








Crossref Citations
This article has been cited by the following publications. This list is generated based on data provided by Crossref.
Shirani Faradonbeh, E.
Sohankar, A.
and
Dehghan Manshadi, M.
2025.
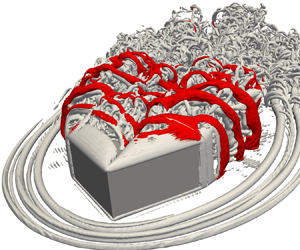
Experimental and LES investigations of horseshoe vortex characteristics in wall-mounted rectangular cylinders for various angles of incidence.
Ocean Engineering,
Vol. 315,
Issue. ,
p.
119810.