



1. Introduction
Many processes of geophysical and astrophysical interest entail the interaction of magnetic fields with conducting fluids or plasma. The dynamo effect is responsible for the self-excitation of magnetic fields in planets, stars and galaxies (Rincon Reference Rincon2019). A key player in cosmic structure formation is the magnetorotational instability (MRI, Balbus & Hawley Reference Balbus and Hawley1998), which triggers outward transport of angular momentum in accretion disks and mass concentration onto central objects. While dynamo action and MRI are usually considered as separate effects, they are treated as nonlinearly interwoven and mutually reinforcing processes in the modern concept of MRI dynamos (Rincon Reference Rincon2019; Mamatsashvili et al. Reference Mamatsashvili, Chagelishvili, Pessah, Stefani and Bodo2020).
Over the last two decades, a great deal of theoretical and numerical work on dynamo action and MRI has been complemented by a number of pertinent experiments (Stefani, Gailitis & Gerbeth Reference Stefani, Gailitis and Gerbeth2008). The threshold of self-excitation was achieved in the liquid sodium experiments in Riga (Gailitis et al. Reference Gailitis, Gerbeth, Gundrum, Lielausis, Lipsbergs, Platacis and Stefani2018), Karlsruhe (Müller et al. Reference Müller, Stieglitz, Busse and Tilgner2008) and Cadarache (Monchaux et al. Reference Monchaux2009). The helical (Stefani et al. Reference Stefani, Gundrum, Gerbeth, Rüdiger, Schultz, Szklarski and Hollerbach2006) and azimuthal (Seilmayer et al. Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014) variants of MRI were observed in the medium-size PROMISE experiment, while an unequivocal proof of the standard MRI (with an imposed purely axial magnetic field) is still missing, despite great efforts and promising initial results (Sisan et al. Reference Sisan, Mujica, Tillotson, Huang, Dorland, Hassam, Antonsen and Lathrop2004; Nornberg et al. Reference Nornberg, Ji, Schartman, Roach and Goodman2010).
Interestingly, these experimental efforts brought to the fore the distinction between convective, absolute and global instabilities, which are well known in the hydrodynamics and plasma physics communities (e.g. Huerre & Monkewitz Reference Huerre and Monkewitz1990; Chomaz Reference Chomaz2005) but are seldom addressed in geophysical and astrophysical magnetohydrodynamics (MHD) (however, see Tobias, Proctor & Knobloch (Reference Tobias, Proctor and Knobloch1997) for a possible application to the solar dynamo). It was key for the success of the Riga experiment to transform the convective instability of the paradigmatic Ponomarenko (Reference Ponomarenko1973) dynamo (a conducting rigid rod, moving in a screw-like manner through an infinitely extended medium with the same conductivity) into an absolute (and a global) one by adding a concentric outer return flow to the inner motion of the rod. The corresponding one-dimensional (1D) eigenvalue problem in the radial direction and the search for saddle points in the complex wavenumber plane, representing the absolute instability, are described in Gailitis (Reference Gailitis1996). In this case, the absolute instability for the finite-length system coincided quite accurately with the global instability that was later obtained with a two-dimensional code (Stefani, Gerbeth & Gailitis Reference Stefani, Gerbeth and Gailitis1999). A similar distinction between convective, absolute and global instabilities was discussed for the helical MRI (HMRI) experiment PROMISE (Priede & Gerbeth Reference Priede and Gerbeth2009; Stefani et al. Reference Stefani, Gerbeth, Gundrum, Hollerbach, Priede, Rüdiger and Szklarski2009). In contrast to the Riga dynamo, where this distinction obviously stems from the axial flow through the device, the axial propagation of the unstable HMRI mode is tied to the direction of the background Poynting flux (Liu et al. Reference Liu, Goodman, Herron and Ji2006).
This paper is concerned with a related MRI problem for which the relevance of distinguishing among convective, absolute and global instabilities is far less evident. The azimuthal MRI (AMRI, Hollerbach, Teeluck & Rüdiger Reference Hollerbach, Teeluck and Rüdiger2010) is a non-axisymmetric instability, with dominant azimuthal wavenumbers  $m=\pm 1$, arising in a (hydrodynamically stable) differentially rotating flow in the presence of a purely azimuthal magnetic field. While any weak additional axial field would naturally result in a preferred direction and preponderance of either the
$m=\pm 1$, arising in a (hydrodynamically stable) differentially rotating flow in the presence of a purely azimuthal magnetic field. While any weak additional axial field would naturally result in a preferred direction and preponderance of either the  $m=1$ or
$m=1$ or  $m=-1$ mode, with no axial field these two modes have the same weight and it might be naively expected that they add up to a standing wave. Under this assumption, the two interpenetrating upward and downward travelling waves, as observed experimentally in Seilmayer et al. (Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014), were interpreted in terms of the breaking of the axial homogeneity by the endcaps of the cylindrical Taylor–Couette (TC) device of PROMISE. However, we will show in this paper that the tendency of AMRI waves to travel away from the mid-height of the cylinders, exhibiting a butterfly-like spatio-temporal variation (analogous to the famous ‘butterfly diagram’ in solar physics), has a deeper rooting, as it occurs already in a TC flow that is infinitely extended in the axial direction.
$m=-1$ mode, with no axial field these two modes have the same weight and it might be naively expected that they add up to a standing wave. Under this assumption, the two interpenetrating upward and downward travelling waves, as observed experimentally in Seilmayer et al. (Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014), were interpreted in terms of the breaking of the axial homogeneity by the endcaps of the cylindrical Taylor–Couette (TC) device of PROMISE. However, we will show in this paper that the tendency of AMRI waves to travel away from the mid-height of the cylinders, exhibiting a butterfly-like spatio-temporal variation (analogous to the famous ‘butterfly diagram’ in solar physics), has a deeper rooting, as it occurs already in a TC flow that is infinitely extended in the axial direction.
2. Mathematical formulation
The set-up is that of an infinitely long TC flow of a conducting fluid in cylindrical coordinates  $(r, \phi , z)$ with an imposed purely azimuthal magnetic field, which is usually adopted in AMRI studies. The inner and outer cylinders, with radii
$(r, \phi , z)$ with an imposed purely azimuthal magnetic field, which is usually adopted in AMRI studies. The inner and outer cylinders, with radii  $r_{i}$ and
$r_{i}$ and  $r_{o}$, respectively, rotate with angular velocities
$r_{o}$, respectively, rotate with angular velocities  $\varOmega _{i}$ and
$\varOmega _{i}$ and  $\varOmega _{o}$ around the
$\varOmega _{o}$ around the  $z$-axis, driving in the gap between them an azimuthal velocity,
$z$-axis, driving in the gap between them an azimuthal velocity,  ${\boldsymbol {u}}_0=r\varOmega (r){\boldsymbol {e}}_{\phi }$, with the radial profile of the angular velocity
${\boldsymbol {u}}_0=r\varOmega (r){\boldsymbol {e}}_{\phi }$, with the radial profile of the angular velocity  $\varOmega (r)= C_1+C_2/r^{2}$, where
$\varOmega (r)= C_1+C_2/r^{2}$, where  $C_1=(r_o^{2}\varOmega _o-r_i^{2}\varOmega _i)/(r_o^{2}-r_i^{2})$ and
$C_1=(r_o^{2}\varOmega _o-r_i^{2}\varOmega _i)/(r_o^{2}-r_i^{2})$ and  $C_2=(\varOmega _i-\varOmega _o)r_i^{2}r_o^{2}/(r_o^{2}-r_i^{2})$. The ratio of the inner to the outer radius is
$C_2=(\varOmega _i-\varOmega _o)r_i^{2}r_o^{2}/(r_o^{2}-r_i^{2})$. The ratio of the inner to the outer radius is  $r_i/r_o=0.5$, as in PROMISE. The fluid has constant viscosity
$r_i/r_o=0.5$, as in PROMISE. The fluid has constant viscosity  $\nu$ and magnetic diffusivity
$\nu$ and magnetic diffusivity  $\eta$ characterized by Reynolds,
$\eta$ characterized by Reynolds,  $Re=\varOmega _ir_i^{2}/\nu$, and magnetic Reynolds,
$Re=\varOmega _ir_i^{2}/\nu$, and magnetic Reynolds,  $Rm=\varOmega _ir_i^{2}/\eta$, numbers. The magnetic Prandtl number
$Rm=\varOmega _ir_i^{2}/\eta$, numbers. The magnetic Prandtl number  $Pm=Rm/Re=1.4\times 10^{-6}$ is that of GaInSn used in PROMISE (Stefani et al. Reference Stefani, Gerbeth, Gundrum, Hollerbach, Priede, Rüdiger and Szklarski2009). In the latter experiment, the imposed azimuthal magnetic field is current-free,
$Pm=Rm/Re=1.4\times 10^{-6}$ is that of GaInSn used in PROMISE (Stefani et al. Reference Stefani, Gerbeth, Gundrum, Hollerbach, Priede, Rüdiger and Szklarski2009). In the latter experiment, the imposed azimuthal magnetic field is current-free,  $\boldsymbol {B}_0=B_0(r_i/r)\boldsymbol {e}_{\phi }$, where
$\boldsymbol {B}_0=B_0(r_i/r)\boldsymbol {e}_{\phi }$, where  $B_0$ is constant; here we adopt the same configuration of the field as well. The effect of the field is quantified by the Hartmann number
$B_0$ is constant; here we adopt the same configuration of the field as well. The effect of the field is quantified by the Hartmann number  $Ha=B_0r_i/\sqrt {\rho \mu \nu \eta }$, where
$Ha=B_0r_i/\sqrt {\rho \mu \nu \eta }$, where  $\rho$ is the constant density and
$\rho$ is the constant density and  $\mu$ is the magnetic permeability. We focus on the Rayleigh stable regime,
$\mu$ is the magnetic permeability. We focus on the Rayleigh stable regime,  $\varOmega _o/\varOmega _i > (r_i/r_o)^{2}=0.25$, with the fixed ratio of the cylinders’ rotation rates
$\varOmega _o/\varOmega _i > (r_i/r_o)^{2}=0.25$, with the fixed ratio of the cylinders’ rotation rates  $\varOmega _o/\varOmega _i=0.26$, so that only magnetic instabilities can develop in the flow.
$\varOmega _o/\varOmega _i=0.26$, so that only magnetic instabilities can develop in the flow.
About the above equilibrium TC flow, we consider small perturbations of velocity,  $\boldsymbol {u}$, total (thermal plus magnetic) pressure,
$\boldsymbol {u}$, total (thermal plus magnetic) pressure,  $p$, and magnetic field,
$p$, and magnetic field,  $\boldsymbol {b}$, which are all functions of the radius
$\boldsymbol {b}$, which are all functions of the radius  $r$ and depend on time
$r$ and depend on time  $t$, azimuthal
$t$, azimuthal  $\phi$ and axial
$\phi$ and axial  $z$ coordinates as a normal mode
$z$ coordinates as a normal mode  $\propto \exp (\gamma t+\textrm {i}m\phi +\textrm {i}k_zz)$, where
$\propto \exp (\gamma t+\textrm {i}m\phi +\textrm {i}k_zz)$, where  $\gamma$ is the (complex) eigenvalue, while
$\gamma$ is the (complex) eigenvalue, while  $k_z$ and the integer
$k_z$ and the integer  $m$ are the axial and azimuthal wavenumbers, respectively. The flow is unstable if the real part (growth rate) of any eigenvalue is positive, i.e.
$m$ are the axial and azimuthal wavenumbers, respectively. The flow is unstable if the real part (growth rate) of any eigenvalue is positive, i.e.  $\textrm {Re}(\gamma ) > 0$. Henceforth, we normalize length by
$\textrm {Re}(\gamma ) > 0$. Henceforth, we normalize length by  $r_i$, time by
$r_i$, time by  $\varOmega _{i}^{-1}$,
$\varOmega _{i}^{-1}$,  $\gamma$ and
$\gamma$ and  $\varOmega (r)$ by
$\varOmega (r)$ by  $\varOmega _i$,
$\varOmega _i$,  $\boldsymbol {u}$ by
$\boldsymbol {u}$ by  $\varOmega _ir_i$,
$\varOmega _ir_i$,  $p$ by
$p$ by  $\rho r_i^{2}\varOmega _i^{2}$,
$\rho r_i^{2}\varOmega _i^{2}$,  $\boldsymbol {B}_0$ by
$\boldsymbol {B}_0$ by  $B_0$ and
$B_0$ and  $\boldsymbol {b}$ by
$\boldsymbol {b}$ by  $Rm\cdot B_0$. Substituting these non-dimensional quantities in the basic non-ideal MHD equations and linearizing them, we get the perturbation equations in non-dimensional form as well (e.g. Kirillov, Stefani & Fukumoto Reference Kirillov, Stefani and Fukumoto2014; Rüdiger et al. Reference Rüdiger, Gellert, Hollerbach, Schultz and Stefani2018):
$Rm\cdot B_0$. Substituting these non-dimensional quantities in the basic non-ideal MHD equations and linearizing them, we get the perturbation equations in non-dimensional form as well (e.g. Kirillov, Stefani & Fukumoto Reference Kirillov, Stefani and Fukumoto2014; Rüdiger et al. Reference Rüdiger, Gellert, Hollerbach, Schultz and Stefani2018):
 $$\begin{gather} (\gamma + \textrm{i}m\varOmega)\boldsymbol{u}+2\varOmega \boldsymbol{e}_z\times\boldsymbol{u}+r\varOmega' u_r\boldsymbol{e}_{\phi}={-}\boldsymbol{\nabla} p+\frac{Ha^{2}}{Re}\frac{\textrm{i}m}{r^{2}}\boldsymbol{b}-\frac{Ha^{2}}{Re}\frac{2}{r^{2}}b_{\phi}\boldsymbol{e}_r+ \frac{1}{Re}\nabla^{2}\boldsymbol{u}, \end{gather}$$
$$\begin{gather} (\gamma + \textrm{i}m\varOmega)\boldsymbol{u}+2\varOmega \boldsymbol{e}_z\times\boldsymbol{u}+r\varOmega' u_r\boldsymbol{e}_{\phi}={-}\boldsymbol{\nabla} p+\frac{Ha^{2}}{Re}\frac{\textrm{i}m}{r^{2}}\boldsymbol{b}-\frac{Ha^{2}}{Re}\frac{2}{r^{2}}b_{\phi}\boldsymbol{e}_r+ \frac{1}{Re}\nabla^{2}\boldsymbol{u}, \end{gather}$$ $$\begin{gather}Rm(\gamma+\textrm{i}m\varOmega)\boldsymbol{b}= \frac{\textrm{i}m}{r^{2}}\boldsymbol{u}+Rm\boldsymbol{\cdot} r\varOmega'b_r\boldsymbol{e}_{\phi}+\frac{2}{r^{2}}u_r\boldsymbol{e}_{\phi} +\nabla^{2}\boldsymbol{b}, \end{gather}$$
$$\begin{gather}Rm(\gamma+\textrm{i}m\varOmega)\boldsymbol{b}= \frac{\textrm{i}m}{r^{2}}\boldsymbol{u}+Rm\boldsymbol{\cdot} r\varOmega'b_r\boldsymbol{e}_{\phi}+\frac{2}{r^{2}}u_r\boldsymbol{e}_{\phi} +\nabla^{2}\boldsymbol{b}, \end{gather}$$ $$\begin{gather}\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u}=0, \quad \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{b}=0, \end{gather}$$
$$\begin{gather}\boldsymbol{\nabla}\boldsymbol{\cdot}\boldsymbol{u}=0, \quad \boldsymbol{\nabla}\boldsymbol{\cdot} \boldsymbol{b}=0, \end{gather}$$
where  $\varOmega '=\textrm {d}\varOmega /\textrm {d}r$. Equations (2.1)–(2.3a,b), together with the adopted no-slip condition for the velocity and perfect-conductor condition for the magnetic field at the cylinder surfaces, constitute the eigenvalue problem describing AMRI in the magnetized TC flow (Hollerbach et al. Reference Hollerbach, Teeluck and Rüdiger2010). Solving this problem yields the corresponding dispersion relation
$\varOmega '=\textrm {d}\varOmega /\textrm {d}r$. Equations (2.1)–(2.3a,b), together with the adopted no-slip condition for the velocity and perfect-conductor condition for the magnetic field at the cylinder surfaces, constitute the eigenvalue problem describing AMRI in the magnetized TC flow (Hollerbach et al. Reference Hollerbach, Teeluck and Rüdiger2010). Solving this problem yields the corresponding dispersion relation  $\gamma (m,k_z)$ and the radial structure of the AMRI modes. Since AMRI is dominated by non-axisymmetric
$\gamma (m,k_z)$ and the radial structure of the AMRI modes. Since AMRI is dominated by non-axisymmetric  $m=\pm 1$ modes (Hollerbach et al. Reference Hollerbach, Teeluck and Rüdiger2010; Rüdiger et al. Reference Rüdiger, Gellert, Hollerbach, Schultz and Stefani2018), we focus on these modes in this paper.
$m=\pm 1$ modes (Hollerbach et al. Reference Hollerbach, Teeluck and Rüdiger2010; Rüdiger et al. Reference Rüdiger, Gellert, Hollerbach, Schultz and Stefani2018), we focus on these modes in this paper.
Until now, AMRI has been extensively investigated, both with global 1D and local Wentzel–Kramers–Brillouin (WKB) approaches, but only as a convective instability (e.g. Hollerbach et al. Reference Hollerbach, Teeluck and Rüdiger2010; Kirillov et al. Reference Kirillov, Stefani and Fukumoto2014; Rüdiger et al. Reference Rüdiger, Gellert, Hollerbach, Schultz and Stefani2018). These studies formed the basis for understanding the first experimental manifestations of AMRI (Seilmayer et al. Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014). As mentioned above, however, these experiments revealed a notable feature of the propagation of AMRI modes – the butterfly diagram – which is not captured by the conventional treatment of AMRI as a convective instability. Our main goal is therefore to show, using the concept of absolute instability, that this butterfly-like propagation is in fact rooted in the dynamics of AMRI itself rather than being induced by the top and bottom boundaries (endcaps) of the TC device.
3. Convective and absolute instabilities – a short overview
In flow systems, one can distinguish two types of instabilities – convective and absolute (Huerre & Monkewitz Reference Huerre and Monkewitz1990; Chomaz Reference Chomaz2005). An instability is convective if the perturbation during growth also propagates in the flow as a travelling wave packet, so that it decays at large times with respect to a fixed point in any reference frame, but continues to grow in the frame co-moving with the group velocity of this packet. By contrast, an instability is absolute when the perturbation grows without limit at every point in the flow. In laboratory experiments, it is usually the absolute instability which is more relevant, and hence of greater interest, than the convective instability. An experimental device containing the flow, to which the laboratory frame is attached, has finite size. As a result, the convective instability may be rapidly carried out of the system before attaining the growth sufficient for detection, whereas the absolute instability always stays within the system, exhibiting sustained growth detectable in experiments.
The convective instability is determined by a standard procedure of linear modal stability analysis, that is, by considering the dispersion relation at real wavenumbers  $k$ and finding the real (growth rate) and imaginary (frequency) parts of
$k$ and finding the real (growth rate) and imaginary (frequency) parts of  $\gamma$ (e.g. Rüdiger et al. Reference Rüdiger, Gellert, Hollerbach, Schultz and Stefani2018). In general, this yields some non-zero group velocity for the unstable modes. Determining the absolute instability is more delicate, as it requires finding such a combination of convectively unstable modes, which forms growing perturbations (wave packets) with zero group velocity in the laboratory frame, and hence remains in the flow. This is achieved mathematically by considering complex wavenumbers
$\gamma$ (e.g. Rüdiger et al. Reference Rüdiger, Gellert, Hollerbach, Schultz and Stefani2018). In general, this yields some non-zero group velocity for the unstable modes. Determining the absolute instability is more delicate, as it requires finding such a combination of convectively unstable modes, which forms growing perturbations (wave packets) with zero group velocity in the laboratory frame, and hence remains in the flow. This is achieved mathematically by considering complex wavenumbers  $k$ (
$k$ ( $k$ is the wavenumber in the propagation direction of convective instability, which is along the
$k$ is the wavenumber in the propagation direction of convective instability, which is along the  $z$-axis in the present case), analytically extending the dispersion relation
$z$-axis in the present case), analytically extending the dispersion relation  $\gamma (k)$ from the real
$\gamma (k)$ from the real  $k$-axis to the complex
$k$-axis to the complex  $k$-plane and finding its saddle points
$k$-plane and finding its saddle points  $k_s$ (Gailitis & Freibergs Reference Gailitis and Freibergs1980; Huerre & Monkewitz Reference Huerre and Monkewitz1990; Chomaz Reference Chomaz2005), where the complex derivative satisfies
$k_s$ (Gailitis & Freibergs Reference Gailitis and Freibergs1980; Huerre & Monkewitz Reference Huerre and Monkewitz1990; Chomaz Reference Chomaz2005), where the complex derivative satisfies
 \begin{equation} \left.\frac{\partial \gamma(k)}{\partial k}\right|_{k=k_s}=0, \quad k_s \in \mathbb{C}. \end{equation}
\begin{equation} \left.\frac{\partial \gamma(k)}{\partial k}\right|_{k=k_s}=0, \quad k_s \in \mathbb{C}. \end{equation}
If the real part of the complex  $\gamma$ at
$\gamma$ at  $k=k_s$ is positive,
$k=k_s$ is positive,  $\textrm {Re}(\gamma (k_s)) > 0$, this indicates the presence of the absolute instability, where
$\textrm {Re}(\gamma (k_s)) > 0$, this indicates the presence of the absolute instability, where  $\textrm {Re}(\gamma (k_s))$ is its growth rate and
$\textrm {Re}(\gamma (k_s))$ is its growth rate and  $\omega =\textrm {Im}(\gamma (k_s))$ its frequency. The real part
$\omega =\textrm {Im}(\gamma (k_s))$ its frequency. The real part  $\textrm {Re}(k_s)$ and imaginary part
$\textrm {Re}(k_s)$ and imaginary part  $\textrm {Im}(k_s)$ of
$\textrm {Im}(k_s)$ of  $k_s$ describe, respectively, its oscillations and exponential increase/decrease in space. The condition (3.1) implies that the real group velocity of the absolute instability is zero at
$k_s$ describe, respectively, its oscillations and exponential increase/decrease in space. The condition (3.1) implies that the real group velocity of the absolute instability is zero at  $k_s$, i.e.
$k_s$, i.e.  $\partial \omega /\partial \textrm {Re}(k)|_{k=k_s}=0$, although it can still have a non-zero phase velocity.
$\partial \omega /\partial \textrm {Re}(k)|_{k=k_s}=0$, although it can still have a non-zero phase velocity.
4. Convective and absolute types of AMRI
The AMRI is essentially the instability of inertial waves (Kirillov et al. Reference Kirillov, Stefani and Fukumoto2014), and therefore it was natural in previous studies to regard it as a convective instability and apply a standard technique of modal linear stability analysis, where the axial wavenumber  $k_z$ is real. In this paper, we instead address AMRI within the absolute instability framework, which has not been considered before, and apply the methods described above, where the wavenumber
$k_z$ is real. In this paper, we instead address AMRI within the absolute instability framework, which has not been considered before, and apply the methods described above, where the wavenumber  $k_z$ in the axial
$k_z$ in the axial  $z$-direction, along which AMRI waves travel, is now complex.
$z$-direction, along which AMRI waves travel, is now complex.
4.1. WKB analysis
To obtain an initial insight into the absolute AMRI, we start with the local short-wavelength WKB analysis, in which the radial dependence of the perturbations is of the form  $\exp (\textrm {i}k_rr)$, with a large (real) radial wavenumber
$\exp (\textrm {i}k_rr)$, with a large (real) radial wavenumber  $k_rr_i \gtrsim 1$. Substituting this in (2.1)–(2.3a,b) and using the inductionless limit
$k_rr_i \gtrsim 1$. Substituting this in (2.1)–(2.3a,b) and using the inductionless limit  $Pm \rightarrow 0$, we get an analytical dispersion relation (Kirillov et al. Reference Kirillov, Stefani and Fukumoto2014):
$Pm \rightarrow 0$, we get an analytical dispersion relation (Kirillov et al. Reference Kirillov, Stefani and Fukumoto2014):
 \begin{align} \gamma &={-}\textrm{i}m-\frac{k^{2}}{Re} - (m^{2} + 2\alpha^{2})\frac{{Ha}^{2}}{k^{2} {Re}} \nonumber\\ &\quad+ 2\left[\frac{\alpha^{2}Ha^{2}}{k^{2}Re^{2}}\left((\alpha^{2}+m^{2})\frac{Ha^{2}}{k^{2}} +\textrm{i}m(Ro+2)\right) - (Ro+1)\alpha^{2}\right]^{1/2}, \end{align}
\begin{align} \gamma &={-}\textrm{i}m-\frac{k^{2}}{Re} - (m^{2} + 2\alpha^{2})\frac{{Ha}^{2}}{k^{2} {Re}} \nonumber\\ &\quad+ 2\left[\frac{\alpha^{2}Ha^{2}}{k^{2}Re^{2}}\left((\alpha^{2}+m^{2})\frac{Ha^{2}}{k^{2}} +\textrm{i}m(Ro+2)\right) - (Ro+1)\alpha^{2}\right]^{1/2}, \end{align}
where  $\alpha =k_z/k$,
$\alpha =k_z/k$,  $k^{2}=k_r^{2}+k_z^{2}$ and
$k^{2}=k_r^{2}+k_z^{2}$ and  $Ro = r(2\varOmega )^{-1}\,\textrm {d}\varOmega /\textrm {d}r$ is the Rossby number. Using the conversion formula of Stefani & Kirillov (Reference Stefani and Kirillov2015) for
$Ro = r(2\varOmega )^{-1}\,\textrm {d}\varOmega /\textrm {d}r$ is the Rossby number. Using the conversion formula of Stefani & Kirillov (Reference Stefani and Kirillov2015) for  $\varOmega _o/\varOmega _i=0.26$ in the TC flow, we obtain
$\varOmega _o/\varOmega _i=0.26$ in the TC flow, we obtain  $Ro=-0.97$ in the local case, which is below the lower Liu limit,
$Ro=-0.97$ in the local case, which is below the lower Liu limit,  $Ro_{LLL}=-0.83$, ensuring the presence of AMRI (Kirillov et al. Reference Kirillov, Stefani and Fukumoto2014). Typically, AMRI modes extend over the gap width between the cylinders (see below), so for the effective radial wavenumber we take
$Ro_{LLL}=-0.83$, ensuring the presence of AMRI (Kirillov et al. Reference Kirillov, Stefani and Fukumoto2014). Typically, AMRI modes extend over the gap width between the cylinders (see below), so for the effective radial wavenumber we take  $k_r={\rm \pi} /(r_o-r_i)$ (Ji, Goodman & Kageyama Reference Ji, Goodman and Kageyama2001), though this choice is still somewhat arbitrary.
$k_r={\rm \pi} /(r_o-r_i)$ (Ji, Goodman & Kageyama Reference Ji, Goodman and Kageyama2001), though this choice is still somewhat arbitrary.
Figure 1 shows the solution of the dispersion relation (4.1) for complex  $k_z$ at
$k_z$ at  $Re=1480$,
$Re=1480$,  $m=1$ and different
$m=1$ and different  $Ha$. (The
$Ha$. (The  $m=-1$ case is similar except that the two growth areas swap their
$m=-1$ case is similar except that the two growth areas swap their  $\textrm {Im}(k_z)$ values in the
$\textrm {Im}(k_z)$ values in the  $k_z$-plane, so we do not show it here; see § 4.2.) At smaller
$k_z$-plane, so we do not show it here; see § 4.2.) At smaller  $Ha$, there are two separate areas of positive
$Ha$, there are two separate areas of positive  $\textrm {Re}(\gamma )\geqslant 0$; however, as yet, neither crosses the
$\textrm {Re}(\gamma )\geqslant 0$; however, as yet, neither crosses the  $\textrm {Re}(k_z)$-axis (red dashed lines in figure 1), implying that there is no genuine instability in the flow. With increasing
$\textrm {Re}(k_z)$-axis (red dashed lines in figure 1), implying that there is no genuine instability in the flow. With increasing  $Ha$, the lower area first crosses the
$Ha$, the lower area first crosses the  $\textrm {Re}(k_z)$-axis, indicating the onset of the convective AMRI, and then extends into the upper half of the
$\textrm {Re}(k_z)$-axis, indicating the onset of the convective AMRI, and then extends into the upper half of the  $k_z$-plane, which is shown at
$k_z$-plane, which is shown at  $Ha=20$ in figure 1(a). At
$Ha=20$ in figure 1(a). At  $Ha=27.407$, the boundaries (
$Ha=27.407$, the boundaries ( $\textrm {Re}(\gamma )=0$) of these two areas touch each other, forming a saddle point
$\textrm {Re}(\gamma )=0$) of these two areas touch each other, forming a saddle point  $k_{z,s}$ according to condition (3.1), which is seen as a cusp in figure 1(b). This saddle point, still being marginally stable (
$k_{z,s}$ according to condition (3.1), which is seen as a cusp in figure 1(b). This saddle point, still being marginally stable ( $\textrm {Re}(\gamma (k_{z,s}))=0$), represents the emerging absolute AMRI. It further develops by increasing its growth rate and spreading towards the lower half of the
$\textrm {Re}(\gamma (k_{z,s}))=0$), represents the emerging absolute AMRI. It further develops by increasing its growth rate and spreading towards the lower half of the  $k_z$-plane, as the two areas merge more with increasing
$k_z$-plane, as the two areas merge more with increasing  $Ha$. For example, at
$Ha$. For example, at  $Ha=110$ in figure 1(c), the saddle point associated with the absolute AMRI mode is at
$Ha=110$ in figure 1(c), the saddle point associated with the absolute AMRI mode is at  $k_{z,s}=(5.08, -1.39)$ (red cross). It has the growth rate
$k_{z,s}=(5.08, -1.39)$ (red cross). It has the growth rate  $\textrm {Re}(\gamma (k_{z,s}))=0.07$ and frequency
$\textrm {Re}(\gamma (k_{z,s}))=0.07$ and frequency  $\textrm {Im}(\gamma (k_{z,s}))=-0.5$. At higher
$\textrm {Im}(\gamma (k_{z,s}))=-0.5$. At higher  $Ha$, the saddle point and hence the absolute AMRI disappear, but the convective instability along the
$Ha$, the saddle point and hence the absolute AMRI disappear, but the convective instability along the  $\textrm {Re}(k_z)$-axis may still remain, as shown in figure 1(d). Eventually, the convective AMRI also vanishes after some maximum
$\textrm {Re}(k_z)$-axis may still remain, as shown in figure 1(d). Eventually, the convective AMRI also vanishes after some maximum  $Ha$ is exceeded, as the growth areas move away from the
$Ha$ is exceeded, as the growth areas move away from the  $\textrm {Re}(k_z)$-axis; see figure 1(e).
$\textrm {Re}(k_z)$-axis; see figure 1(e).

Figure 1. (a–e) The areas of growth,  $\textrm {Re}(\gamma )>0$, in the
$\textrm {Re}(\gamma )>0$, in the  $k_z$-plane, obtained from the WKB dispersion relation (4.1) for fixed
$k_z$-plane, obtained from the WKB dispersion relation (4.1) for fixed  $Re=1480, m=1$,
$Re=1480, m=1$,  $Ro=-0.97$ and different
$Ro=-0.97$ and different  $Ha$. The red cross in (c) denotes the saddle point at
$Ha$. The red cross in (c) denotes the saddle point at  $k_{z,s}=(5.08, -1.39)$ – the wavenumber of the absolute AMRI mode with the growth rate
$k_{z,s}=(5.08, -1.39)$ – the wavenumber of the absolute AMRI mode with the growth rate  $\textrm {Re}(\gamma (k_{z,s}))=0.07$. (f) The marginal stability curves for the convective (black dashed line) and absolute (red solid line) AMRI in the
$\textrm {Re}(\gamma (k_{z,s}))=0.07$. (f) The marginal stability curves for the convective (black dashed line) and absolute (red solid line) AMRI in the  $(Ha,Re)$-plane.
$(Ha,Re)$-plane.
The marginal stability ( $\textrm {Re}(\gamma )= 0$) curves for convective (optimized over
$\textrm {Re}(\gamma )= 0$) curves for convective (optimized over  $\textrm {Re}(k_z)$) and absolute AMRI are shown in figure 1(f), with the latter being located inside the former. This implies that the critical
$\textrm {Re}(k_z)$) and absolute AMRI are shown in figure 1(f), with the latter being located inside the former. This implies that the critical  $Ha$ and
$Ha$ and  $Re$ for the excitation of the convective AMRI are typically lower than those for the absolute AMRI. This can be graphically understood from figures 1(a)–1(e). One of the two growth areas, approaching from the upper or lower half of the
$Re$ for the excitation of the convective AMRI are typically lower than those for the absolute AMRI. This can be graphically understood from figures 1(a)–1(e). One of the two growth areas, approaching from the upper or lower half of the  $k_z$-plane, first overlaps the
$k_z$-plane, first overlaps the  $\textrm {Re}(k_z)$-axis at certain
$\textrm {Re}(k_z)$-axis at certain  $Ha$ for a given
$Ha$ for a given  $Re$, which lies on the black dashed curve in figure 1(f), indicating the onset of the convective AMRI. These two growth areas then touch each other at some larger
$Re$, which lies on the black dashed curve in figure 1(f), indicating the onset of the convective AMRI. These two growth areas then touch each other at some larger  $Ha$ that lies on the red curve in figure 1(f), indicating the onset of the absolute AMRI. If the saddle point lies on the
$Ha$ that lies on the red curve in figure 1(f), indicating the onset of the absolute AMRI. If the saddle point lies on the  $\textrm {Re}(k_z)$-axis, then the marginal stability curves for convective and absolute AMRI coincide.
$\textrm {Re}(k_z)$-axis, then the marginal stability curves for convective and absolute AMRI coincide.
4.2. 1D analysis
Now we present the solution of the 1D linear eigenvalue problem in the  $k_z$-plane. The eigenvalues
$k_z$-plane. The eigenvalues  $\gamma$ and the radial structure of the associated eigenmodes are found using a spectral collocation method based on Chebyshev polynomials (up to
$\gamma$ and the radial structure of the associated eigenmodes are found using a spectral collocation method based on Chebyshev polynomials (up to  $N=30 - 40$), whereby (2.1)–(2.3a,b), supplemented with the boundary conditions as described in § 2, are reduced to a large (
$N=30 - 40$), whereby (2.1)–(2.3a,b), supplemented with the boundary conditions as described in § 2, are reduced to a large ( $4N\times 4N$) matrix eigenvalue problem (see code details in Hollerbach et al. Reference Hollerbach, Teeluck and Rüdiger2010).
$4N\times 4N$) matrix eigenvalue problem (see code details in Hollerbach et al. Reference Hollerbach, Teeluck and Rüdiger2010).
Figures 2(a)–2(e) show the resulting growth areas in the  $k_z$-plane at the same
$k_z$-plane at the same  $Re=1480$,
$Re=1480$,  $m=1$ and different
$m=1$ and different  $Ha$; they behave similarly to the WKB case above. Initially, for lower
$Ha$; they behave similarly to the WKB case above. Initially, for lower  $Ha$, there is no AMRI, since both areas are distant from the
$Ha$, there is no AMRI, since both areas are distant from the  $\textrm {Re}(k_z)$-axis (red dashed line); see figure 2(a). When
$\textrm {Re}(k_z)$-axis (red dashed line); see figure 2(a). When  $Ha$ is increased to a critical value of 81.6, the convective AMRI sets in as the upper area crosses the
$Ha$ is increased to a critical value of 81.6, the convective AMRI sets in as the upper area crosses the  $\textrm {Re}(k_z)$-axis (figure 2b). This crossing point has a cusp-like shape and thus appears to be the saddle point at the same time, implying that the convective and absolute AMRI are nearly equivalent at the onset. The growth rate of the absolute AMRI further increases with
$\textrm {Re}(k_z)$-axis (figure 2b). This crossing point has a cusp-like shape and thus appears to be the saddle point at the same time, implying that the convective and absolute AMRI are nearly equivalent at the onset. The growth rate of the absolute AMRI further increases with  $Ha$, as these areas merge. For example, at
$Ha$, as these areas merge. For example, at  $Ha=90$ in figure 2(c), the saddle point, corresponding to the absolute AMRI mode, is at
$Ha=90$ in figure 2(c), the saddle point, corresponding to the absolute AMRI mode, is at  $k_{z,s}=(3.24, -0.2)$ (red cross) with the growth rate
$k_{z,s}=(3.24, -0.2)$ (red cross) with the growth rate  $\textrm {Re}(\gamma (k_{z,s}))=1.9\times 10^{-3}$ and frequency
$\textrm {Re}(\gamma (k_{z,s}))=1.9\times 10^{-3}$ and frequency  $\textrm {Im}(\gamma (k_{z,s}))=-0.25$. When
$\textrm {Im}(\gamma (k_{z,s}))=-0.25$. When  $Ha$ is further increased, first the absolute AMRI (figure 2d) and then the convective AMRI (figure 2e) vanish.
$Ha$ is further increased, first the absolute AMRI (figure 2d) and then the convective AMRI (figure 2e) vanish.

Figure 2. Same as figure 1, but for the 1D stability analysis at the same  $Re=1480$ and
$Re=1480$ and  $m=1$. Now the saddle point (red cross) in (c), representing the absolute AMRI, is at
$m=1$. Now the saddle point (red cross) in (c), representing the absolute AMRI, is at  $k_{z,s}=(3.24, -0.2)$, with the growth rate
$k_{z,s}=(3.24, -0.2)$, with the growth rate  $\textrm {Re}(\gamma (k_{z,s}))=1.9\times 10^{-3}$.
$\textrm {Re}(\gamma (k_{z,s}))=1.9\times 10^{-3}$.
In figure 2(f), we also plot the marginal stability curves for the convective and absolute AMRI, with the latter being located inside the former, as in the WKB case, but in the 1D analysis, both are excited at almost identical critical  $Ha$ and
$Ha$ and  $Re$. Furthermore, comparing figures 1 and 2 shows that the distributions of the growth areas in the
$Re$. Furthermore, comparing figures 1 and 2 shows that the distributions of the growth areas in the  $k_z$-plane in the WKB and 1D analyses are qualitatively similar. However, the uncertainty in matching the constant
$k_z$-plane in the WKB and 1D analyses are qualitatively similar. However, the uncertainty in matching the constant  $Ro$ in the WKB case and the radially varying
$Ro$ in the WKB case and the radially varying  $Ro$ in the 1D case for a moderate gap width
$Ro$ in the 1D case for a moderate gap width  $(r_0-r_i)/r_i \sim 1$ (Stefani & Kirillov Reference Stefani and Kirillov2015), as well as some ambiguity in choosing the effective
$(r_0-r_i)/r_i \sim 1$ (Stefani & Kirillov Reference Stefani and Kirillov2015), as well as some ambiguity in choosing the effective  $k_r$ in the WKB analysis, makes quantitative differences between the two results unavoidable.
$k_r$ in the WKB analysis, makes quantitative differences between the two results unavoidable.
Figures 3(a,b) show areas with  $\textrm {Re}(\gamma )\geqslant 0$ in the
$\textrm {Re}(\gamma )\geqslant 0$ in the  $k_z$-plane at
$k_z$-plane at  $Ha=110$ for which the absolute AMRI reaches maximum growth for a given
$Ha=110$ for which the absolute AMRI reaches maximum growth for a given  $Re=1480$. Since the TC flow with a purely azimuthal field is invariant to reversing the sign of
$Re=1480$. Since the TC flow with a purely azimuthal field is invariant to reversing the sign of  $z$, the saddle points
$z$, the saddle points  $k_{z,s}$ and hence the absolute AMRI at
$k_{z,s}$ and hence the absolute AMRI at  $m=\pm 1$ occur symmetrically with respect to the
$m=\pm 1$ occur symmetrically with respect to the  $\textrm {Re}(k_z)$-axis: their
$\textrm {Re}(k_z)$-axis: their  $\textrm {Re}(k_{z,s})=3.67$ and growth rate
$\textrm {Re}(k_{z,s})=3.67$ and growth rate  $\textrm {Re}(\gamma (k_{z,s}))=0.00356$ are the same, while
$\textrm {Re}(\gamma (k_{z,s}))=0.00356$ are the same, while  $\textrm {Im}(k_{z,s})=\mp 0.42$ and frequency
$\textrm {Im}(k_{z,s})=\mp 0.42$ and frequency  $\textrm {Im}(\gamma (k_{z,s}))=\mp 0.2375$ differ only in sign. This implies that although the absolute AMRI modes have zero group velocity, they have non-zero phase velocities along and opposite the
$\textrm {Im}(\gamma (k_{z,s}))=\mp 0.2375$ differ only in sign. This implies that although the absolute AMRI modes have zero group velocity, they have non-zero phase velocities along and opposite the  $z$-axis, respectively, for
$z$-axis, respectively, for  $m=-1$ and
$m=-1$ and  $m=1$. In figure 3(c), we also plot
$m=1$. In figure 3(c), we also plot  $\textrm {Re}(\gamma )$ for the convective (optimized over
$\textrm {Re}(\gamma )$ for the convective (optimized over  $\textrm {Re}(k_z)$) and absolute AMRI. It is seen that the convective AMRI has a larger growth rate and occurs for a wider range of
$\textrm {Re}(k_z)$) and absolute AMRI. It is seen that the convective AMRI has a larger growth rate and occurs for a wider range of  $Ha$ than the absolute AMRI. As noted above, however, the convective and absolute AMRI are nearly identical at the onset for these parameters.
$Ha$ than the absolute AMRI. As noted above, however, the convective and absolute AMRI are nearly identical at the onset for these parameters.

Figure 3. The growth areas with  $\textrm {Re}(\gamma )>0$ in the
$\textrm {Re}(\gamma )>0$ in the  $k_z$-plane at
$k_z$-plane at  $Ha=110$ and
$Ha=110$ and  $Re=1480$ in the 1D case, separately for (a) the
$Re=1480$ in the 1D case, separately for (a) the  $m=1$ mode and (b) the
$m=1$ mode and (b) the  $m=-1$ mode. Because of the mirror symmetry of the flow, these areas flip with respect to the
$m=-1$ mode. Because of the mirror symmetry of the flow, these areas flip with respect to the  ${\rm Re}(k_z)$-axis when
${\rm Re}(k_z)$-axis when  $m$ changes sign; as a result, the saddle points (red crosses) for the absolute AMRI are symmetric around this axis:
$m$ changes sign; as a result, the saddle points (red crosses) for the absolute AMRI are symmetric around this axis:  $k_{z,s}=(3.67, \mp 0.42)$ for
$k_{z,s}=(3.67, \mp 0.42)$ for  $m=\pm 1$. The corresponding growth rate is
$m=\pm 1$. The corresponding growth rate is  $\textrm {Re}(\gamma (k_{z,s}))=0.00356$, and the frequency is
$\textrm {Re}(\gamma (k_{z,s}))=0.00356$, and the frequency is  $\textrm {Im}(\gamma (k_{z,s}))=\mp 0.2375$ for
$\textrm {Im}(\gamma (k_{z,s}))=\mp 0.2375$ for  $m=\pm 1$. (c) The growth rates of the convective (black) and absolute (red) AMRI versus
$m=\pm 1$. (c) The growth rates of the convective (black) and absolute (red) AMRI versus  $Ha$ at the same
$Ha$ at the same  $Re$.
$Re$.
It is now interesting to look at the spatial structure of the absolute and convective AMRI modes. Figure 4 shows the normalized eigenfunctions for the axial velocity  $u_z$ in
$u_z$ in  $(r,z)$-slices belonging to the absolute and convective AMRI at
$(r,z)$-slices belonging to the absolute and convective AMRI at  $m=\pm 1$,
$m=\pm 1$,  $Ha=110$ and
$Ha=110$ and  $Re=1480$. It is evident that the eigenfunctions for these two types of AMRI are characteristically similar, except that due to the complex wavenumber
$Re=1480$. It is evident that the eigenfunctions for these two types of AMRI are characteristically similar, except that due to the complex wavenumber  $k_{z,s}$ of the absolute AMRI, its eigenfunctions increase (for
$k_{z,s}$ of the absolute AMRI, its eigenfunctions increase (for  $m=1$) and decrease (for
$m=1$) and decrease (for  $m=-1$) along the
$m=-1$) along the  $z$-axis. This property is important for the interpretation of the simulation results in § 5. By contrast, the wavenumber of the convective AMRI is real, and hence its eigenfunctions retain a periodic structure with spatially constant amplitude along the
$z$-axis. This property is important for the interpretation of the simulation results in § 5. By contrast, the wavenumber of the convective AMRI is real, and hence its eigenfunctions retain a periodic structure with spatially constant amplitude along the  $z$-axis.
$z$-axis.

Figure 4. Normalized axial velocity  $u_z$ eigenfunctions in
$u_z$ eigenfunctions in  $(r,z)$-slices at
$(r,z)$-slices at  $Ha=110$,
$Ha=110$,  $Re=1480$ pertaining to the absolute AMRI with (a)
$Re=1480$ pertaining to the absolute AMRI with (a)  $m=1$ and (b)
$m=1$ and (b)  $m=-1$ (represented by red crosses in figure 3) and to the convective AMRI with (c)
$m=-1$ (represented by red crosses in figure 3) and to the convective AMRI with (c)  $m=1$ and (d)
$m=1$ and (d)  $m=-1$.
$m=-1$.
5. Simulations
We also conducted a direct numerical simulation (DNS) of AMRI in the same magnetized TC flow set-up and parameters as described in § 2, except that the cylinders now have a finite height  $L=10r_i$ as in PROMISE. We solved the basic equations of non-ideal MHD (in the same non-dimensional form) using the open-source code library OpenFOAM© (https://www.openfoam.com/), complemented by a Poisson solver for the determination of the induced electric potential. The code used here has already been validated in our previous works (Weber et al. Reference Weber, Galindo, Stefani, Weier and Wondrak2013; Seilmayer et al. Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014). The initial conditions are the previous TC profile
$L=10r_i$ as in PROMISE. We solved the basic equations of non-ideal MHD (in the same non-dimensional form) using the open-source code library OpenFOAM© (https://www.openfoam.com/), complemented by a Poisson solver for the determination of the induced electric potential. The code used here has already been validated in our previous works (Weber et al. Reference Weber, Galindo, Stefani, Weier and Wondrak2013; Seilmayer et al. Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014). The initial conditions are the previous TC profile  $\varOmega (r)= C_1+C_2/r^{2}$ with the azimuthal magnetic field
$\varOmega (r)= C_1+C_2/r^{2}$ with the azimuthal magnetic field  $\boldsymbol {B}_0=B_0(r_i/r)\boldsymbol {e}_{\phi }$. For the velocity we set
$\boldsymbol {B}_0=B_0(r_i/r)\boldsymbol {e}_{\phi }$. For the velocity we set  $\boldsymbol {u}=r\varOmega (r)\boldsymbol {e}_{\phi }$ (i.e. zero perturbation velocity) at the top and bottom of the cylinders and no-slip condition at the cylinder walls, while conducting boundary conditions are applied for the magnetic field, as in the 1D analysis above. Since the TC flow has a finite height and non-periodic boundary conditions along the
$\boldsymbol {u}=r\varOmega (r)\boldsymbol {e}_{\phi }$ (i.e. zero perturbation velocity) at the top and bottom of the cylinders and no-slip condition at the cylinder walls, while conducting boundary conditions are applied for the magnetic field, as in the 1D analysis above. Since the TC flow has a finite height and non-periodic boundary conditions along the  $z$-axis, the AMRI developing in this case is in fact a global instability. For the same values of
$z$-axis, the AMRI developing in this case is in fact a global instability. For the same values of  $Ha=110$ and
$Ha=110$ and  $Re=1480$ as used in § 4.2, we analysed the odd-
$Re=1480$ as used in § 4.2, we analysed the odd- $m$ azimuthal modes of this global AMRI and compared the results with those of the 1D linear analysis. We note that although DNS solves full nonlinear equations, it is still in the linear regime, since the emerging global AMRI increases exponentially in time and has not yet reached nonlinear saturation (see below).
$m$ azimuthal modes of this global AMRI and compared the results with those of the 1D linear analysis. We note that although DNS solves full nonlinear equations, it is still in the linear regime, since the emerging global AMRI increases exponentially in time and has not yet reached nonlinear saturation (see below).
In figure 5(a), we show the temporal evolution of the  $z$-profile of the axial velocity
$z$-profile of the axial velocity  $u_{z,o}(z, t)$ at a radius
$u_{z,o}(z, t)$ at a radius  $r_0=1.75$ for odd azimuthal modes of the global AMRI obtained from the DNS. To remove all even-
$r_0=1.75$ for odd azimuthal modes of the global AMRI obtained from the DNS. To remove all even- $m$ modes from the flow, we take the difference of the full axial velocity
$m$ modes from the flow, we take the difference of the full axial velocity  $u_z(r,\phi ,z,t)$ at
$u_z(r,\phi ,z,t)$ at  $\phi =0$ and
$\phi =0$ and  $\phi ={\rm \pi}$ for
$\phi ={\rm \pi}$ for  $r_0=1.75$, i.e.
$r_0=1.75$, i.e.  $u_{z,o}(z,t)=u_z(r_0,0,z,t)-u_z(r_0,{\rm \pi} ,z,t)$. Since
$u_{z,o}(z,t)=u_z(r_0,0,z,t)-u_z(r_0,{\rm \pi} ,z,t)$. Since  $m=\pm 1$ are the most dominant non-axisymmetric modes in the flow, it is appropriate to compare this velocity profile with that of the absolute AMRI obtained from the 1D linear analysis. In figure 5(b), we show the normalized axial velocity profile
$m=\pm 1$ are the most dominant non-axisymmetric modes in the flow, it is appropriate to compare this velocity profile with that of the absolute AMRI obtained from the 1D linear analysis. In figure 5(b), we show the normalized axial velocity profile  $u_z(z,t)$ for the absolute AMRI constructed from the linear superposition of its eigenfunctions at
$u_z(z,t)$ for the absolute AMRI constructed from the linear superposition of its eigenfunctions at  $m=\pm 1$ (figure 4a,b), taken with equal weights. Figure 5 shows a remarkable similarity in the butterfly patterns of the axial velocity resulting from the DNS and 1D analysis. Evidently, it also demonstrates that the
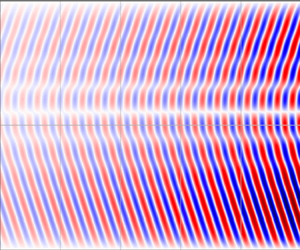
$m=\pm 1$ (figure 4a,b), taken with equal weights. Figure 5 shows a remarkable similarity in the butterfly patterns of the axial velocity resulting from the DNS and 1D analysis. Evidently, it also demonstrates that the  $m=\pm 1$ modes dominate the global AMRI in the simulations (which we also checked by directly calculating the amplitudes of different modes in the azimuthal Fourier transform of the global solution), with the flow structure similar to that in the 1D analysis. Next, we obtain the frequency, growth rate and axial wavenumbers of this global AMRI structure.
$m=\pm 1$ modes dominate the global AMRI in the simulations (which we also checked by directly calculating the amplitudes of different modes in the azimuthal Fourier transform of the global solution), with the flow structure similar to that in the 1D analysis. Next, we obtain the frequency, growth rate and axial wavenumbers of this global AMRI structure.

Figure 5. Spatio-temporal variation (butterfly diagram) of the axial velocity  $u_z$ in the
$u_z$ in the  $(t,z)$-slice at
$(t,z)$-slice at  $Ha=110$ and
$Ha=110$ and  $Re=1480$ (a) for odd azimuthal modes of the global AMRI in the DNS and (b) constructed from
$Re=1480$ (a) for odd azimuthal modes of the global AMRI in the DNS and (b) constructed from  $m=\pm 1$ eigenfunctions of the absolute AMRI in the 1D linear analysis, which are shown in figure 4(a,b).
$m=\pm 1$ eigenfunctions of the absolute AMRI in the 1D linear analysis, which are shown in figure 4(a,b).
In figure 6(a), we plot  $u_{z,o}$ at
$u_{z,o}$ at  $z_0=-3$ as a function of time and make a fit with the expressions of the harmonic form
$z_0=-3$ as a function of time and make a fit with the expressions of the harmonic form  $A \exp (\varGamma t)\cos (\omega (t-t_0))$, obtaining in this way for the growth rate
$A \exp (\varGamma t)\cos (\omega (t-t_0))$, obtaining in this way for the growth rate  $\varGamma$ and frequency
$\varGamma$ and frequency  $\omega$ the values
$\omega$ the values  $\varGamma = 0.00337$ and
$\varGamma = 0.00337$ and  $\omega =0.252$. We also performed a Hilbert transform (figure 6b) to obtain envelopes of the velocity evolution and instantaneous frequency, which yields growth rate
$\omega =0.252$. We also performed a Hilbert transform (figure 6b) to obtain envelopes of the velocity evolution and instantaneous frequency, which yields growth rate  $0.0034$ and frequency
$0.0034$ and frequency  $0.251$ for the global AMRI. Both of these results are in good agreement with the 1D linear stability analysis for the absolute AMRI, which yielded the growth rate
$0.251$ for the global AMRI. Both of these results are in good agreement with the 1D linear stability analysis for the absolute AMRI, which yielded the growth rate  $0.00356$ and frequency
$0.00356$ and frequency  $0.2375$ (figure 3a,b).
$0.2375$ (figure 3a,b).

Figure 6. (a) Time evolution of  $u_{z,o}(z_0,t)$ for the global AMRI at
$u_{z,o}(z_0,t)$ for the global AMRI at  $z_0=-3$ with (b) the corresponding Hilbert transform. (c) Fits to the axial structure of this dominant global mode (lilac) obtained using POD at
$z_0=-3$ with (b) the corresponding Hilbert transform. (c) Fits to the axial structure of this dominant global mode (lilac) obtained using POD at  $r_0=1.75$ with two functions
$r_0=1.75$ with two functions  $f(z)$ (green) and
$f(z)$ (green) and  $g(z)$ (blue), which correspond to the absolute AMRI modes with
$g(z)$ (blue), which correspond to the absolute AMRI modes with  $m=-1$ and
$m=-1$ and  $m=1$, respectively (see text).
$m=1$, respectively (see text).
We also performed proper orthogonal decomposition (POD) of  $u_{z,o}(z,t)$ to compute the real and imaginary components of the axial wavenumbers
$u_{z,o}(z,t)$ to compute the real and imaginary components of the axial wavenumbers  $k_z$ of the global AMRI mode structure in figure 5(a), using the model reduction library modred (Belson, Tu & Rowley Reference Belson, Tu and Rowley2014). The amplitude obtained for this dominant global mode as a function of
$k_z$ of the global AMRI mode structure in figure 5(a), using the model reduction library modred (Belson, Tu & Rowley Reference Belson, Tu and Rowley2014). The amplitude obtained for this dominant global mode as a function of  $z$ is plotted in figure 6(c). As the global AMRI flow actually consists of the two
$z$ is plotted in figure 6(c). As the global AMRI flow actually consists of the two  $m=\pm 1$ modes, each prominent on one side of the symmetry
$m=\pm 1$ modes, each prominent on one side of the symmetry  $(z=0)$-plane, it is reasonable to make two separate fits using the expressions
$(z=0)$-plane, it is reasonable to make two separate fits using the expressions  $f(z)=A_1\exp (-\textrm {Im}(k_{z,1}) (z+5))\cos (\textrm {Re}(k_{z,1})(z-z_1))$ and
$f(z)=A_1\exp (-\textrm {Im}(k_{z,1}) (z+5))\cos (\textrm {Re}(k_{z,1})(z-z_1))$ and  $g(z)=A_2\exp (-\textrm {Im}(k_{z,2}) (z-5))\cos (\textrm {Re}(k_{z,2})(z-z_2))$ (also shown in figure 6(c)), each corresponding to one of the two absolute AMRI modes with
$g(z)=A_2\exp (-\textrm {Im}(k_{z,2}) (z-5))\cos (\textrm {Re}(k_{z,2})(z-z_2))$ (also shown in figure 6(c)), each corresponding to one of the two absolute AMRI modes with  $m=\pm 1$. Upon such a fitting, we obtain the values
$m=\pm 1$. Upon such a fitting, we obtain the values  $k_{z,1}=(3.26, 0.29)$ and
$k_{z,1}=(3.26, 0.29)$ and  $k_{z,2}=(3.49, -0.392)$, which agree reasonably well with the results of our 1D analysis,
$k_{z,2}=(3.49, -0.392)$, which agree reasonably well with the results of our 1D analysis,  $k_{z,s}=(3.67, \mp 0.42)$, from figure 3(a,b). However, it should be noted that the DNS was done for a finite-length TC flow, while in the linear stability analysis, the cylinder height was assumed to be infinite. Hence, the minor quantitative difference between the DNS and the 1D linear analysis results may be attributable to the assumption of infinite length of the cylinders in the latter approach.
$k_{z,s}=(3.67, \mp 0.42)$, from figure 3(a,b). However, it should be noted that the DNS was done for a finite-length TC flow, while in the linear stability analysis, the cylinder height was assumed to be infinite. Hence, the minor quantitative difference between the DNS and the 1D linear analysis results may be attributable to the assumption of infinite length of the cylinders in the latter approach.
6. Conclusion
By performing WKB and 1D linear stability analyses, we have shown that the absolute variant of AMRI corresponds to a saddle point in the complex axial wavenumber plane which, in physical space, appears as the characteristic solution exponentially increasing in the (negative or positive) axial direction. This is quite different from, and has more significance from the experimental point of view than, the often considered convective AMRI with a real axial wavenumber. The corresponding global instability for the finite-height TC flow (with non-periodic axial boundary conditions) was obtained by DNS, which was demonstrated to represent the superposition of two absolute AMRI modes with  $m=\pm 1$ from the 1D stability analysis of infinitely long cylinders. In other words, the butterfly diagram exhibited by the global AMRI mode can be understood as being composed of the two dominant, absolute AMRI wave modes with zero group velocities but with corresponding phase velocities of propagation directed upwards and downwards. These results further refine the interpretation of the butterfly-type structure observed in the PROMISE experiment (Seilmayer et al. Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014; Seilmayer, Ogbonna & Stefani Reference Seilmayer, Ogbonna and Stefani2020), and will be essential for the design of the liquid sodium MRI experiments in the new DRESDYN project (Stefani et al. Reference Stefani, Gailitis, Gerbeth, Giesecke, Gundrum, Rüdiger, Seilmayer and Vogt2019). Finally, we note that understanding the dynamics of AMRI is also important for establishing its relevance for the ‘dead zones’ of accretion (protoplanetary) discs (Gammie Reference Gammie1996; Lesur, Kunz & Fromang Reference Lesur, Kunz and Fromang2014), which are cold, dense, very weakly ionized and therefore magnetically less active inner regions of discs, where high resistivity, resulting in
$m=\pm 1$ from the 1D stability analysis of infinitely long cylinders. In other words, the butterfly diagram exhibited by the global AMRI mode can be understood as being composed of the two dominant, absolute AMRI wave modes with zero group velocities but with corresponding phase velocities of propagation directed upwards and downwards. These results further refine the interpretation of the butterfly-type structure observed in the PROMISE experiment (Seilmayer et al. Reference Seilmayer, Galindo, Gerbeth, Gundrum, Stefani, Gellert, Rüdiger, Schultz and Hollerbach2014; Seilmayer, Ogbonna & Stefani Reference Seilmayer, Ogbonna and Stefani2020), and will be essential for the design of the liquid sodium MRI experiments in the new DRESDYN project (Stefani et al. Reference Stefani, Gailitis, Gerbeth, Giesecke, Gundrum, Rüdiger, Seilmayer and Vogt2019). Finally, we note that understanding the dynamics of AMRI is also important for establishing its relevance for the ‘dead zones’ of accretion (protoplanetary) discs (Gammie Reference Gammie1996; Lesur, Kunz & Fromang Reference Lesur, Kunz and Fromang2014), which are cold, dense, very weakly ionized and therefore magnetically less active inner regions of discs, where high resistivity, resulting in  $Pm \ll 1$, leads to the suppression of standard MRI.
$Pm \ll 1$, leads to the suppression of standard MRI.
Funding
This project received funding from the European Union's Horizon 2020 research and innovation programme under the ERC Advanced Grant Agreement No. 787544 and from the Shota Rustaveli National Science Foundation of Georgia (SRNSFG, Grant No. FR17-107). We thank R. Hollerbach for kindly providing the linear 1D code used here and J. Ogbonna for carefully reading the manuscript. We also thank the anonymous reviewers for constructive reports that improved the presentation of this work.
Declaration of interests
The authors report no conflict of interest.






















































 Open access
Open access