



No CrossRef data available.
Published online by Cambridge University Press: 23 October 2024
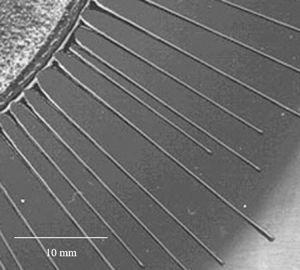
Melt-front instabilities during the combustion of a spinning polymethylmethacrylate disk in air are investigated. Mainly straight rivulet-type flow patterns were found, though under certain conditions saw-tooth patterns were observed. The measured wavelengths of the instabilities agree with earlier theoretical predictions of driven contact-line instabilities.