



I. Introduction: the rapid growth of drone technology
Unmanned aerial vehicles, commonly referred to as “drones”,Footnote 1 offer enormous potential for developing innovative civil applications in a wide variety of sectors.Footnote 2 According to data gathered by the Commission of the European Union (EU), within twenty years the European drone sector alone is expected to employ directly more than 100,000 people and to have an economic impact exceeding €10 billion per year.Footnote 3
The lack of a coherent regulatory regime was identified early on as a potential hindrance for the development of this new technology. The EU Commission, in its 2014 Communication on how to make Europe a global leader in the drone industry, said that investments would be delayed “until sufficient legal certainty on the legal framework is offered”.Footnote 4
One of the key proposals outlined in the Communication was that the EU should develop common rules for all drone operations. A year later, the EU Commission adopted a new aviation strategy for Europe.Footnote 5 This strategy included a plan on how to address future challenges faced by the European aviation sector and how to improve the competitiveness of the aerospace industry. The plan included a proposal for a revision of the so-called “Basic Regulation”, which brought all aircraft, including drones, under EU competence and established the European Aviation Safety Agency (EASA).Footnote 6
The Basic Regulation defines unmanned aircraft as “any aircraft operating or designed to operate autonomously or to be piloted remotely without a pilot on board”.Footnote 7 While it defines the concept of unmanned aircraft and provides rules for their design, production, maintenance and operation, it does not provide legal certainty concerning a multitude of legal issues, such as civil liability, privacy or administrative and criminal law – issues that are largely regulated in domestic law.Footnote 8
This article will provide an overview of some of the uncertainties faced through the operation of autonomous drones in general and according to a pan-European research project on autonomous drones in particular (the Risk-Aware Autonomous Port Inspection Drones (RAPID) project).Footnote 9 The authors use this project to illustrate the legal uncertainties facing developers of autonomous drone technology, focusing in particular on civil liability. By combining insights from legal scholarship and software electronic and computer engineering, the article provides a real-world perspective of how legal uncertainty may affect technological innovation and development. The legal analysis focuses mainly on German and English private law. These represent two of the six jurisdictions of the partners (also including Belgium, France, Ireland and Norway) involved in the ongoing project, as well as two major legal traditions, viz. civil and common law. The authors argue that despite the establishment of common rules for the registration, certification and conduct for drone operators within the EU, the lack of legal certainty on a number of other issues still stifles drone development, undermining the ambition of the EU to become the global leader in this rapidly evolving industry. In order to make this argument, the article uses a fictious but not unlikely scenario of an autonomous drone – that is to say, a drone operating without a pilot and directed on the basis of machine learning – falling from the sky and injuring people on the ground. This scenario is analysed from the perspectives of German and English private law.
The UK left the EU on 31 December 2020 and thus is no longer subject to EU law nor part of EU institutions, such as the EASA. The UK will still be used as an example, however, since many of the problems faced by the EU are still relevant to the UK even after it has regained legislative authority over civil aviation upon leaving the EU. Much of the existing EU legislation still applies in domestic UK law as “retained EU law”. Thus, while the relevant EU regulations no longer formally apply to the UK, their provisions have been made part of UK law and will stay part of UK law for the foreseeable future.Footnote 10
Before detailing the working scenario, which forms the basis of this article, it is useful to provide some information about the RAPID project. Section II provides information about the project, as well as more generally about Artificial Intelligence (AI) and machine learning. Section III outlines some of the broader legal uncertainties in the operation of autonomous drones, whereas Section IV focuses on the working scenario, which is analysed from the English and German perspectives in Sections IV.1 and IV.2, respectively. The article then concludes in Section V that the level of uncertainty and fragmentation in the law on drones stifle the further rolling out of the technology in new situations, such as those envisaged by the RAPID project and other autonomous uses of this new technology.
II. The Risk-Aware Autonomous Port Inspection Drones project
The RAPID project seeks to extend the use of commercial drones’ capabilities to provide an early warning system that will detect critical deterioration in transport system infrastructure while minimising system disruption and delays to critical supply chains.Footnote 11 It already adopts approved and commercially available drones in four use case scenarios: bridge inspection, ship emission monitoring, ship hull inspection and emergency responses. Importantly, the difficulty of clearly identifying and applying the relevant rules in these scenarios is likely also to be mirrored in other situations explored by other operators, meaning that the lessons learnt in the context of the RAPID project are relevant more generally.
In each of the four scenarios a single drone or swarms of autonomous drones will take off and navigate through a potentially cluttered urban environment to arrive at and return from a designated target, such as a bridge or ship. While the technology to accomplish this is within reach of the project, its deployment is impeded by legal challenges, as highlighted in this article.
The most important challenge for operating drones in Europe is legal uncertainty. The development and use of autonomous drones raises a bewildering number of legal issues, which are governed by an equally complex set of rules derived from domestic, regional and international law. Most international conventions that apply to civil aviation are, for example, limited in their ability to effectively regulate drones. One such example is the 1944 Convention on International Civil Aviation, which “provides an overarching and underpinning legal framework for international civil aviation”.Footnote 12 While the terms of the 1944 Convention are broad enough to encompass drones,Footnote 13 the Convention only applies to international aviation.Footnote 14 Purely domestic flights, by drones or other aircraft, are therefore not regulated by this Convention.Footnote 15 Additionally, the 1944 Convention is generally read to prohibit drones, in particular autonomous drones, from flying over another state’s territory without its permission.Footnote 16
Several international bodies are formulating proposals for new rules on drones. Among them is the International Civil Aviation Organization (ICAO), a worldwide regulator, as well as national and regional actors, such as EASA and the US Federal Aviation Administration (FAA).Footnote 17 In addition to these, there are numerous other actors, such as the European Organisation for Civil Aviation Equipment (EUROCAE), the Joint Authorities for Rulemaking on Unmanned Systems (JARUS), the European Defence Agency and the European Space Agency, as well as the drone manufacturing industry and operators, which have both adopted industry standards and sought to affect the official law-making process. Despite the numerous actors involved, detailed global or even regional rules concerning autonomous drones are still a long way off. For the time being, national laws must fill gaps that international and regional rules have not yet filled. This article explores some of the current impediments, focusing on the inspection of bridges, but identifying issues common to many proposed use cases for drones.
Before analysing this scenario, it is useful to provide some clarity on AI and machine learning, which seem somewhat misunderstood by the public.Footnote 18 Thus, to better understand some of the legal uncertainties that arise with the use of autonomous drones, the next section describes some key features of AI and machine learning.
1. Artificial intelligence, machine learning and computer vision for autonomous drone systems
There are myriad technologies that may be classified under the broad spectrum of the term “AI”. Generally defined, these are systems that behave as though they are intelligentFootnote 19 (ie they have the ability to acquire and apply knowledge and skillsFootnote 20 ). Autonomous drone systems must exhibit certain behaviours that can be broadly classified as “intelligent” in order to be effective. For instance, an autonomous system capable of operating in the abovementioned scenarios must be able to take decisions without the (apparent) intervention of another independent actor. A drone following a pre-planned path to a bridge might encounter an unexpected obstacle, such as an oncoming ship, in its path and “decide” to increase its altitude to avoid a collision. While this behaviour appears autonomous and by extension intelligent, these types of adaptation rules can be programmed into the set of available responses of a system when faced with a class of external stimuli, like an oncoming ship. The system also must have self-adaptive behaviour (ie the capacity to modify its own behaviour dynamically and “learn” from its environment).Footnote 21 A drone flying through a cluttered urban environment might lose satellite navigation and change its navigation to rely on its internal sensors to estimate its real-world position until it recovers satellite signal. In that example, the navigation behaviour has changed after the system was able to detect a variation in the environment (in this case, loss of satellite navigation signal).
The key issue to be drawn from these examples is that while the behaviours appear “intelligent” through the acquisition and application of knowledge, they are in fact the result of the design, programming and deployment of the cyber-physical system. The challenge lies in the fact that when autonomy and self-adaptation capabilities are combined with an increasingly challenging environment, the number of possible emerging behaviours that could arise is so great that it is not feasible for these behaviours to be managed by current systems engineering practices.Footnote 22 That is to say, the reactions of the drones become unpredictable by the human operator.
A key underlying technology that enables autonomy and self-adaptation is machine learning. This is a subfield of AI that deals with developing algorithms that improve autonomous systems capabilities automatically.Footnote 23
2. How autonomous drones learn
An overall imperative for the widespread adoption of autonomous drones is safety. This means that autonomous drones must be able to detect and avoid (D&A) any potential obstacle in their flight path, and this must happen without the intervention of any operator. Current state-of-the-art D&A capabilities support operators in their drone operations by facilitating the identification of hazards that could result in a collision. D&A capabilities rely on computer vision algorithms to “sense” the environment. To give a better understanding of how autonomous drones learn and operate, we will now describe how these algorithms are designed and deployed.
Computer vision algorithms rely on a specific type of algorithm known as artificial neural networks (ANNs) or, most recently, deep learning neural networks (DLNNs). From a design perspective, these two types of networks have the same elements (see Figure 1). First is an “input layer” where the “sensed” image is sent to the ANN/DLNN. This “sensed” image is, in principle, annotated,Footnote 24 which means that another agent – typically a human – has provided a “ground truth” that describes the image. For example, an image of a bird is described as a bird, and this annotation functions as a connection between the input and output layers. Each connection is weighted, and these weights are modified during the training process. Second, there must be an “output layer” that provides the result of the classification process.
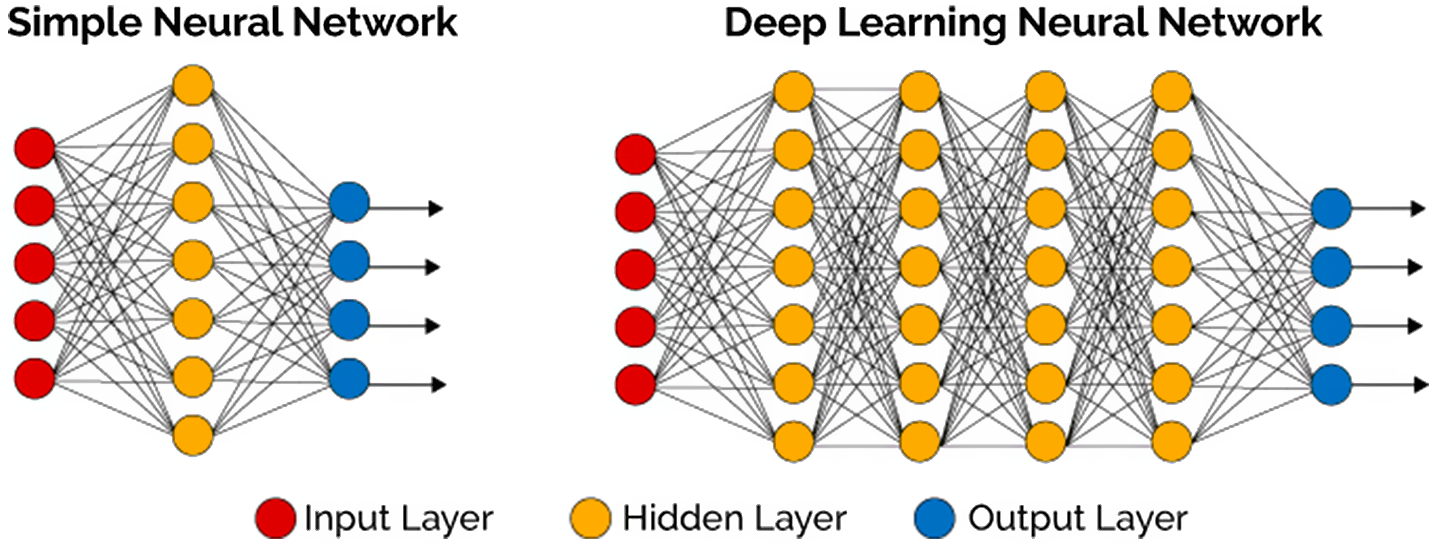
Figure 1 A simple artificial neural network and a deep learning neural network.
DLNNs depend on modern computing resources in order to have multiple hidden layers. This has enabled the recent expansion of the application domains and capabilities of computer vision and machine learning. There is an assumption that the number of hidden layers improves the classification capacity of the network.Footnote 25
Training is the process by which the ANN/DLNN is stimulated with a dataset (a huge set of annotated input images) and, for each item in the dataset, the output is compared against the annotated ground truth. The weighting of the connections is adjusted at the end of each iteration – through a pre-set error-based mechanism – and the process is repeated until the capacity to recognise objects correctly in an image is within the acceptable range of accuracy. Therefore, the expected classification behaviour “emerges” through several training iterations. The key to a successful deployment of an ANN/DLNN in the field is that the network is able to classify properly not only known inputs (samples it has seen in the training dataset) but also previously unseen inputs that are present in the deployment environment, such as a bird flying near the drone. This capability is known as under- or overfitting. A neural network model is underfitting if it fails to perform to acceptable accuracy in the training dataset. However, a neural net is overfitting if it performs to acceptable accuracy in the training dataset but fails to maintain this capability when faced with previously unseen input.Footnote 26
Currently, the possible variations of the ANN/DLNN architectures are known from the literature. The key element for achieving correct image recognition within acceptable accuracy relies on having a rich dataset. The capacity to acquire huge volumes of data is a constraint on the capacity to train an ANN/DLNN and is also the main source of bias in the neural network’s capabilities: the sheer variation in the deployment environment is difficult to address during the training process.
III. Legal uncertainties
Although many drone operators use drones that can be bought off the shelf, this does not mean that there are no rules with which their operators must comply. Just as anyone using a bicycle has to comply with traffic rules and is consequently responsible for any damage caused to third parties, users of drones must comply with applicable rules, such as the EU’s Basic Regulation (or retained legislation in the UK) and domestic criminal and tort law in the country where the drone is being operated. As already noted, the use of drones, and especially autonomous drones, raises a bewildering number of legal issues that are regulated in an equally bewildering set of rules derived from national, regional and international law. For the operation of drones, legal uncertainty is not created by the absence of rules; rather, it is created by the lack of clarity surrounding the applicability of the existing rules to this new technology, as well as by divergence amongst the different domestic legal regimes.
Another factor that raises issues is the capability of drones to take seemingly autonomous decisions, and the treatment of this capability by the law. Law is per definition anthropocentric. Humans are the primary subject and object of norms that are created, interpreted and enforced by other humans. As machines become ever more intelligent and autonomous, lawmakers and courts will face increasingly complex dilemmas when regulating the autonomous conduct of these machines.Footnote 27 In 2019, a report by the Expert Group on Liability and New Technologies, established by the EU Commission, noted the following: “The more complex these ecosystems become with emerging digital technologies, the more increasingly difficult it becomes to apply liability frameworks.”Footnote 28
The complex legal issues raised by AI are further exacerbated by that fact that there is no universal definition of AI or autonomy. In fact, although the Basic Regulation seeks to regulate any aircraft operating or designed to operate “autonomously”, it does not define the term.
It is moreover contentious whether AI may ever truly replicate human levels of intelligence. If AI systems ever acquire this ability, this would raise questions concerning their legal status and whether they could have legal personality (ie being recognised in law as independent actors with their own rights and responsibilities). However, there is nothing new about non-human actors having rights and obligations. As noted by Lord Sumption: “The distinct legal personality of companies has been a fundamental feature of English commercial law for a century and a half.”Footnote 29 Corporations even have limited human rights.Footnote 30 As for now, the issue of legal personality for AI systems remains controversial, but the aforementioned Expert Group noted that there was “currently no need to give a legal personality to emerging digital technologies”,Footnote 31 as “[h]arm caused by even fully autonomous technologies is generally reducible to risks attributable to natural persons or existing categories of legal persons, and where this is not the case, new laws directed at individuals are a better response than creating a new category of legal person”.Footnote 32
Despite not having legal personality, the use of autonomous systems still presents certain legal problems, and the more autonomous in its decisions and actions a system is, the more likely it is that it will become more difficult to apply anthropocentric law to a situation where damage is caused by this autonomous system.Footnote 33
EU rules have created a certain level of harmonisation concerning the operation of drones in the airspace of EU Member States. Thus, Commission Implementing Regulation 2019/947 (on the rules and procedures for the operation of unmanned aircraft) and Commission Delegated Regulation 2019/945 (on unmanned aircraft systems and on third-country operators of unmanned aircraft systems) provide harmonised provisions for drone operations. Commission Implementing Regulation 2019/947 divides the operation of drones in the EU into three categories: “open”, “specific” and “certified”, depending inter alia on the risk level involved in operating the drone in question.Footnote 34 Autonomous drones as used for the RAPID project fall under the “specific category”, as these drones are operated without a pilot.Footnote 35 The operation of drones in the specific category requires the operator of a drone to obtain a special authorisation prior to operation.Footnote 36 It is the EU Member States themselves (or in the case of the UK the Civil Aviation Authority (CAA)) that are responsible for enforcing the regulation and for issuing these authorisations for operations in the so-called “specific” category.
Regulation 2019/947 further requires that:
… [drone] operators and remote pilots should ensure that they are adequately informed about applicable Union and national rules relating to the intended operations, in particular with regard to safety, privacy, data protection, liability, insurance, security and environmental protection.Footnote 37
Despite the obligation this creates for operators and remote pilots to stay informed about the relevant legal regimes, the Regulation provides no further guidance on which and how extant rules apply to drones, in particular when it comes to civil liability arising from accidents caused by autonomous drones. As noted by Masutti:
What is missing is a liability regime, insurance and privacy protection [concerning drones]. The absence of a clear legal framework has already pushed European institutions and international organisations to address several guidelines in order to proceed in setting up a new framework regulation on this topic. The legal instruments for reaching this goal unfortunately remain unclear.Footnote 38
These are but some of the uncertainties raised by this new technology. Some of the existing uncertainties have already been addressed in the literature, such as the application of extant aviation rules to drones.Footnote 39 Other issues have received noticeably less attention, such as the issue of civil liability, the associated connection to privacy and data protectionFootnote 40 and issues of administrative and criminal law. These are issues that are predominately, though not exclusively, dealt with in domestic law. The following section focuses on a working scenario of an autonomous drone falling from the sky and the legal consequences in the UK (focusing only on English and Welsh private law) and Germany. These two jurisdictions are chosen not only because they are part of the RAPID project, but also because each is an exemplar of one of the two major legal traditions: common law and civil law.
IV. Working scenario: an autonomous drone falling from the sky
One way of illustrating the difficulties faced by operators of drones is to examine who would be liable (responsible) for damages caused by a drone, as well as the conditions for and the extent of this liability (responsibility). This article will examine the apportionment of civil liability in a situation where an autonomous drone falls from the sky and injures a member of the public. In our working scenario, an operator is using an autonomous drone that is flying in close proximity to a bridge. The operator is fully qualified to carry out the flight, and the drone is fully compliant with the domestic and international legal rules in either the UK or Germany, with permission having been sought and granted for autonomous flight. The drone is, moreover, equipped with state-of-the-art D&A technology that enables it to fly autonomously while detecting and avoiding known static hazards. In spite of this capability, the drone collides with the superstructure of the bridge and falls from the air. It then lands on a passer-by, seriously injuring that person.
Where a drone harms a passer-by, the law may provide remedies to the injured person against the person responsible for the harm. The rules that provide these remedies are generally categorised as “tort law”.Footnote 41 Torts are civil wrongs; that is to say, a tort is a breach of a legal duty that allows the affected individual to receive some form of redress.Footnote 42 The law of tort protects a wide range of interests against wrongdoing by the person committing the tort (a tortfeasor). In particular, it protects bodily integrity.Footnote 43
Since bodily integrity is considered paramount in tort law, injured people may sue and receive compensation from the tortfeasors.Footnote 44 Generally, in order for a claim in tort to be successful, fault on part of the tortfeasor is required.Footnote 45 This fault consists either in the fact that the tortfeasor meant (intended) to cause the harm or in the fact that the tortfeasor did not intend for the harm to happen but disregarded a duty of care that caused the harm (tort of negligence).Footnote 46 In this regard, it is irrelevant that the tortfeasor generally complied with relevant domestic and international rules and was fully qualified to carry out the flight. Rather, the tortfeasor will be liable if the victim can demonstrate that the tortfeasor was at fault when they caused the harm.Footnote 47
In certain areas, these regimes of fault-based liability are supplemented by compensation regimes based on strict liability (ie liability for causing harm regardless of the fault of the tortfeasor).Footnote 48 Both the legal systems of England and Germany provide for strict liability as well as for fault-based liability for accidents caused by aircraft in general, and drones in particular, as is shown in the subsequent discussion.Footnote 49
The following analysis focuses in particular on civil liabilityFootnote 50 and liability under criminal law.Footnote 51
1. Analysis from a perspective of the law of England and Wales
a. Injury to a person
Under English law, liability in this scenario is predominantly based on the law of torts. Much of the relevant tort law is derived from the common law and so a patchwork of case law must be examined. However, in this present scenario, statutory rules also apply, such as the Civil Aviation Act 1982, which imposes strict liability on aircraft owners for harm caused by their aircraft, and the Law Reform (Contributory Negligence) Act 1945, which balances responsibility where the injured party may have contributed to their injury.
The law concerning autonomous drones in England is not well developed. In some cases, the owner (or sometimes the operator) of a drone would need to show that the way in which the drone was being operated was not negligent, as negligence would give rise to their liability. In cases involving third-party liability, however, liability is strict, by virtue of the Civil Aviation Act 1982. Under the current legal framework, the operator would also need to show that they had permission from the CAA to conduct the autonomous flight. Such permissions have begun to be granted, in limited circumstances.Footnote 52
Negligence under English law is, of itself, a tort. However, “unlike other torts, negligence is not limited to the protection of a particular kind of interest”.Footnote 53 Indeed, it is “based on the conduct of the defendant and may be imposed in respect of a wide range of interests damaged by that conduct”, and it centres on a duty of care.Footnote 54
In order to show that a duty of care exists, it may be possible to refer to existing case law on a particular point (eg drivers’ duty of care to other road users).Footnote 55 In other words, a duty of care may arise from common law. In novel situations, however, proving a duty of care is more difficult. Generally, in novel situations, the courts will seek to develop the law incrementally by drawing on existing case law and developing it by analogy.Footnote 56 Given that the drone in our scenario is operating autonomously, it is not clear what the duty of care currently entails, and it is therefore difficult to predict how the courts may develop existing law by analogy to cover such an example.
A duty of care cannot only be derived from case law, as it can also arise from statute. In respect of injury caused by drones, a statutory duty of care that imposes strict liability on aircraft owners for injury caused by the aircraft arises under Section 76(2) of the Civil Aviation Act 1982:Footnote 57
… where material loss or damage is caused to any person or property on land or water by, or by a person in, or an article, animal or person falling from, an aircraft while in flight, taking off or landing, then unless the loss or damage was caused or contributed to by the negligence of the person by whom it was suffered, damages in respect of the loss or damage shall be recoverable without proof of negligence or intention or other cause of action, as if the loss or damage had been caused by the wilful act, neglect, or default of the owner of the aircraft.Footnote 58
This provision imposes strict liability on the owner of an aircraft in the event that the aircraft causes loss or damage to a person.Footnote 59 Where strict liability exists, issues of negligence (or even intent)Footnote 60 become irrelevant as the liability exists irrespective of the actions of the tortfeasor. In the context of autonomous drones, it would therefore be irrelevant whether mistakes had been made in training the drone or if there had been issues with the dataset that had informed its learning. In other words, the tortfeasor will be liable simply because the harm occurred, even if they were acting carefully and reasonably to mitigate the risk. Whilst there is no relevant case law, there is little doubt that a drone is an “aircraft” for the purposes of the Civil Aviation Act.Footnote 61 For the purposes of our working scenario, it appears that it does not matter whether a drone is being directly piloted by a human or is operating autonomously for the strict liability regime to apply. This is because Section 76 clearly applies to an aircraft in flight, regardless of how it is being flown.
Where a drone causes injury to a person on the ground, as in our scenario, the owner is liable for the injury caused,Footnote 62 independent of potential human errors in training the drone or the dataset used to develop its autonomy. The only exception is where the owner has hired the drone out for a period of more than fourteen days, in which case the individual hiring the drone would be liable. This means that where a company hires rather than owns its own drones, it will take on the responsibility for any accidents they cause as long as the hiring period is long enough.Footnote 63 However, this is only the case with a “dry lease”, where the leasing firm does not provide any crew to fly, navigate or operate the drone. At present, the majority of leases are “wet leases”, where the leasing firm provides not only the drone but also the pilot, with or without other staff.Footnote 64 In these leases, the owner remains liable. Nevertheless, as autonomous operations develop and complexity increases, it is likely that this distinction will blur and the existing scheme will not operate in such a clear-cut manner.Footnote 65 In any event, at present, in situations where an employee is operating a drone on behalf of a company, it appears that the company would be liable for any injury caused irrespective of the manner in which the drone was being controlled.
In such cases, the only way for the owner to escape complete liability is by proving contributory negligence on the part of the injured party. Contributory negligence is a concept that allows courts to balance responsibility where the injured party contributed in some way to their injury. This is governed by the Law Reform (Contributory Negligence) Act 1945, Section 1(1). Given the nature of drone operations, however, it is unlikely that any injured party could have contributed to their injury, creating “an almost absolute liability system”.Footnote 66 Although the courts have, in the past, allowed the injured party’s contribution to be set at 100%, this no longer appears to be the case. The courts have altered their approach, recognising that where the victim is 100% responsible for their injury it is difficult to argue that the tortfeasor could have been responsible.Footnote 67 Thus, it is unlikely that an aircraft owner could escape liability totally by reference to the fault of the injured party, and therefore they will remain at least partially liable.
As this outline of the law has shown, where a person is injured on the ground by a drone, operating either under pilot control or autonomously, the owner of the drone will be liable for any injury caused. Moreover, it seems unlikely that an owner will be able to escape liability fully by reliance on contributory negligence. It remains the case, however, that all commercial operators of drones will be required to have, as a minimum, third-party liability insurance, which ought to offer financial protection in cases such as this.Footnote 68 Commercial operators will thus be able to rely on their insurers in cases where injury occurs, and liability is imposed by virtue of Section 76 of the Civil Aviation Act.
From the perspective of the injured party, however, it may be possible to take legal action against people other than the aircraft owner. For example, it may be possible to bring a claim for damages against a manufacturer where a drone was defective using consumer protection legislation.Footnote 69 Similarly, it may be possible to bring a broader action in negligence against a third party who in some way contributed to the crash.Footnote 70 For example, it is conceivable that a drone crash could be caused by magnetic interference from train lines. In such a scenario, the normal rules of negligence would apply, and a claimant would need to show that they were owed a duty by the third party and that that duty had been breached through negligence.Footnote 71
From the perspective of those operating drones commercially, the existing scheme appears highly punitive and may lead to rising insurance premiums, both of which are likely to stifle the development and commercial application of drone technology. At present, however, insurers do not seem to be uncomfortable with the risk and have been willing to offer insurance to those seeking to operate drones commercially.Footnote 72 Whether this will change as drone operations – and therefore risks – increase remains to be seen.
The sense that this regime is particularly punitive is further heightened by the fact that in a situation such as our scenario, where the operator does not have the ability to override the D&A system, the operator is entirely reliant on the software manufacturer and drone manufacturer operating correctly.Footnote 73 This would mean that the manufacturers of D&A systems would likely benefit from the current approach, with less direct incentive for them to develop higher-quality systems, to the detriment of operators.Footnote 74 This raises wider – and as yet unanswered – questions about whether or not a system of liability that mirrors that of airline liability is suitable for drones in an era of autonomous operation.
b. Other legal issues
Flying drones can also raise other legal issues; for example, if the drones are flying over private property. In this scenario, the tort of trespass may become relevant. Trespass is defined as the unjustifiable interference with the possession of land.Footnote 75 Unlike the other forms of tort, trespass is actionable in the courts whether or not the claimant has suffered any damage. Thus, it would not need to be shown that any damage was attributable to the drone.
A classic example of trespass is walking on another person’s land without their permission. However, trespass can also be committed by entering another person’s airspace. A leading case concerned the erection of an advertising sign that extended a mere eight inches over the neighbour’s land. This was trespass.Footnote 76 Even the arm of a crane swinging over someone’s property can be a trespass.Footnote 77 But the law is uncertain in relation to drones. Thus, in another leading case it was held not to be trespass if an aircraft flies high enough above the level of the ordinary use of land, in this case more than thirty metres above the property.Footnote 78 The decision was influenced by the Civil Aviation Act, which specifically states that a trespass is not committed if an aircraft flies above property at a “reasonable height” having regard to the prevailing conditions.Footnote 79 The position for the law was summarised in 1978 by Griffiths J in Bernstein of Leigh v Skyviews & General Limited:
The problem … is to balance the rights of an owner to enjoy the use of his land against the rights of the general public to take advantage of all that science now offers in the use of air space. This balance is in my judgment best struck in our present society by restricting the rights of an owner in the air space above his land to such height as is necessary for the ordinary use and enjoyment of his land and the structures upon it, and declaring that above that height he has no greater rights in the air space than any other member of the public.Footnote 80
As noted by Horsey and Rackley, this raises uncertainty as to how far into the airspace above someone’s property trespass can occur and how the current law applies to drones.Footnote 81 What is certain is that if anything falls onto the land it is a trespass, even if the aircraft was flying at a reasonable height.Footnote 82
These issues make an already complex set of rules and liabilities even less certain, and they raise further complications for operators of drones (autonomous or otherwise).
If a tort has been committed, the owner of the property may sue for damages. Damages are not only aimed at compensating the claimant, but also at vindicating the loss of (or interference with) rights and deterring the tortfeasor and other potential wrongdoers.Footnote 83 Thus, in addition to being responsible for the personal injury in this case, there are questions about whether the operator of a drone might be responsible for committing the tort of trespass and be liable for damages to the landowner, even if the drone has flown through the landowner’s airspace without intention. This serves to highlight further the complexities of autonomous drone operation, solely in relation to the law of tort.
Whilst this scenario focuses on the issues that arise in respect of tort law, the operator of a drone that causes damage to a person or to property may well also be liable as a matter of criminal law. One example of the criminal law being brought to bear is that of Robert Knowles, who, in 2014, became the first person in the UK to successfully be prosecuted for the dangerous and illegal operation of a drone. He was convicted for having flown in restricted airspace, as well as allowing the device to fly too close to a vehicle bridge. Both offences breached the UK’s 2009 Air Navigation Order, and Mr Knowles was fined £800.Footnote 84 Examples such as this further illustrate the range of issues that need to be addressed and clarified in order to deploy this technology
2. Analysis from a German perspective
a. Injury to a person
Under German law, two regimes of civil liability in particular apply to the scenario of a drone falling from the sky: strict liability according to the Luftverkehrsgesetz (LuftVG; German Air Traffic Act), which provides for a special liability regime for aircraft (including drones), and fault-based liability according to Section 823 and following sections of the Bürgerliches Gesetzbuch (BGB; German Civil Code).
In order for the LuftVG to apply, the drone in question must qualify as an aircraft.Footnote 85 Traditionally, the term “aircraft” has included, for example, planes or model aircraft.Footnote 86 But in 2012, the LuftVG was amended in order to provide for a special provision for “unmanned aerial systems”Footnote 87 (“unbemannte Luftfahrtsysteme”), extending the LuftVG to drones.Footnote 88 According to the amended statute, drones that are used for commercial purposes are “unmanned aerial systems” and are deemed to be aircraft.Footnote 89 Drones that are used for sport and leisure would also qualify as aircraft under the LuftVG, as those drones qualify as “flight models”.Footnote 90
The drone in our scenario would, therefore, be deemed to be an aircraft according to the LuftVG, as the autonomous drone is an unmanned device to be used in the airspace (an unmanned aerial system), and it is operated for commercial purposes. As a result, the liability regime of the LuftVG applies.
Like the law in England, German law provides for strict liability for damages caused through operating an aircraft or a drone.Footnote 91 This means that, in this context, errors in operating or training the drone may be irrelevant. Strict liability according to the LuftVG even applies where the damage caused by the aircraft resulted from a force majeure event; for example, if the drone crashed because it was struck by lightning.Footnote 92 For this reason, strict liability under the LuftVG has been described as “the strictest form of strict liability in German law”.Footnote 93 Under German law, the person who is strictly liable is, as a rule, the “Halter” of the drone.Footnote 94 The term Halter encompasses everyone who uses the aircraft “for their own account” (“für eigene Rechnung”) and who has the ability to control how the aircraft is being used (including the power to dispose of the aircraft).Footnote 95 Using the aircraft for one’s own account means enjoying the benefit of using the aircraft for a substantial amount of time, while at the same time being responsible for the upkeep of the aircraft.Footnote 96 The Halter can be the owner of the aircraft, therefore, but the term is not limited only to the owner.Footnote 97 If, for example, the owner allows someone else to use the drone for their own account, such as by leasing or lending it, then this other person is the Halter and therefore liable for any damage.Footnote 98
Like in English law, liability may be reduced if the injured person was partly to blame for the accident.Footnote 99 It is conceivable, for example, that the area around the bridge that is to be inspected might be cordoned off and secured by several warning signs that expressly prohibit access to the cordoned-off area during ongoing drone-inspection activities.Footnote 100 If the victim disregarded the warning signs and was then hit by the falling drone whilst in the restricted area, then it is likely that the victim would not be able to recover the full amount in terms of damages.
In Germany, damages for bodily harm are inclusive of compensation for medical costs as well as compensation for financial loss suffered by the injured person; for example, because they are unable to work or because their needs have increased due to the accident.Footnote 101 Unlike in English law, liability for damages is capped.Footnote 102 The cap depends on the maximum take-off weight (MTOW) of the aircraft.Footnote 103 For example, if the MTOW of the aircraft is below 500 kg, as is the case for the RAPID project and for many commercial drones, liability is capped at 750,000 accounting units (“Rechnungseinheiten”).Footnote 104
Liability for bodily harm is further capped and may not exceed €600,000 or payments of €36,000 annually in the event that the injured person has to be compensated for reduced ability or complete inability to work.Footnote 105 Any damages would, however, be covered by a mandatory third-party liability insurance that all Halters are required to obtain.Footnote 106
The liability regime of the LuftVG is supplemented by a regime of fault-based liability under the BGB.Footnote 107 One of the main provisions for fault-based liability is Section 823(1) of the BGB. Unlike the strict liability regime under the LuftVG, fault-based liability under Section 823 of the BGB requires intent or negligence (ie fault or culpability).Footnote 108 Intent is established if the “harmful conduct is … accompanied by the intention of invading the protected legal interest”.Footnote 109 Negligence is established if the person causing the harm did not observe a reasonable duty of care.Footnote 110 In order to determine whether a certain behaviour was negligent, the way a “conscientious and considerate [person] would have behaved in the same situation” will be decisive.Footnote 111
Under these general norms, both the Halter and the operator of the drone are liable, as well as all other persons whose culpable behaviour contributed in some way to the damage caused by the aircraft (the drone).Footnote 112
In addition, the manufacturers of the drone or of separate parts of the drone could be liable under the general principles for damages caused by faulty products.Footnote 113 In the case of autonomous drones, the person who programmed the algorithm for the drone or the person who assembled the drone could be liable under the general rules (without caps on the liability).Footnote 114 Another example where fault-based liability could come into play is when the owner or operator of the drone does not charge the drone correctly, and so the drone falls on the passer-by because the drone runs out of power mid-flight.Footnote 115
There are no caps on the liability for fault-based liability.Footnote 116 However, in a similar manner to the law in the England, liability may be reduced if the injured person contributed to the damages.Footnote 117
b. Further issues
As with the law in England, this scenario is only a snapshot of the legal issues raised by the use of autonomous drones in this manner. Thus, the capability of drones to transmit pictures may lead to criminal liability under German law in certain circumstances. If a drone transmits pictures of a person who is located on a property that is protected from the public eye, such as by means of a high, dense hedge or a fence, this could violate Article 201a(1) of the German Criminal Code if there is no consent of the person that is being filmed.Footnote 118 For this criminal liability, it is not necessary that the pictures are saved for a certain period of time – mere transmission of the video signal appears to be sufficient.Footnote 119 The person being filmed could therefore be justified if they were to shoot down the drone in order to put an end to the transmission of the pictures.Footnote 120
There are also other circumstances in which a person could be justified in shooting down a drone. A drone filming a person without their consent in a private space could also violate that person’s general right to privacy guaranteed under the German constitution.Footnote 121 Destroying the drone to put an end to the transmission of the pictures and to ward off this attack on their privacy can be justified if there is no other way to prevent the further transmission of pictures.Footnote 122
Finally, flying a drone that is capable of transmitting video signals at a low height (lower than 100 metres above the ground) across a residential property could also violate the property rights of the owner of the property, and could equally entitle the owner of the property to shoot down the drone.Footnote 123
The analysis above serves to highlight the diverse legal issues that a drone flight can raise and that must be mapped and understood before autonomous drone technology can be rolled out in practice. The flight of a drone not only raises legal issues when the drone crash-lands and injures a passer-by; the flight of a drone can lead to civil or even criminal liability through the mere fact that the drone is flying over private property.
V. Conclusion
As this article has demonstrated, identifying the rules that are applicable to the operation of drones in a given scenario and in a given state is difficult. This difficulty is exacerbated by the often piecemeal way in which the law has developed to apply to such operations, touching on areas such as civil liability, privacy or administrative and criminal law, to name but a few. The relevant areas of law and the relevant laws within them also vary significantly between states. This renders the commercial operation of drones challenging for those without access to specialist legal advice or knowledge, and so this may act as a barrier to innovation. The novelty of regulating autonomous machines further adds to this uncertainty.
The complexities and differences between the law of Germany and England have highlighted the difficulty in ascertaining the relevant legal rules for the operation of drones domestically. For real-world operators working in a range of jurisdictions, this becomes a pressing concern. Even in countries that have very similar legal systems, there no guarantees of similarity in the rules relevant to drone operators. Much of the discussion of tort law in this paper is based on English law. Irish tort law has developed with a high degree of similarity to English law, and the development of the Irish law of tort and the practice of the Irish courts often follow the law of the UK.Footnote 124 Nonetheless, the rules in Ireland do not mirror exactly those in the UK, and the level of similarity between the two is likely to cause confusion rather than clarity, given the divergence between the two.
By contrast to Ireland and England, France is a civil law country, like Germany. The rules of drone operation in France are contained, inter alia, in the French Transport Code, and thus any examination of the relevant rules must begin there, but the rules of liability are separate from this and require further interpretation.Footnote 125 The Belgian law on drones is regulated, among others, by a Royal Decree of 10 April 2016, which governs the private and commercial use of drones. This stipulates that professional drone operators cannot operate in populated areas or over the property of third parties without proper authorisation.Footnote 126 Whilst these countries were selected as they represent some of the geographical range of Member States to the RAPID project, they also serve to illustrate the significant variance between the legal regimes in countries that generally share similar approaches to law and regulation.
This article has illustrated that for each country of operation it will be necessary to ascertain what the relevant rules are and how they might apply to a particular drone operation situation. It is then necessary to apply for the relevant permissions prior to commencing the drone operation. Moreover, it may be the case – as in the UK – that autonomous operations, if they are permitted at all, are strictly limited to certain geographical areas, with extensive requirements of prior permission from the relevant regulator, such as the CAA, further hampering the rolling out of this technology.
The level of fragmentation demonstrated presents major issues for the commercial deployment of drones. Not only does it require individualised knowledge of the rules relevant to the jurisdiction in which the drone operation occurs, but also it presents challenges to ensuring that drone operations are carried out in a way that mitigates the risk of liability for those operating drones. Until a more harmonised regime is developed, these problems will persist and thereby make the landscape for the development and harnessing of drone technology a hostile and stifling one.
Acknowledgments
The authors are grateful for comments from Georgios Leloudas, Benjamin Blanck and the anonymous reviewers. The usual disclaimer applies.
Competing interests
The authors declare none.


 Open access
Open access