



No CrossRef data available.
Published online by Cambridge University Press: 04 March 2024
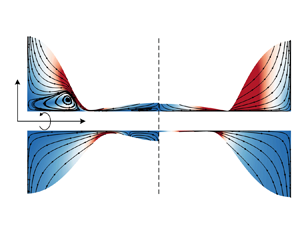
To investigate the influence of inertia and slip on the instability of a liquid film on a fibre, a theoretical framework based on the axisymmetric Navier–Stokes equations is proposed via linear instability analysis. The model reveals that slip significantly enhances perturbation growth in viscous film flows, whereas it exerts minimal influence on flows dominated by inertia. Moreover, under no-slip boundary conditions, the dominant instability mode of thin films remains unaltered by inertia, closely aligning with predictions from a no-slip lubrication model. Conversely, when slip is introduced, the dominant wavenumber experiences a noticeable reduction as inertia decreases. This trend is captured by an introduced lubrication model with giant slip. Direct numerical simulations of the Navier–Stokes equations are then performed to further confirm the theoretical findings at the linear stage. For the nonlinear dynamics, no-slip simulations show complex vortical structures within films, driven by fluid inertia near surfaces. Additionally, in scenarios with weak inertia, a reduction in the volume of satellite droplets is observed due to slip, following a power-law relationship.