





Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Stewart, Jason R.
and
Bridges, Patrick G.
2024.
Beatnik: A Novel Global Communication Mini-Application.
p.
448.
Qi, Han
He, Zhi-wei
Xu, Ai-guo
and
Zhang, You-sheng
2024.
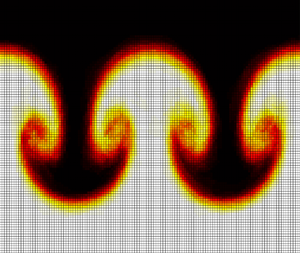
The vortex structure and enstrophy of the mixing transition induced by Rayleigh–Taylor instability.
Physics of Fluids,
Vol. 36,
Issue. 11,