, we assume the Rapini–Papoular form of the surface anchoring energy,
$\theta (x,y)$, is described by the bulk free energy in (1.2). At the boundaries, we assume the Rapini–Papoular form of the surface anchoring energy,  $\mathcal {F}_{surface} := W\sin ^2(\theta -\phi )/2$, where
$\mathcal {F}_{surface} := W\sin ^2(\theta -\phi )/2$, where  $W$ is the anchoring strength and
$W$ is the anchoring strength and  $\phi$ is the preferred orientation, which is generally a function of the local boundary orientation (Rapini & Papoular Reference Rapini and Papoular1969). For tangential anchoring,
$\phi$ is the preferred orientation, which is generally a function of the local boundary orientation (Rapini & Papoular Reference Rapini and Papoular1969). For tangential anchoring,  $\phi$ is the surface tangent angle. Combining the bulk and surface energies, the total energy of the configuration is defined as
$\phi$ is the surface tangent angle. Combining the bulk and surface energies, the total energy of the configuration is defined as
 \begin{equation} \mathcal{E} := \frac{K}{2}\iint_{\mathcal{D}}|\boldsymbol{\nabla} \theta|^2\,\mathrm{d} A + \frac{W}{2}\int_{\partial D}\sin^2(\theta-\phi)\,\mathrm{d} s, \end{equation}
\begin{equation} \mathcal{E} := \frac{K}{2}\iint_{\mathcal{D}}|\boldsymbol{\nabla} \theta|^2\,\mathrm{d} A + \frac{W}{2}\int_{\partial D}\sin^2(\theta-\phi)\,\mathrm{d} s, \end{equation}
where  $\mathrm {d} A$ and
$\mathrm {d} A$ and  $\mathrm {d} s$ are the infinitesimal surface area and arclength elements, respectively.
$\mathrm {d} s$ are the infinitesimal surface area and arclength elements, respectively.

Figure 1. Sketch of the domain considered in this paper: a rigid body immersed in a two-dimensional nematic liquid crystal. The liquid crystal is described by a director field  $\boldsymbol {n} = (\cos \theta, \sin \theta, 0)$ with director angle
$\boldsymbol {n} = (\cos \theta, \sin \theta, 0)$ with director angle  $\theta (z)\in [0,{\rm \pi} )$ for
$\theta (z)\in [0,{\rm \pi} )$ for  $z\in D$. The boundary of the body is shown as a solid curve,
$z\in D$. The boundary of the body is shown as a solid curve,  $\partial D$, with unit normal and tangent vectors
$\partial D$, with unit normal and tangent vectors  $\boldsymbol {\hat {\nu }}(s)$ and
$\boldsymbol {\hat {\nu }}(s)$ and  $\boldsymbol {\hat {s}}(s)$, respectively. The effective boundary (used in the effective boundary technique, § 3) is shown as a dashed curve,
$\boldsymbol {\hat {s}}(s)$, respectively. The effective boundary (used in the effective boundary technique, § 3) is shown as a dashed curve,  $\partial D_w$.
$\partial D_w$.
A variational principle applied to (2.1) yields the equilibrium equations for the director angle,  $\theta (x,y)$ (see Appendix A),
$\theta (x,y)$ (see Appendix A),
 \begin{equation} \nabla^2\theta = 0\quad \text{in }D, \end{equation}
\begin{equation} \nabla^2\theta = 0\quad \text{in }D, \end{equation}subject to the weak anchoring boundary condition,
 \begin{equation} -K\frac{\partial \theta}{\partial\hat{\nu}} + \frac{W}{2}\sin[2(\theta-\phi)] =0\quad \text{on }\partial D, \end{equation}
\begin{equation} -K\frac{\partial \theta}{\partial\hat{\nu}} + \frac{W}{2}\sin[2(\theta-\phi)] =0\quad \text{on }\partial D, \end{equation}
where  $\boldsymbol {\hat {\nu }}:= -\boldsymbol {x}_s^\perp$ is the liquid crystal pointing unit normal, as depicted in figure 1.
$\boldsymbol {\hat {\nu }}:= -\boldsymbol {x}_s^\perp$ is the liquid crystal pointing unit normal, as depicted in figure 1.
One of the goals of this work is to introduce a methodology for computing the force exerted on a body immersed in a liquid crystal. The liquid crystal imposes stress according to the Ericksen stress tensor  $\sigma := -p I - K\boldsymbol {\nabla } \boldsymbol {n}^{\rm T}\boldsymbol {\nabla } \boldsymbol {n}$ with hydrostatic pressure
$\sigma := -p I - K\boldsymbol {\nabla } \boldsymbol {n}^{\rm T}\boldsymbol {\nabla } \boldsymbol {n}$ with hydrostatic pressure  $p:= -K\lVert \boldsymbol {\nabla } \boldsymbol {n}\rVert ^2/2$ (de Gennes & Prost Reference de Gennes and Prost1993; Stewart Reference Stewart2004). On
$p:= -K\lVert \boldsymbol {\nabla } \boldsymbol {n}\rVert ^2/2$ (de Gennes & Prost Reference de Gennes and Prost1993; Stewart Reference Stewart2004). On  $\partial D$, there is a additional stress, which originates from the weak anchoring surface energy (Virga Reference Virga2018). A virtual work argument yields the total surface traction acting on the boundary
$\partial D$, there is a additional stress, which originates from the weak anchoring surface energy (Virga Reference Virga2018). A virtual work argument yields the total surface traction acting on the boundary  $\partial D$ (see Appendix A),
$\partial D$ (see Appendix A),
 \begin{align} \boldsymbol{t} &= \mathcal{F}_{bulk}\boldsymbol{\hat{\nu}}-\left(\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\frac{\partial \mathcal{F}_{bulk}}{\partial\boldsymbol{\nabla}\theta} \right)\boldsymbol{\nabla}\theta + \left(\mathcal{F}_{surface}\boldsymbol{\hat{s}}-\frac{\partial \mathcal{F}_{surface}}{\partial \phi} \boldsymbol{\hat{\nu}} \right)_{s}\nonumber\\ &=K\left(\frac{1}{2}|\boldsymbol{\nabla}\theta|^2\boldsymbol{\hat{\nu}}-\frac{\partial \theta}{\partial\hat{\nu}} \boldsymbol{\nabla}\theta\right)+ \frac{W}{2}\{\sin(\theta-\phi)^2 \boldsymbol{\hat{s}}+\sin[2(\theta-\phi)]\boldsymbol{\hat{\nu}} \}_{s}, \end{align}
\begin{align} \boldsymbol{t} &= \mathcal{F}_{bulk}\boldsymbol{\hat{\nu}}-\left(\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\frac{\partial \mathcal{F}_{bulk}}{\partial\boldsymbol{\nabla}\theta} \right)\boldsymbol{\nabla}\theta + \left(\mathcal{F}_{surface}\boldsymbol{\hat{s}}-\frac{\partial \mathcal{F}_{surface}}{\partial \phi} \boldsymbol{\hat{\nu}} \right)_{s}\nonumber\\ &=K\left(\frac{1}{2}|\boldsymbol{\nabla}\theta|^2\boldsymbol{\hat{\nu}}-\frac{\partial \theta}{\partial\hat{\nu}} \boldsymbol{\nabla}\theta\right)+ \frac{W}{2}\{\sin(\theta-\phi)^2 \boldsymbol{\hat{s}}+\sin[2(\theta-\phi)]\boldsymbol{\hat{\nu}} \}_{s}, \end{align}
where  $\boldsymbol {\hat {\nu }}:= -\boldsymbol {x}_s^\perp$ and
$\boldsymbol {\hat {\nu }}:= -\boldsymbol {x}_s^\perp$ and  $\boldsymbol {\hat {s}}:= \boldsymbol {x}_s$ are the unit normal and tangent vectors, respectively, and subscript
$\boldsymbol {\hat {s}}:= \boldsymbol {x}_s$ are the unit normal and tangent vectors, respectively, and subscript  $s$ denotes an arclength derivative, which is defined anticlockwise.
$s$ denotes an arclength derivative, which is defined anticlockwise.
Overall, given a harmonic director field that satisfies (2.3), the energy and surface traction associated with the liquid crystal can be computed using (2.1) and (2.4), respectively. In this paper, we utilize a complex analysis formulation to derive analytical solutions to these equations, we shall introduce this formulation shortly.
2.1. Dimensionless variables
We non-dimensionalize all length scales with respect to a characteristic length scale associated with the immersed body,  $a$, and introduce the dimensionless free energy and traction as
$a$, and introduce the dimensionless free energy and traction as  $\hat {\mathcal {E}}:= \mathcal {E}/K$ and
$\hat {\mathcal {E}}:= \mathcal {E}/K$ and  $\hat {\boldsymbol {t}}:= a^2 \boldsymbol {t}/K$, respectively. The resulting equations are governed by a dimensionless anchoring strength
$\hat {\boldsymbol {t}}:= a^2 \boldsymbol {t}/K$, respectively. The resulting equations are governed by a dimensionless anchoring strength  $w := aW/K$. The dimensionless free energy of the liquid crystal,
$w := aW/K$. The dimensionless free energy of the liquid crystal,  $\hat {\mathcal {E}}$, may now be written as a boundary integral using the divergence theorem,
$\hat {\mathcal {E}}$, may now be written as a boundary integral using the divergence theorem,
 \begin{equation} \hat{\mathcal{E}} = \frac{1}{2}\int_{\partial D}-\theta \frac{\partial \theta}{\partial\hat{\nu}}+w\sin^2(\theta-\phi)\, \mathrm{d} s. \end{equation}
\begin{equation} \hat{\mathcal{E}} = \frac{1}{2}\int_{\partial D}-\theta \frac{\partial \theta}{\partial\hat{\nu}}+w\sin^2(\theta-\phi)\, \mathrm{d} s. \end{equation}Henceforth, we shall only work in these dimensionless variables.
2.2. Complex variables formulation
We introduce the complex coordinate  $z:= x+\mathrm {i} y$ and define the complex director angle as
$z:= x+\mathrm {i} y$ and define the complex director angle as
 \begin{equation} \varOmega(z) := \tau(x,y) - \mathrm{i} \theta(x,y), \end{equation}
\begin{equation} \varOmega(z) := \tau(x,y) - \mathrm{i} \theta(x,y), \end{equation}
where  $\tau (x,y)=\operatorname {Re}\varOmega (z)$ is a harmonic conjugate of
$\tau (x,y)=\operatorname {Re}\varOmega (z)$ is a harmonic conjugate of  $\theta (x,y)=-\operatorname {Im}\varOmega (z)$ (i.e.
$\theta (x,y)=-\operatorname {Im}\varOmega (z)$ (i.e.  $\theta _x=\tau _y$ and
$\theta _x=\tau _y$ and  $\theta _y=-\tau _x$). The gradient components of the director angle,
$\theta _y=-\tau _x$). The gradient components of the director angle,  $\boldsymbol {\nabla }\theta =(\theta _x,\theta _y)$, are related to the complex angle above via
$\boldsymbol {\nabla }\theta =(\theta _x,\theta _y)$, are related to the complex angle above via
 \begin{equation} \theta_x - \mathrm{i} \theta_y = \mathrm{i} \varOmega'(z). \end{equation}
\begin{equation} \theta_x - \mathrm{i} \theta_y = \mathrm{i} \varOmega'(z). \end{equation} Since  $\theta (x,y)$ is harmonic in
$\theta (x,y)$ is harmonic in  $D$,
$D$,  $\theta _x-\mathrm {i}\theta _y$ must be holomorphic in
$\theta _x-\mathrm {i}\theta _y$ must be holomorphic in  $D$ and
$D$ and  $\varOmega (z)$ is at least locally holomorphic. In general,
$\varOmega (z)$ is at least locally holomorphic. In general,  $\varOmega$ may not be single-valued around the body, thus the period around
$\varOmega$ may not be single-valued around the body, thus the period around  $\partial D$ must be defined, that is
$\partial D$ must be defined, that is
 \begin{equation} \oint_{\partial D} \mathrm{d} \varOmega \equiv \frac{1}{\mathrm{i}}\int_{\partial D}\theta_x -\mathrm{i} \theta_y \mathrm{d} z = \varUpsilon-2{\rm \pi}\mathrm{i} M, \end{equation}
\begin{equation} \oint_{\partial D} \mathrm{d} \varOmega \equiv \frac{1}{\mathrm{i}}\int_{\partial D}\theta_x -\mathrm{i} \theta_y \mathrm{d} z = \varUpsilon-2{\rm \pi}\mathrm{i} M, \end{equation}
for some given real constant  $\varUpsilon$ and half-integer
$\varUpsilon$ and half-integer  $M$. Note that
$M$. Note that  $M$ corresponds to the topological charge of the body,
$M$ corresponds to the topological charge of the body,  $\partial D$.
$\partial D$.
In these complex variables, the bulk pointing normal vector,  $\boldsymbol {\hat {\nu }}$, is represented as
$\boldsymbol {\hat {\nu }}$, is represented as  $y_s-\mathrm {i} x_s$ and the normal derivative of the director angle is written as
$y_s-\mathrm {i} x_s$ and the normal derivative of the director angle is written as  $\theta _{\nu }=\operatorname {Re}[\varOmega '(z)z_s]$. The boundary condition (2.3) is equivalent to a constraint on
$\theta _{\nu }=\operatorname {Re}[\varOmega '(z)z_s]$. The boundary condition (2.3) is equivalent to a constraint on  $\varOmega (z)$,
$\varOmega (z)$,
 \begin{equation} \left(|\mathrm{e}^{\varOmega(z)}|^2\right)_s+w\operatorname{Im}\left[ \mathrm{e}^{2\mathrm{i}\phi}\, \mathrm{e}^{2\varOmega(z)}\right]=0\quad \text{on }\partial D. \end{equation}
\begin{equation} \left(|\mathrm{e}^{\varOmega(z)}|^2\right)_s+w\operatorname{Im}\left[ \mathrm{e}^{2\mathrm{i}\phi}\, \mathrm{e}^{2\varOmega(z)}\right]=0\quad \text{on }\partial D. \end{equation} For example,  $\varOmega (z)=-\mathrm {i}\alpha$ corresponds to a director angle
$\varOmega (z)=-\mathrm {i}\alpha$ corresponds to a director angle  $\theta (x,y)=\alpha$ uniform in space; the principal-value logarithm
$\theta (x,y)=\alpha$ uniform in space; the principal-value logarithm  $\varOmega (z) = -M\log (\mathrm {e}^{\mathrm {i}\alpha }z)$ corresponds to an isolated defect of topological charge
$\varOmega (z) = -M\log (\mathrm {e}^{\mathrm {i}\alpha }z)$ corresponds to an isolated defect of topological charge  $M$ located at
$M$ located at  $z=0$ and oriented with
$z=0$ and oriented with  $\arg z= \alpha$; and
$\arg z= \alpha$; and  $\varOmega (z) = [{\rm \pi} /(2\mathrm {i}\log R)-1]\log z$ corresponds to a nematic contained in the annulus
$\varOmega (z) = [{\rm \pi} /(2\mathrm {i}\log R)-1]\log z$ corresponds to a nematic contained in the annulus  $1<|z|< R$ with strong normal and tangential anchoring on the inner (
$1<|z|< R$ with strong normal and tangential anchoring on the inner ( $|z|=1$) and outer (
$|z|=1$) and outer ( $|z|=R$) boundaries, respectively. This last configuration is often called the ‘magical spiral’ (de Gennes & Prost Reference de Gennes and Prost1993) and has
$|z|=R$) boundaries, respectively. This last configuration is often called the ‘magical spiral’ (de Gennes & Prost Reference de Gennes and Prost1993) and has  $\varUpsilon = {\rm \pi}^2/\log R$ and
$\varUpsilon = {\rm \pi}^2/\log R$ and  $M=1$ in (2.8).
$M=1$ in (2.8).
The net free energy, (2.5), may now be written in terms of  $\varOmega (z)$ as
$\varOmega (z)$ as
 \begin{equation} \hat{\mathcal{E}} = \frac{1}{4}\oint_{\partial D}\operatorname{Im}\left[ \left(\varOmega(z)- \overline{\varOmega(z)}\right) \varOmega'(z)z_s\right]+ w \operatorname{Re}\left[1-\mathrm{e}^{\varOmega(z)-\overline{\varOmega(z)}}\, \mathrm{e}^{2\mathrm{i}\phi} \right]\, \mathrm{d} s, \end{equation}
\begin{equation} \hat{\mathcal{E}} = \frac{1}{4}\oint_{\partial D}\operatorname{Im}\left[ \left(\varOmega(z)- \overline{\varOmega(z)}\right) \varOmega'(z)z_s\right]+ w \operatorname{Re}\left[1-\mathrm{e}^{\varOmega(z)-\overline{\varOmega(z)}}\, \mathrm{e}^{2\mathrm{i}\phi} \right]\, \mathrm{d} s, \end{equation}
where the bar denotes a complex conjugate. Additionally, the surface traction  $\hat {\boldsymbol {t}}\equiv (\hat {t}_x,\hat {t}_y)$ given by (2.4) may be written as
$\hat {\boldsymbol {t}}\equiv (\hat {t}_x,\hat {t}_y)$ given by (2.4) may be written as
 \begin{equation} \hat{t}_x-\mathrm{i} \hat{t}_y= \frac{1}{2\mathrm{i}}\varOmega'(z)^2\frac{\partial z}{\partial s} +\frac{w}{8}\left[(2+\mathrm{e}^{{-}2\mathrm{i}\phi}\, \mathrm{e}^{\overline{\varOmega(z)}-\varOmega(z)}-3\,\mathrm{e}^{2\mathrm{i}\phi}\, \mathrm{e}^{\varOmega(z)-\overline{\varOmega(z)}})\frac{\partial \bar z}{\partial s}\right]_s. \end{equation}
\begin{equation} \hat{t}_x-\mathrm{i} \hat{t}_y= \frac{1}{2\mathrm{i}}\varOmega'(z)^2\frac{\partial z}{\partial s} +\frac{w}{8}\left[(2+\mathrm{e}^{{-}2\mathrm{i}\phi}\, \mathrm{e}^{\overline{\varOmega(z)}-\varOmega(z)}-3\,\mathrm{e}^{2\mathrm{i}\phi}\, \mathrm{e}^{\varOmega(z)-\overline{\varOmega(z)}})\frac{\partial \bar z}{\partial s}\right]_s. \end{equation} Overall, given a locally holomorphic function,  $\varOmega (z)$, which satisfies the weak anchoring condition (2.9) with a period (2.8), the liquid crystal director angle,
$\varOmega (z)$, which satisfies the weak anchoring condition (2.9) with a period (2.8), the liquid crystal director angle,  $\theta (x,y)=-\operatorname {Im}\varOmega (z)$; free energy, (2.10); and surface traction, (2.11), can all be determined.
$\theta (x,y)=-\operatorname {Im}\varOmega (z)$; free energy, (2.10); and surface traction, (2.11), can all be determined.
2.3. Net body force and torque
The net dimensionless force,  $(\hat {F}_x,\hat {F}_y)$, and torque,
$(\hat {F}_x,\hat {F}_y)$, and torque,  $\hat {T}$, acting on the body are found by integrating the surface traction,
$\hat {T}$, acting on the body are found by integrating the surface traction,  $(\hat {t}_x,\hat {t}_y)$ given by (2.11), and surface moment,
$(\hat {t}_x,\hat {t}_y)$ given by (2.11), and surface moment,  $x \hat {t}_y-y\hat {t}_x$, around
$x \hat {t}_y-y\hat {t}_x$, around  $\partial D$, respectively. Integrating by parts, and imposing the boundary condition (2.9) and the fact that
$\partial D$, respectively. Integrating by parts, and imposing the boundary condition (2.9) and the fact that  $\exp [2\mathrm {i}(\theta -\phi )]\equiv \exp (\bar \varOmega -\varOmega -2\mathrm {i}\phi )$ is single-valued, results in the complex contour integrals
$\exp [2\mathrm {i}(\theta -\phi )]\equiv \exp (\bar \varOmega -\varOmega -2\mathrm {i}\phi )$ is single-valued, results in the complex contour integrals
 $$\begin{gather} \hat{F}_x-\mathrm{i} \hat{F}_y =\oint_{\partial D} \hat{t}_x-\mathrm{i} \hat{t}_y\, \mathrm{d} s = \frac{1}{2\mathrm{i}}\oint_{\partial D} \varOmega'(z)^2\, \mathrm{d} z, \end{gather}$$
$$\begin{gather} \hat{F}_x-\mathrm{i} \hat{F}_y =\oint_{\partial D} \hat{t}_x-\mathrm{i} \hat{t}_y\, \mathrm{d} s = \frac{1}{2\mathrm{i}}\oint_{\partial D} \varOmega'(z)^2\, \mathrm{d} z, \end{gather}$$and
 $$\begin{gather}\hat{T} =\oint_{\partial D}x \hat{t}_y -y \hat{t}_x\, \mathrm{d} s =\frac{1}{2}\operatorname{Re}\left[\oint_{\partial D} z\varOmega'(z)^2\, \mathrm{d} z\right]+\varUpsilon, \end{gather}$$
$$\begin{gather}\hat{T} =\oint_{\partial D}x \hat{t}_y -y \hat{t}_x\, \mathrm{d} s =\frac{1}{2}\operatorname{Re}\left[\oint_{\partial D} z\varOmega'(z)^2\, \mathrm{d} z\right]+\varUpsilon, \end{gather}$$
where  $\varUpsilon$ is the period defined in (2.8) and the centre of rotation is assumed to be
$\varUpsilon$ is the period defined in (2.8) and the centre of rotation is assumed to be  $z=0$, without loss of generality.
$z=0$, without loss of generality.
Assuming there are no defects within the liquid crystal, i.e.  $\varOmega (z)$ is holomorphic in
$\varOmega (z)$ is holomorphic in  $D$, we are free to deform the integration contours in (2.12) provided they remain outside the body. For a bounded director angle,
$D$, we are free to deform the integration contours in (2.12) provided they remain outside the body. For a bounded director angle,  $\varUpsilon = 0$ and
$\varUpsilon = 0$ and  $\varOmega '(z) \sim -M/z$ as
$\varOmega '(z) \sim -M/z$ as  $|z|\to \infty$ for some half-integer
$|z|\to \infty$ for some half-integer  $M$ corresponding to the topological charge of the body, as introduced in (2.8). Thus, by taking the contours in (2.12) to infinity, we immediately find that there is no net force or torque acting on a immersed connected body when the director angle is bounded (i.e.
$M$ corresponding to the topological charge of the body, as introduced in (2.8). Thus, by taking the contours in (2.12) to infinity, we immediately find that there is no net force or torque acting on a immersed connected body when the director angle is bounded (i.e.  $\hat {F}_x=\hat {F}_y=\hat {T}=0$). Note that a non-zero torque (
$\hat {F}_x=\hat {F}_y=\hat {T}=0$). Note that a non-zero torque ( $\hat {T}\neq 0$) induces a logarithmically growing director angle, that is
$\hat {T}\neq 0$) induces a logarithmically growing director angle, that is  $\theta (z)\equiv -\operatorname {Im}\varOmega (z)\sim M\arg z -\hat {T}\log |z|/[2{\rm \pi} (1-M)]$ as
$\theta (z)\equiv -\operatorname {Im}\varOmega (z)\sim M\arg z -\hat {T}\log |z|/[2{\rm \pi} (1-M)]$ as  $|z|\to \infty$; i.e.
$|z|\to \infty$; i.e.  $\varUpsilon =\hat {T}/(1-M)$ in (2.8).
$\varUpsilon =\hat {T}/(1-M)$ in (2.8).
A non-zero net force or torque on a body at equilibrium requires either a secondary body or the existence of a defect within the liquid crystal. For example, consider the complex director angle  $\varOmega (z)= M\log [(z-\epsilon )/(z+\epsilon )]$ for a half-integer
$\varOmega (z)= M\log [(z-\epsilon )/(z+\epsilon )]$ for a half-integer  $M$. This corresponds to an unconfined director field with two defects at
$M$. This corresponds to an unconfined director field with two defects at  $z=\pm \epsilon$ of topological charge
$z=\pm \epsilon$ of topological charge  $\mp M$, respectively. The net force acting on one of these defects can be computed by integrating
$\mp M$, respectively. The net force acting on one of these defects can be computed by integrating  $\varOmega '(z)^2= 4M^2\epsilon ^2/(z^2-\epsilon ^2)^2$ around a contour only containing said defect, i.e. (2.12a). Cauchy's residue theorem then yields the forces
$\varOmega '(z)^2= 4M^2\epsilon ^2/(z^2-\epsilon ^2)^2$ around a contour only containing said defect, i.e. (2.12a). Cauchy's residue theorem then yields the forces  $(F_x^{\pm },F_y^\pm ) = (\pm {\rm \pi}M^2/\epsilon,0)$ for the defects of charge
$(F_x^{\pm },F_y^\pm ) = (\pm {\rm \pi}M^2/\epsilon,0)$ for the defects of charge  $\pm M$, respectively. We hence find that the defects are attracted to each other with a force proportional to the inverse of the separation distance, and the square of their topological charge (de Gennes & Prost Reference de Gennes and Prost1993; Gartland et al. Reference Gartland, Sonnet and Virga2002; Harth & Stannarius Reference Harth and Stannarius2020), though their mobilities and migration speeds in a dynamic setting can differ substantially (Tóth, Denniston & Yeomans Reference Tóth, Denniston and Yeomans2002; Tang & Selinger Reference Tang and Selinger2019).
$\pm M$, respectively. We hence find that the defects are attracted to each other with a force proportional to the inverse of the separation distance, and the square of their topological charge (de Gennes & Prost Reference de Gennes and Prost1993; Gartland et al. Reference Gartland, Sonnet and Virga2002; Harth & Stannarius Reference Harth and Stannarius2020), though their mobilities and migration speeds in a dynamic setting can differ substantially (Tóth, Denniston & Yeomans Reference Tóth, Denniston and Yeomans2002; Tang & Selinger Reference Tang and Selinger2019).
Analogy with d'Alembert's paradox. A classical and paradoxical result in potential fluid flow states that an inviscid fluid presents no resistance to a body which moves through it with steady translational motion (Batchelor Reference Batchelor1967). The resolution of this paradox is found with the incorporation of a viscous boundary layer on the body, which promotes the separation of vorticity from the surface in its wake. Here, we find an analogous result: there is no net force or torque acting on a immersed connected body when the director angle is bounded (i.e.  $\hat {F}_x=\hat {F}_y=\hat {T}=0$). Unlike in potential flow theory, however, this result does not challenge our physical experience, and thus we do not seek further resolution in this setting.
$\hat {F}_x=\hat {F}_y=\hat {T}=0$). Unlike in potential flow theory, however, this result does not challenge our physical experience, and thus we do not seek further resolution in this setting.
Analogy with Stokes’ paradox. Another classical fluid mechanical paradox appears in Stokes flow. Namely that the flow due to a cylinder upon which there is a non-zero force is logarithmic in the distance from the body, and so the fluid velocity in an infinite domain is unbounded (Batchelor Reference Batchelor1967). The resolution of this apparent paradox is found by the reintroduction of inertial effects (e.g. via the Oseen equations). The analogous result here is that the director angle far from a body immersed in a LC with a non-zero torque is, similarly, logarithmic, and thus the associated elastic energy is unbounded. The question of solving for the equilibrium director field around a two-dimensional body with a non-zero torque is therefore similarly ill-posed. Reintroducing LC dynamics would regularize this singular behaviour by presenting a finite speed of propagation of information from near the body outward towards infinity.
3. Effective boundary technique for finite anchoring strength
While infinite anchoring ( $w=\infty$) is mathematically appealing, real anchoring energies are finite. We now turn to the case of large, but finite, anchoring strengths. As
$w=\infty$) is mathematically appealing, real anchoring energies are finite. We now turn to the case of large, but finite, anchoring strengths. As  $w\to \infty$, the strong anchoring boundary condition is recovered from (2.9), i.e.
$w\to \infty$, the strong anchoring boundary condition is recovered from (2.9), i.e.
 \begin{equation} \operatorname{Im} \,\mathrm{e}^{\varOmega(z)+\mathrm{i}\phi}=O(1/w)\quad \text{on }\partial D. \end{equation}
\begin{equation} \operatorname{Im} \,\mathrm{e}^{\varOmega(z)+\mathrm{i}\phi}=O(1/w)\quad \text{on }\partial D. \end{equation}
This boundary condition is invariant under a conformal map, thus the corresponding problem can be solved using a wide range of complex analysis tools (Ablowitz & Fokas Reference Ablowitz and Fokas2003). However, solutions to these Dirichlet problems are known to require singularities at boundaries, which correspond to ‘surface defects’ within the liquid crystal. This is problematic as defects give rise to an infinite free energy. This issue is often resolved by introducing a ‘melting region’ local to the defects (de Gennes & Prost Reference de Gennes and Prost1993), or by studying a more general alignment tensor theory in which this melting from a nematic to isotropic phase is tracked by a Maier–Saupe scalar order parameter (Hess Reference Hess1975; Sonnet, Kilian & Hess Reference Sonnet, Kilian and Hess1995; Stark & Lubensky Reference Stark and Lubensky2003). Here, we instead seek a correction to the strong anchoring constraint as  $w\to \infty$.
$w\to \infty$.
For convenience, we denote  $\varPhi (s):= \mathrm {e}^{\varOmega (z)+\mathrm {i}\phi }$, which is defined for
$\varPhi (s):= \mathrm {e}^{\varOmega (z)+\mathrm {i}\phi }$, which is defined for  $z(s)\in \partial D$. The boundary condition, (2.9), can then be written as the nonlinear constraint
$z(s)\in \partial D$. The boundary condition, (2.9), can then be written as the nonlinear constraint
 \begin{equation} \operatorname{Re} \varPhi(s)\operatorname{Re} \varPhi'(s)+\operatorname{Im} \varPhi(s)\operatorname{Im} \varPhi'(s)+w\operatorname{Im} \varPhi(s)\operatorname{Re} \varPhi(s)=0. \end{equation}
\begin{equation} \operatorname{Re} \varPhi(s)\operatorname{Re} \varPhi'(s)+\operatorname{Im} \varPhi(s)\operatorname{Im} \varPhi'(s)+w\operatorname{Im} \varPhi(s)\operatorname{Re} \varPhi(s)=0. \end{equation}
Using the fact that  $\operatorname {Im} \varPhi = O(1/w)$ as
$\operatorname {Im} \varPhi = O(1/w)$ as  $w\to \infty$, i.e. (3.1), we immediately find that
$w\to \infty$, i.e. (3.1), we immediately find that
 \begin{equation} \operatorname{Im}\varPhi(s)+\frac{1}{w}\operatorname{Re}\varPhi'(s)=O(1/w^3), \end{equation}
\begin{equation} \operatorname{Im}\varPhi(s)+\frac{1}{w}\operatorname{Re}\varPhi'(s)=O(1/w^3), \end{equation}
as  $w\to \infty$.
$w\to \infty$.
The linear constraint (3.3) contains the desired correction to the strong anchoring condition when the anchoring strength is large, but finite. This constraint is analogous to a Robin boundary condition for  $\operatorname {Im} \varPhi$; however, unlike its Dirichlet counterpart (when
$\operatorname {Im} \varPhi$; however, unlike its Dirichlet counterpart (when  $w=\infty$), it is not preserved under a conformal map and, thus, the most appealing tools of complex analysis do not immediately apply.
$w=\infty$), it is not preserved under a conformal map and, thus, the most appealing tools of complex analysis do not immediately apply.
It is known, however, that the configuration of a nematic with weak anchoring (finite  $w$) near a flat boundary is equivalent to that of a nematic with strong anchoring (
$w$) near a flat boundary is equivalent to that of a nematic with strong anchoring ( $w=\infty$) on a different surface internal to the boundary, which is recessed from the surface by the extrapolation length
$w=\infty$) on a different surface internal to the boundary, which is recessed from the surface by the extrapolation length  $K/W\equiv a/w$ (Rapini & Papoular Reference Rapini and Papoular1969; de Gennes & Prost Reference de Gennes and Prost1993). Below, we use this idea to show that imposing the finite anchoring constraint (3.3) on
$K/W\equiv a/w$ (Rapini & Papoular Reference Rapini and Papoular1969; de Gennes & Prost Reference de Gennes and Prost1993). Below, we use this idea to show that imposing the finite anchoring constraint (3.3) on  $\partial D$ is mathematically equivalent to imposing the strong anchoring constraint (3.1) on some ‘effective domain’ boundary,
$\partial D$ is mathematically equivalent to imposing the strong anchoring constraint (3.1) on some ‘effective domain’ boundary,  $\partial D_w$, which is the physical boundary moved by the extrapolation length. The effective boundary,
$\partial D_w$, which is the physical boundary moved by the extrapolation length. The effective boundary,  $\partial D_w$, is sketched in figure 1.
$\partial D_w$, is sketched in figure 1.
The above result follows from noting that (3.3) can be written as
 \begin{equation} \operatorname{Im}\varPhi(s+\mathrm{i}/w)=O(1/w^3), \end{equation}
\begin{equation} \operatorname{Im}\varPhi(s+\mathrm{i}/w)=O(1/w^3), \end{equation}
where we define  $\varPhi (s+\mathrm {i}/w):= \varPhi (s)+\varPhi '(s)\mathrm {i}/w- \varPhi ''(s)/(2w^2) +O(1/w^3)$. Substituting in
$\varPhi (s+\mathrm {i}/w):= \varPhi (s)+\varPhi '(s)\mathrm {i}/w- \varPhi ''(s)/(2w^2) +O(1/w^3)$. Substituting in  $\varPhi =\mathrm {e}^{\varOmega (z)+\mathrm {i}\phi }$ then yields the boundary condition
$\varPhi =\mathrm {e}^{\varOmega (z)+\mathrm {i}\phi }$ then yields the boundary condition
 \begin{equation} \operatorname{Im} \, \mathrm{e}^{\varOmega(z)+\mathrm{i}\tilde{\phi}} = O(1/w^3)\quad \text{on }\partial D_{w}, \end{equation}
\begin{equation} \operatorname{Im} \, \mathrm{e}^{\varOmega(z)+\mathrm{i}\tilde{\phi}} = O(1/w^3)\quad \text{on }\partial D_{w}, \end{equation}
where  $\tilde {\phi }(s):= \phi (s)-\phi ''(s)/(2w^2) + O(1/w^3)$ and
$\tilde {\phi }(s):= \phi (s)-\phi ''(s)/(2w^2) + O(1/w^3)$ and  $\partial D_w$ is the boundary
$\partial D_w$ is the boundary  $\partial D$ displaced by
$\partial D$ displaced by  $-\boldsymbol {\hat {\nu }}(s)/w-\boldsymbol {\hat {s}}'(s)/(2w^2) +O(1/w^3)$ for the unit normal and tangent vectors
$-\boldsymbol {\hat {\nu }}(s)/w-\boldsymbol {\hat {s}}'(s)/(2w^2) +O(1/w^3)$ for the unit normal and tangent vectors  $\boldsymbol {\hat {\nu }}(s)=-\boldsymbol {x}'(s)^\perp$ and
$\boldsymbol {\hat {\nu }}(s)=-\boldsymbol {x}'(s)^\perp$ and  $\boldsymbol {\hat {s}}(s)=\boldsymbol {x}'(s)$, respectively – i.e.
$\boldsymbol {\hat {s}}(s)=\boldsymbol {x}'(s)$, respectively – i.e.  $z(s)\in \partial D$ is mapped to
$z(s)\in \partial D$ is mapped to  $z(s+\mathrm {i}/w)\in \partial D_w$.
$z(s+\mathrm {i}/w)\in \partial D_w$.
Above, we have implicitly assumed that the boundary curve,  $\partial D$, is non-singular; however, domains with corners are ubiquitous in the literature (Lapointe et al. Reference Lapointe, Mason and Smalyukh2009; Davidson & Mottram Reference Davidson and Mottram2012; Muševič Reference Muševič2017). A local asymptotic analysis shows that mapping a corner in
$\partial D$, is non-singular; however, domains with corners are ubiquitous in the literature (Lapointe et al. Reference Lapointe, Mason and Smalyukh2009; Davidson & Mottram Reference Davidson and Mottram2012; Muševič Reference Muševič2017). A local asymptotic analysis shows that mapping a corner in  $\partial D$ to a similar corner in
$\partial D$ to a similar corner in  $\partial D_w$ is accurate up to
$\partial D_w$ is accurate up to  $O(1/w^3)$ as
$O(1/w^3)$ as  $w\to \infty$ – i.e. the same order of accuracy as (3.5).
$w\to \infty$ – i.e. the same order of accuracy as (3.5).
Overall, we have shown that finding a locally holomorphic function in  $D$ that satisfies (2.9) on
$D$ that satisfies (2.9) on  $\partial D$ is mathematically equivalent to finding a locally holomorphic function in
$\partial D$ is mathematically equivalent to finding a locally holomorphic function in  $D_w$ that satisfies (3.5) on
$D_w$ that satisfies (3.5) on  $\partial D_w$, up to
$\partial D_w$, up to  $O(1/w^3)$ as
$O(1/w^3)$ as  $w\to \infty$. Here, we have analytically continued
$w\to \infty$. Here, we have analytically continued  $\varOmega (z)$ inside the narrow region
$\varOmega (z)$ inside the narrow region  $D_w\setminus D$. It should be noted that the modified anchoring angle in (3.5), i.e.
$D_w\setminus D$. It should be noted that the modified anchoring angle in (3.5), i.e.  $\tilde \phi (s)\sim \phi (s)-\phi ''(s)/(2w^2)$, may differ from the original anchoring angle in (2.9), i.e.
$\tilde \phi (s)\sim \phi (s)-\phi ''(s)/(2w^2)$, may differ from the original anchoring angle in (2.9), i.e.  $\phi (s)$.
$\phi (s)$.
The equivalence of these two problems shows that any defects on the immersed boundary for  $w=\infty$ are located inside the boundary for finite
$w=\infty$ are located inside the boundary for finite  $w$, thus regularizing the energy. Furthermore, it provides a method for solving the finite anchoring problem on a domain
$w$, thus regularizing the energy. Furthermore, it provides a method for solving the finite anchoring problem on a domain  $D$: first one constructs the effective domain,
$D$: first one constructs the effective domain,  $D_w$, via displacing
$D_w$, via displacing  $\partial D$ by
$\partial D$ by  $-\boldsymbol {\hat {\nu }}(s)/w-\boldsymbol {\hat {s}}'(s)/(2w^2) +O(1/w^3)$, whilst ensuring any corner angles are preserved; then one solves the strongly anchored problem on
$-\boldsymbol {\hat {\nu }}(s)/w-\boldsymbol {\hat {s}}'(s)/(2w^2) +O(1/w^3)$, whilst ensuring any corner angles are preserved; then one solves the strongly anchored problem on  $D_w$, for which the standard techniques of complex analysis, in particular conformal mapping, may be used. (As a first approximation, one can instead move the boundary a distance
$D_w$, for which the standard techniques of complex analysis, in particular conformal mapping, may be used. (As a first approximation, one can instead move the boundary a distance  $1/w$ in the normal direction, however, the solution will then only be accurate to
$1/w$ in the normal direction, however, the solution will then only be accurate to  $O(1/w^2)$ as
$O(1/w^2)$ as  $w\to \infty$. In some cases, higher-order terms are required for computing the net energy, (2.10), and force, (2.12)).
$w\to \infty$. In some cases, higher-order terms are required for computing the net energy, (2.10), and force, (2.12)).
The above ‘effective boundary technique’ can also be understood by considering the mapping from the physical domain,  $D$, with boundary condition (2.9), to the effective domain,
$D$, with boundary condition (2.9), to the effective domain,  $D_w$, with boundary condition (3.5), as a conformal map. The transformation of the boundary condition can then be interpreted (at least for analytic boundaries) as an embedding in the Schwarz function of the boundary curve (Shapiro Reference Shapiro1992; Ablowitz & Fokas Reference Ablowitz and Fokas2003). Such encoding of information using Schwarz functions has been recently studied in the context of travelling water waves (Crowdy Reference Crowdy2023).
$D_w$, with boundary condition (3.5), as a conformal map. The transformation of the boundary condition can then be interpreted (at least for analytic boundaries) as an embedding in the Schwarz function of the boundary curve (Shapiro Reference Shapiro1992; Ablowitz & Fokas Reference Ablowitz and Fokas2003). Such encoding of information using Schwarz functions has been recently studied in the context of travelling water waves (Crowdy Reference Crowdy2023).
3.1. Tangential (homogeneous) anchoring and complex potentials
Although the results presented thus far hold for any anchoring angle,  $\phi$, we are particularly interested in the case of tangential (homogeneous) anchoring with
$\phi$, we are particularly interested in the case of tangential (homogeneous) anchoring with  $\phi$ being tangent to
$\phi$ being tangent to  $\partial D$. For tangential anchoring,
$\partial D$. For tangential anchoring,  $\phi (s) := \arg z'(s)\mod {\rm \pi}$ for
$\phi (s) := \arg z'(s)\mod {\rm \pi}$ for  $z(s)\in \partial D$. Furthermore, since
$z(s)\in \partial D$. Furthermore, since
 \begin{equation} \arg\left[z'(s)+\frac{\mathrm{i}}{w}z''(s)-\frac{1}{2w^2}z'''(s)\right]= \phi(s)-\frac{1}{2w^2}\phi''(s)+O(1/w^3)\mod{\rm \pi}, \end{equation}
\begin{equation} \arg\left[z'(s)+\frac{\mathrm{i}}{w}z''(s)-\frac{1}{2w^2}z'''(s)\right]= \phi(s)-\frac{1}{2w^2}\phi''(s)+O(1/w^3)\mod{\rm \pi}, \end{equation}
as  $w\to \infty$, the modified anchoring angle,
$w\to \infty$, the modified anchoring angle,  $\tilde \phi (s)\sim \phi (s)-\phi ''(s)/(2w^2)$, is tangent to the effective domain, i.e.
$\tilde \phi (s)\sim \phi (s)-\phi ''(s)/(2w^2)$, is tangent to the effective domain, i.e.  $\tilde \phi (s) := \arg \tilde {z}'(s) \mod {\rm \pi}$ for
$\tilde \phi (s) := \arg \tilde {z}'(s) \mod {\rm \pi}$ for  $\tilde {z}(s)\in \partial D_w$. With this, the effective boundary technique (derived in § 3) says that imposing weak tangential anchoring on
$\tilde {z}(s)\in \partial D_w$. With this, the effective boundary technique (derived in § 3) says that imposing weak tangential anchoring on  $\partial D$ is equivalent to imposing strong tangential anchoring on
$\partial D$ is equivalent to imposing strong tangential anchoring on  $\partial D_w$ up to
$\partial D_w$ up to  $O(1/w^3)$ as
$O(1/w^3)$ as  $w\to \infty$. (This equivalency also holds for normal, homeotropic, anchoring with
$w\to \infty$. (This equivalency also holds for normal, homeotropic, anchoring with  $\phi (s)={\rm \pi} /2+\arg z'(s) \mod {\rm \pi}$ for
$\phi (s)={\rm \pi} /2+\arg z'(s) \mod {\rm \pi}$ for  $z(s)\in \partial D$ or
$z(s)\in \partial D$ or  $\partial D_w$. Moreover, since a homeotropic director field is perpendicular to its homogeneous counterpart, one can transform a homeotropic anchoring problem into a homogeneous anchoring problem by taking
$\partial D_w$. Moreover, since a homeotropic director field is perpendicular to its homogeneous counterpart, one can transform a homeotropic anchoring problem into a homogeneous anchoring problem by taking  $\varOmega _{homeo}(z) = \varOmega _{homo}(z)+\mathrm {i}{\rm \pi} /2$.)
$\varOmega _{homeo}(z) = \varOmega _{homo}(z)+\mathrm {i}{\rm \pi} /2$.)
Strong tangential anchoring is reminiscent of a vanishing boundary-flux problem in potential theory with  $\varOmega (z)$ corresponding to the logarithm of the derivative of a complex potential
$\varOmega (z)$ corresponding to the logarithm of the derivative of a complex potential  $f(z)$, i.e.
$f(z)$, i.e.  $\varOmega (z) = \log f'(z)$ (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003); for example,
$\varOmega (z) = \log f'(z)$ (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003); for example,  $f(z)=z \mathrm {e}^{-\mathrm {i} \alpha }$ corresponds to a director angle
$f(z)=z \mathrm {e}^{-\mathrm {i} \alpha }$ corresponds to a director angle  $\theta =\alpha$ uniform in space. However, the problem here differs from the typical potential problem since
$\theta =\alpha$ uniform in space. However, the problem here differs from the typical potential problem since  $\varOmega (z)$ is not necessarily single-valued due to the periods in (2.8).
$\varOmega (z)$ is not necessarily single-valued due to the periods in (2.8).
Inspired by the above discussion, it is natural to remove the multivaluedness of  $\varOmega (z)$ then introduce an analogous complex potential. That is, we write
$\varOmega (z)$ then introduce an analogous complex potential. That is, we write
 \begin{equation} \varOmega(z) = \log f'(z) + g(z), \end{equation}
\begin{equation} \varOmega(z) = \log f'(z) + g(z), \end{equation}
where  $g(z)$ is any locally holomorphic function that accounts for the period in (2.8), i.e.
$g(z)$ is any locally holomorphic function that accounts for the period in (2.8), i.e.
 \begin{equation} \oint_{\partial D_w} \mathrm{d} g = \varUpsilon - 2{\rm \pi} \mathrm{i} M, \end{equation}
\begin{equation} \oint_{\partial D_w} \mathrm{d} g = \varUpsilon - 2{\rm \pi} \mathrm{i} M, \end{equation}
and  $f'(z)$ is a single-valued holomorphic function that accounts for the boundary condition on
$f'(z)$ is a single-valued holomorphic function that accounts for the boundary condition on  $\partial D_w$, i.e. (2.9). By writing the complex director field in this form, we shall recover a formulation for both
$\partial D_w$, i.e. (2.9). By writing the complex director field in this form, we shall recover a formulation for both  $f(z)$ and
$f(z)$ and  $g(z)$ which is ubiquitous within the potential theory literature. This will allow for the use of known analytical solutions in the case of tangential anchoring (in §§ 4 and 5).
$g(z)$ which is ubiquitous within the potential theory literature. This will allow for the use of known analytical solutions in the case of tangential anchoring (in §§ 4 and 5).
If we restrict our attention to the case when  $M=0$ in (2.8) (i.e. the body,
$M=0$ in (2.8) (i.e. the body,  $\partial D$, has a vanishing topological charge), we then have enough freedom to choose
$\partial D$, has a vanishing topological charge), we then have enough freedom to choose  $g(z)$ such that
$g(z)$ such that
 \begin{equation} \operatorname{Im} g=0\quad \text{on }\partial D_w. \end{equation}
\begin{equation} \operatorname{Im} g=0\quad \text{on }\partial D_w. \end{equation}The boundary condition (3.5) can then be integrated once to obtain
 \begin{equation} \operatorname{Im} f= O(1/w^3)\quad \text{on }\partial D_{w}, \end{equation}
\begin{equation} \operatorname{Im} f= O(1/w^3)\quad \text{on }\partial D_{w}, \end{equation}
where we have fixed the gauge of  $f$ such that the integration constant vanishes. However, the boundary condition (3.10) does not necessarily yield a unique solution since, although
$f$ such that the integration constant vanishes. However, the boundary condition (3.10) does not necessarily yield a unique solution since, although  $f'(z)$ is single-valued, its primitive may be multivalued. Uniqueness is restored by specifying the period of
$f'(z)$ is single-valued, its primitive may be multivalued. Uniqueness is restored by specifying the period of  $f(z)$ around
$f(z)$ around  $\partial D$, i.e.
$\partial D$, i.e.
 \begin{equation} \oint_{\partial D} \mathrm{d} f =\varGamma, \end{equation}
\begin{equation} \oint_{\partial D} \mathrm{d} f =\varGamma, \end{equation}
for some real constant  $\varGamma$. This period is analogous to specifying a constant circulation around a body in potential theory (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003; Vitelli & Nelson Reference Vitelli and Nelson2006; Crowdy Reference Crowdy2020), whilst here it selects the locations of topological defects on the surface, as we shall see.
$\varGamma$. This period is analogous to specifying a constant circulation around a body in potential theory (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003; Vitelli & Nelson Reference Vitelli and Nelson2006; Crowdy Reference Crowdy2020), whilst here it selects the locations of topological defects on the surface, as we shall see.
Overall, when  $M= 0$, the homogeneous anchoring problem comes down to finding two locally holomorphic potentials,
$M= 0$, the homogeneous anchoring problem comes down to finding two locally holomorphic potentials,  $g(z)$ and
$g(z)$ and  $f(z)$, which satisfy the boundary conditions (3.9) and (3.10) with given periods (2.8) and (3.11), respectively. Although this formulation may appear daunting,
$f(z)$, which satisfy the boundary conditions (3.9) and (3.10) with given periods (2.8) and (3.11), respectively. Although this formulation may appear daunting,  $g(z)$ and
$g(z)$ and  $f(z)$ are both equivalent to a complex potential in a typical potential theory problem (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003; Crowdy Reference Crowdy2020). We can, thus, utilize the vast number of results which already exist within the literature.
$f(z)$ are both equivalent to a complex potential in a typical potential theory problem (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003; Crowdy Reference Crowdy2020). We can, thus, utilize the vast number of results which already exist within the literature.
4. Example 1: immersed cylinder with tangential anchoring
Consider a liquid crystal outside a cylinder with dimensionless unit radius, we denote this region  $D$. The liquid crystal is assumed to be oriented with the
$D$. The liquid crystal is assumed to be oriented with the  $x$-axis in the far-field, thus
$x$-axis in the far-field, thus  $\varOmega (z)\to 0$ as
$\varOmega (z)\to 0$ as  $|z|\to \infty$, and subject to finite tangential (homogeneous) anchoring on the cylinder, i.e.
$|z|\to \infty$, and subject to finite tangential (homogeneous) anchoring on the cylinder, i.e.  $\varOmega (z)$ satisfies (3.3) with
$\varOmega (z)$ satisfies (3.3) with  $\phi =\arg z'(s)\mod {\rm \pi}$ on
$\phi =\arg z'(s)\mod {\rm \pi}$ on  $|z|=1$. (Although we have assumed finite anchoring with
$|z|=1$. (Although we have assumed finite anchoring with  $w\gg 1$, the solution derived in this section ultimately satisfies the weak anchoring condition, (2.9), for any
$w\gg 1$, the solution derived in this section ultimately satisfies the weak anchoring condition, (2.9), for any  $w\geq 0$.) This configuration is plotted in figure 2.
$w\geq 0$.) This configuration is plotted in figure 2.

Figure 2. (Example 1.) Two-dimensional liquid crystal outside a unit cylinder ( $\partial D$, black solid curve) subject to finite tangential anchoring. The effective domain boundary is a shrunken cylinder of radius
$\partial D$, black solid curve) subject to finite tangential anchoring. The effective domain boundary is a shrunken cylinder of radius  $\rho (w)$ (
$\rho (w)$ ( $\partial D_w$, black dotted curve). The director field inside the effective domain, (4.3), is shown as faded blue curves for
$\partial D_w$, black dotted curve). The director field inside the effective domain, (4.3), is shown as faded blue curves for  $w=10$ and period which minimizes the free energy,
$w=10$ and period which minimizes the free energy,  $\varGamma =0$.
$\varGamma =0$.
Since  $\varOmega (z)$ is holomorphic in
$\varOmega (z)$ is holomorphic in  $D$, the contour in the period-defining integral (2.8) can be deformed freely within the liquid crystal. Sending this contour off to infinity and imposing the far-field conditions, it follows that
$D$, the contour in the period-defining integral (2.8) can be deformed freely within the liquid crystal. Sending this contour off to infinity and imposing the far-field conditions, it follows that  $\varOmega (z)$ must be single-valued with the periods in (2.8) vanishing (i.e.
$\varOmega (z)$ must be single-valued with the periods in (2.8) vanishing (i.e.  $\varUpsilon =M=0$). Following § 3.1, we introduce a locally holomorphic potential,
$\varUpsilon =M=0$). Following § 3.1, we introduce a locally holomorphic potential,  $f(z)$, defined such that
$f(z)$, defined such that  $\varOmega (z)=\log f'(z)$ and with its period around the cylinder as yet free, i.e.
$\varOmega (z)=\log f'(z)$ and with its period around the cylinder as yet free, i.e.  $\varGamma$ in (3.11). (Note that
$\varGamma$ in (3.11). (Note that  $g(z)$ is omitted here since
$g(z)$ is omitted here since  $\varOmega (z)$ is already single-valued.)
$\varOmega (z)$ is already single-valued.)
The first step of the effective boundary technique is to construct the effective domain,  $D_w$. Since the normal and tangent vectors of the cylinder are
$D_w$. Since the normal and tangent vectors of the cylinder are  $\boldsymbol {\hat {\nu }}(s)=(\cos s,\sin s)$ and
$\boldsymbol {\hat {\nu }}(s)=(\cos s,\sin s)$ and  $\boldsymbol {\hat {s}}(s)=(-\sin s,\cos s)$, respectively, where
$\boldsymbol {\hat {s}}(s)=(-\sin s,\cos s)$, respectively, where  $s$ is the complex argument, the unit cylinder is displaced by
$s$ is the complex argument, the unit cylinder is displaced by  $-1/w+1/(2w^2)$ in the normal direction. Thus, the effective domain,
$-1/w+1/(2w^2)$ in the normal direction. Thus, the effective domain,  $D_w$, is the region outside a cylinder of dimensionless radius
$D_w$, is the region outside a cylinder of dimensionless radius  $\rho (w):= 1-1/w+1/(2w^2)+O(1/w^3)$ – as shown in figure 2. Analytically continuing
$\rho (w):= 1-1/w+1/(2w^2)+O(1/w^3)$ – as shown in figure 2. Analytically continuing  $f(z)$ inside the annulus
$f(z)$ inside the annulus  $\rho (w)<|z|<1$ then yields the equivalent problem: find an
$\rho (w)<|z|<1$ then yields the equivalent problem: find an  $f(z)$ such that
$f(z)$ such that
 \begin{align} f(z) \text{ locally holomorphic} &\quad \text{in }D_w, \end{align}
\begin{align} f(z) \text{ locally holomorphic} &\quad \text{in }D_w, \end{align} \begin{align} \operatorname{Im} f(z)=0 &\quad \text{on }\partial D_w, \end{align}
\begin{align} \operatorname{Im} f(z)=0 &\quad \text{on }\partial D_w, \end{align} \begin{align} f(z)\sim z &\quad \text{as }|z|\to\infty \end{align}
\begin{align} f(z)\sim z &\quad \text{as }|z|\to\infty \end{align}
and with period  $\oint _{D_w}\, \mathrm {d} f = \varGamma$.
$\oint _{D_w}\, \mathrm {d} f = \varGamma$.
The potential problem (4.1) is a historic problem in the field of fluid dynamics, corresponding to the potential flow around a circular cylinder. Its solution can be found in many textbooks (Acheson Reference Acheson1990; Ablowitz & Fokas Reference Ablowitz and Fokas2003), i.e.
 \begin{equation} f(z) = z+ \frac{\rho^2}{z}+\frac{\varGamma}{2{\rm \pi}\mathrm{i}}\log\frac{z}{\rho}. \end{equation}
\begin{equation} f(z) = z+ \frac{\rho^2}{z}+\frac{\varGamma}{2{\rm \pi}\mathrm{i}}\log\frac{z}{\rho}. \end{equation}This potential corresponds to the director angle
 \begin{equation} \theta(x,y)\equiv{-}\arg f'(z) = 2\arg z-\arg(z-\rho \,\mathrm{e}^{\mathrm{i}\gamma})-\arg(z+\rho \,\mathrm{e}^{-\mathrm{i}\gamma}), \end{equation}
\begin{equation} \theta(x,y)\equiv{-}\arg f'(z) = 2\arg z-\arg(z-\rho \,\mathrm{e}^{\mathrm{i}\gamma})-\arg(z+\rho \,\mathrm{e}^{-\mathrm{i}\gamma}), \end{equation}
from which it is found that the defect locations are set by the period,  $\varGamma$, through the simple relation
$\varGamma$, through the simple relation  $\sin \gamma := \varGamma /(4{\rm \pi} \rho )$. In fact, this solution not only satisfies the finite anchoring condition (3.3) for
$\sin \gamma := \varGamma /(4{\rm \pi} \rho )$. In fact, this solution not only satisfies the finite anchoring condition (3.3) for  $w\gg 1$, but also satisfies the weak anchoring condition (3.2) for any
$w\gg 1$, but also satisfies the weak anchoring condition (3.2) for any  $w\geq 0$, provided
$w\geq 0$, provided  $\varGamma =0$ and we set
$\varGamma =0$ and we set  $\rho (w):= ({\sqrt {1+4/w^2}-2/w})^{1/2}$. We assume this choice of effective radius henceforth.
$\rho (w):= ({\sqrt {1+4/w^2}-2/w})^{1/2}$. We assume this choice of effective radius henceforth.
The solution (4.3) has previously been derived by Burylov & Raikher (Reference Burylov and Raikher1994) using a superposition of separable solutions to Laplace's equation. Furthermore, it is equivalent to an unrestricted director field with three defects points: two  $-1$ defects at
$-1$ defects at  $z= \rho \,\mathrm {e}^{\mathrm {i}\gamma }$ and
$z= \rho \,\mathrm {e}^{\mathrm {i}\gamma }$ and  $z=- \rho \,\mathrm {e}^{-\mathrm {i}\gamma }$ and a
$z=- \rho \,\mathrm {e}^{-\mathrm {i}\gamma }$ and a  $+2$ defect at
$+2$ defect at  $z=0$. Note that these defects do not reside in the bulk liquid crystal domain for finite
$z=0$. Note that these defects do not reside in the bulk liquid crystal domain for finite  $w$; however, the
$w$; however, the  $-1$ defects do correspond to surface defects as
$-1$ defects do correspond to surface defects as  $\rho (w\to \infty )\to 1$.
$\rho (w\to \infty )\to 1$.
The period  $\varGamma$, or equivalently the positions of the
$\varGamma$, or equivalently the positions of the  $-1$ defects, is chosen to minimize the energy of the static liquid crystal, (2.10). This energy reduces to the complex contour integral
$-1$ defects, is chosen to minimize the energy of the static liquid crystal, (2.10). This energy reduces to the complex contour integral
 \begin{equation} \hat{\mathcal{E}} = \frac{1}{4}\operatorname{Im}\left[2{\rm \pi}\mathrm{i} w+\oint_{|z|=1} w\frac{z\, f'(z)}{\bar{f}'(1/z)} -\log\bar{f}'(1/z) \frac{f''(z)}{f'(z)}\, \mathrm{d} z\right], \end{equation}
\begin{equation} \hat{\mathcal{E}} = \frac{1}{4}\operatorname{Im}\left[2{\rm \pi}\mathrm{i} w+\oint_{|z|=1} w\frac{z\, f'(z)}{\bar{f}'(1/z)} -\log\bar{f}'(1/z) \frac{f''(z)}{f'(z)}\, \mathrm{d} z\right], \end{equation}
after imposing the Schwarz function of the cylinder,  $\bar z =1/z$, (Shapiro Reference Shapiro1992; Ablowitz & Fokas Reference Ablowitz and Fokas2003). Inserting (4.2) into (4.4) results in a contour integral, which can be evaluated using Cauchy's residue theorem via accounting for the poles at the three defect points:
$\bar z =1/z$, (Shapiro Reference Shapiro1992; Ablowitz & Fokas Reference Ablowitz and Fokas2003). Inserting (4.2) into (4.4) results in a contour integral, which can be evaluated using Cauchy's residue theorem via accounting for the poles at the three defect points:  $z=0$,
$z=0$,  $\rho \,\mathrm {e}^{\mathrm {i}\gamma }$ and
$\rho \,\mathrm {e}^{\mathrm {i}\gamma }$ and  $-\rho \,\mathrm {e}^{-\mathrm {i}\gamma }$; this yields
$-\rho \,\mathrm {e}^{-\mathrm {i}\gamma }$; this yields
 \begin{equation} \hat{\mathcal{E}} =\frac{\rm \pi}{2}w(1-\rho(w)^2)-{\rm \pi}\log |1-\rho(w)^2|-{\rm \pi}\log|1+\rho(w)^2 \mathrm{e}^{2\mathrm{i}\gamma}|. \end{equation}
\begin{equation} \hat{\mathcal{E}} =\frac{\rm \pi}{2}w(1-\rho(w)^2)-{\rm \pi}\log |1-\rho(w)^2|-{\rm \pi}\log|1+\rho(w)^2 \mathrm{e}^{2\mathrm{i}\gamma}|. \end{equation}Further details on evaluating (4.4) can be found in Appendix B.1.
It is evident from (4.5) that  $\gamma =0$ minimizes the net free energy. This result is not surprising due to the up–down symmetry of the problem; however, this is not necessarily the case for other geometries (see § 5, for example). We also note that
$\gamma =0$ minimizes the net free energy. This result is not surprising due to the up–down symmetry of the problem; however, this is not necessarily the case for other geometries (see § 5, for example). We also note that  $\hat {\mathcal {E}}={\rm \pi} +{\rm \pi} \log (w/4) - {\rm \pi}/2\log |1-\varGamma /(4{\rm \pi} )|+ O(1/w)$ as
$\hat {\mathcal {E}}={\rm \pi} +{\rm \pi} \log (w/4) - {\rm \pi}/2\log |1-\varGamma /(4{\rm \pi} )|+ O(1/w)$ as  $w\to \infty$, i.e. the energy is logarithmically singular in the strong anchoring limit (a consequence of the surface defects at
$w\to \infty$, i.e. the energy is logarithmically singular in the strong anchoring limit (a consequence of the surface defects at  $z\sim \pm \mathrm {e}^{\pm \mathrm {i}\gamma }$).
$z\sim \pm \mathrm {e}^{\pm \mathrm {i}\gamma }$).
Above, we assumed the immersed cylinder only locally disturbs the liquid crystal, so that the director field is oriented at a constant angle in the far-field. Another physical, but energetically unfavourable, configuration is that the cylinder appears as a point defect of topological charge  $M\neq 0$ when viewed from afar, as introduced in (2.8). This would correspond to imposing
$M\neq 0$ when viewed from afar, as introduced in (2.8). This would correspond to imposing  $\varOmega (z)\sim -M\log z$ as
$\varOmega (z)\sim -M\log z$ as  $|z|\to \infty$. In this case, one can show that the resulting director angle is
$|z|\to \infty$. In this case, one can show that the resulting director angle is
 \begin{equation} \theta(z)= (2-M)\arg z-\arg(z^{2(1-M)}-\rho_M^{2(1-M)}), \end{equation}
\begin{equation} \theta(z)= (2-M)\arg z-\arg(z^{2(1-M)}-\rho_M^{2(1-M)}), \end{equation}
with effective cylinder radius,  $\rho _M(w)$, given by
$\rho _M(w)$, given by
 \begin{equation} [\rho_M(w)]^{2-2M} := \sqrt{1+\frac{4(1-M)^2}{w^2}}-\frac{2(1-M)}{w}, \end{equation}
\begin{equation} [\rho_M(w)]^{2-2M} := \sqrt{1+\frac{4(1-M)^2}{w^2}}-\frac{2(1-M)}{w}, \end{equation}
for any  $w\geq 0$. This solution corresponds to
$w\geq 0$. This solution corresponds to  $3-2M$ defects:
$3-2M$ defects:  $2(1-M)$ defects of strength
$2(1-M)$ defects of strength  $-1$ on
$-1$ on  $|z|=\rho _M(w)$ and a defect of strength
$|z|=\rho _M(w)$ and a defect of strength  $2-M$ at
$2-M$ at  $z=0$.
$z=0$.
We finish this example by noting that, since the potential problem (4.1) is invariant under a conformal map, the director angle (4.2) describes the director field outside any connected body, provided the conformal map from the wanted extended domain,  $\zeta \in D_w$, to the punctured domain,
$\zeta \in D_w$, to the punctured domain,  $|z|\geq \rho (w)$, can be obtained. Although such a conformal map must exist by the Riemann mapping theorem, determining such a mapping is notoriously difficult even for simple domains (Ablowitz & Fokas Reference Ablowitz and Fokas2003). Furthermore, although the effective domain,
$|z|\geq \rho (w)$, can be obtained. Although such a conformal map must exist by the Riemann mapping theorem, determining such a mapping is notoriously difficult even for simple domains (Ablowitz & Fokas Reference Ablowitz and Fokas2003). Furthermore, although the effective domain,  $\zeta \in D_w$, is mapped onto
$\zeta \in D_w$, is mapped onto  $|z|\geq \rho (w)$, the original domain,
$|z|\geq \rho (w)$, the original domain,  $\zeta \in D$, may not be mapped onto
$\zeta \in D$, may not be mapped onto  $|z|\geq 1$ since size and curvature are not necessarily preserved under a conformal map. To demonstrate this, we now consider a slightly more complicated domain: the region outside an equilateral triangle.
$|z|\geq 1$ since size and curvature are not necessarily preserved under a conformal map. To demonstrate this, we now consider a slightly more complicated domain: the region outside an equilateral triangle.
5. Example 2: immersed triangle with tangential anchoring
We next consider an immersed equilateral triangle with vertices at the roots of  $z^3=\mathrm {e}^{3\mathrm {i}\chi }$. As before, the liquid crystal is assumed to be oriented with the
$z^3=\mathrm {e}^{3\mathrm {i}\chi }$. As before, the liquid crystal is assumed to be oriented with the  $x$-axis in the far-field, i.e.
$x$-axis in the far-field, i.e.  $\varOmega (z)\to 0$ as
$\varOmega (z)\to 0$ as  $|z|\to \infty$, and subject to finite tangential (homogeneous) anchoring on the triangle, i.e.
$|z|\to \infty$, and subject to finite tangential (homogeneous) anchoring on the triangle, i.e.  $\varOmega (z)$ satisfies (3.3) with
$\varOmega (z)$ satisfies (3.3) with  $\phi =\arg z'(s)\mod {\rm \pi}$ on
$\phi =\arg z'(s)\mod {\rm \pi}$ on  $\partial D$. Assuming there are no defects within the liquid crystal, the complex director angle,
$\partial D$. Assuming there are no defects within the liquid crystal, the complex director angle,  $\varOmega$, must be single-valued. We may, thus, introduce a complex potential,
$\varOmega$, must be single-valued. We may, thus, introduce a complex potential,  $f(z)$, defined such that
$f(z)$, defined such that  $\varOmega (z)=\log f'(z)$ with period
$\varOmega (z)=\log f'(z)$ with period  $\varGamma$, as in (3.11). This configuration is plotted in figure 3.
$\varGamma$, as in (3.11). This configuration is plotted in figure 3.

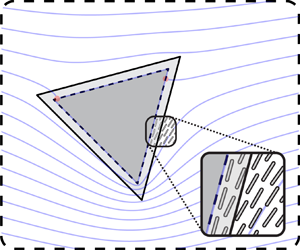
Figure 3. (Example 2.) Two-dimensional liquid crystal outside a triangle with corners at the roots of  $z^3=\mathrm {e}^{3\mathrm {i}\chi }$ (
$z^3=\mathrm {e}^{3\mathrm {i}\chi }$ ( $\partial D$, black solid curve) subject to weak (finite) tangential anchoring. The effective domain boundary is a similar triangle with corners at the roots of
$\partial D$, black solid curve) subject to weak (finite) tangential anchoring. The effective domain boundary is a similar triangle with corners at the roots of  $z^3=(1-2/w)^3\mathrm {e}^{3\mathrm {i}\chi }$ (
$z^3=(1-2/w)^3\mathrm {e}^{3\mathrm {i}\chi }$ ( $\partial D_w$, black dotted curve). The director field inside the effective domain, (5.4), is shown as faded blue curves for
$\partial D_w$, black dotted curve). The director field inside the effective domain, (5.4), is shown as faded blue curves for  $w=10$,
$w=10$,  $\chi ={\rm \pi} /4$, and period which minimizes the free energy,
$\chi ={\rm \pi} /4$, and period which minimizes the free energy,  $\varGamma \approx 3.14$.
$\varGamma \approx 3.14$.
For large anchoring strengths ( $w\gg 1$), the effective boundary technique is of use (§ 3). The first step is to construct the effective domain,
$w\gg 1$), the effective boundary technique is of use (§ 3). The first step is to construct the effective domain,  $D_w$. As the tangent vectors are constant, the triangle edges are displaced by
$D_w$. As the tangent vectors are constant, the triangle edges are displaced by  $1/w+O(1/w^3)$ in the normal direction with the corner angles preserved. Consequently, we find that the effective domain,
$1/w+O(1/w^3)$ in the normal direction with the corner angles preserved. Consequently, we find that the effective domain,  $D_w$, is the region outside a triangle with corners at the roots of
$D_w$, is the region outside a triangle with corners at the roots of  $z^3=(1-2/w)^3\mathrm {e}^{3\mathrm {i}\chi }$, as shown in figure 3. Analytically continuing
$z^3=(1-2/w)^3\mathrm {e}^{3\mathrm {i}\chi }$, as shown in figure 3. Analytically continuing  $f(z)$ into
$f(z)$ into  $D_w\setminus D$ yields the same potential problem as (4.1), but with
$D_w\setminus D$ yields the same potential problem as (4.1), but with  $D_w$ now denoting the domain outside the effective triangle.
$D_w$ now denoting the domain outside the effective triangle.
Since the potential problem, (4.1), is invariant under a conformal map, the solution (4.2) can be used here, provided a conformal map from the triangular domain,  $z\in D_w$, to the punctured domain,
$z\in D_w$, to the punctured domain,  $|\zeta |\geq 1$, can be found. Such a conformal map can be constructed using a Schwarz–Christoffel mapping, which maps the unit disk (or upper half-plane) onto a simple polygon (Driscoll & Trefethen Reference Driscoll and Trefethen2002; Ablowitz & Fokas Reference Ablowitz and Fokas2003).
$|\zeta |\geq 1$, can be found. Such a conformal map can be constructed using a Schwarz–Christoffel mapping, which maps the unit disk (or upper half-plane) onto a simple polygon (Driscoll & Trefethen Reference Driscoll and Trefethen2002; Ablowitz & Fokas Reference Ablowitz and Fokas2003).
By the Riemann-mapping theorem, there are three real degrees of freedom when constructing a conformal map (Ablowitz & Fokas Reference Ablowitz and Fokas2003). We shall fix the preimages of the effective triangle corners (i.e. the roots of  $z^3=(1-2/w)^3\,\mathrm {e}^{3\mathrm {i}\chi }$) to be the roots of
$z^3=(1-2/w)^3\,\mathrm {e}^{3\mathrm {i}\chi }$) to be the roots of  $\zeta ^3=\mathrm {e}^{3\mathrm {i}\chi }$. The corresponding Schwarz–Christoffel mapping is
$\zeta ^3=\mathrm {e}^{3\mathrm {i}\chi }$. The corresponding Schwarz–Christoffel mapping is
 \begin{equation} z(\zeta) = A+B\int^\zeta (s^3-\mathrm{e}^{3\mathrm{i}\chi})^{2/3}\frac{\mathrm{d} s}{s^2}, \end{equation}
\begin{equation} z(\zeta) = A+B\int^\zeta (s^3-\mathrm{e}^{3\mathrm{i}\chi})^{2/3}\frac{\mathrm{d} s}{s^2}, \end{equation}
for complex constants  $A$ and
$A$ and  $B$, which are fixed by ensuring that the corners of the triangle are mapped to their respective preimages. After evaluating the constants, the mapping (5.1) can be written as
$B$, which are fixed by ensuring that the corners of the triangle are mapped to their respective preimages. After evaluating the constants, the mapping (5.1) can be written as
 \begin{equation} z(\zeta) = \left(1-\frac{2}{w}\right)\frac{h(\mathrm{e}^{3\mathrm{i}\chi}/\zeta^{3})}{h(1)}\zeta, \end{equation}
\begin{equation} z(\zeta) = \left(1-\frac{2}{w}\right)\frac{h(\mathrm{e}^{3\mathrm{i}\chi}/\zeta^{3})}{h(1)}\zeta, \end{equation}
for the hypergeometric function  $h(\zeta ):= {}_2 F_1 (-2/3,-1/3;2/3;\zeta )$ (as defined by Abramowitz & Stegun (Reference Abramowitz and Stegun1964), for example).
$h(\zeta ):= {}_2 F_1 (-2/3,-1/3;2/3;\zeta )$ (as defined by Abramowitz & Stegun (Reference Abramowitz and Stegun1964), for example).
In the punctured domain,  $|\zeta |\geq 1$, the locally holomorphic function
$|\zeta |\geq 1$, the locally holomorphic function  $F(\zeta ):= f(z(\zeta ))$ satisfies
$F(\zeta ):= f(z(\zeta ))$ satisfies  $\operatorname {Im} F(\zeta )=0$ on
$\operatorname {Im} F(\zeta )=0$ on  $|\zeta |=1$,
$|\zeta |=1$,  $F(\zeta )\sim (1-2/w)\zeta /h(1)$ as
$F(\zeta )\sim (1-2/w)\zeta /h(1)$ as  $|\zeta |\to \infty$, and has a period
$|\zeta |\to \infty$, and has a period  $\varGamma$ around
$\varGamma$ around  $|\zeta |=1$. This problem is equivalent to (4.1) and, thus, has the same solution form, i.e.
$|\zeta |=1$. This problem is equivalent to (4.1) and, thus, has the same solution form, i.e.
 \begin{equation} F(\zeta) =\frac{1-2/w}{h(1)}\left( \zeta+\frac{1}{\zeta}\right) +\frac{\varGamma}{2{\rm \pi} \mathrm{i}}\log \zeta. \end{equation}
\begin{equation} F(\zeta) =\frac{1-2/w}{h(1)}\left( \zeta+\frac{1}{\zeta}\right) +\frac{\varGamma}{2{\rm \pi} \mathrm{i}}\log \zeta. \end{equation}
Taking the derivative of (5.3) with respect to  $z$ yields the director angle
$z$ yields the director angle
 \begin{equation} \theta(z)\equiv{-}\arg f'(z) =\tfrac{2}{3}\arg[\zeta(z)^3-\mathrm{e}^{3\mathrm{i}\chi}]- \arg[\zeta(z)-\mathrm{e}^{\mathrm{i}\gamma}]- \arg[\zeta(z)+\mathrm{e}^{-\mathrm{i}\gamma}], \end{equation}
\begin{equation} \theta(z)\equiv{-}\arg f'(z) =\tfrac{2}{3}\arg[\zeta(z)^3-\mathrm{e}^{3\mathrm{i}\chi}]- \arg[\zeta(z)-\mathrm{e}^{\mathrm{i}\gamma}]- \arg[\zeta(z)+\mathrm{e}^{-\mathrm{i}\gamma}], \end{equation}
for  $\sin \gamma := h(1)\varGamma /[4{\rm \pi} (1-2/w)]$ and
$\sin \gamma := h(1)\varGamma /[4{\rm \pi} (1-2/w)]$ and  $\zeta (z)$ given by the inverse of (5.2).
$\zeta (z)$ given by the inverse of (5.2).
As in Example 1 (§ 4), we will determine the period,  $\varGamma$, so as to minimize the net free energy of the liquid crystal, (2.10). However, unlike the cylindrical case, the free energy cannot be written as a closed integral of an analytic function since a triangle does not have an analytic Schwarz function,
$\varGamma$, so as to minimize the net free energy of the liquid crystal, (2.10). However, unlike the cylindrical case, the free energy cannot be written as a closed integral of an analytic function since a triangle does not have an analytic Schwarz function,  $\bar z = S(z)$, and the boundary angle,
$\bar z = S(z)$, and the boundary angle,  $\arg z_s$, is only defined piecewise (Shapiro Reference Shapiro1992; Ablowitz & Fokas Reference Ablowitz and Fokas2003). Instead we separate (2.10) into three finite contour integrals, corresponding to the three edges of the triangle. These contour integrals are then evaluated numerically for given
$\arg z_s$, is only defined piecewise (Shapiro Reference Shapiro1992; Ablowitz & Fokas Reference Ablowitz and Fokas2003). Instead we separate (2.10) into three finite contour integrals, corresponding to the three edges of the triangle. These contour integrals are then evaluated numerically for given  $\varGamma$,
$\varGamma$,  $w$ and
$w$ and  $\chi$. The resulting energy is then minimized numerically to determine
$\chi$. The resulting energy is then minimized numerically to determine  $\varGamma =\varGamma _{min}(w,\chi )$ – we use fminsearch with numerical quadrature in MATLAB (further details on evaluating the energy can be found in Appendix B.2).
$\varGamma =\varGamma _{min}(w,\chi )$ – we use fminsearch with numerical quadrature in MATLAB (further details on evaluating the energy can be found in Appendix B.2).
It is evident from (5.4) that there are five defect points on the effective triangle: three defects at the corners, i.e. at the roots of  $z^3=(1-2/w)^3\,\mathrm {e}^{3\mathrm {i}\chi }$; and two
$z^3=(1-2/w)^3\,\mathrm {e}^{3\mathrm {i}\chi }$; and two  $-1$ defects at
$-1$ defects at  $z=z(\pm \mathrm {e}^{\pm \mathrm {i}\gamma })$. Although the locations of the corner defects are fixed for any given
$z=z(\pm \mathrm {e}^{\pm \mathrm {i}\gamma })$. Although the locations of the corner defects are fixed for any given  $w$ and
$w$ and  $\chi$, the
$\chi$, the  $-1$ defects are dependent on
$-1$ defects are dependent on  $\varGamma =\varGamma _{min}(w,\chi )$, thus their locations are not immediately apparent. As
$\varGamma =\varGamma _{min}(w,\chi )$, thus their locations are not immediately apparent. As  $w\to \infty$, we observe that at least one of the
$w\to \infty$, we observe that at least one of the  $-1$ defects lies at a corner of the effective triangle (this can be seen approximately for
$-1$ defects lies at a corner of the effective triangle (this can be seen approximately for  $w=100$ in figure 4a, for example). This can be understood by noting that most of the liquid crystal deformation occurs in the vicinity of defects, thus the energy is minimized by minimizing the number of topological defects. For smaller anchoring strengths, however, the defects do not lie in the physical domain; thus, placing one of the
$w=100$ in figure 4a, for example). This can be understood by noting that most of the liquid crystal deformation occurs in the vicinity of defects, thus the energy is minimized by minimizing the number of topological defects. For smaller anchoring strengths, however, the defects do not lie in the physical domain; thus, placing one of the  $-1$ defects at a corner of the effective triangle is not necessarily the energy-minimizing solution (this can be seen for
$-1$ defects at a corner of the effective triangle is not necessarily the energy-minimizing solution (this can be seen for  $w=10$ in figure 4
$w=10$ in figure 4 ${\bigcirc{\kern-6pt 3}}$, for example).
${\bigcirc{\kern-6pt 3}}$, for example).

Figure 4. (Example 2.) (a) Plot of the complex arguments of the two  $-1$ defects as a function of the triangle orientation,
$-1$ defects as a function of the triangle orientation,  $\chi$, for
$\chi$, for  $w=10$ (dashed curve) and
$w=10$ (dashed curve) and  $w=100$ (solid curve). The rightmost defect is described by the blue curve with
$w=100$ (solid curve). The rightmost defect is described by the blue curve with  $\alpha _1 := \arg [z(\mathrm {e}^{\mathrm {i}\gamma _{min}})]$, whilst the leftmost defect is described by the red curve with
$\alpha _1 := \arg [z(\mathrm {e}^{\mathrm {i}\gamma _{min}})]$, whilst the leftmost defect is described by the red curve with  $\alpha _2 := \arg [-z(-\mathrm {e}^{-\mathrm {i}\gamma _{min}})]$. Here,
$\alpha _2 := \arg [-z(-\mathrm {e}^{-\mathrm {i}\gamma _{min}})]$. Here,  $\varGamma =\varGamma _{min} \equiv 4{\rm \pi} (1-2/w)\sin \gamma _{min} /h(1)$ is the period which minimizes the net free energy, (2.10). In
$\varGamma =\varGamma _{min} \equiv 4{\rm \pi} (1-2/w)\sin \gamma _{min} /h(1)$ is the period which minimizes the net free energy, (2.10). In  ${\bigcirc{\kern-6pt 1}}$–
${\bigcirc{\kern-6pt 1}}$– ${\bigcirc{\kern-6pt 3}}$, the positions of the
${\bigcirc{\kern-6pt 3}}$, the positions of the  $-1$ defects are plotted as coloured dots for
$-1$ defects are plotted as coloured dots for  $w=10$ and the labelled
$w=10$ and the labelled  $\chi$. Note that at least one of the defects lies approximately at a corner of the effective triangle for
$\chi$. Note that at least one of the defects lies approximately at a corner of the effective triangle for  $w=100$ (i.e.
$w=100$ (i.e.  $\alpha _1-\chi \approx 0$ or
$\alpha _1-\chi \approx 0$ or  $\alpha _2-\chi \approx \pm {\rm \pi}/3$), however, this is not the case for
$\alpha _2-\chi \approx \pm {\rm \pi}/3$), however, this is not the case for  $w=10$ (as seen in
$w=10$ (as seen in  ${\bigcirc{\kern-6pt 3}}$, for example). (b) Plot of the net free energy as a function of
${\bigcirc{\kern-6pt 3}}$, for example). (b) Plot of the net free energy as a function of  $\chi$, corresponding to the solutions presented in (a). For both
$\chi$, corresponding to the solutions presented in (a). For both  $w=10$ (dashed curve) and
$w=10$ (dashed curve) and  $w=100$ (solid curve), it is evident that the free energy is smallest when the triangle is pointing upwards (
$w=100$ (solid curve), it is evident that the free energy is smallest when the triangle is pointing upwards ( $\chi =-{\rm \pi} /6$) or downwards (
$\chi =-{\rm \pi} /6$) or downwards ( $\chi ={\rm \pi} /6$).
$\chi ={\rm \pi} /6$).
Analogy with the Kutta condition. Here we observe another analogy with the classical theory of potential flow past a body, in particular the placement of the rear stagnation point at a sharp trailing edge. The selection of the circulation which aligns these two is known as the Kutta condition, and the lift which results in that setting is known as the Kutta–Joukowski lift theorem (Acheson Reference Acheson1990). We observe a very similar structure in the case of strong anchoring ( $w\to \infty$); however, there is no direction associated with a nematic, thus either defect could reside at a corner (there is no ‘trailing’ edge). Moreover, since the force and torque on the body at equilibrium must be zero (due to the analogy with Stokes’ paradox, as described in § 2.3), here there is no ‘lift’, regardless of the circulation/period.
$w\to \infty$); however, there is no direction associated with a nematic, thus either defect could reside at a corner (there is no ‘trailing’ edge). Moreover, since the force and torque on the body at equilibrium must be zero (due to the analogy with Stokes’ paradox, as described in § 2.3), here there is no ‘lift’, regardless of the circulation/period.
For each orientation of the triangle,  $\chi$, we are able to minimize the net free energy over the period
$\chi$, we are able to minimize the net free energy over the period  $\varGamma$; thus, each
$\varGamma$; thus, each  $\chi$ has an energetic cost associated with it. In figure 4(b), this minimized free energy is plotted as a function of
$\chi$ has an energetic cost associated with it. In figure 4(b), this minimized free energy is plotted as a function of  $\chi$ for
$\chi$ for  $w=10$ and
$w=10$ and  $w=100$. It is apparent that that this energy is smallest when the triangle is either pointed upwards (
$w=100$. It is apparent that that this energy is smallest when the triangle is either pointed upwards ( $\chi =-{\rm \pi} /6$) or downwards (
$\chi =-{\rm \pi} /6$) or downwards ( $\chi ={\rm \pi} /6$): one of the sides of the triangle is aligned with the relaxed orientation of the liquid crystal, i.e. the
$\chi ={\rm \pi} /6$): one of the sides of the triangle is aligned with the relaxed orientation of the liquid crystal, i.e. the  $x$-axis. This observation appears to hold for all values of the anchoring strength,
$x$-axis. This observation appears to hold for all values of the anchoring strength,  $w$. Furthermore, for these values of
$w$. Furthermore, for these values of  $\chi$, the two
$\chi$, the two  $-1$ defects approximately lie at the two vertices associated with the horizontal side of the effective triangle (see figure 4
$-1$ defects approximately lie at the two vertices associated with the horizontal side of the effective triangle (see figure 4 ${\bigcirc{\kern-6pt 1}}$, for example). This is consistent with the experimental observations of Lapointe et al. (Reference Lapointe, Mason and Smalyukh2009), who observed that regular polygonal colloids reorient themselves until one of their sides aligns with the relaxed direction of the liquid crystal. The analysis of this phenomenon requires the introduction of dynamics within the liquid crystal and, thus, is left for future work.
${\bigcirc{\kern-6pt 1}}$, for example). This is consistent with the experimental observations of Lapointe et al. (Reference Lapointe, Mason and Smalyukh2009), who observed that regular polygonal colloids reorient themselves until one of their sides aligns with the relaxed direction of the liquid crystal. The analysis of this phenomenon requires the introduction of dynamics within the liquid crystal and, thus, is left for future work.
6. Example 3: Mobility of a Janus particle with hybrid anchoring
For a final example, let us reconsider the oriented liquid crystal outside a cylinder with dimensionless unit radius (as was considered in § 4). Unlike the previous two examples, here we assume the liquid crystal is subject to a weak hybrid anchoring condition (finite  $w$), which is partially tangential (homogeneous) and partially perpendicular (homeotropic). That is, we assume
$w$), which is partially tangential (homogeneous) and partially perpendicular (homeotropic). That is, we assume  $\varOmega (z)$ satisfies (3.3) on
$\varOmega (z)$ satisfies (3.3) on  $|z|=1$ with the anchoring angle
$|z|=1$ with the anchoring angle
 \begin{equation} \phi(s) = \arg z'(s) +\begin{cases} 0 & \text{if $|\arg[z(s)\, \mathrm{e}^{-\mathrm{i}\beta}]|<\alpha/2$,}\\ {\rm \pi}/2 & \text{if $|\arg[z(s) \,\mathrm{e}^{-\mathrm{i}\beta}]|>\alpha/2$,} \end{cases}\mod{\rm \pi}, \end{equation}
\begin{equation} \phi(s) = \arg z'(s) +\begin{cases} 0 & \text{if $|\arg[z(s)\, \mathrm{e}^{-\mathrm{i}\beta}]|<\alpha/2$,}\\ {\rm \pi}/2 & \text{if $|\arg[z(s) \,\mathrm{e}^{-\mathrm{i}\beta}]|>\alpha/2$,} \end{cases}\mod{\rm \pi}, \end{equation}
where  $-{\rm \pi} <\arg z\leq {\rm \pi}$ is the principal-value argument and
$-{\rm \pi} <\arg z\leq {\rm \pi}$ is the principal-value argument and  $\alpha \in [0,2{\rm \pi} ]$ and
$\alpha \in [0,2{\rm \pi} ]$ and  $\beta \in (-{\rm \pi}, {\rm \pi}]$ are given angles. This boundary condition corresponds to imposing tangential anchoring on an arc of angle
$\beta \in (-{\rm \pi}, {\rm \pi}]$ are given angles. This boundary condition corresponds to imposing tangential anchoring on an arc of angle  $\alpha$ and normal anchoring on the remaining circle. The angle
$\alpha$ and normal anchoring on the remaining circle. The angle  $\beta$ corresponds to the orientation of the tangential section of the cylinder. Similar theoretical configurations have focused on Janus particles in three-dimensions (Conradi et al. Reference Conradi, Ravnik, Bele, Zorko, Žumer and Muševič2009; Sahu et al. Reference Sahu, Kole, Ramaswamy and Dhara2020) and in a two-dimensional film (Loewe & Shendruk Reference Loewe and Shendruk2022); related work on squirming particles may be found in Lintuvuori, Würger & Stratford (Reference Lintuvuori, Würger and Stratford2017), Daddi-Moussa-Ider & Menzel (Reference Daddi-Moussa-Ider and Menzel2018), Chi et al. (Reference Chi, Gavrikov, Berlyand and Aranson2022) and Berlyand et al. (Reference Berlyand, Chi, Potomkin and Yip2022). This configuration is plotted in figure 5.
$\beta$ corresponds to the orientation of the tangential section of the cylinder. Similar theoretical configurations have focused on Janus particles in three-dimensions (Conradi et al. Reference Conradi, Ravnik, Bele, Zorko, Žumer and Muševič2009; Sahu et al. Reference Sahu, Kole, Ramaswamy and Dhara2020) and in a two-dimensional film (Loewe & Shendruk Reference Loewe and Shendruk2022); related work on squirming particles may be found in Lintuvuori, Würger & Stratford (Reference Lintuvuori, Würger and Stratford2017), Daddi-Moussa-Ider & Menzel (Reference Daddi-Moussa-Ider and Menzel2018), Chi et al. (Reference Chi, Gavrikov, Berlyand and Aranson2022) and Berlyand et al. (Reference Berlyand, Chi, Potomkin and Yip2022). This configuration is plotted in figure 5.

Figure 5. (Example 3.) Two-dimensional liquid crystal outside a unit cylinder ( $\partial D$, solid black curve) subject to weak (finite) tangential anchoring on an arc of angle
$\partial D$, solid black curve) subject to weak (finite) tangential anchoring on an arc of angle  $\alpha$ and weak normal anchoring on the remaining cylinder. The effective domain boundary is a shrunken cylinder of radius
$\alpha$ and weak normal anchoring on the remaining cylinder. The effective domain boundary is a shrunken cylinder of radius  $\rho (w)$ (
$\rho (w)$ ( $\partial D_w$, black dotted curve). The director field inside the effective domain, (6.6), is shown as faded blue curves for
$\partial D_w$, black dotted curve). The director field inside the effective domain, (6.6), is shown as faded blue curves for  $w=10$,
$w=10$,  $\alpha ={\rm \pi} /4$, and an orientation which minimizes the free energy,
$\alpha ={\rm \pi} /4$, and an orientation which minimizes the free energy,  $\beta ={\rm \pi} /2$.
$\beta ={\rm \pi} /2$.
Assuming there are no defects within the liquid crystal and it is oriented with the  $x$-axis at infinity (i.e.
$x$-axis at infinity (i.e.  $\varOmega (z)\to 0$ as
$\varOmega (z)\to 0$ as  $|z|\to \infty$),
$|z|\to \infty$),  $\varOmega (z)$ must be single-valued with the period in (2.8) vanishing (i.e.
$\varOmega (z)$ must be single-valued with the period in (2.8) vanishing (i.e.  $\varUpsilon =M=0$). Furthermore, since both tangential and normal anchoring conditions are conserved under the effective boundary technique (see § 3.1), imposing finite hybrid anchoring, i.e. (3.3) with (6.1), on
$\varUpsilon =M=0$). Furthermore, since both tangential and normal anchoring conditions are conserved under the effective boundary technique (see § 3.1), imposing finite hybrid anchoring, i.e. (3.3) with (6.1), on  $|z|=1$ is equivalent to imposing strong hybrid anchoring, i.e. (3.5) with (6.1), on the effective cylinder
$|z|=1$ is equivalent to imposing strong hybrid anchoring, i.e. (3.5) with (6.1), on the effective cylinder  $|z|=\rho (w)$, where
$|z|=\rho (w)$, where  $\rho (w) := (\sqrt {1+4/w^2}-2/w)^{1/2}$ is the effective radius derived in § 4. Analytically continuing
$\rho (w) := (\sqrt {1+4/w^2}-2/w)^{1/2}$ is the effective radius derived in § 4. Analytically continuing  $\varOmega (z)$ inside the annulus
$\varOmega (z)$ inside the annulus  $\rho (w)<|z|<1$ yields the problem: find a
$\rho (w)<|z|<1$ yields the problem: find a  $\varOmega (z)$ such that
$\varOmega (z)$ such that
 \begin{align} \varOmega(z) \text{ holomorphic} &\quad \text{in $|z|>\rho(w)$,} \end{align}
\begin{align} \varOmega(z) \text{ holomorphic} &\quad \text{in $|z|>\rho(w)$,} \end{align} \begin{align} \operatorname{Im} \left[z_s\exp{\varOmega(z)}\right]=0 &\quad \text{on $|z|=\rho(w)$ with $\left|\arg[z \mathrm{e}^{-\mathrm{i}\beta}]\right|<\alpha/2$,} \end{align}
\begin{align} \operatorname{Im} \left[z_s\exp{\varOmega(z)}\right]=0 &\quad \text{on $|z|=\rho(w)$ with $\left|\arg[z \mathrm{e}^{-\mathrm{i}\beta}]\right|<\alpha/2$,} \end{align} \begin{align} \operatorname{Re} \left[z_s\exp{\varOmega(z)}\right]=0 &\quad \text{on $|z|=\rho(w)$ with $\left|\arg[z \mathrm{e}^{-\mathrm{i}\beta}]\right|>\alpha/2$,} \end{align}
\begin{align} \operatorname{Re} \left[z_s\exp{\varOmega(z)}\right]=0 &\quad \text{on $|z|=\rho(w)$ with $\left|\arg[z \mathrm{e}^{-\mathrm{i}\beta}]\right|>\alpha/2$,} \end{align} \begin{align} \varOmega(z)\sim 1 &\quad \text{as $|z|\to\infty$}. \end{align}
\begin{align} \varOmega(z)\sim 1 &\quad \text{as $|z|\to\infty$}. \end{align} Since  $z_s=\mathrm {i} z$ for a circular boundary, it is convenient to introduce the complex function
$z_s=\mathrm {i} z$ for a circular boundary, it is convenient to introduce the complex function  $F(z) := \mathrm {i} z \exp \varOmega (z)$. It follows from (6.2) that
$F(z) := \mathrm {i} z \exp \varOmega (z)$. It follows from (6.2) that  $F(z)$ must be holomorphic inside the extended domain, has a pole at infinity, and has either the real or imaginary part vanishing on
$F(z)$ must be holomorphic inside the extended domain, has a pole at infinity, and has either the real or imaginary part vanishing on  $|z|=\rho (w)$. This problem is conformally invariant, thus we are free to use a conformal map to derive a solution.
$|z|=\rho (w)$. This problem is conformally invariant, thus we are free to use a conformal map to derive a solution.
Consider the conformal map from the  $z$-plane to the
$z$-plane to the  $\zeta$-plane:
$\zeta$-plane:
 \begin{equation} \zeta(z)=\mathrm{e}^{\mathrm{i}\alpha/4} \sqrt{\frac{z-\rho(w) \,\mathrm{e}^{\mathrm{i}(\beta-\alpha/2)}}{z-\rho(w) \,\mathrm{e}^{\mathrm{i}(\beta+\alpha/2)}}}. \end{equation}
\begin{equation} \zeta(z)=\mathrm{e}^{\mathrm{i}\alpha/4} \sqrt{\frac{z-\rho(w) \,\mathrm{e}^{\mathrm{i}(\beta-\alpha/2)}}{z-\rho(w) \,\mathrm{e}^{\mathrm{i}(\beta+\alpha/2)}}}. \end{equation}
This map is a composition of two conformal maps: a Möbius transformation, which maps the punctured  $z$-plane to the upper-half–plane; and the square-root map, which maps the upper-half–plane to the first quadrant, i.e. the
$z$-plane to the upper-half–plane; and the square-root map, which maps the upper-half–plane to the first quadrant, i.e. the  $\zeta$-plane.
$\zeta$-plane.
In the  $\zeta$-plane, the complex function
$\zeta$-plane, the complex function  $G(\zeta ):= F(z(\zeta ))$ satisfies
$G(\zeta ):= F(z(\zeta ))$ satisfies
 \begin{align} G(\zeta) \text{ holomorphic} &\quad \text{in $\operatorname{Re}\zeta>0$ & $\operatorname{Im}\zeta>0$,} \end{align}
\begin{align} G(\zeta) \text{ holomorphic} &\quad \text{in $\operatorname{Re}\zeta>0$ & $\operatorname{Im}\zeta>0$,} \end{align} \begin{align} \operatorname{Im} G(\zeta)=0 &\quad \text{on $\operatorname{Im}\zeta=0$,} \end{align}
\begin{align} \operatorname{Im} G(\zeta)=0 &\quad \text{on $\operatorname{Im}\zeta=0$,} \end{align} \begin{align} \operatorname{Re} G(\zeta)=0 &\quad \text{on $\operatorname{Re}\zeta=0$,} \end{align}
\begin{align} \operatorname{Re} G(\zeta)=0 &\quad \text{on $\operatorname{Re}\zeta=0$,} \end{align} \begin{align} G(\zeta)\sim \frac{\rho(w)\sin(\alpha/2)\, \mathrm{e}^{\mathrm{i}\beta}}{1-\mathrm{e}^{-\mathrm{i}\alpha/4} \zeta} &\quad \text{as $\zeta\to \mathrm{e}^{\mathrm{i}\alpha/4}$}. \end{align}
\begin{align} G(\zeta)\sim \frac{\rho(w)\sin(\alpha/2)\, \mathrm{e}^{\mathrm{i}\beta}}{1-\mathrm{e}^{-\mathrm{i}\alpha/4} \zeta} &\quad \text{as $\zeta\to \mathrm{e}^{\mathrm{i}\alpha/4}$}. \end{align}
Here, the pole at  $z=\infty$ has been mapped to an interior point at
$z=\infty$ has been mapped to an interior point at  $\zeta =\mathrm {e}^{\mathrm {i}\alpha /4}$. The boundary conditions (6.4b) and (6.4c) can be satisfied by introducing three additional poles at the images of
$\zeta =\mathrm {e}^{\mathrm {i}\alpha /4}$. The boundary conditions (6.4b) and (6.4c) can be satisfied by introducing three additional poles at the images of  $\zeta =\mathrm {e}^{\mathrm {i}\alpha /4}$ across the real and imaginary axes. This is commonly referred to as the method of images (Ablowitz & Fokas Reference Ablowitz and Fokas2003) and yields the solution to (6.4),
$\zeta =\mathrm {e}^{\mathrm {i}\alpha /4}$ across the real and imaginary axes. This is commonly referred to as the method of images (Ablowitz & Fokas Reference Ablowitz and Fokas2003) and yields the solution to (6.4),
 \begin{equation} G(\zeta) = \frac{\rho\sin(\alpha/2)\,\mathrm{e}^{\mathrm{i}\beta}}{1-\mathrm{e}^{-\mathrm{i}\alpha/4} \zeta}+\frac{\rho\sin(\alpha/2)\,\mathrm{e}^{-\mathrm{i}\beta}}{1+\mathrm{e}^{\mathrm{i}\alpha/4} \zeta}-\frac{\rho\sin(\alpha/2)\,\mathrm{e}^{-\mathrm{i}\beta}}{1-\mathrm{e}^{\mathrm{i}\alpha/4} \zeta}-\frac{\rho\sin(\alpha/2)\,\mathrm{e}^{\mathrm{i}\beta}}{1+\mathrm{e}^{-\mathrm{i}\alpha/4} \zeta}. \end{equation}
\begin{equation} G(\zeta) = \frac{\rho\sin(\alpha/2)\,\mathrm{e}^{\mathrm{i}\beta}}{1-\mathrm{e}^{-\mathrm{i}\alpha/4} \zeta}+\frac{\rho\sin(\alpha/2)\,\mathrm{e}^{-\mathrm{i}\beta}}{1+\mathrm{e}^{\mathrm{i}\alpha/4} \zeta}-\frac{\rho\sin(\alpha/2)\,\mathrm{e}^{-\mathrm{i}\beta}}{1-\mathrm{e}^{\mathrm{i}\alpha/4} \zeta}-\frac{\rho\sin(\alpha/2)\,\mathrm{e}^{\mathrm{i}\beta}}{1+\mathrm{e}^{-\mathrm{i}\alpha/4} \zeta}. \end{equation}Changing variables with (6.3) results in an expression for the director angle outside the cylinder,
 \begin{align} \theta(z)
&\equiv{-}\arg[-\mathrm{i} F(z)/z] =2\arg z-\arg(z-\rho
\,\mathrm{e}^{-\mathrm{i}\beta})\nonumber\\
&\quad-\tfrac{1}{2}\arg(z-\rho
\,\mathrm{e}^{\mathrm{i}(\beta+\alpha/2)})-
\tfrac{1}{2}\arg(z-\rho
\,\mathrm{e}^{\mathrm{i}(\beta-\alpha/2)}).
\end{align}
\begin{align} \theta(z)
&\equiv{-}\arg[-\mathrm{i} F(z)/z] =2\arg z-\arg(z-\rho
\,\mathrm{e}^{-\mathrm{i}\beta})\nonumber\\
&\quad-\tfrac{1}{2}\arg(z-\rho
\,\mathrm{e}^{\mathrm{i}(\beta+\alpha/2)})-
\tfrac{1}{2}\arg(z-\rho
\,\mathrm{e}^{\mathrm{i}(\beta-\alpha/2)}).
\end{align}
This solution is equivalent to an unrestricted director field with four defects: two  $-1/2$ defects corresponding to the tangential–normal anchoring interfaces at
$-1/2$ defects corresponding to the tangential–normal anchoring interfaces at  $z=\rho \,\mathrm {e}^{\mathrm {i}(\beta \pm \alpha /2)}$; one
$z=\rho \,\mathrm {e}^{\mathrm {i}(\beta \pm \alpha /2)}$; one  $-1$ defect at
$-1$ defect at  $z=\rho \,\mathrm {e}^{-\mathrm {i}\beta }$; and one
$z=\rho \,\mathrm {e}^{-\mathrm {i}\beta }$; and one  $+2$ defect at
$+2$ defect at  $z=0$.
$z=0$.
When  $\alpha =2{\rm \pi}$, the liquid crystal is subject to finite tangential anchoring on the entire cylinder (as considered in § 4). The director angle (6.6) recovers (4.3) in this case, with the body orientation,
$\alpha =2{\rm \pi}$, the liquid crystal is subject to finite tangential anchoring on the entire cylinder (as considered in § 4). The director angle (6.6) recovers (4.3) in this case, with the body orientation,  $\beta$, corresponding to the period
$\beta$, corresponding to the period  $\gamma := \arcsin [\varGamma /(4{\rm \pi} \rho )]$. Alternatively, when
$\gamma := \arcsin [\varGamma /(4{\rm \pi} \rho )]$. Alternatively, when  $\alpha =0$, the liquid crystal is subject to finite normal anchoring on the entire cylinder. The resulting director angle is equivalent to taking
$\alpha =0$, the liquid crystal is subject to finite normal anchoring on the entire cylinder. The resulting director angle is equivalent to taking  $z\mapsto \mathrm {i} z$ in (4.3) – i.e. the equipotential lines of the complex potential (4.2) rotated by
$z\mapsto \mathrm {i} z$ in (4.3) – i.e. the equipotential lines of the complex potential (4.2) rotated by  ${\rm \pi} /2$. The body orientation,
${\rm \pi} /2$. The body orientation,  $\beta$, is again analogous to the period
$\beta$, is again analogous to the period  $\gamma$ in this case. Finally, when
$\gamma$ in this case. Finally, when  $\alpha ={\rm \pi}$, the liquid crystal is subject to finite tangential/normal anchoring on exactly one half of the cylinder. This boundary condition has previously been termed ‘Janus anchoring’ due to the analogy with Janus particles (Loewe & Shendruk Reference Loewe and Shendruk2022). For strong Janus anchoring (
$\alpha ={\rm \pi}$, the liquid crystal is subject to finite tangential/normal anchoring on exactly one half of the cylinder. This boundary condition has previously been termed ‘Janus anchoring’ due to the analogy with Janus particles (Loewe & Shendruk Reference Loewe and Shendruk2022). For strong Janus anchoring ( $w=\infty$ and
$w=\infty$ and  $\alpha ={\rm \pi}$), the director angle (6.6) is equivalent to a subcase of the solution derived by Loewe & Shendruk (Reference Loewe and Shendruk2022), who used a superposition of separable solutions to construct a series representation.
$\alpha ={\rm \pi}$), the director angle (6.6) is equivalent to a subcase of the solution derived by Loewe & Shendruk (Reference Loewe and Shendruk2022), who used a superposition of separable solutions to construct a series representation.
For any given value of  $\alpha$, there exists a free energy associated with each orientation angle
$\alpha$, there exists a free energy associated with each orientation angle  $\beta$, i.e. (2.10). It is, thus, natural to ask what orientation minimizes this net free energy. (This is equivalent to asking what period,
$\beta$, i.e. (2.10). It is, thus, natural to ask what orientation minimizes this net free energy. (This is equivalent to asking what period,  $\gamma$, minimizes the net free energies in the previous two examples, §§ 4 and 5.) Since the anchoring angle (6.1) is only defined piecewise, the energy (2.10) cannot be written as a closed integral of an analytic function and, thus, cannot be evaluated using Cauchy's residue theorem (as was done in § 4, when
$\gamma$, minimizes the net free energies in the previous two examples, §§ 4 and 5.) Since the anchoring angle (6.1) is only defined piecewise, the energy (2.10) cannot be written as a closed integral of an analytic function and, thus, cannot be evaluated using Cauchy's residue theorem (as was done in § 4, when  $\alpha =2{\rm \pi}$, for example). We instead evaluate the energy using numerical quadrature for given values of the anchoring strength,
$\alpha =2{\rm \pi}$, for example). We instead evaluate the energy using numerical quadrature for given values of the anchoring strength,  $w$; sector angle,
$w$; sector angle,  $\alpha$; and orientation angle,
$\alpha$; and orientation angle,  $\beta$. We are then able to minimize over the angle
$\beta$. We are then able to minimize over the angle  $\beta$ numerically. Further details on the evaluation of the energy integral, (2.10), along with some partial analytical progress can be found in Appendix B.3.
$\beta$ numerically. Further details on the evaluation of the energy integral, (2.10), along with some partial analytical progress can be found in Appendix B.3.
If the anchoring is predominately normal to the cylinder (i.e.  $0\leq \alpha <{\rm \pi}$), we observe that the net free energy is minimized for a vertically aligned cylinder (i.e.
$0\leq \alpha <{\rm \pi}$), we observe that the net free energy is minimized for a vertically aligned cylinder (i.e.  $\beta =\pm {\rm \pi}/2$). Alternatively, if the anchoring is predominately tangential to the cylinder (i.e.
$\beta =\pm {\rm \pi}/2$). Alternatively, if the anchoring is predominately tangential to the cylinder (i.e.  ${\rm \pi} <\alpha \leq 2{\rm \pi}$), then the net free energy is minimized by a horizontally aligned cylinder (i.e.
${\rm \pi} <\alpha \leq 2{\rm \pi}$), then the net free energy is minimized by a horizontally aligned cylinder (i.e.  $\beta =0$ or
$\beta =0$ or  $2{\rm \pi}$). In the critical case (i.e. Janus anchoring,
$2{\rm \pi}$). In the critical case (i.e. Janus anchoring,  $\alpha ={\rm \pi}$), both horizontal and vertical alignment minimize the free energy. This observation is supported by figure 6, which shows the net free energy as a function of the orientation angle,
$\alpha ={\rm \pi}$), both horizontal and vertical alignment minimize the free energy. This observation is supported by figure 6, which shows the net free energy as a function of the orientation angle,  $\beta$, for various values of
$\beta$, for various values of  $\alpha$ and
$\alpha$ and  $w=10$. It also complements the analytical expression of the energy (4.5), which holds when
$w=10$. It also complements the analytical expression of the energy (4.5), which holds when  $\alpha =2{\rm \pi}$. This orientation preference suggests that, if the cylindrical body was free to rotate, it would align itself with either the vertical or horizontal axes depending on the value of
$\alpha =2{\rm \pi}$. This orientation preference suggests that, if the cylindrical body was free to rotate, it would align itself with either the vertical or horizontal axes depending on the value of  $\alpha$. Controlling the orientation of a body using surface anchoring has previously been studied in the context of microswimmers by Chi et al. (Reference Chi, Potomkin, Zhang, Berlyand and Aranson2020), and a related method of fluid transport by passing a travelling wave of preferred director angle has elsewhere been proposed by Krieger et al. (Reference Krieger, Dias and Powers2015). However, analysing such orientation control further requires the addition of dynamics within the liquid crystal and, thus, is left for future work.
$\alpha$. Controlling the orientation of a body using surface anchoring has previously been studied in the context of microswimmers by Chi et al. (Reference Chi, Potomkin, Zhang, Berlyand and Aranson2020), and a related method of fluid transport by passing a travelling wave of preferred director angle has elsewhere been proposed by Krieger et al. (Reference Krieger, Dias and Powers2015). However, analysing such orientation control further requires the addition of dynamics within the liquid crystal and, thus, is left for future work.

Figure 6. (Example 3.) Plot of the net free energy, (2.10), as a function of the orientation angle,  $\beta$, for anchoring strength
$\beta$, for anchoring strength  $w=10$ and various sector angles,
$w=10$ and various sector angles,  $\alpha$, delineated by colour in the figure legend. It is evident that
$\alpha$, delineated by colour in the figure legend. It is evident that  $\beta =-{\rm \pi} /2$ and
$\beta =-{\rm \pi} /2$ and  $\beta ={\rm \pi} /2$ minimize the net free energy when
$\beta ={\rm \pi} /2$ minimize the net free energy when  $0\leq \alpha < {\rm \pi}$ (as shown in
$0\leq \alpha < {\rm \pi}$ (as shown in  ${\bigcirc{\kern-6pt 1}}$, for example), whilst
${\bigcirc{\kern-6pt 1}}$, for example), whilst  $\beta =0$ and
$\beta =0$ and  $\beta =2{\rm \pi}$ minimize the net free energy when
$\beta =2{\rm \pi}$ minimize the net free energy when  ${\rm \pi} <\alpha \leq 2{\rm \pi}$ (as shown in
${\rm \pi} <\alpha \leq 2{\rm \pi}$ (as shown in  ${\bigcirc{\kern-6pt 2}}$, for example). In the critical case (
${\bigcirc{\kern-6pt 2}}$, for example). In the critical case ( $\alpha ={\rm \pi}$), all four orientation angles minimize the net free energy (as shown in
$\alpha ={\rm \pi}$), all four orientation angles minimize the net free energy (as shown in  ${\bigcirc{\kern-6pt 3}}$, for example).
${\bigcirc{\kern-6pt 3}}$, for example).
7. Conclusions
We have presented a path towards analytical solutions for the equilibrium nematic director field with an inclusion in two dimensions. A complex variables approach was found to provide a comfortable means of determining not only the director field but the surface tractions, net force and net torque on the immersed body. These quantities are not immediately accessible by other means due to topological conservation laws and the nonlinear boundary condition associated with weak (finite) anchoring constraints. One remaining question pertains to the accuracy of the asymptotic solutions derived for large anchoring strengths ( $w\gg 1$) using the effective boundary technique. Although not included here, preliminary comparisons of the analytical results described here with full numerical simulations suggest that the director field and even local tractions are predicted with high accuracy even for small anchoring strengths.
$w\gg 1$) using the effective boundary technique. Although not included here, preliminary comparisons of the analytical results described here with full numerical simulations suggest that the director field and even local tractions are predicted with high accuracy even for small anchoring strengths.
The analytical solutions provided here may represent a starting point to advance other calculations, for instance when calculating viscous drag on an immersed particle. The force and torque on particles with a non-uniform background director field might also be determined by adjusting the theory presented here. A non-trivial body force and torque, or alternatively particle migration and rotation, are expected in that setting. Equilibrium states also provide a basis for understanding the LC-mediated elastic interactions between two bodies, and the deformation of soft immersed bodies like red blood cells which ‘share the strain’ with the bulk liquid crystal (Nayani et al. Reference Nayani, Evans, Spagnolie and Abbott2020). Analytical representations of body interactions using conformal maps for multiply connected domains (Crowdy Reference Crowdy2020), and numerical techniques for accurately computing problems for all anchoring strengths, are under current investigation and will be described in subsequent works.
Acknowledgements
The authors acknowledge helpful conversations with N.L. Abbott and T.R. Powers.
Funding
The research leading to these results has received funding from the NSF grant DMR-2003819.
Declaration of interests
The authors report no conflict of interest.
Appendix A. Body forces and torques
In this appendix, we derive expressions for the forces and torques associated with the net free energy
 \begin{equation} \mathcal{E} = \iint_{D} \mathcal{F}(\boldsymbol{\nabla}\theta)\,\mathrm{d} A + \int_{\partial D} \mathcal{F}^s(\theta,\phi)\,\mathrm{d} s, \end{equation}
\begin{equation} \mathcal{E} = \iint_{D} \mathcal{F}(\boldsymbol{\nabla}\theta)\,\mathrm{d} A + \int_{\partial D} \mathcal{F}^s(\theta,\phi)\,\mathrm{d} s, \end{equation}
where  $\mathcal {F}(\boldsymbol {\nabla }\theta ):= K|\boldsymbol {\nabla }\theta |^2/2$ and
$\mathcal {F}(\boldsymbol {\nabla }\theta ):= K|\boldsymbol {\nabla }\theta |^2/2$ and  $\mathcal {F}^s(\theta,\phi ):= W\sin (\theta -\phi )^2/2$. We shall do this by applying a virtual work argument, following similar derivations by de Gennes & Prost (Reference de Gennes and Prost1993), Stewart (Reference Stewart2004) and Virga (Reference Virga2018). Throughout, we denote the boundary tangent as
$\mathcal {F}^s(\theta,\phi ):= W\sin (\theta -\phi )^2/2$. We shall do this by applying a virtual work argument, following similar derivations by de Gennes & Prost (Reference de Gennes and Prost1993), Stewart (Reference Stewart2004) and Virga (Reference Virga2018). Throughout, we denote the boundary tangent as  $\boldsymbol {\hat {s}}:= \boldsymbol {x}_s$ and the liquid crystal pointing normal as
$\boldsymbol {\hat {s}}:= \boldsymbol {x}_s$ and the liquid crystal pointing normal as  $\boldsymbol {\hat {\nu }}:= -\boldsymbol {x}_s^{\perp }$. Moreover, the anchoring angle,
$\boldsymbol {\hat {\nu }}:= -\boldsymbol {x}_s^{\perp }$. Moreover, the anchoring angle,  $\phi$, is assumed to be a function of the local boundary orientation: for example, homogeneous anchoring, i.e.
$\phi$, is assumed to be a function of the local boundary orientation: for example, homogeneous anchoring, i.e.  $(\cos \phi,\sin \phi )\parallel \boldsymbol {\hat {s}}$, and homeotropic anchoring, i.e.
$(\cos \phi,\sin \phi )\parallel \boldsymbol {\hat {s}}$, and homeotropic anchoring, i.e.  $(\cos \phi,\sin \phi ) \parallel \boldsymbol {\hat {\nu }}$.
$(\cos \phi,\sin \phi ) \parallel \boldsymbol {\hat {\nu }}$.
A.1. Variation of the bulk term
Consider the infinitesimal variation of the position and director angle within the liquid crystal
 $$\begin{gather} \boldsymbol{x} \mapsto\boldsymbol{x}+\boldsymbol{u}(\boldsymbol{x}), \end{gather}$$
$$\begin{gather} \boldsymbol{x} \mapsto\boldsymbol{x}+\boldsymbol{u}(\boldsymbol{x}), \end{gather}$$and
 $$\begin{gather}\theta(\boldsymbol{x}) \mapsto \theta(\boldsymbol{x})+\varPsi(\boldsymbol{x}), \end{gather}$$
$$\begin{gather}\theta(\boldsymbol{x}) \mapsto \theta(\boldsymbol{x})+\varPsi(\boldsymbol{x}), \end{gather}$$
respectively. Here, we shall restrict our attention to incompressible variations, i.e.  $\boldsymbol {\nabla }\boldsymbol {\cdot }\boldsymbol {u}=0$, thus
$\boldsymbol {\nabla }\boldsymbol {\cdot }\boldsymbol {u}=0$, thus  $\mathrm {d} A$ is conserved. Under these variations, the partial derivatives are mapped by
$\mathrm {d} A$ is conserved. Under these variations, the partial derivatives are mapped by
 $$\begin{gather} \partial_i:= \partial_{x_i} \mapsto(\delta_{i j}- u_{j,i})\partial_j= \partial_i-u_{j,i}\partial_j, \end{gather}$$
$$\begin{gather} \partial_i:= \partial_{x_i} \mapsto(\delta_{i j}- u_{j,i})\partial_j= \partial_i-u_{j,i}\partial_j, \end{gather}$$and
 $$\begin{gather}\partial_i\theta \mapsto \theta_{,i}+\varPsi_{,i} -\theta_{,j} u_{j,i}, \end{gather}$$
$$\begin{gather}\partial_i\theta \mapsto \theta_{,i}+\varPsi_{,i} -\theta_{,j} u_{j,i}, \end{gather}$$where repeated indices imply summation and commas within the index notation denote partial derivatives.
Consider an arbitrary area contained within the liquid crystal bulk,  $\mathcal {D}\subset D$. By the principle of virtual work, variations of the free energy over
$\mathcal {D}\subset D$. By the principle of virtual work, variations of the free energy over  $\mathcal {D}$ must balance body and surface forces,
$\mathcal {D}$ must balance body and surface forces,  $\boldsymbol {F}$ and
$\boldsymbol {F}$ and  $\boldsymbol {f}$, and generalized body and surface forces,
$\boldsymbol {f}$, and generalized body and surface forces,  $G$ and
$G$ and  $g$, that is
$g$, that is
 \begin{equation} \delta \iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta)\,\mathrm{d} A-\iint_{\mathcal{D}} p(\boldsymbol{x})\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u}\,\mathrm{d} A= \iint_{\mathcal{D}}\boldsymbol{F}\boldsymbol{\cdot} \boldsymbol{u} + G\varPsi\,\mathrm{d} V + \int_{\partial \mathcal{D}} \boldsymbol{f}\boldsymbol{\cdot}\boldsymbol{u} + g\varPsi \,\mathrm{d} S, \end{equation}
\begin{equation} \delta \iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta)\,\mathrm{d} A-\iint_{\mathcal{D}} p(\boldsymbol{x})\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u}\,\mathrm{d} A= \iint_{\mathcal{D}}\boldsymbol{F}\boldsymbol{\cdot} \boldsymbol{u} + G\varPsi\,\mathrm{d} V + \int_{\partial \mathcal{D}} \boldsymbol{f}\boldsymbol{\cdot}\boldsymbol{u} + g\varPsi \,\mathrm{d} S, \end{equation}
where  $\delta$ denotes the variation under (A2) and the pressure
$\delta$ denotes the variation under (A2) and the pressure  $p(\boldsymbol {x})$ is a Lagrange multiplier, which imposes incompressibility (i.e.
$p(\boldsymbol {x})$ is a Lagrange multiplier, which imposes incompressibility (i.e.  $\boldsymbol {\nabla }\boldsymbol {\cdot }\boldsymbol {u}=0$).
$\boldsymbol {\nabla }\boldsymbol {\cdot }\boldsymbol {u}=0$).
Using (A3) and the divergence theorem, we find that
 \begin{align} &\delta\iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta) \,\mathrm{d} A= \iint_{\mathcal{D}} \mathcal{F}_{\theta_j}(\varPsi_{,j} -\theta_{,i} u_{i,j}) \, \mathrm{d} A \nonumber\\ &\quad={-}\iint_{\mathcal{D}} (\mathcal{F}_{\theta_j})_{,j}\varPsi - (\mathcal{F}_{\theta_j} \theta_{,i})_{,j} u_{i}\, \mathrm{d} A - \int_{\partial \mathcal{D}} \mathcal{F}_{\theta_j}\hat{\nu}_j\varPsi - W_{\theta_j}\hat{\nu}_j \theta_{,i}u_{i}\, \mathrm{d} s. \end{align}
\begin{align} &\delta\iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta) \,\mathrm{d} A= \iint_{\mathcal{D}} \mathcal{F}_{\theta_j}(\varPsi_{,j} -\theta_{,i} u_{i,j}) \, \mathrm{d} A \nonumber\\ &\quad={-}\iint_{\mathcal{D}} (\mathcal{F}_{\theta_j})_{,j}\varPsi - (\mathcal{F}_{\theta_j} \theta_{,i})_{,j} u_{i}\, \mathrm{d} A - \int_{\partial \mathcal{D}} \mathcal{F}_{\theta_j}\hat{\nu}_j\varPsi - W_{\theta_j}\hat{\nu}_j \theta_{,i}u_{i}\, \mathrm{d} s. \end{align}
By defining  $\sigma ^d_{ij} := - \mathcal {F}_{\theta _j}\theta _{,i}$ and
$\sigma ^d_{ij} := - \mathcal {F}_{\theta _j}\theta _{,i}$ and  $M_j:= \mathcal {F}_{\theta _j}$, this can be written as
$M_j:= \mathcal {F}_{\theta _j}$, this can be written as
 \begin{equation} \delta\iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta) \, \mathrm{d} A={-}\iint_{\mathcal{D}} M_{j,j}\varPsi +\sigma^d_{ij,j} u_{i}\, \mathrm{d} A - \int_{\partial \mathcal{D}} M_j\hat{\nu}_j\varPsi +\sigma^d_{ij}\hat{\nu}_ju_{i}\, \mathrm{d} s. \end{equation}
\begin{equation} \delta\iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta) \, \mathrm{d} A={-}\iint_{\mathcal{D}} M_{j,j}\varPsi +\sigma^d_{ij,j} u_{i}\, \mathrm{d} A - \int_{\partial \mathcal{D}} M_j\hat{\nu}_j\varPsi +\sigma^d_{ij}\hat{\nu}_ju_{i}\, \mathrm{d} s. \end{equation}The Lagrange multiplier term can be written as
 \begin{equation} -\iint_{\mathcal{D}}p(\boldsymbol{x}) u_{i,i}\, \mathrm{d} A \equiv \iint_{\mathcal{D}}p_{,i} u_{i}\, \mathrm{d} A +\int_{\partial \mathcal{D}}p \hat{\nu}_iu_{i}\, \mathrm{d} s, \end{equation}
\begin{equation} -\iint_{\mathcal{D}}p(\boldsymbol{x}) u_{i,i}\, \mathrm{d} A \equiv \iint_{\mathcal{D}}p_{,i} u_{i}\, \mathrm{d} A +\int_{\partial \mathcal{D}}p \hat{\nu}_iu_{i}\, \mathrm{d} s, \end{equation}by the divergence theorem. Overall, we find that
 \begin{align} &\delta \iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta)\,\mathrm{d} A-\iint_{\mathcal{D}} p(\boldsymbol{x})\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u}\, \mathrm{d} A \nonumber\\ &\quad={-}\iint_{\mathcal{D}} M_{j,j}\varPsi +\sigma_{ij,j}^Eu_{i}\, \mathrm{d} A - \int_{\partial \mathcal{D}} M_j\hat{\nu}_j\varPsi +\sigma_{ij}^E\hat{\nu}_j u_{i}\, \mathrm{d} s, \end{align}
\begin{align} &\delta \iint_{\mathcal{D}} \mathcal{F}(\boldsymbol{\nabla}\theta)\,\mathrm{d} A-\iint_{\mathcal{D}} p(\boldsymbol{x})\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u}\, \mathrm{d} A \nonumber\\ &\quad={-}\iint_{\mathcal{D}} M_{j,j}\varPsi +\sigma_{ij,j}^Eu_{i}\, \mathrm{d} A - \int_{\partial \mathcal{D}} M_j\hat{\nu}_j\varPsi +\sigma_{ij}^E\hat{\nu}_j u_{i}\, \mathrm{d} s, \end{align}
where we define  $\sigma _{ij}^E := -p\delta _{ij}+\sigma ^d_{ij}$.
$\sigma _{ij}^E := -p\delta _{ij}+\sigma ^d_{ij}$.
We are now ready to balance the energy variation with the virtual work, as in (A4). From the translation variation, i.e.  $\boldsymbol {u}$, we obtain the force equilibrium equations
$\boldsymbol {u}$, we obtain the force equilibrium equations
 \begin{equation} F_i + \sigma^E_{ij,j}=0 \quad \text{and} \quad t_i +\sigma^E_{ij}\hat{\nu}_j = 0,\end{equation}
\begin{equation} F_i + \sigma^E_{ij,j}=0 \quad \text{and} \quad t_i +\sigma^E_{ij}\hat{\nu}_j = 0,\end{equation}
in  $\mathcal {D}$ and on
$\mathcal {D}$ and on  $\partial \mathcal {D}$, respectively. We can, thus, interpret
$\partial \mathcal {D}$, respectively. We can, thus, interpret  $\sigma _{ij}^E=-p\delta _{ij} - \mathcal {F}_{\theta _j}\theta _{,i}$ as a stress tensor (i.e. the Ericksen stress tensor). From the rotational variation, i.e.
$\sigma _{ij}^E=-p\delta _{ij} - \mathcal {F}_{\theta _j}\theta _{,i}$ as a stress tensor (i.e. the Ericksen stress tensor). From the rotational variation, i.e.  $\varPsi$, we obtain the moment equilibrium equations
$\varPsi$, we obtain the moment equilibrium equations
 \begin{equation} G+ M_{j,j}=0 \quad \text{and} \quad g + M_j\hat{\nu}_j = 0,\end{equation}
\begin{equation} G+ M_{j,j}=0 \quad \text{and} \quad g + M_j\hat{\nu}_j = 0,\end{equation}
in  $\mathcal {D}$ and on
$\mathcal {D}$ and on  $\partial \mathcal {D}$, respectively. We can, thus, interpret
$\partial \mathcal {D}$, respectively. We can, thus, interpret  $M_j:= \mathcal {F}_{\theta _j}$ as a generalized stress vector.
$M_j:= \mathcal {F}_{\theta _j}$ as a generalized stress vector.
Assuming there are no bulk forces (i.e.  $F_i=G=0$), the equilibrium equations, (A9a) and (A10a), take the form
$F_i=G=0$), the equilibrium equations, (A9a) and (A10a), take the form
 \begin{equation} \sigma^E_{ij,j}\equiv{-}(p\delta_{ij}+ \mathcal{F}_{\theta_j}\theta_{,i})_{,j}=0 \quad \text{and} \quad M_{j,j}\equiv(\mathcal{F}_{\theta_j})_{,j}=0,\end{equation}
\begin{equation} \sigma^E_{ij,j}\equiv{-}(p\delta_{ij}+ \mathcal{F}_{\theta_j}\theta_{,i})_{,j}=0 \quad \text{and} \quad M_{j,j}\equiv(\mathcal{F}_{\theta_j})_{,j}=0,\end{equation}
in  $\mathcal {D}$. By the chain rule,
$\mathcal {D}$. By the chain rule,  $(\mathcal {F}_{\theta _j}\theta _{,i} )_{,j}\equiv (\mathcal {F}_{\theta _j})_{,j}\theta _{,i}+\mathcal {F}_{\theta _j}\theta _{,ji}\equiv (\mathcal {F}_{\theta _j})_{,j}\theta _{,i}+\mathcal {F}_{,i}$, and thus (A11a,b) is directly equivalent to
$(\mathcal {F}_{\theta _j}\theta _{,i} )_{,j}\equiv (\mathcal {F}_{\theta _j})_{,j}\theta _{,i}+\mathcal {F}_{\theta _j}\theta _{,ji}\equiv (\mathcal {F}_{\theta _j})_{,j}\theta _{,i}+\mathcal {F}_{,i}$, and thus (A11a,b) is directly equivalent to
 \begin{equation} (p+ \mathcal{F})_{,i}=0 \quad \text{and} \quad (\mathcal{F}_{\theta_j})_{,j}=0,\end{equation}
\begin{equation} (p+ \mathcal{F})_{,i}=0 \quad \text{and} \quad (\mathcal{F}_{\theta_j})_{,j}=0,\end{equation}
in  $\mathcal {D}$. Integrating (A12a), yields an expression for the pressure
$\mathcal {D}$. Integrating (A12a), yields an expression for the pressure  $p=p_0-\mathcal {F}$ for an arbitrary constant
$p=p_0-\mathcal {F}$ for an arbitrary constant  $p_0$, leaving (A12b) as the final equilibrium equation. (Note that a similar result holds if the bulk forces are conservative.) To determine the physical boundary conditions, we now consider the case when
$p_0$, leaving (A12b) as the final equilibrium equation. (Note that a similar result holds if the bulk forces are conservative.) To determine the physical boundary conditions, we now consider the case when  $\mathcal {D}=D$.
$\mathcal {D}=D$.
A.2. Variation of the surface term
When applying the principle of virtual work on the domain  $D$, one will obtain a contribution from the surface energy term in (A1), on top of the already derived bulk contribution in (A8). In this case, the surface force,
$D$, one will obtain a contribution from the surface energy term in (A1), on top of the already derived bulk contribution in (A8). In this case, the surface force,  $\boldsymbol {f}$, and generalized surface force,
$\boldsymbol {f}$, and generalized surface force,  $g$, must satisfy
$g$, must satisfy
 \begin{equation} \delta\int_{\partial D} \mathcal{F}^s(\theta,\phi)\,\mathrm{d} s- \int_{\partial D} M_j\hat{\nu}_j\varPsi +\sigma_{ij}^E\hat{\nu}_j u_{i}\, \mathrm{d} s = \int_{\partial D} \boldsymbol{f}\boldsymbol{\cdot}\boldsymbol{u} + g\varPsi \mathrm{d} S, \end{equation}
\begin{equation} \delta\int_{\partial D} \mathcal{F}^s(\theta,\phi)\,\mathrm{d} s- \int_{\partial D} M_j\hat{\nu}_j\varPsi +\sigma_{ij}^E\hat{\nu}_j u_{i}\, \mathrm{d} s = \int_{\partial D} \boldsymbol{f}\boldsymbol{\cdot}\boldsymbol{u} + g\varPsi \mathrm{d} S, \end{equation}where the first and second integrals are the contribution from the surface and bulk energy, respectively.
On the domain boundary,  $\partial D$, we consider a translation and rotation variation of the same form as (A2). Under these variations, we find that
$\partial D$, we consider a translation and rotation variation of the same form as (A2). Under these variations, we find that
 \begin{align} \mathrm{d} s \quad&\mapsto\quad |\boldsymbol{x}_s+\boldsymbol{u}_s|\, \mathrm{d} s \sim(1 + \boldsymbol{\hat{s}}\boldsymbol{\cdot}\boldsymbol{u}_{s})\,\mathrm{d} s, \end{align}
\begin{align} \mathrm{d} s \quad&\mapsto\quad |\boldsymbol{x}_s+\boldsymbol{u}_s|\, \mathrm{d} s \sim(1 + \boldsymbol{\hat{s}}\boldsymbol{\cdot}\boldsymbol{u}_{s})\,\mathrm{d} s, \end{align} \begin{align} \boldsymbol{\hat{s}} := \boldsymbol{x}_s \quad&\mapsto\quad (\boldsymbol{x}+\boldsymbol{u})_s/(1 + \boldsymbol{u}_s\boldsymbol{\cdot}\boldsymbol{\hat{s}}) \sim \boldsymbol{\hat{s}} + (\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\boldsymbol{u}_{s}) \boldsymbol{\hat{\nu}}, \end{align}
\begin{align} \boldsymbol{\hat{s}} := \boldsymbol{x}_s \quad&\mapsto\quad (\boldsymbol{x}+\boldsymbol{u})_s/(1 + \boldsymbol{u}_s\boldsymbol{\cdot}\boldsymbol{\hat{s}}) \sim \boldsymbol{\hat{s}} + (\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\boldsymbol{u}_{s}) \boldsymbol{\hat{\nu}}, \end{align} \begin{align} \boldsymbol{\hat{\nu}} := -\boldsymbol{x}_s^{{\perp}}\quad&\mapsto\quad -(\boldsymbol{x}^\perp + \boldsymbol{u}^\perp)_s/(1 + \boldsymbol{u}_s\boldsymbol{\cdot}\boldsymbol{\hat{s}}) \sim \boldsymbol{\hat{\nu}} -(\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\boldsymbol{u}_{s}) \boldsymbol{\hat{s}}, \end{align}
\begin{align} \boldsymbol{\hat{\nu}} := -\boldsymbol{x}_s^{{\perp}}\quad&\mapsto\quad -(\boldsymbol{x}^\perp + \boldsymbol{u}^\perp)_s/(1 + \boldsymbol{u}_s\boldsymbol{\cdot}\boldsymbol{\hat{s}}) \sim \boldsymbol{\hat{\nu}} -(\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\boldsymbol{u}_{s}) \boldsymbol{\hat{s}}, \end{align} \begin{align} \phi \quad&\mapsto\quad \phi -\boldsymbol{\hat{\nu}}\boldsymbol{\cdot} \boldsymbol{u}_{s}, \end{align}
\begin{align} \phi \quad&\mapsto\quad \phi -\boldsymbol{\hat{\nu}}\boldsymbol{\cdot} \boldsymbol{u}_{s}, \end{align}
where subscript  $s$ denotes an arclength derivative. Note that the variation in
$s$ denotes an arclength derivative. Note that the variation in  $\phi$, i.e. (A14d), comes from the assumption that
$\phi$, i.e. (A14d), comes from the assumption that  $\phi$ is a function of the local boundary angle.
$\phi$ is a function of the local boundary angle.
Using (A14), we find that
 \begin{align} \delta\int_{\partial \tilde{D}} \mathcal{F}^s(\tilde{\theta},\tilde{\phi})\,\mathrm{d} \tilde{s} &= \int_{\partial D} \mathcal{F}^s_{\theta}\varPsi -\mathcal{F}^s_\phi(\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\boldsymbol{u}_{s})+\mathcal{F}^s(\boldsymbol{\hat{s}}\boldsymbol{\cdot}\boldsymbol{u}_{s})\,\mathrm{d} s\nonumber\\ &=\int_{\partial D} \mathcal{F}^s_{\theta}\varPsi +(\mathcal{F}^s_\phi\boldsymbol{\hat{\nu}}-\mathcal{F}^s \boldsymbol{\hat{s}} )_{s} \boldsymbol{\cdot}\boldsymbol{u}\, \mathrm{d} s-[( \mathcal{F}^s_\phi\boldsymbol{\hat{\nu}}-\mathcal{F}^s \boldsymbol{\hat{s}} ) \boldsymbol{\cdot}\boldsymbol{u}]_{\partial D}. \end{align}
\begin{align} \delta\int_{\partial \tilde{D}} \mathcal{F}^s(\tilde{\theta},\tilde{\phi})\,\mathrm{d} \tilde{s} &= \int_{\partial D} \mathcal{F}^s_{\theta}\varPsi -\mathcal{F}^s_\phi(\boldsymbol{\hat{\nu}}\boldsymbol{\cdot}\boldsymbol{u}_{s})+\mathcal{F}^s(\boldsymbol{\hat{s}}\boldsymbol{\cdot}\boldsymbol{u}_{s})\,\mathrm{d} s\nonumber\\ &=\int_{\partial D} \mathcal{F}^s_{\theta}\varPsi +(\mathcal{F}^s_\phi\boldsymbol{\hat{\nu}}-\mathcal{F}^s \boldsymbol{\hat{s}} )_{s} \boldsymbol{\cdot}\boldsymbol{u}\, \mathrm{d} s-[( \mathcal{F}^s_\phi\boldsymbol{\hat{\nu}}-\mathcal{F}^s \boldsymbol{\hat{s}} ) \boldsymbol{\cdot}\boldsymbol{u}]_{\partial D}. \end{align}
Here, the final term comes from integrating by parts and corresponds to a net jump around the boundary  $\partial D$. For a closed boundary, this term will vanish; thus, we shall disregard it.
$\partial D$. For a closed boundary, this term will vanish; thus, we shall disregard it.
Combining (A13) and (A15) yields expressions for the surface force,  $\boldsymbol {f}$, and generalized surface force,
$\boldsymbol {f}$, and generalized surface force,  $g$. From the translational variation, i.e.
$g$. From the translational variation, i.e.  $\boldsymbol {u}$, we obtain the surface force
$\boldsymbol {u}$, we obtain the surface force
 \begin{equation} -\boldsymbol{f} = (\mathcal{F}-p_0)\boldsymbol{\hat{\nu}} -\mathcal{F}_{\theta_j}\hat{\nu}_j\boldsymbol{\nabla}\theta+(\mathcal{F}^s \boldsymbol{\hat{s}} -\mathcal{F}^s_\phi\boldsymbol{\hat{\nu}})_{s}, \end{equation}
\begin{equation} -\boldsymbol{f} = (\mathcal{F}-p_0)\boldsymbol{\hat{\nu}} -\mathcal{F}_{\theta_j}\hat{\nu}_j\boldsymbol{\nabla}\theta+(\mathcal{F}^s \boldsymbol{\hat{s}} -\mathcal{F}^s_\phi\boldsymbol{\hat{\nu}})_{s}, \end{equation}
where we have used the fact that  $\sigma ^E_{ij}\hat {\nu }_j\equiv (\mathcal {F}-p_0)\hat {\nu }_i -\mathcal {F}_{\theta _j}\hat {\nu }_j\theta _{,i}$. From the rotational variation, i.e.
$\sigma ^E_{ij}\hat {\nu }_j\equiv (\mathcal {F}-p_0)\hat {\nu }_i -\mathcal {F}_{\theta _j}\hat {\nu }_j\theta _{,i}$. From the rotational variation, i.e.  $\varPsi$, we obtain the generalized surface force
$\varPsi$, we obtain the generalized surface force
 \begin{equation} -g ={-}\mathcal{F}^s_{\theta} + \mathcal{F}_{\theta_j}\hat{\nu}_j, \end{equation}
\begin{equation} -g ={-}\mathcal{F}^s_{\theta} + \mathcal{F}_{\theta_j}\hat{\nu}_j, \end{equation}
where we have used the fact that  $M_j = \mathcal {F}_{\theta _j}$.
$M_j = \mathcal {F}_{\theta _j}$.
It is natural to assume zero surface moment (i.e.  $g=0$) at the boundary; thus, from (A17), we obtain the boundary condition
$g=0$) at the boundary; thus, from (A17), we obtain the boundary condition
 \begin{equation} \mathcal{F}_{\theta_j}\hat{\nu}_j -\mathcal{F}^s_{\theta} = 0, \end{equation}
\begin{equation} \mathcal{F}_{\theta_j}\hat{\nu}_j -\mathcal{F}^s_{\theta} = 0, \end{equation}
on  $\partial D$.
$\partial D$.
Overall, (A12a,b) and (A18) yield the equilibrium equation
 \begin{equation} (\mathcal{F}_{\theta_j})_{,j}=0 \quad \text{subject to}\quad \mathcal{F}_{\theta_j}\hat{\nu}_j =\mathcal{F}^s_{\theta}, \end{equation}
\begin{equation} (\mathcal{F}_{\theta_j})_{,j}=0 \quad \text{subject to}\quad \mathcal{F}_{\theta_j}\hat{\nu}_j =\mathcal{F}^s_{\theta}, \end{equation}
with the surface traction on  $\partial D$ given by (A16).
$\partial D$ given by (A16).
A.3. Dirichlet with Rapini–Papoular energy
For the Dirichlet bulk energy,  $\mathcal {F}:= K|\boldsymbol {\nabla }\theta |^2/2$, and Rapini–Papoular surface energy,
$\mathcal {F}:= K|\boldsymbol {\nabla }\theta |^2/2$, and Rapini–Papoular surface energy,  $\mathcal {F}^s:= W\sin (\theta -\phi )^2/2$, considered in this paper, the equilibrium equations (A19) take the form
$\mathcal {F}^s:= W\sin (\theta -\phi )^2/2$, considered in this paper, the equilibrium equations (A19) take the form
 \begin{equation} \nabla^2\theta =0 \quad \text{subject to}\quad K\frac{\partial \theta}{\partial\nu}= \frac{W}{2}\sin[2(\theta-\phi)],\end{equation}
\begin{equation} \nabla^2\theta =0 \quad \text{subject to}\quad K\frac{\partial \theta}{\partial\nu}= \frac{W}{2}\sin[2(\theta-\phi)],\end{equation}whilst the surface traction, (A16), is
 \begin{equation} -\boldsymbol{f}=\frac{K}{2}|\boldsymbol{\nabla}\theta|^2 \boldsymbol{\hat{\nu}}-K\frac{\partial \theta}{\partial\nu} \boldsymbol{\nabla}\theta+ \frac{W}{2}\{\sin[2(\theta-\phi)]\boldsymbol{\hat{\nu}} +\sin(\theta-\phi)^2 \boldsymbol{\hat{s}}\}_{s}, \end{equation}
\begin{equation} -\boldsymbol{f}=\frac{K}{2}|\boldsymbol{\nabla}\theta|^2 \boldsymbol{\hat{\nu}}-K\frac{\partial \theta}{\partial\nu} \boldsymbol{\nabla}\theta+ \frac{W}{2}\{\sin[2(\theta-\phi)]\boldsymbol{\hat{\nu}} +\sin(\theta-\phi)^2 \boldsymbol{\hat{s}}\}_{s}, \end{equation}
up to an additive constant pressure,  $-p_0\boldsymbol {\hat {\nu }}$. For homogeneous or homeotropic anchoring,
$-p_0\boldsymbol {\hat {\nu }}$. For homogeneous or homeotropic anchoring,  $\boldsymbol {\hat {\nu }}_s= \phi _s\boldsymbol {\hat {s}}$ and
$\boldsymbol {\hat {\nu }}_s= \phi _s\boldsymbol {\hat {s}}$ and  $\boldsymbol {\hat {s}}_s=-\phi _s\boldsymbol {\hat {\nu }}$; consequently, one can show that the traction, (A21), acts purely in the normal direction, i.e.
$\boldsymbol {\hat {s}}_s=-\phi _s\boldsymbol {\hat {\nu }}$; consequently, one can show that the traction, (A21), acts purely in the normal direction, i.e.
 \begin{equation} -\boldsymbol{f}=\left[\frac{K}{2}(\theta_s^2-\theta_{\nu}^2) +K\theta_{\nu s}-\frac{W}{2}\sin(\theta-\phi)^2 \phi_s\right]\boldsymbol{\hat{\nu}} , \end{equation}
\begin{equation} -\boldsymbol{f}=\left[\frac{K}{2}(\theta_s^2-\theta_{\nu}^2) +K\theta_{\nu s}-\frac{W}{2}\sin(\theta-\phi)^2 \phi_s\right]\boldsymbol{\hat{\nu}} , \end{equation}where the boundary condition (A20b) has been imposed.
Appendix B. Computing free energies
In this appendix, we provide further details on the evaluation of the complex energy integral, (2.10), for the three examples presented in the main text. We begin by noting that  $\varOmega (z)$ is single-valued in all three examples, thus the energy (2.10) can be written as the complex contour integral
$\varOmega (z)$ is single-valued in all three examples, thus the energy (2.10) can be written as the complex contour integral
 \begin{equation} \hat{\mathcal{E}} ={-}\frac{1}{4}\operatorname{Im}\left[\oint_{\partial D} \overline{\varOmega( z)} \varOmega'(z)\,\mathrm{d} z\right]+ \frac{w}{4} \operatorname{Re}\left[P-\oint_{\partial{D}}\, \mathrm{e}^{\varOmega(z)-\overline{\varOmega( z)}}\frac{\mathrm{e}^{2\mathrm{i}\phi}}{z'(s)} \mathrm{d} z\right], \end{equation}
\begin{equation} \hat{\mathcal{E}} ={-}\frac{1}{4}\operatorname{Im}\left[\oint_{\partial D} \overline{\varOmega( z)} \varOmega'(z)\,\mathrm{d} z\right]+ \frac{w}{4} \operatorname{Re}\left[P-\oint_{\partial{D}}\, \mathrm{e}^{\varOmega(z)-\overline{\varOmega( z)}}\frac{\mathrm{e}^{2\mathrm{i}\phi}}{z'(s)} \mathrm{d} z\right], \end{equation}
where  $P$ is the perimeter of
$P$ is the perimeter of  $\partial D$.
$\partial D$.
B.1. Example 1
In the first example,  $\partial D$ denotes the unit circle,
$\partial D$ denotes the unit circle,  $|z|=1$; the anchoring angle,
$|z|=1$; the anchoring angle,  $\phi$, was defined such that
$\phi$, was defined such that  $\mathrm {e}^{\mathrm {i}\phi } = z'(s) = \mathrm {i} z$; and the complex potential,
$\mathrm {e}^{\mathrm {i}\phi } = z'(s) = \mathrm {i} z$; and the complex potential,  $f(z)$, was defined such that
$f(z)$, was defined such that  $\varOmega (z)=\log f'(z)$. Inserting these expressions, along with the unit circle's Schwarz function,
$\varOmega (z)=\log f'(z)$. Inserting these expressions, along with the unit circle's Schwarz function,  $\bar {z}=1/z$, and
$\bar {z}=1/z$, and  $P=2{\rm \pi}$ into (B1) yields the contour integral given in the main text, i.e. (4.4).
$P=2{\rm \pi}$ into (B1) yields the contour integral given in the main text, i.e. (4.4).
The complex potential was found to be (4.2), thus we have that
 $$\begin{gather} f'(z) = (z- \rho \,\mathrm{e}^{\mathrm{i}\gamma})(z+\rho \,\mathrm{e}^{-\mathrm{i}\gamma})/z^2, \end{gather}$$
$$\begin{gather} f'(z) = (z- \rho \,\mathrm{e}^{\mathrm{i}\gamma})(z+\rho \,\mathrm{e}^{-\mathrm{i}\gamma})/z^2, \end{gather}$$and
 $$\begin{gather}\bar{f}'(1/z) ={-}\rho^2 (z-\mathrm{e}^{-\mathrm{i}\gamma}/\rho) (z+\mathrm{e}^{\mathrm{i}\gamma}/\rho), \end{gather}$$
$$\begin{gather}\bar{f}'(1/z) ={-}\rho^2 (z-\mathrm{e}^{-\mathrm{i}\gamma}/\rho) (z+\mathrm{e}^{\mathrm{i}\gamma}/\rho), \end{gather}$$
where  $\sin \gamma := \varGamma /(4{\rm \pi} \rho )$. It is apparent from (B2) that
$\sin \gamma := \varGamma /(4{\rm \pi} \rho )$. It is apparent from (B2) that  $f'(z)$ has two zeros at
$f'(z)$ has two zeros at  $z=\pm \rho \,\mathrm {e}^{\pm \mathrm {i}\gamma }$ and one pole at
$z=\pm \rho \,\mathrm {e}^{\pm \mathrm {i}\gamma }$ and one pole at  $z=0$ (i.e. the three topological defects), whilst
$z=0$ (i.e. the three topological defects), whilst  $\bar {f}'(1/z)$ only has two zeros at
$\bar {f}'(1/z)$ only has two zeros at  $z=\pm \mathrm {e}^{\pm \mathrm {i}\gamma }/\rho$. Consequently, the integrand in (4.4) is holomorphic in
$z=\pm \mathrm {e}^{\pm \mathrm {i}\gamma }/\rho$. Consequently, the integrand in (4.4) is holomorphic in  $|z|\leq 1$ except for three simple poles at
$|z|\leq 1$ except for three simple poles at  $z= \rho \,\mathrm {e}^{\mathrm {i}\gamma }$,
$z= \rho \,\mathrm {e}^{\mathrm {i}\gamma }$,  $z=- \rho \,\mathrm {e}^{-\mathrm {i}\gamma }$ and
$z=- \rho \,\mathrm {e}^{-\mathrm {i}\gamma }$ and  $z=0$. The analytical expression (4.5) follows from applying Cauchy's residue theorem.
$z=0$. The analytical expression (4.5) follows from applying Cauchy's residue theorem.
B.2. Example 2
In the second example,  $\partial D$ denotes the equilateral triangle with corners at the roots of
$\partial D$ denotes the equilateral triangle with corners at the roots of  $z^3=\mathrm {e}^{3\mathrm {i}\chi }$, whilst the anchoring angle,
$z^3=\mathrm {e}^{3\mathrm {i}\chi }$, whilst the anchoring angle,  $\phi$, and complex potential,
$\phi$, and complex potential,  $f(z)$, are again defined such that
$f(z)$, are again defined such that  $\mathrm {e}^{\mathrm {i}\phi } = z'(s)$ and
$\mathrm {e}^{\mathrm {i}\phi } = z'(s)$ and  $\varOmega (z)=\log f'(z)$, respectively. Inserting these expressions and
$\varOmega (z)=\log f'(z)$, respectively. Inserting these expressions and  $P=3\sqrt {3}/2$ into (B1) yields
$P=3\sqrt {3}/2$ into (B1) yields
 \begin{equation} \hat{\mathcal{E}} =\frac{3\sqrt{3}}{8}w -\frac{1}{4}\oint_{\partial D}\operatorname{Im}\left[ \log\overline{f'(z)} \frac{f''(z)}{f'(z)}z'(s)\right]+ w \operatorname{Re}\left[\frac{f'(z)}{\overline{f'(z)}}z'(s)^2\right]\, \mathrm{d} s, \end{equation}
\begin{equation} \hat{\mathcal{E}} =\frac{3\sqrt{3}}{8}w -\frac{1}{4}\oint_{\partial D}\operatorname{Im}\left[ \log\overline{f'(z)} \frac{f''(z)}{f'(z)}z'(s)\right]+ w \operatorname{Re}\left[\frac{f'(z)}{\overline{f'(z)}}z'(s)^2\right]\, \mathrm{d} s, \end{equation}where
 \begin{equation} f'(z) = \frac{(\zeta(z)-\mathrm{e}^{\mathrm{i}\gamma}) (\zeta(z)+\mathrm{e}^{-\mathrm{i}\gamma})}{(\zeta(z)^3-\mathrm{e}^{\mathrm{i}\chi})^{2/3}}, \end{equation}
\begin{equation} f'(z) = \frac{(\zeta(z)-\mathrm{e}^{\mathrm{i}\gamma}) (\zeta(z)+\mathrm{e}^{-\mathrm{i}\gamma})}{(\zeta(z)^3-\mathrm{e}^{\mathrm{i}\chi})^{2/3}}, \end{equation}
is the potential derived in the main text,  $\sin \gamma := h(1)\varGamma /[4{\rm \pi} (1-2/w)]$, and
$\sin \gamma := h(1)\varGamma /[4{\rm \pi} (1-2/w)]$, and  $\zeta (z)$ is given by the inverse of (5.2).
$\zeta (z)$ is given by the inverse of (5.2).
To evaluate the integral in (B3), we split the integration contour into three line segments corresponding to the three sides of the triangle, that is  $\partial D = L_1\cup L_2\cup L_3$ where
$\partial D = L_1\cup L_2\cup L_3$ where  $L_1 := [\mathrm {e}^{\mathrm {i}\chi },\mathrm {e}^{\mathrm {i}(\chi +2{\rm \pi} /3)}]$,
$L_1 := [\mathrm {e}^{\mathrm {i}\chi },\mathrm {e}^{\mathrm {i}(\chi +2{\rm \pi} /3)}]$,  $L_2 := [\mathrm {e}^{\mathrm {i}(\chi +2{\rm \pi} /3)},\mathrm {e}^{\mathrm {i}(\chi -2{\rm \pi} /3)}]$ and
$L_2 := [\mathrm {e}^{\mathrm {i}(\chi +2{\rm \pi} /3)},\mathrm {e}^{\mathrm {i}(\chi -2{\rm \pi} /3)}]$ and  $L_3 := [\mathrm {e}^{\mathrm {i}(\chi -2{\rm i}{\rm \pi} /3)},\mathrm {e}^{\mathrm {i}\chi }]$. These segments can be individually parameterized as
$L_3 := [\mathrm {e}^{\mathrm {i}(\chi -2{\rm i}{\rm \pi} /3)},\mathrm {e}^{\mathrm {i}\chi }]$. These segments can be individually parameterized as
 \begin{equation} z(s) = \mathrm{e}^{\mathrm{i}\chi}\begin{cases} 1-\mathrm{e}^{-\mathrm{i}{\rm \pi} /6}s & \quad \text{for $L_1$,}\\ \mathrm{e}^{2{\rm i}{\rm \pi}/3} -\mathrm{i} s & \quad \text{for $L_2$,}\\ \mathrm{e}^{{-}2{\rm i}{\rm \pi} /3}+\mathrm{e}^{\mathrm{i}{\rm \pi} /6}s & \quad \text{for $L_3$,}\\ \end{cases} \end{equation}
\begin{equation} z(s) = \mathrm{e}^{\mathrm{i}\chi}\begin{cases} 1-\mathrm{e}^{-\mathrm{i}{\rm \pi} /6}s & \quad \text{for $L_1$,}\\ \mathrm{e}^{2{\rm i}{\rm \pi}/3} -\mathrm{i} s & \quad \text{for $L_2$,}\\ \mathrm{e}^{{-}2{\rm i}{\rm \pi} /3}+\mathrm{e}^{\mathrm{i}{\rm \pi} /6}s & \quad \text{for $L_3$,}\\ \end{cases} \end{equation}
where  $s\in [0, \sqrt {3}]$ is the corresponding arclength. The arclength is then discretized and the corresponding integrals are evaluated numerically for given
$s\in [0, \sqrt {3}]$ is the corresponding arclength. The arclength is then discretized and the corresponding integrals are evaluated numerically for given  $\chi$,
$\chi$,  $\gamma$ and
$\gamma$ and  $w$ – we use numerical quadrature using MATLAB.
$w$ – we use numerical quadrature using MATLAB.
Note that the Schwarz–Christoffel mapping in (5.2) must be inverted numerically in order to evaluate (B4). This is known to be numerically challenging (Driscoll & Trefethen Reference Driscoll and Trefethen2002). To alleviate this issue, we use the Schwarz–Christoffel toolbox by Driscoll (Reference Driscoll1996).
B.3. Example 3
In the third example,  $\partial D$ denotes the unit circle,
$\partial D$ denotes the unit circle,  $|z|=1$, and the anchoring angle,
$|z|=1$, and the anchoring angle,  $\phi$, is given by (6.1) with
$\phi$, is given by (6.1) with  $z'(s)=\mathrm {i} z$. Inserting these expressions along with the unit circle's Schwarz function,
$z'(s)=\mathrm {i} z$. Inserting these expressions along with the unit circle's Schwarz function,  $\bar {z}=1/z$, and
$\bar {z}=1/z$, and  $P=2{\rm \pi}$ into (B1) yields the contour integral
$P=2{\rm \pi}$ into (B1) yields the contour integral
 \begin{align} \hat{\mathcal{E}} = \frac{\rm \pi}{2}w +\frac{1}{4}\operatorname{Im}\left[-\oint_{|z|=1} \bar{\varOmega}( 1/z) \varOmega'(z)\,\mathrm{d} z+w\left(\int_{\partial D_1}-\int_{\partial D_2}\right)\,\mathrm{e}^{\varOmega(z)-\bar{\varOmega}(1/ z)}z \mathrm{d} z\right], \end{align}
\begin{align} \hat{\mathcal{E}} = \frac{\rm \pi}{2}w +\frac{1}{4}\operatorname{Im}\left[-\oint_{|z|=1} \bar{\varOmega}( 1/z) \varOmega'(z)\,\mathrm{d} z+w\left(\int_{\partial D_1}-\int_{\partial D_2}\right)\,\mathrm{e}^{\varOmega(z)-\bar{\varOmega}(1/ z)}z \mathrm{d} z\right], \end{align}
where  $\partial D_1$ and
$\partial D_1$ and  $\partial D_2$ denote the segments of
$\partial D_2$ denote the segments of  $\partial D$ which are subject to tangential anchoring,
$\partial D$ which are subject to tangential anchoring,  $|\arg [z \mathrm {e}^{-\mathrm {i} \beta }]|<\alpha /2$, and normal anchoring,
$|\arg [z \mathrm {e}^{-\mathrm {i} \beta }]|<\alpha /2$, and normal anchoring,  $|\arg [z \mathrm {e}^{-\mathrm {i} \beta }]|>\alpha /2$, respectively.
$|\arg [z \mathrm {e}^{-\mathrm {i} \beta }]|>\alpha /2$, respectively.
The complex director angle,  $\varOmega (z)$, was determined in the main text to be
$\varOmega (z)$, was determined in the main text to be
 \begin{equation} \mathrm{e}^{\varOmega(z)}= z^{{-}2}(z-\rho \,\mathrm{e}^{-\mathrm{i}\beta}) \sqrt{(z -\rho \,\mathrm{e}^{\mathrm{i}(\beta+\alpha/2)})(z-\rho \,\mathrm{e}^{\mathrm{i}(\beta-\alpha/2)})}, \end{equation}
\begin{equation} \mathrm{e}^{\varOmega(z)}= z^{{-}2}(z-\rho \,\mathrm{e}^{-\mathrm{i}\beta}) \sqrt{(z -\rho \,\mathrm{e}^{\mathrm{i}(\beta+\alpha/2)})(z-\rho \,\mathrm{e}^{\mathrm{i}(\beta-\alpha/2)})}, \end{equation}
where the complex square root is defined such that it is of principal value with its branch cut spanning the arc  $z\in [\rho \,\mathrm {e}^{\mathrm {i}(\beta -\alpha /2)}, \rho \,\mathrm {e}^{\mathrm {i}(\beta +\alpha /2)}]$.
$z\in [\rho \,\mathrm {e}^{\mathrm {i}(\beta -\alpha /2)}, \rho \,\mathrm {e}^{\mathrm {i}(\beta +\alpha /2)}]$.
We shall begin by considering the first integral in (B6). Since  $0\leq \rho <1$, it follows immediately from (B7) that
$0\leq \rho <1$, it follows immediately from (B7) that  $\bar {\varOmega }(1/z)$ is holomorphic inside
$\bar {\varOmega }(1/z)$ is holomorphic inside  $|z|=1$. We, hence, find that the integrand,
$|z|=1$. We, hence, find that the integrand,  $\bar {\varOmega }(1/z)\varOmega '(z)$, is holomorphic in
$\bar {\varOmega }(1/z)\varOmega '(z)$, is holomorphic in  $|z|\leq 1$ except for three simple poles. These poles correspond to the three defects on the effective cylinder:
$|z|\leq 1$ except for three simple poles. These poles correspond to the three defects on the effective cylinder:  $z=\rho \,\mathrm {e}^{-\mathrm {i}\beta }$,
$z=\rho \,\mathrm {e}^{-\mathrm {i}\beta }$,  $z= \rho \,\mathrm {e}^{\mathrm {i}(\beta +\alpha /2)}$ and
$z= \rho \,\mathrm {e}^{\mathrm {i}(\beta +\alpha /2)}$ and  $z=\rho \,\mathrm {e}^{\mathrm {i}(\beta -\alpha /2)}$. (Note that the fourth defect,
$z=\rho \,\mathrm {e}^{\mathrm {i}(\beta -\alpha /2)}$. (Note that the fourth defect,  $z=0$, is a removable singularity and so can be ignored.) It, thus, follows from Cauchy's residue theorem that
$z=0$, is a removable singularity and so can be ignored.) It, thus, follows from Cauchy's residue theorem that
 \begin{align} &\operatorname{Im}\left[ \oint_{|z|=1} \bar{\varOmega}( 1/z) \varOmega'(z)\,\mathrm{d} z \right]= 3{\rm \pi}\log|1-\rho^2|+{\rm \pi}\log|1-\rho^2 \,\mathrm{e}^{\mathrm{i} \alpha}| \nonumber\\ &\quad +2{\rm \pi}\log|1-\rho^2 \, \mathrm{e}^{\mathrm{i}(2\beta+\alpha/2)}| +2{\rm \pi}\log|1-\rho^2 \, \mathrm{e}^{\mathrm{i}(2\beta-\alpha/2)}|. \end{align}
\begin{align} &\operatorname{Im}\left[ \oint_{|z|=1} \bar{\varOmega}( 1/z) \varOmega'(z)\,\mathrm{d} z \right]= 3{\rm \pi}\log|1-\rho^2|+{\rm \pi}\log|1-\rho^2 \,\mathrm{e}^{\mathrm{i} \alpha}| \nonumber\\ &\quad +2{\rm \pi}\log|1-\rho^2 \, \mathrm{e}^{\mathrm{i}(2\beta+\alpha/2)}| +2{\rm \pi}\log|1-\rho^2 \, \mathrm{e}^{\mathrm{i}(2\beta-\alpha/2)}|. \end{align}The latter two integrals in (B6) cannot be evaluated using Cauchy's residue theorem since the contours reside on different Riemann sheets of the integrand. Instead we evaluate the integrals numerically by discretizing the unit circle and applying quadrature in MATLAB. Note that extra care must be taken to ensure the principal value square root is used here.




































































 Open access
Open access