



1. Introduction
With the development of the technology in observation and recording, the rogue/freak/extreme wave (from now on called a ‘freak wave’) has been generally recognized as a kind of marine disaster instead of a small probability event in special circumstances. The concept of the freak wave was first suggested by Draper (Reference Draper1965), and it occurs when the wave height abnormally exceeds the significant wave height by a factor 2. Under different conditions, the occurrence probability of the freak wave clearly varies, which inspires us to think that the influence mechanism in wave height distribution is more complicated than generally expected.
Research to date indicates that the generation mechanism of the freak wave can be divided into internal and external factors. For the internal factors, the nonlinear interaction plays an important role in the occurrence of freak waves. Through a nonlinear wave evolution model, Benjamin (Reference Benjamin1967) indicated that modulational instability, a phenomenon leading to the energy concentration in a narrow-spectrum wave train, will make the waveform of surface gravity waves significantly unstable in deep water. After the 1990s, it was considered an important cause of freak waves behaving as four-wave interactions in the nonlinear wave model. In the study of Janssen (Reference Janssen2003), the instability in Benjamin (Reference Benjamin1967) is actually an example of a non-resonant four-wave interaction in which the carrier wave is phase-locked with the sidebands. Based on the four-wave interactions and random wave statistics, a complete prediction model of freak waves in deep water is given by Janssen (Reference Janssen2003) and Mori & Janssen (Reference Mori and Janssen2006) and is verified by wave tank experiments (e.g. Mori et al. Reference Mori, Onorato, Janssen, Osborne and Serio2007; Kashima & Mori Reference Kashima and Mori2019). When it comes to the external factors, the bathymetry effect, the interaction with current, wind force and others contribute to the evolution of the nonlinear wave to varying degrees. The bathymetry effect on the water depth and local topography change have been known as significant influencing factors in the second-order nonlinear wave evolution.
For a more general explanation of freak wave occurrence, we need to consider the synthetic effect of internal and external factors. For a uniform unidirectional wave train, the modulational instability has a critical water depth at  $kh = 1.363$ (k, wave number; h, water depth) from Benjamin (Reference Benjamin1967). When
$kh = 1.363$ (k, wave number; h, water depth) from Benjamin (Reference Benjamin1967). When  $kh < 1.363$, the modulational instability disappears, which implies the occurrence of a freak wave in relatively shallow water may decrease due to the attenuation of four-wave interactions. However, when it comes to a directional wavefield without limiting ourselves to collinear instabilities, there is no critical water depth such as
$kh < 1.363$, the modulational instability disappears, which implies the occurrence of a freak wave in relatively shallow water may decrease due to the attenuation of four-wave interactions. However, when it comes to a directional wavefield without limiting ourselves to collinear instabilities, there is no critical water depth such as  $kh = 1.363$ due to the transversal disturbance (Benney & Roskes Reference Benney and Roskes1969; McLean et al. Reference McLean, Ma, Martin, Saffman and Yuen1981). If we think that the four-wave interactions play an important role in the occurrence of the freak wave, the variation of water depth seems to be a non-negligible influencing factor. From the observation record, such as the World Ocean and the coast in Nikolkina & Didenkulova (Reference Nikolkina and Didenkulova2011), the freak wave occurs in deep water and finite and shallow water. Therefore, further investigation of the evolution of the four-wave interactions in the nonlinear modulated wave with the variation of bottom topography is necessary to study freak wave behaviours both offshore and onshore.
$kh = 1.363$ due to the transversal disturbance (Benney & Roskes Reference Benney and Roskes1969; McLean et al. Reference McLean, Ma, Martin, Saffman and Yuen1981). If we think that the four-wave interactions play an important role in the occurrence of the freak wave, the variation of water depth seems to be a non-negligible influencing factor. From the observation record, such as the World Ocean and the coast in Nikolkina & Didenkulova (Reference Nikolkina and Didenkulova2011), the freak wave occurs in deep water and finite and shallow water. Therefore, further investigation of the evolution of the four-wave interactions in the nonlinear modulated wave with the variation of bottom topography is necessary to study freak wave behaviours both offshore and onshore.
For a weakly dispersive long-wave train, its propagation process can be summarized by a partial differential equation in time and space. The nonlinear Schrödinger (NLS) equation (e.g. Zakharov Reference Zakharov1968; Davey & Stewartson Reference Davey and Stewartson1974), which can reflect the nonlinear effect caused by modulation interactions, is widely used to describe the amplitude evolution. From its standard format, a constant depth can be extended to a modified form with varying depth, considering spatial inhomogeneity. For example, Djordjevié & Redekopp (Reference Djordjevié and Redekopp1978) derived a solution for an envelope-hole soliton moving over an uneven bottom and gave a depth-modified NLS (dNLS) equation with a slope effect. Variation of the depth in Liu & Dingemans (Reference Liu and Dingemans1989) was divided into different scales, and then they gave evolution equations for modulated wave groups over an uneven bottom of different types. The evolution of a modulated wave train over an uneven bottom is also discussed in Peregrine (Reference Peregrine1983), Turpin, Benmoussa & Mei (Reference Turpin, Benmoussa and Mei1983) and Mei & Benmoussa (Reference Mei and Benmoussa1984).
Several numerical studies of the different nonlinear evolution equations have been given, such as the NLS-like equation (Zeng & Trulsen Reference Zeng and Trulsen2012; Kimmoun et al. Reference Kimmoun, Hsu, Hoffmann and Chabchoub2021; Lyu, Mori & Kashima Reference Lyu, Mori and Kashima2021), the Korteweg–De Vries (KdV) equation (Sergeeva, Pelinovsky & Talipova Reference Sergeeva, Pelinovsky and Talipova2011; Majda, Moore & Qi Reference Majda, Moore and Qi2019), Boussinesq equations (Gramstad et al. Reference Gramstad, Zeng, Trulsen and Pedersen2013; Kashima, Hirayama & Mori Reference Kashima, Hirayama and Mori2014; Zhang et al. Reference Zhang, Michel Benoit, Kimmoun, Chabchoub and Hsu2019) and other nonlinear methods (Viotti & Dias Reference Viotti and Dias2014; Zheng et al. Reference Zheng, Lin, Li, Adcock, Li and Bremer2020; Lawrence, Trulsen & Gramstad Reference Lawrence, Trulsen and Gramstad2021, etc.). From the research mentioned above, a similar conclusion can be derived, that is, the increase of bottom slope angle will give rise to inhomogeneity of the wavefield and lead to an increase of the kurtosis of surface elevation in very shallow water, which equals to the increase of the exceedance probability of extreme wave height  $P_m(H_{max})$ occurring; here
$P_m(H_{max})$ occurring; here  $P_m$ represents the cumulative distribution function (CDF) and H represents wave height. The abrupt slope change, like the demarcation point between the sloping section (deep to shallow) and the flat bottom, gives a significant increase of
$P_m$ represents the cumulative distribution function (CDF) and H represents wave height. The abrupt slope change, like the demarcation point between the sloping section (deep to shallow) and the flat bottom, gives a significant increase of  ${P_m}({H_{max}})$ as well as the skewness
${P_m}({H_{max}})$ as well as the skewness  ${\mu _3}$ of the surface elevation, which suggests the bathymetry effect is more reflected by the second-order effect. If we compare the numerical results in flat bottoms with different water depths,
${\mu _3}$ of the surface elevation, which suggests the bathymetry effect is more reflected by the second-order effect. If we compare the numerical results in flat bottoms with different water depths,  ${P_m}({H_{max}})$ decreases from deep to medium water, as well as the kurtosis
${P_m}({H_{max}})$ decreases from deep to medium water, as well as the kurtosis  ${\mu _4}$ of surface elevation, and it corresponds to Benjamin's (Reference Benjamin1967) result of the evolution of modulational instability: in shallow water
${\mu _4}$ of surface elevation, and it corresponds to Benjamin's (Reference Benjamin1967) result of the evolution of modulational instability: in shallow water  $kh \le 1.363$, modulational instability disappears and
$kh \le 1.363$, modulational instability disappears and  ${\mu _4}$ shows an inverse effect on the unidirectional wave train in the deep-water case. The variation of
${\mu _4}$ shows an inverse effect on the unidirectional wave train in the deep-water case. The variation of  ${P_m}({H_{max}})$ with depth change can also be referred to Mendes et al. (Reference Mendes, Scotti, Brunetti and Kasparian2022), in which the second-order theory provides a physical explanation about wave statistics.
${P_m}({H_{max}})$ with depth change can also be referred to Mendes et al. (Reference Mendes, Scotti, Brunetti and Kasparian2022), in which the second-order theory provides a physical explanation about wave statistics.
A similar process in shallow water can be verified in experiments. Physical modelling experiments can provide a reference for the steeper slope case and more variety of bottom topography as shown by Trulsen, Zeng & Gramstad (Reference Trulsen, Zeng and Gramstad2012), Kashima et al. (Reference Kashima, Hirayama and Mori2014), Ma, Dong & Ma (Reference Ma, Dong and Ma2014), Bolles, Speer & Moore (Reference Bolles, Speer and Moore2019), Zhang et al. (Reference Zhang, Michel Benoit, Kimmoun, Chabchoub and Hsu2019), Kashima & Mori (Reference Kashima and Mori2019), Trulsen et al. (Reference Trulsen, Raustøl, Jorde and Rye2020) and Lawrence et al. (Reference Lawrence, Trulsen and Gramstad2021), Lawrence, Trulsen & Gramstad (Reference Lawrence, Trulsen and Gramstad2022). The values of kurtosis  ${\mu _4}$ and skewness
${\mu _4}$ and skewness  ${\mu _3}$ show a local maximum near the edge between the sloping bottom and flat bottom (deep to shallow). As the slope angle becomes very steep, this local maximum reaches its peak at the abrupt depth transitions in shallow water (Zheng et al. Reference Zheng, Lin, Li, Adcock, Li and Bremer2020; Li et al. Reference Li, Draycott, Zheng, Lin, Adcock and Bremer2021).
${\mu _3}$ show a local maximum near the edge between the sloping bottom and flat bottom (deep to shallow). As the slope angle becomes very steep, this local maximum reaches its peak at the abrupt depth transitions in shallow water (Zheng et al. Reference Zheng, Lin, Li, Adcock, Li and Bremer2020; Li et al. Reference Li, Draycott, Zheng, Lin, Adcock and Bremer2021).
It should be pointed out that most of the numerical and experimental studies to date concentrate on the unidirectional wave train. The wave behaviours in the natural state are a two-dimensional (2-D) hydrodynamic problem. The stability of deep-water random waves in 2-D space is discussed in Alber & Saffman (Reference Alber and Saffman1978). For long-crested irregular waves propagating over 2-D bathymetry, Lawrence et al. (Reference Lawrence, Trulsen and Gramstad2022) discussed the statistical properties of the surface elevation and the velocity field through numerical simulation using the high-order spectral method. In addition, a 2-D wavefield model can provide the directional wave spreading due to wind or current effect and the dispersion in one more horizontal dimension. Recent works show that the four-wave interaction decreases due to the directional dispersion effects. The maximum wave height in a directional wavefield decreases with the unidirectional wave in numerical simulation through a modified form of the NLS equation in Gramstad & Trulsen (Reference Gramstad and Trulsen2007). The enhancement of kurtosis is significantly suppressed by the increase of directional spread in the directional wave in Waseda (Reference Waseda2006), Waseda, Kinoshita & Tamura (Reference Waseda, Kinoshita and Tamura2009) and Onorato et al. (Reference Onorato2009a,Reference Onoratob). Based on the contribution from the directional bandwidth in the directional spectrum, Mori, Onorato & Janssen (Reference Mori, Onorato and Janssen2011) gave the theoretical estimation of kurtosis for directional sea states, and the fourth-order cumulant and directional spreading can predict the occurrence probability of freak waves. However, a comprehensive discussion about the bathymetry effect on the 2-D modulated wave is still to be had.
To develop the freak wave analysis in 2-D wavefields, this study investigates the directional nonlinear modulated wave evolution in an uneven bottom as an expansion to the work of Lyu et al. (Reference Lyu, Mori and Kashima2021). The dNLS equation in 2-D form for a slow-varying bottom is applied to establish the numerical model. In a 2-D wave basin, we consider the directional dispersion effect as part of the initial value problem and discuss how to compare the roles in the wave evolution of different parameters such as the slope angle, the water depth and directional spreading. Random wave statistics and a Monte Carlo simulation are conducted to give the evolution of the nonlinear effect and the distribution of extreme events in 2-D space–time (2-D + T). Section 2 gives the derivation of the theoretical model and its numerical solution. Section 3 gives the computation result and the discussion, and they are summarized in § 4. This article concentrates on the case when the wave is normally incident with the contour line of the bottom, so we do not consider the wave refraction. The oblique wave case will be given in the later work, Part 2.
2. Methodology
2.1. Two-dimensional dNLS equation for an uneven bottom
For a 2-D flow field, we continue to assume the flow is irrotational, inviscid and incompressible with a free water surface. A coordinate system  $(x,y,z)$ is defined with origin O, as shown in figure 1. Plane
$(x,y,z)$ is defined with origin O, as shown in figure 1. Plane  $Oxy$ is defined along the quiescent water surface, and z axis is defined in the vertically upward direction, opposite to gravitational acceleration g. An incident directional random wave train comes from an external field, and its principal wave direction is along the x axis. The bottom
$Oxy$ is defined along the quiescent water surface, and z axis is defined in the vertically upward direction, opposite to gravitational acceleration g. An incident directional random wave train comes from an external field, and its principal wave direction is along the x axis. The bottom  $z ={-} h(x,y)$ mainly varies in the principal direction in the region between dashed lines A and B. Velocity potential
$z ={-} h(x,y)$ mainly varies in the principal direction in the region between dashed lines A and B. Velocity potential  $\varPhi $ and free surface elevation
$\varPhi $ and free surface elevation  $\eta $ are defined as
$\eta $ are defined as
 \begin{equation}\varPhi = \varPhi (x,y,z,t),\quad \eta = \eta (x,y,t),\end{equation}
\begin{equation}\varPhi = \varPhi (x,y,z,t),\quad \eta = \eta (x,y,t),\end{equation}where t represents time.

Figure 1. Sketch of the wave propagating over an uneven bottom in a 2-D wavefield.
In the entire flow field,  $\varPhi $ is a solution of the Laplace equation to satisfy continuity
$\varPhi $ is a solution of the Laplace equation to satisfy continuity
 \begin{equation}{\nabla ^2}\varPhi = \frac{{{\partial ^2}\varPhi }}{{\partial {x^2}}} + \frac{{{\partial ^2}\varPhi }}{{\partial {y^2}}} + \frac{{{\partial ^2}\varPhi }}{{\partial {z^2}}} = 0.\end{equation}
\begin{equation}{\nabla ^2}\varPhi = \frac{{{\partial ^2}\varPhi }}{{\partial {x^2}}} + \frac{{{\partial ^2}\varPhi }}{{\partial {y^2}}} + \frac{{{\partial ^2}\varPhi }}{{\partial {z^2}}} = 0.\end{equation}
On the boundary of the free surface  $\; z = \eta (x,y,t)$,
$\; z = \eta (x,y,t)$,  $\varPhi $ and
$\varPhi $ and  $\eta $ satisfy the kinematic boundary condition (i.e. free surface equation) and the dynamic boundary condition (i.e. Bernoulli equation)
$\eta $ satisfy the kinematic boundary condition (i.e. free surface equation) and the dynamic boundary condition (i.e. Bernoulli equation)
 \begin{gather}\frac{{\partial \varPhi }}{{\partial z}} = \frac{{\partial \eta }}{{\partial t}} + \frac{{\partial \varPhi }}{{\partial x}}\frac{{\partial \eta }}{{\partial x}} + \frac{{\partial \varPhi }}{{\partial y}}\frac{{\partial \eta }}{{\partial y}},\quad z = \eta ,\end{gather}
\begin{gather}\frac{{\partial \varPhi }}{{\partial z}} = \frac{{\partial \eta }}{{\partial t}} + \frac{{\partial \varPhi }}{{\partial x}}\frac{{\partial \eta }}{{\partial x}} + \frac{{\partial \varPhi }}{{\partial y}}\frac{{\partial \eta }}{{\partial y}},\quad z = \eta ,\end{gather} \begin{gather}2\frac{{\partial \varPhi }}{{\partial t}} + 2g\eta + {\left( {\frac{{\partial \varPhi }}{{\partial x}}} \right)^2} + {\left( {\frac{{\partial \varPhi }}{{\partial y}}} \right)^2} + {\left( {\frac{{\partial \varPhi }}{{\partial z}}} \right)^2} = 0,\quad z = \eta .\end{gather}
\begin{gather}2\frac{{\partial \varPhi }}{{\partial t}} + 2g\eta + {\left( {\frac{{\partial \varPhi }}{{\partial x}}} \right)^2} + {\left( {\frac{{\partial \varPhi }}{{\partial y}}} \right)^2} + {\left( {\frac{{\partial \varPhi }}{{\partial z}}} \right)^2} = 0,\quad z = \eta .\end{gather}
At the bottom of the flow field,  $\varPhi $ satisfies the no-flux boundary along the seafloor. If the water depth h is constant at a flat bottom
$\varPhi $ satisfies the no-flux boundary along the seafloor. If the water depth h is constant at a flat bottom  $z ={-} h$,
$z ={-} h$,  $\varPhi $ satisfies the flat bottom equation
$\varPhi $ satisfies the flat bottom equation
 \begin{equation}\frac{{\partial \varPhi }}{{\partial z}} = 0,\quad z ={-} h.\end{equation}
\begin{equation}\frac{{\partial \varPhi }}{{\partial z}} = 0,\quad z ={-} h.\end{equation}
If we assume, the bottom is uneven, and water depth varies at  $z ={-} h(x,y)$,
$z ={-} h(x,y)$,  $\varPhi $ satisfies the uneven bottom equation
$\varPhi $ satisfies the uneven bottom equation
 \begin{equation}\frac{{\partial \varPhi }}{{\partial z}} + \frac{{\partial h}}{{\partial x}}\frac{{\partial \varPhi }}{{\partial x}} + \frac{{\partial h}}{{\partial y}}\frac{{\partial \varPhi }}{{\partial y}} = 0,\quad z ={-} h(x,y).\end{equation}
\begin{equation}\frac{{\partial \varPhi }}{{\partial z}} + \frac{{\partial h}}{{\partial x}}\frac{{\partial \varPhi }}{{\partial x}} + \frac{{\partial h}}{{\partial y}}\frac{{\partial \varPhi }}{{\partial y}} = 0,\quad z ={-} h(x,y).\end{equation} Based on the periodicity of time and space in the propagation of gravity waves, wave frequency  $\omega $ and wavenumber k satisfy the linear dispersion relation
$\omega $ and wavenumber k satisfy the linear dispersion relation
 \begin{equation}\omega = \sqrt {gk\sigma } ,\end{equation}
\begin{equation}\omega = \sqrt {gk\sigma } ,\end{equation}
where  $\sigma = \tanh kh$. For a medium that has no temporal variation, carrier wave frequency
$\sigma = \tanh kh$. For a medium that has no temporal variation, carrier wave frequency  $\omega = {\omega _0}$, where subscript 0 represents a constant angular frequency independent of the variable bathymetry. For a flat bottom with a constant water depth h, carrier wavenumber
$\omega = {\omega _0}$, where subscript 0 represents a constant angular frequency independent of the variable bathymetry. For a flat bottom with a constant water depth h, carrier wavenumber  $k = {k_0}$ is also constant as
$k = {k_0}$ is also constant as  $\omega $; for an uneven bottom, wavenumber k will be changed because of spatial inhomogeneity due to the bottom topography. The change in wave dispersion will also be reflected in the group speed
$\omega $; for an uneven bottom, wavenumber k will be changed because of spatial inhomogeneity due to the bottom topography. The change in wave dispersion will also be reflected in the group speed  ${c_g}$
${c_g}$
 \begin{equation}{c_g} = \frac{g}{{2{\omega _0}}}[\sigma + kh(1 - {\sigma ^2})].\end{equation}
\begin{equation}{c_g} = \frac{g}{{2{\omega _0}}}[\sigma + kh(1 - {\sigma ^2})].\end{equation}
In other words, k and  ${c_g}$ are functions of h.
${c_g}$ are functions of h.
For a weakly nonlinear wave train, the modulation parameter comes from the contribution from the small perturbation in high-order harmonic, so we further expand the velocity potential  $\varPhi $ and free surface elevation
$\varPhi $ and free surface elevation  $\eta $ into harmonic functions. In this research, we assume the modulation caused by the nonlinear effect and the depth variations are of the same order of magnitude, referring to Liu & Dingemans (Reference Liu and Dingemans1989). Therefore, we make this small parameter equal to wave steepness
$\eta $ into harmonic functions. In this research, we assume the modulation caused by the nonlinear effect and the depth variations are of the same order of magnitude, referring to Liu & Dingemans (Reference Liu and Dingemans1989). Therefore, we make this small parameter equal to wave steepness  $\varepsilon $, and expand
$\varepsilon $, and expand  $\varPhi $ and
$\varPhi $ and  $\eta $ in the form of
$\eta $ in the form of
 \begin{gather}\varPhi (x,y,z,t) = \sum\limits_{n = 1}^\infty {{\varepsilon ^n}} \left[ {\sum\limits_{m ={-} n}^n {{\Phi_{nm}}(x,y,z,t){E^m}} } \right],\end{gather}
\begin{gather}\varPhi (x,y,z,t) = \sum\limits_{n = 1}^\infty {{\varepsilon ^n}} \left[ {\sum\limits_{m ={-} n}^n {{\Phi_{nm}}(x,y,z,t){E^m}} } \right],\end{gather} \begin{gather}\eta (x,y,t) = \sum\limits_{n = 1}^\infty {{\varepsilon ^n}} \left[ {\sum\limits_{m ={-} n}^n {{\eta_{nm}}(x,y,t){E^m}} } \right],\end{gather}
\begin{gather}\eta (x,y,t) = \sum\limits_{n = 1}^\infty {{\varepsilon ^n}} \left[ {\sum\limits_{m ={-} n}^n {{\eta_{nm}}(x,y,t){E^m}} } \right],\end{gather} \begin{gather}E = \exp \left\{ {\textrm{i}\left[ {\int_{}^x {k(x)\,\textrm{d}\kern0.7pt x - {\omega_0}t} } \right]} \right\},\end{gather}
\begin{gather}E = \exp \left\{ {\textrm{i}\left[ {\int_{}^x {k(x)\,\textrm{d}\kern0.7pt x - {\omega_0}t} } \right]} \right\},\end{gather}
where E represents the harmonic functions, and the complex conjugates part satisfy  ${\varPhi _{n, - m}} = {\tilde{\varPhi }_{nm}},{\eta _{n, - m}} = {\tilde{\eta }_{nm}}$. We take
${\varPhi _{n, - m}} = {\tilde{\varPhi }_{nm}},{\eta _{n, - m}} = {\tilde{\eta }_{nm}}$. We take  $n \le 3$ in the derivation since
$n \le 3$ in the derivation since  $\varepsilon $ is very small.
$\varepsilon $ is very small.
With the expansion of  $\varPhi $ and
$\varPhi $ and  $\eta $ to the third order of
$\eta $ to the third order of  $\varepsilon $, the method of multiple scales introduced in Davey & Stewartson (Reference Davey and Stewartson1974) is applied to give the solution at different orders and harmonic. The details in this process are similar to Hasimoto & Ono (Reference Hasimoto and Ono1972). To simplify the problem, we suppose that the water depth h varies slowly. Additionally, we want to concentrate on the variation of depth in the wave propagation direction, so we assume the magnitude of the gradient of depth change satisfies
$\varepsilon $, the method of multiple scales introduced in Davey & Stewartson (Reference Davey and Stewartson1974) is applied to give the solution at different orders and harmonic. The details in this process are similar to Hasimoto & Ono (Reference Hasimoto and Ono1972). To simplify the problem, we suppose that the water depth h varies slowly. Additionally, we want to concentrate on the variation of depth in the wave propagation direction, so we assume the magnitude of the gradient of depth change satisfies  $h^{\prime}(x)\sim O({\varepsilon ^2})$ and
$h^{\prime}(x)\sim O({\varepsilon ^2})$ and  $h^{\prime}(y)\sim O({\varepsilon ^3})$. Considering the expansion form in (2.9) and (2.10), the effect of bottom topography change is only reflected in the third order
$h^{\prime}(y)\sim O({\varepsilon ^3})$. Considering the expansion form in (2.9) and (2.10), the effect of bottom topography change is only reflected in the third order  $O({\varepsilon ^3})$ and
$O({\varepsilon ^3})$ and  $h^{\prime}(y)\sim O({\varepsilon ^3})$ is equivalent to
$h^{\prime}(y)\sim O({\varepsilon ^3})$ is equivalent to  $h^{\prime}(y) = 0$. As for the dispersion relation between wavenumber and frequency, the carrier
$h^{\prime}(y) = 0$. As for the dispersion relation between wavenumber and frequency, the carrier  $\omega = {\omega _0}$ is still constant since there is no temporal variation, but the carrier wavenumber k changes. Based on the above inference, we can get
$\omega = {\omega _0}$ is still constant since there is no temporal variation, but the carrier wavenumber k changes. Based on the above inference, we can get  $k = k(x)$ and
$k = k(x)$ and  ${c_g} = {c_g}(x )$ on the principal wave direction, and we can introduce a specific variable substitution of t and
${c_g} = {c_g}(x )$ on the principal wave direction, and we can introduce a specific variable substitution of t and  $\; x$, referring to Djordjevié & Redekopp (Reference Djordjevié and Redekopp1978)
$\; x$, referring to Djordjevié & Redekopp (Reference Djordjevié and Redekopp1978)
 \begin{equation}\tau = \varepsilon \left[ {\int_{}^x {\frac{{\textrm{d}\kern0.7pt x}}{{{c_g}(x)}}} - t} \right],\quad \xi = {\varepsilon ^2}x,\;\zeta = \varepsilon y.\end{equation}
\begin{equation}\tau = \varepsilon \left[ {\int_{}^x {\frac{{\textrm{d}\kern0.7pt x}}{{{c_g}(x)}}} - t} \right],\quad \xi = {\varepsilon ^2}x,\;\zeta = \varepsilon y.\end{equation} We apply (2.12) to transfer  $(x,y,t)$ to
$(x,y,t)$ to  $(\xi ,\zeta ,\tau )$ and put (2.9)–(2.11) into (2.1)–(2.6), then the evolution equation of envelope
$(\xi ,\zeta ,\tau )$ and put (2.9)–(2.11) into (2.1)–(2.6), then the evolution equation of envelope  $\bar{A}(\xi ,\zeta ,\tau )$ for a very mild slope can be given in the form of
$\bar{A}(\xi ,\zeta ,\tau )$ for a very mild slope can be given in the form of
 \begin{equation}\textrm{i}{\beta _h}\bar{A} + \textrm{i}\frac{{\partial \bar{A}}}{{\partial \xi }} + {\beta _t}\frac{{{\partial ^2}\bar{A}}}{{\partial {\tau ^2}}} + {\beta _y}\frac{{{\partial ^2}\bar{A}}}{{\partial {\zeta ^2}}} = {\beta _n}|\bar{A}{|^2}\bar{A},\end{equation}
\begin{equation}\textrm{i}{\beta _h}\bar{A} + \textrm{i}\frac{{\partial \bar{A}}}{{\partial \xi }} + {\beta _t}\frac{{{\partial ^2}\bar{A}}}{{\partial {\tau ^2}}} + {\beta _y}\frac{{{\partial ^2}\bar{A}}}{{\partial {\zeta ^2}}} = {\beta _n}|\bar{A}{|^2}\bar{A},\end{equation}where
 \begin{gather}{\beta _h} = \frac{{(1 - {\sigma ^2})(1 - kh\sigma )}}{{\sigma + kh(1 - {\sigma ^2})}}\frac{{\textrm{d}(kh)}}{{\textrm{d}\xi }} = \frac{1}{{2{c_g}}}\frac{{\textrm{d}({c_g})}}{{\textrm{d}\xi }},\end{gather}
\begin{gather}{\beta _h} = \frac{{(1 - {\sigma ^2})(1 - kh\sigma )}}{{\sigma + kh(1 - {\sigma ^2})}}\frac{{\textrm{d}(kh)}}{{\textrm{d}\xi }} = \frac{1}{{2{c_g}}}\frac{{\textrm{d}({c_g})}}{{\textrm{d}\xi }},\end{gather} \begin{gather}{\beta _t} ={-} \frac{1}{{2{\omega _0}{c_g}}}\left[ {1 - \frac{{gh}}{{c_g^2}}(1 - {\sigma^2})(1 - kh\sigma )} \right],\end{gather}
\begin{gather}{\beta _t} ={-} \frac{1}{{2{\omega _0}{c_g}}}\left[ {1 - \frac{{gh}}{{c_g^2}}(1 - {\sigma^2})(1 - kh\sigma )} \right],\end{gather} \begin{gather}{\beta _y} = \frac{1}{{2k}}\frac{{\partial \omega }}{{\partial k}} \equiv \frac{{{c_g}}}{{2k}},\end{gather}
\begin{gather}{\beta _y} = \frac{1}{{2k}}\frac{{\partial \omega }}{{\partial k}} \equiv \frac{{{c_g}}}{{2k}},\end{gather} \begin{gather}\begin{gathered}
{\beta _n} = {k^2}{\omega _0}\left[ {\dfrac{1}{{16}}(9 -
10{\sigma^2} + 9{\sigma^4}) -
\dfrac{1}{{2\textrm{sin}{\textrm{h}^2}2kh}}} \right]\\
+ \left[
{\dfrac{{\omega_0^3}}{g}\dfrac{1}{{2g}}({\sigma^2} - 1) +
\dfrac{k}{{{c_g}}}} \right]\left( {\dfrac{{c_g^2}}{{c_g^2 -
gh}}} \right)\left[ {\dfrac{{{g^2}k}}{{2{\omega_0}{c_g}}} +
\dfrac{{\omega_0^2}}{{4\textrm{sinh}{{(kh)}^2}}}} \right].
\end{gathered}\end{gather}
\begin{gather}\begin{gathered}
{\beta _n} = {k^2}{\omega _0}\left[ {\dfrac{1}{{16}}(9 -
10{\sigma^2} + 9{\sigma^4}) -
\dfrac{1}{{2\textrm{sin}{\textrm{h}^2}2kh}}} \right]\\
+ \left[
{\dfrac{{\omega_0^3}}{g}\dfrac{1}{{2g}}({\sigma^2} - 1) +
\dfrac{k}{{{c_g}}}} \right]\left( {\dfrac{{c_g^2}}{{c_g^2 -
gh}}} \right)\left[ {\dfrac{{{g^2}k}}{{2{\omega_0}{c_g}}} +
\dfrac{{\omega_0^2}}{{4\textrm{sinh}{{(kh)}^2}}}} \right].
\end{gathered}\end{gather}
Here,  ${\beta _h}$ represents the contribution from topography change, which is proportional to the derivative of the wavenumber with respect to coordinate
${\beta _h}$ represents the contribution from topography change, which is proportional to the derivative of the wavenumber with respect to coordinate  $\xi $. When the topography change becomes very small,
$\xi $. When the topography change becomes very small,  ${\beta _h} \approx 0$ and (2.13) is equivalent to the evolution equation in Davey & Stewartson (Reference Davey and Stewartson1974). Here,
${\beta _h} \approx 0$ and (2.13) is equivalent to the evolution equation in Davey & Stewartson (Reference Davey and Stewartson1974). Here,  ${\beta _t}$ and
${\beta _t}$ and  ${\beta _y}$ give the local curvature based on the linear dispersion relation for carrier wave period and lateral component of wavenumber, respectively, and
${\beta _y}$ give the local curvature based on the linear dispersion relation for carrier wave period and lateral component of wavenumber, respectively, and  ${\beta _n}$ represents the contribution from the nonlinear effect due to the quasi-resonant four-wave interaction.
${\beta _n}$ represents the contribution from the nonlinear effect due to the quasi-resonant four-wave interaction.
2.2. Numerical solution and freak wave estimation
In the 1-D problem of the unidirectional wave train, as in Lyu et al. (Reference Lyu, Mori and Kashima2021), the evolution equation of  $\bar{A}$ is numerically solved in a spatial step by the pseudo-spectral method. Based on the periodicity of the wave envelop in time and space, the partial differential term in the evolution equation can be transformed into a more concise form by using Fourier transform. In the 1-D problem, we can simplify the partial differential term with respect to time and express it in the frequency domain. In the 2-D problem, the variation in the lateral direction requires the consideration of one more dimension. Based on the periodicity of time and space for a 2-D wavefield, the 2-D Fourier transform is applied to transform (2.13) into an ordinary differential equation
$\bar{A}$ is numerically solved in a spatial step by the pseudo-spectral method. Based on the periodicity of the wave envelop in time and space, the partial differential term in the evolution equation can be transformed into a more concise form by using Fourier transform. In the 1-D problem, we can simplify the partial differential term with respect to time and express it in the frequency domain. In the 2-D problem, the variation in the lateral direction requires the consideration of one more dimension. Based on the periodicity of time and space for a 2-D wavefield, the 2-D Fourier transform is applied to transform (2.13) into an ordinary differential equation
 \begin{equation}\frac{{\textrm{d}\bar{A}}}{{\textrm{d}\xi }} ={-} \textrm{i}{\beta _n}|\bar{A}{|^2}\bar{A} - \textrm{i}{\beta _t}\omega _\tau ^2\bar{A} - \textrm{i}{\beta _y}k_\zeta ^2\bar{A} - {\beta _h}\bar{A},\end{equation}
\begin{equation}\frac{{\textrm{d}\bar{A}}}{{\textrm{d}\xi }} ={-} \textrm{i}{\beta _n}|\bar{A}{|^2}\bar{A} - \textrm{i}{\beta _t}\omega _\tau ^2\bar{A} - \textrm{i}{\beta _y}k_\zeta ^2\bar{A} - {\beta _h}\bar{A},\end{equation}
where we take the Fourier transformation  ${F_\tau }$ with respect to
${F_\tau }$ with respect to  $\tau $ on time and
$\tau $ on time and  ${F_\zeta }$ with respect to
${F_\zeta }$ with respect to  $\zeta $ on lateral spatial coordinate, respectively, and
$\zeta $ on lateral spatial coordinate, respectively, and  ${\omega _\tau }$ and
${\omega _\tau }$ and  ${k_\zeta }$ represent corresponding variables about the frequency and the lateral wavenumber in the Fourier transform
${k_\zeta }$ represent corresponding variables about the frequency and the lateral wavenumber in the Fourier transform
 \begin{equation}\dot{A}({\omega _\tau },\xi ,\zeta ) = {F_\tau }[\bar{A}(\tau ,\xi ,\zeta )],\quad \; \ddot{A}({\omega _\tau },\xi ,{k_\zeta }) = {F_\zeta }[\dot{A}({\omega _\tau },\xi ,\zeta )].\end{equation}
\begin{equation}\dot{A}({\omega _\tau },\xi ,\zeta ) = {F_\tau }[\bar{A}(\tau ,\xi ,\zeta )],\quad \; \ddot{A}({\omega _\tau },\xi ,{k_\zeta }) = {F_\zeta }[\dot{A}({\omega _\tau },\xi ,\zeta )].\end{equation}
Through the spatial evolution of  $\xi $ in (2.15), the wave envelope can be numerically simulated from an initial condition at
$\xi $ in (2.15), the wave envelope can be numerically simulated from an initial condition at  $\xi = {\xi _0}$. We assume the initial Fourier amplitude
$\xi = {\xi _0}$. We assume the initial Fourier amplitude  $\ddot{A}({\omega _\tau },{\xi _0},{k_\zeta })$ satisfies the 2-D Gaussian shape directional spectral
$\ddot{A}({\omega _\tau },{\xi _0},{k_\zeta })$ satisfies the 2-D Gaussian shape directional spectral
 \begin{align}\ddot{A}({\omega _\tau },{\xi _0},{k_\zeta }) = \ddot{A}({\omega _\tau },{\xi _0},{\theta _\zeta }) = \frac{a}{{2{\rm \pi}{\sigma _\omega }{\sigma _\theta }}}\exp \left\{ { - \frac{1}{2}\left[ {{{\left( {\frac{{{\omega_\tau } - {\omega_0}}}{{{\sigma_\omega }}}} \right)}^2} + {{\left( {\frac{{{\theta_\zeta } - {\theta_0}}}{{{\sigma_\theta }}}} \right)}^2}} \right] + \textrm{i}\psi } \right\},\end{align}
\begin{align}\ddot{A}({\omega _\tau },{\xi _0},{k_\zeta }) = \ddot{A}({\omega _\tau },{\xi _0},{\theta _\zeta }) = \frac{a}{{2{\rm \pi}{\sigma _\omega }{\sigma _\theta }}}\exp \left\{ { - \frac{1}{2}\left[ {{{\left( {\frac{{{\omega_\tau } - {\omega_0}}}{{{\sigma_\omega }}}} \right)}^2} + {{\left( {\frac{{{\theta_\zeta } - {\theta_0}}}{{{\sigma_\theta }}}} \right)}^2}} \right] + \textrm{i}\psi } \right\},\end{align}
where  $\; a$ represents the standard deviation of the envelop and
$\; a$ represents the standard deviation of the envelop and  $\varepsilon = ka$,
$\varepsilon = ka$,  ${\theta _\zeta } = \arctan ({k_\zeta }/{k_0})$ represents the direction of a single wave with the lateral wavenumber
${\theta _\zeta } = \arctan ({k_\zeta }/{k_0})$ represents the direction of a single wave with the lateral wavenumber  ${k_\zeta }$,
${k_\zeta }$,  ${k_0}$ and
${k_0}$ and  ${\omega _0}$ are carrier wavenumber and frequency,
${\omega _0}$ are carrier wavenumber and frequency,  ${\sigma _\theta }$ is dimensionless directional width,
${\sigma _\theta }$ is dimensionless directional width,  $\psi $ is the random phase uniformly distributed at
$\psi $ is the random phase uniformly distributed at  $[0,2{\rm \pi}],\; {\sigma _\omega }$ is frequency spectral width and we will also use its dimensionless form
$[0,2{\rm \pi}],\; {\sigma _\omega }$ is frequency spectral width and we will also use its dimensionless form  ${\sigma _s} = {\sigma _\omega }/{\omega _0}$ in the following discussion. Also,
${\sigma _s} = {\sigma _\omega }/{\omega _0}$ in the following discussion. Also,  ${\theta _0}$ is the principal wave direction, and here we set
${\theta _0}$ is the principal wave direction, and here we set  ${\theta _0}$ is fixed at
${\theta _0}$ is fixed at  ${\theta _0} = 0$. When
${\theta _0} = 0$. When  ${\theta _0} \ne 0$, the incident wave is oblique with the contour line of topography, and wave refraction will occur due to the inhomogeneity of the dispersion relation on the wave front line. This part of the discussion will be given in Part 2.
${\theta _0} \ne 0$, the incident wave is oblique with the contour line of topography, and wave refraction will occur due to the inhomogeneity of the dispersion relation on the wave front line. This part of the discussion will be given in Part 2.
In this problem, the initial spectrum is decided by the contribution from both the temporal and spatial frequency, and  $\ddot{A}$ distributed in a 2-D plane about frequency
$\ddot{A}$ distributed in a 2-D plane about frequency  ${\omega _\tau }$ and
${\omega _\tau }$ and  ${k_\zeta }$ (or
${k_\zeta }$ (or  ${\theta _\zeta }$). Referring to the 1-D problem as in Janssen (Reference Janssen2003), the Benjamin–Feir index (BFI) is defined as the ratio between wave steepness
${\theta _\zeta }$). Referring to the 1-D problem as in Janssen (Reference Janssen2003), the Benjamin–Feir index (BFI) is defined as the ratio between wave steepness  $\varepsilon $ and dimensionless spectral bandwidth
$\varepsilon $ and dimensionless spectral bandwidth  ${\sigma _s}$
${\sigma _s}$
 \begin{equation}BFI = \frac{{\sqrt 2 \varepsilon }}{{{\sigma _s}}}.\end{equation}
\begin{equation}BFI = \frac{{\sqrt 2 \varepsilon }}{{{\sigma _s}}}.\end{equation}
In this study, we hope to separate the effect from different contributions in the temporal and spatial parts and concentrate more on the directional dispersion effect, so we continue to use (2.18) as the definition of BFI in the initial condition. The parameter  ${\sigma _\theta }$ will be taken as an individual parameter in the spectral bandwidth, and
${\sigma _\theta }$ will be taken as an individual parameter in the spectral bandwidth, and  ${\sigma _s}$ is set as constant (i.e.
${\sigma _s}$ is set as constant (i.e.  ${\sigma _\omega }$ is constant in (2.17)).
${\sigma _\omega }$ is constant in (2.17)).
In the principal wave propagation direction, we can solve the wave envelope  $\bar{A}$ at each spatial step on x (or
$\bar{A}$ at each spatial step on x (or  $\xi $) through (2.15), and give the wave surface elevation
$\xi $) through (2.15), and give the wave surface elevation  $\eta $ by (2.19)
$\eta $ by (2.19)
 \begin{equation}\eta (x,y,t) = \varepsilon Re \left[ {\frac{1}{2}\bar{A}(x,y,t)E} \right] + {\varepsilon ^2}Re \left[ {\frac{{k\cosh kh}}{{8{{\sinh }^3}kh}}(2{{\cosh }^2}kh + 1){{\bar{A}}^2}(x,y,t){E^2}} \right].\end{equation}
\begin{equation}\eta (x,y,t) = \varepsilon Re \left[ {\frac{1}{2}\bar{A}(x,y,t)E} \right] + {\varepsilon ^2}Re \left[ {\frac{{k\cosh kh}}{{8{{\sinh }^3}kh}}(2{{\cosh }^2}kh + 1){{\bar{A}}^2}(x,y,t){E^2}} \right].\end{equation} Similar to Lyu et al. (Reference Lyu, Mori and Kashima2021), we integrate  $\eta (y,t)$ in (2.19) at each step from offshore to onshore, assuming periodic boundary conditions in time, and construct the surface elevation in a discrete 2-D + T form. Equation (2.19) considers the contribution from first order to second order and second harmonic. The progressive wave is established on the periodicity only in
$\eta (y,t)$ in (2.19) at each step from offshore to onshore, assuming periodic boundary conditions in time, and construct the surface elevation in a discrete 2-D + T form. Equation (2.19) considers the contribution from first order to second order and second harmonic. The progressive wave is established on the periodicity only in  $({\smallint ^x}k(x)\,\textrm{d}\kern0.7pt x - {\omega _0}t)$, because of the contribution of
$({\smallint ^x}k(x)\,\textrm{d}\kern0.7pt x - {\omega _0}t)$, because of the contribution of  ${k_{\zeta 0}} = 0$ to the component of lateral length y of the carrier propagating direction.
${k_{\zeta 0}} = 0$ to the component of lateral length y of the carrier propagating direction.
Because of the very small probability of freak wave occurrence, an ensemble simulation size is necessary to provide a more reliable prediction. In this study, we continue to estimate the nonlinear interaction in wave evolution by the fourth-order moment kurtosis  ${\mu _4}$ and the third-order moment skewness
${\mu _4}$ and the third-order moment skewness  ${\mu _3}$, and their variation will be compared with the wave height distribution directly obtained from the 2-D + T surface elevation data in a large-size Monte Carlo simulation.
${\mu _3}$, and their variation will be compared with the wave height distribution directly obtained from the 2-D + T surface elevation data in a large-size Monte Carlo simulation.
Parameters  ${\mu _4}$ and
${\mu _4}$ and  ${\mu _3}$ of a fixed point
${\mu _3}$ of a fixed point  $({x_\ast },{y_\ast })$ in the wavefield are derived from the discrete surface elevation
$({x_\ast },{y_\ast })$ in the wavefield are derived from the discrete surface elevation  $\eta ({x_\ast },{y_\ast },t)$ in time series
$\eta ({x_\ast },{y_\ast },t)$ in time series
 \begin{equation}{\mu _4} = \frac{{Ex{{({\eta _i} - \bar{\eta })}^4}}}{{\eta _{rms}^4}},\quad {\mu _3} = \frac{{Ex{{({\eta _i} - \bar{\eta })}^3}}}{{\eta _{rms}^3}},\end{equation}
\begin{equation}{\mu _4} = \frac{{Ex{{({\eta _i} - \bar{\eta })}^4}}}{{\eta _{rms}^4}},\quad {\mu _3} = \frac{{Ex{{({\eta _i} - \bar{\eta })}^3}}}{{\eta _{rms}^3}},\end{equation}
where  $Ex$ represents expected value, i represents the index number of the data sample,
$Ex$ represents expected value, i represents the index number of the data sample,  $\bar{\eta }$ is the mean value and
$\bar{\eta }$ is the mean value and  ${\eta _{rms}}$ is the root mean square value of
${\eta _{rms}}$ is the root mean square value of  $\eta $. For a wave train in a Gaussian process (i.e. linear random waves),
$\eta $. For a wave train in a Gaussian process (i.e. linear random waves),  ${\mu _4} = 3$ and
${\mu _4} = 3$ and  ${\mu _3} = 0$. The theoretical value of
${\mu _3} = 0$. The theoretical value of  ${\mu _4}$ can be changed with different nonlinear processes or hypotheses. For a narrowband second-order nonlinear wave train, the Stokes wave model gives the contribution from bound waves (Longuet-Higgins Reference Longuet-Higgins1963). Thus, the values of
${\mu _4}$ can be changed with different nonlinear processes or hypotheses. For a narrowband second-order nonlinear wave train, the Stokes wave model gives the contribution from bound waves (Longuet-Higgins Reference Longuet-Higgins1963). Thus, the values of  ${\mu _4}$ and
${\mu _4}$ and  ${\mu _3}$ of an estimated inbound wave (marked as
${\mu _3}$ of an estimated inbound wave (marked as  $\mu _4^b$,
$\mu _4^b$,  $\mu _3^b$) are related to the wave steepness
$\mu _3^b$) are related to the wave steepness  $\varepsilon $
$\varepsilon $
 \begin{equation}\mu _4^b = 3 + 24{\varepsilon ^2},\quad \mu _3^b = 3\varepsilon .\end{equation}
\begin{equation}\mu _4^b = 3 + 24{\varepsilon ^2},\quad \mu _3^b = 3\varepsilon .\end{equation}
In Janssen (Reference Janssen2003) and Mori & Janssen (Reference Mori and Janssen2006),  ${\mu _4}$ (marked as
${\mu _4}$ (marked as  $\mu _4^\ast $) can change the quasi-resonant and non-resonant interactions in (2.21). It is parameterized by the fourth-order cumulant
$\mu _4^\ast $) can change the quasi-resonant and non-resonant interactions in (2.21). It is parameterized by the fourth-order cumulant  ${\kappa _{40}}$, which is proportional to the square of BFI defined by Janssen (Reference Janssen2003)
${\kappa _{40}}$, which is proportional to the square of BFI defined by Janssen (Reference Janssen2003)
 \begin{equation}\mu _4^\ast= {\kappa _{40}} + 3,\quad {\kappa _{40}} = \frac{\rm \pi}{{\sqrt 3 }}BF{I^2}.\end{equation}
\begin{equation}\mu _4^\ast= {\kappa _{40}} + 3,\quad {\kappa _{40}} = \frac{\rm \pi}{{\sqrt 3 }}BF{I^2}.\end{equation}
Based on the contribution from the quasi-resonant four-wave interactions in (2.22) to wave height H, Mori & Janssen (Reference Mori and Janssen2006) gave the exceeding probability  $P(H)$
$P(H)$
 \begin{equation}P(H) = {\textrm{e}^{ - {H^2}/8}}\left[ {1 + \frac{{{\kappa_{40}}}}{{384}}({H^4} - 16{H^2})} \right],\end{equation}
\begin{equation}P(H) = {\textrm{e}^{ - {H^2}/8}}\left[ {1 + \frac{{{\kappa_{40}}}}{{384}}({H^4} - 16{H^2})} \right],\end{equation}
and exceeding probability  ${P_m}({H_{max}})$ of maximum wave height
${P_m}({H_{max}})$ of maximum wave height  ${H_{max}}$
${H_{max}}$
 \begin{equation}{P_m}({H_{max}}) = 1 - \exp \left\{ { - {N_0}\,{\textrm{e}^{ - H_{max}^2/8}}\left[ {1 + \frac{{{\kappa_{40}}}}{{384}}(H_{max}^4 - 16H_{max}^2)} \right]} \right\},\end{equation}
\begin{equation}{P_m}({H_{max}}) = 1 - \exp \left\{ { - {N_0}\,{\textrm{e}^{ - H_{max}^2/8}}\left[ {1 + \frac{{{\kappa_{40}}}}{{384}}(H_{max}^4 - 16H_{max}^2)} \right]} \right\},\end{equation}
where  ${N_0}$ represents the number of waves in a wave train. Equation (2.24) is well validated by
${N_0}$ represents the number of waves in a wave train. Equation (2.24) is well validated by  ${\mu _4}$ in wave tank experiments from Mori et al. (Reference Mori, Onorato, Janssen, Osborne and Serio2007) and Kashima & Mori (Reference Kashima and Mori2019). With the consideration of the directional effect, Mori et al. (Reference Mori, Onorato and Janssen2011) gave the estimation of maximum
${\mu _4}$ in wave tank experiments from Mori et al. (Reference Mori, Onorato, Janssen, Osborne and Serio2007) and Kashima & Mori (Reference Kashima and Mori2019). With the consideration of the directional effect, Mori et al. (Reference Mori, Onorato and Janssen2011) gave the estimation of maximum  ${\kappa _{40}}$ with the directional spread
${\kappa _{40}}$ with the directional spread  ${\sigma _\theta }$ by
${\sigma _\theta }$ by
 \begin{equation}{\kappa _{40}} = \frac{\rm \pi}{{\sqrt 3 }}BF{I^2}\left( {\frac{\alpha }{{{\sigma_\theta }}}} \right),\end{equation}
\begin{equation}{\kappa _{40}} = \frac{\rm \pi}{{\sqrt 3 }}BF{I^2}\left( {\frac{\alpha }{{{\sigma_\theta }}}} \right),\end{equation}
where  $\alpha $ is an empirical coefficient, and
$\alpha $ is an empirical coefficient, and  $\alpha = 0.0276$ from their asymptotic analysis in Monte Carlo simulation.
$\alpha = 0.0276$ from their asymptotic analysis in Monte Carlo simulation.
3. Numerical results
3.1. Model set-up
With the 2-D Gaussian shape directional spectrum in (2.17) and inverse Fourier transform, we give the initial envelope  $\bar{A}(\tau ,{\xi _0},\zeta )$ in the matrix of time series and the spatial distribution in the lateral direction. As a pseudo-spectral method, discrete Fourier transform requires a sufficient length of the target variable to ensure the result has enough information in the evolution. On the other hand, Fourier transforms for a 2-D matrix require a large amount of time in calculation compared with the 1-D model, which is a critical problem since we apply the Monte Carlo method simulation.
$\bar{A}(\tau ,{\xi _0},\zeta )$ in the matrix of time series and the spatial distribution in the lateral direction. As a pseudo-spectral method, discrete Fourier transform requires a sufficient length of the target variable to ensure the result has enough information in the evolution. On the other hand, Fourier transforms for a 2-D matrix require a large amount of time in calculation compared with the 1-D model, which is a critical problem since we apply the Monte Carlo method simulation.
From (2.17), the shape of the initial directional spectrum is decided by the dimensionless spread  ${\sigma _\theta }$ and the frequency spectral width
${\sigma _\theta }$ and the frequency spectral width  ${\sigma _\omega }$. In Lyu et al. (Reference Lyu, Mori and Kashima2021), the effect from
${\sigma _\omega }$. In Lyu et al. (Reference Lyu, Mori and Kashima2021), the effect from  ${\sigma _\omega }$ has been discussed from the unidirectional wave train with different initial BFI. For a 2-D wavefield, the dimensionless spread
${\sigma _\omega }$ has been discussed from the unidirectional wave train with different initial BFI. For a 2-D wavefield, the dimensionless spread  ${\sigma _\theta }$ in different sea states varies from 0.15 to 0.5 from research on observations and wave age (Banner & Young Reference Banner and Young1994; Ewans Reference Ewans1998; Forristall & Ewans Reference Forristall and Ewans1998). Yuen & Lake (Reference Yuen and Lake1982) indicated a limitation of the 2-D NLS-like wave model such that the instability of the wave train continually increases in a certain interval, which reflects in our numerical model that the result cannot reach convergence in Monte Carlo simulation when
${\sigma _\theta }$ in different sea states varies from 0.15 to 0.5 from research on observations and wave age (Banner & Young Reference Banner and Young1994; Ewans Reference Ewans1998; Forristall & Ewans Reference Forristall and Ewans1998). Yuen & Lake (Reference Yuen and Lake1982) indicated a limitation of the 2-D NLS-like wave model such that the instability of the wave train continually increases in a certain interval, which reflects in our numerical model that the result cannot reach convergence in Monte Carlo simulation when  ${\sigma _\theta } \le 0.25$. Therefore, we set the
${\sigma _\theta } \le 0.25$. Therefore, we set the  ${\sigma _\theta } = 0.3$, 0.4, 0.5 in the following comparison for different directional spreadings.
${\sigma _\theta } = 0.3$, 0.4, 0.5 in the following comparison for different directional spreadings.
To ensure the accuracy and computational efficiency, we make the calculation step constant at  $\textrm{d}\xi = 2 \times {10^{ - 5}}{L_0}$, where
$\textrm{d}\xi = 2 \times {10^{ - 5}}{L_0}$, where  ${L_0}$ is carrier wavelength. For the initial condition, carrier angular frequency
${L_0}$ is carrier wavelength. For the initial condition, carrier angular frequency  $\omega = 2.5\;{\textrm{s}^{ - 1}}$, sampling time
$\omega = 2.5\;{\textrm{s}^{ - 1}}$, sampling time  $\textrm{d}t = 0.1\;\textrm{s}$, time length
$\textrm{d}t = 0.1\;\textrm{s}$, time length  ${L_T} = 40{T_0}$, where
${L_T} = 40{T_0}$, where  ${T_0}$ is wave period, and carrier lateral wavenumber
${T_0}$ is wave period, and carrier lateral wavenumber  ${k_{\zeta 0}} = 0$, sampling distance
${k_{\zeta 0}} = 0$, sampling distance  ${d_y} = 0.5{L_0}$. To ensure that the initial condition given by (2.17) converges to a Gaussian process, we generate the initial Fourier amplitude by a sufficiently large number
${d_y} = 0.5{L_0}$. To ensure that the initial condition given by (2.17) converges to a Gaussian process, we generate the initial Fourier amplitude by a sufficiently large number  $(N = {L_T}/\textrm{d}t = 1000)$ of component waves with different frequencies
$(N = {L_T}/\textrm{d}t = 1000)$ of component waves with different frequencies  ${\omega _\tau }$ uniformly distributed around the carrier frequency. The kurtosis
${\omega _\tau }$ uniformly distributed around the carrier frequency. The kurtosis  ${\mu _4}$ and skewness
${\mu _4}$ and skewness  ${\mu _3}$ of the initial surface elevation
${\mu _3}$ of the initial surface elevation  $\eta ({x_0},y,t)$ satisfy the Gaussian distribution such that
$\eta ({x_0},y,t)$ satisfy the Gaussian distribution such that  ${\mu _4} = 3$ and
${\mu _4} = 3$ and  ${\mu _3} = 0$. The initial water depth starts at a medium depth
${\mu _3} = 0$. The initial water depth starts at a medium depth  $kh = 5$, wave steepness
$kh = 5$, wave steepness  $\varepsilon = 0.1$. The width of the 2-D computational domain
$\varepsilon = 0.1$. The width of the 2-D computational domain  ${L_y} = 30{L_0}$ to reflect the propagation of directional waves (the analysis and discussion to decide the appropriate set of
${L_y} = 30{L_0}$ to reflect the propagation of directional waves (the analysis and discussion to decide the appropriate set of  ${d_y}$ and
${d_y}$ and  ${L_y}$ is given in the supplementary materials available at https://doi.org/10.1017/jfm.2023.73). For different forms of bottom topography, the length of the computational domain in the principal direction varies from
${L_y}$ is given in the supplementary materials available at https://doi.org/10.1017/jfm.2023.73). For different forms of bottom topography, the length of the computational domain in the principal direction varies from  $30{L_0}$ to
$30{L_0}$ to  $150{L_0}$, and the calculation stops at the shallow water
$150{L_0}$, and the calculation stops at the shallow water  $kh = 1.1$, where wave steepness
$kh = 1.1$, where wave steepness  $\varepsilon = 0.1343$. This study assumes the water surface basically maintains the form of a mechanical wave in the evolution, so the wave-breaking case is not taken into consideration. Therefore, our simulation stops before the wave steepness reaches the threshold value of breaking in very shallow water.
$\varepsilon = 0.1343$. This study assumes the water surface basically maintains the form of a mechanical wave in the evolution, so the wave-breaking case is not taken into consideration. Therefore, our simulation stops before the wave steepness reaches the threshold value of breaking in very shallow water.
Mei & Benmoussa (Reference Mei and Benmoussa1984) introduced a normalization to make all parameters dimensionless in the realization process. We apply a different normalization for the variable  $(\bar{A},\xi ,\zeta ,{k_\zeta },{\omega _\tau },\tau )$ in programming as follows:
$(\bar{A},\xi ,\zeta ,{k_\zeta },{\omega _\tau },\tau )$ in programming as follows:
 \begin{gather}A^{\prime} = \frac{{2{\rm \pi}}}{{{L_0}}}\bar{A},\quad \xi ^{\prime} = \frac{{2{\rm \pi}}}{{{L_0}}}\xi ,\quad \zeta ^{\prime} = \frac{{2{\rm \pi}}}{{\varepsilon {L_y}}}\zeta ,\end{gather}
\begin{gather}A^{\prime} = \frac{{2{\rm \pi}}}{{{L_0}}}\bar{A},\quad \xi ^{\prime} = \frac{{2{\rm \pi}}}{{{L_0}}}\xi ,\quad \zeta ^{\prime} = \frac{{2{\rm \pi}}}{{\varepsilon {L_y}}}\zeta ,\end{gather} \begin{gather}{k^{\prime}_\zeta } = \varepsilon \frac{{{L_y}}}{{2{\rm \pi}}}{k_\zeta },\quad \omega ^{\prime} = \varepsilon \frac{{{L_T}}}{{2{\rm \pi} }}{\omega _\tau },\quad \tau ^{\prime} = \frac{{2{\rm \pi}}}{{\varepsilon {L_T}}}\tau .\end{gather}
\begin{gather}{k^{\prime}_\zeta } = \varepsilon \frac{{{L_y}}}{{2{\rm \pi}}}{k_\zeta },\quad \omega ^{\prime} = \varepsilon \frac{{{L_T}}}{{2{\rm \pi} }}{\omega _\tau },\quad \tau ^{\prime} = \frac{{2{\rm \pi}}}{{\varepsilon {L_T}}}\tau .\end{gather}3.2. Evolution of modulated wave over flat bottoms
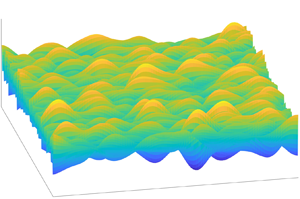
Firstly, we consider the wave evolution over a flat bottom to investigate the effect of initial conditions as reference runs for uneven bottom cases. If we set  ${\beta _h} = 0$, (2.13) is equivalent to the 2-D NLS equation in Davey & Stewartson (Reference Davey and Stewartson1974), and the evolution process is constructed by a spatial step in the principal wave direction. The surface elevation is given in discrete 2-D + T form. In figure 2, we give the transient surface elevation
${\beta _h} = 0$, (2.13) is equivalent to the 2-D NLS equation in Davey & Stewartson (Reference Davey and Stewartson1974), and the evolution process is constructed by a spatial step in the principal wave direction. The surface elevation is given in discrete 2-D + T form. In figure 2, we give the transient surface elevation  $\eta $ at
$\eta $ at  $t = 40{T_0}$ from three random samples with different directional spreads
$t = 40{T_0}$ from three random samples with different directional spreads  ${\sigma _\theta }$ and the initial BFI = 1
${\sigma _\theta }$ and the initial BFI = 1  $({\sigma _s} = 0.14)$ at water depth
$({\sigma _s} = 0.14)$ at water depth  $kh = 5$. The viewing angle is vertical to the horizontal plane, and we use the colour gradient to represent the elevation. The 2-D irregular waves propagate from the left to the right side, and we can figure out the multi-directions from the wavefront lines. As
$kh = 5$. The viewing angle is vertical to the horizontal plane, and we use the colour gradient to represent the elevation. The 2-D irregular waves propagate from the left to the right side, and we can figure out the multi-directions from the wavefront lines. As  ${\sigma _\theta }$ increases from 0.3 to 0.5, the propagation becomes more divergent in different directions, which makes the wavefront appear to be more discontinuous.
${\sigma _\theta }$ increases from 0.3 to 0.5, the propagation becomes more divergent in different directions, which makes the wavefront appear to be more discontinuous.

Figure 2. Transient surface elevation  $\eta $ at
$\eta $ at  $t = 40{T_0}$ from different directional spreads
$t = 40{T_0}$ from different directional spreads  ${\sigma _\theta }$ with initial BFI = 1,
${\sigma _\theta }$ with initial BFI = 1,  $kh = 5$. (a)
$kh = 5$. (a)  ${\sigma _\theta } = 0.3$, (b)
${\sigma _\theta } = 0.3$, (b)  ${\sigma _\theta } = 0.4$ and (c)
${\sigma _\theta } = 0.4$ and (c)  ${\sigma _\theta } = 0.5$.
${\sigma _\theta } = 0.5$.
The initial condition with a random phase in (2.17) helps generate an irregular wave train, and a Monte Carlo simulation is conducted. For a domain in strict-sense stationary (SSS), the statistical properties remain invariant to any shift at any order, and the surface elevation for a 2-D irregular wave at a fixed point will be generally closed to a zero-mean SSS process when the Monte Carlo simulation for random wave phase has enough ensemble size. In this study, we set the ensemble size to 300 and give the average value of kurtosis  ${\mu _4}$ and skewness
${\mu _4}$ and skewness  ${\mu _3}$ in time series to each space node. The deciding process of the ensemble size is also discussed in the supplementary materials.
${\mu _3}$ in time series to each space node. The deciding process of the ensemble size is also discussed in the supplementary materials.
The result in 2-D form can be modified into 1-D form by being averaged again in one space dimension because the statistical significance is uniformly distributed in this 2-D domain. To show the wave evolution process, we take the averaged value on the lateral direction of the principal wave direction and give the Monte Carlo result of the unidirectional wave train and the 2-D wavefield with initial BFI = 0.5  $({\sigma _s} = 0.28)$ for a flat bottom
$({\sigma _s} = 0.28)$ for a flat bottom  $kh = 7$ to discuss the effect from the directional spread
$kh = 7$ to discuss the effect from the directional spread  ${\sigma _\theta }$ in figure 3. The result in the unidirectional wave train can be regarded as
${\sigma _\theta }$ in figure 3. The result in the unidirectional wave train can be regarded as  ${\sigma _\theta } = 0$. As
${\sigma _\theta } = 0$. As  ${\sigma _\theta }$ increases, both kurtosis
${\sigma _\theta }$ increases, both kurtosis  ${\mu _4}$ and skewness
${\mu _4}$ and skewness  ${\mu _3}$ decrease, which implies the increase of directional spreading disperses the nonlinear interactions in the wave train.
${\mu _3}$ decrease, which implies the increase of directional spreading disperses the nonlinear interactions in the wave train.

Figure 3. Spatial evolution of kurtosis  ${\mu _4}$ and skewness
${\mu _4}$ and skewness  ${\mu _3}$ of surface elevation from directional spread
${\mu _3}$ of surface elevation from directional spread  ${\sigma _\theta }$ with initial BFI = 0.5,
${\sigma _\theta }$ with initial BFI = 0.5,  $kh = 7$ (1-D
$kh = 7$ (1-D  $({\sigma _\theta } = 0)$, blue; 2-D: red,
$({\sigma _\theta } = 0)$, blue; 2-D: red,  ${\sigma _\theta } = 0.3$; yellow,
${\sigma _\theta } = 0.3$; yellow,  ${\sigma _\theta } = 0.4$; black,
${\sigma _\theta } = 0.4$; black,  ${\sigma _\theta } = 0.5$). (a) Kurtosis
${\sigma _\theta } = 0.5$). (a) Kurtosis  ${\mu _4}$ and (b) skewness
${\mu _4}$ and (b) skewness  ${\mu _3}$.
${\mu _3}$.
For the 2-D propagation in a directional wavefield, both short-time and long-time behaviour of  ${\kappa _{40}}$ for a narrowband wave train is related to the directional width and a frequency width (Janssen & Bidlot Reference Janssen and Bidlot2009). We are also interested in the kurtosis distribution at the intermediate stages in freak wave forecasting. Mori et al. (Reference Mori, Onorato and Janssen2011) conducted an asymptotic analysis of
${\kappa _{40}}$ for a narrowband wave train is related to the directional width and a frequency width (Janssen & Bidlot Reference Janssen and Bidlot2009). We are also interested in the kurtosis distribution at the intermediate stages in freak wave forecasting. Mori et al. (Reference Mori, Onorato and Janssen2011) conducted an asymptotic analysis of  ${\kappa _{40}}$, BFI and
${\kappa _{40}}$, BFI and  ${\sigma _\theta }$ by numerical simulation, and gave (2.25) with empirical coefficient
${\sigma _\theta }$ by numerical simulation, and gave (2.25) with empirical coefficient  $\alpha $. Table 1 shows the ensemble-averaged result of the expected maximum
$\alpha $. Table 1 shows the ensemble-averaged result of the expected maximum  ${\kappa _{40}}$ and mean
${\kappa _{40}}$ and mean  ${\kappa _{40}}$ at
${\kappa _{40}}$ at  $x \in [20{L_0},30{L_0}]$ from Monte Carlo simulation of the wave model in this study, and gives the empirical coefficients
$x \in [20{L_0},30{L_0}]$ from Monte Carlo simulation of the wave model in this study, and gives the empirical coefficients  ${\alpha _{max}}$ and
${\alpha _{max}}$ and  ${\alpha _{mean}}$ by (2.25) for maximum
${\alpha _{mean}}$ by (2.25) for maximum  ${\kappa _{40}}$ and mean
${\kappa _{40}}$ and mean  ${\kappa _{40}}$, respectively. Due to different calculation conditions, we give different empirical coefficients from Mori et al. (Reference Mori, Onorato and Janssen2011)
${\kappa _{40}}$, respectively. Due to different calculation conditions, we give different empirical coefficients from Mori et al. (Reference Mori, Onorato and Janssen2011)  $(\alpha = 0.0276)$, and the expected maximum
$(\alpha = 0.0276)$, and the expected maximum  ${\kappa _{40}}$ is significantly larger than their prediction. Nevertheless, the result from
${\kappa _{40}}$ is significantly larger than their prediction. Nevertheless, the result from  $kh = 7$ shows that the increase of
$kh = 7$ shows that the increase of  ${\sigma _\theta }$ and the decrease of BFI lead to the decrease of both maximum and mean
${\sigma _\theta }$ and the decrease of BFI lead to the decrease of both maximum and mean  ${\kappa _{40}}$, but the change in empirical coefficient
${\kappa _{40}}$, but the change in empirical coefficient  $\alpha $ represents that
$\alpha $ represents that  ${\kappa _{40}}$ is not strictly inversely proportional to
${\kappa _{40}}$ is not strictly inversely proportional to  ${\sigma _\theta }$ as in (2.25), and the case from different initial BFI will ask for a different
${\sigma _\theta }$ as in (2.25), and the case from different initial BFI will ask for a different  $\alpha $. The value of
$\alpha $. The value of  ${\alpha _{mean}}$ for mean
${\alpha _{mean}}$ for mean  ${\kappa _{40}}$ at
${\kappa _{40}}$ at  $kh = 7$ is better than
$kh = 7$ is better than  ${\alpha _{max}}$ to describe the kurtosis of the wavefield, and its value is around 0.09~0.14. When the water depth becomes shallow (
${\alpha _{max}}$ to describe the kurtosis of the wavefield, and its value is around 0.09~0.14. When the water depth becomes shallow ( $kh = 5$, 3, 1.1), (2.25) is no longer applicable and
$kh = 5$, 3, 1.1), (2.25) is no longer applicable and  ${\alpha _{mean}}$ and
${\alpha _{mean}}$ and  ${\alpha _{max}}$ significantly decrease. For
${\alpha _{max}}$ significantly decrease. For  $kh = 1.1$, the increase of
$kh = 1.1$, the increase of  ${\sigma _\theta }$ leads to the increase of
${\sigma _\theta }$ leads to the increase of  ${\kappa _{40}}$ and
${\kappa _{40}}$ and  ${\alpha _{mean}}$, which seems anomalous. The behaviour of
${\alpha _{mean}}$, which seems anomalous. The behaviour of  ${\kappa _{40}}$ further indicates that the occurrence of extreme wave height in medium and shallow water cannot only be predicted by the four-wave interaction as in deep water. The contribution from water depth becomes important, especially in shallow water, and the simulation over a changing depth may reveal this process more effectively.
${\kappa _{40}}$ further indicates that the occurrence of extreme wave height in medium and shallow water cannot only be predicted by the four-wave interaction as in deep water. The contribution from water depth becomes important, especially in shallow water, and the simulation over a changing depth may reveal this process more effectively.
Table 1. The ensemble-averaged  ${\kappa _{40}}$ dependence on BFI and
${\kappa _{40}}$ dependence on BFI and  ${\sigma _\theta }$ at different
${\sigma _\theta }$ at different  $kh$.
$kh$.

3.3. Evolution of modulated wave over uneven bottoms
This section considers Monte Carlo simulation of the 2-D wave model for uneven bottoms. The variation in the bottom topography brings about the spatial inhomogeneity in the dispersion, which reflects in both second-order and third-order effects. Our numerical model by (2.13) assumes the depth mildly changes in the principal wave direction, and the bottom topography does not vary in its lateral direction. Therefore, the statistical properties remain stationary on the y-axis but vary on the x-axis.
As a simulation of the bottom topography from offshore to onshore, we set the depth to slowly decrease from a medium-water depth to shallow water. In previous research (e.g. Kashima & Mori Reference Kashima and Mori2019; Li et al. Reference Li, Draycott, Zheng, Lin, Adcock and Bremer2021; Lyu et al. Reference Lyu, Mori and Kashima2021), the abrupt change in depth or slope led to significant local peaks in  ${\mu _3}$ and
${\mu _3}$ and  ${\mu _4}$ due to the after effect. Usually, the water depth decreases in a smoother way in the natural seabed. On the other hand, the local peak caused by this unusual topography is so significant that it may cover the difference caused by the directional effect. To make our simulation closer to the natural seabed, we adjust the sloping region in figure 1 between A and B to become smoother and to continuously decrease, as shown in figure 4. The sloping region is divided into two parts by the dividing line C at
${\mu _4}$ due to the after effect. Usually, the water depth decreases in a smoother way in the natural seabed. On the other hand, the local peak caused by this unusual topography is so significant that it may cover the difference caused by the directional effect. To make our simulation closer to the natural seabed, we adjust the sloping region in figure 1 between A and B to become smoother and to continuously decrease, as shown in figure 4. The sloping region is divided into two parts by the dividing line C at  $kh = 1.2$: the depth linearly decreases with a slope
$kh = 1.2$: the depth linearly decreases with a slope  ${\gamma _s}$ from
${\gamma _s}$ from  $kh = 5$ to
$kh = 5$ to  $kh = 1.2$; the depth decreases with a decaying slope
$kh = 1.2$; the depth decreases with a decaying slope  ${\gamma ^{\prime}_s} = {\gamma _s}{(h/1.55)^{40}}$ from
${\gamma ^{\prime}_s} = {\gamma _s}{(h/1.55)^{40}}$ from  $kh = 1.2$ to
$kh = 1.2$ to  $kh = 1.1$. In the shallow-water area, the derivative of the decreasing depth is approximately continuous, and we set
$kh = 1.1$. In the shallow-water area, the derivative of the decreasing depth is approximately continuous, and we set  ${\gamma _s} = 0.05$, 0.02, 0.01 to ensure the depth changes very mildly under the assumption
${\gamma _s} = 0.05$, 0.02, 0.01 to ensure the depth changes very mildly under the assumption  $h^{\prime}(x)\sim O({\varepsilon ^2})$.
$h^{\prime}(x)\sim O({\varepsilon ^2})$.

Figure 4. The variation of water depth  $kh$ on the bottom topography with
$kh$ on the bottom topography with  ${\gamma _s} = 0.02$.
${\gamma _s} = 0.02$.
Figures 5 and 6 shows the averaged values of kurtosis and skewness from the Monte Carlo simulation of the bottom type in figure 4. In figure 5, we give the averaged kurtosis  ${\mu _4}$ in 2-D form at the different directional spread
${\mu _4}$ in 2-D form at the different directional spread  ${\sigma _\theta }$ and slope angle
${\sigma _\theta }$ and slope angle  ${\gamma _s}$ with initial BFI = 0.4
${\gamma _s}$ with initial BFI = 0.4  $({\sigma _s} = 0.35)$. Comparing the result from different
$({\sigma _s} = 0.35)$. Comparing the result from different  ${\sigma _\theta }$ in figure 5(a–c), we find that
${\sigma _\theta }$ in figure 5(a–c), we find that  ${\mu _4}$ decreases in the deep-water depth but increases in the shallow water when the initial directional spreading
${\mu _4}$ decreases in the deep-water depth but increases in the shallow water when the initial directional spreading  ${\sigma _\theta }$ increases from 0.3 to 0.5, which shows that the same phenomenon results in a flat bottom in § 3.1. In the medium-water depth region between locations A and C,
${\sigma _\theta }$ increases from 0.3 to 0.5, which shows that the same phenomenon results in a flat bottom in § 3.1. In the medium-water depth region between locations A and C,  ${\mu _4}$ decreases with the decrease of water depth, and it rebounds at the end of the constant sloping region (location C) where
${\mu _4}$ decreases with the decrease of water depth, and it rebounds at the end of the constant sloping region (location C) where  $kh = 1.2$. In the region between C and B, where the slope angle mildly decreases,
$kh = 1.2$. In the region between C and B, where the slope angle mildly decreases,  ${\mu _4}$ decreases and becomes stable at the same level as the final flat bottom in shallow water
${\mu _4}$ decreases and becomes stable at the same level as the final flat bottom in shallow water  $kh = 1.1$. The evolution of
$kh = 1.1$. The evolution of  ${\mu _4}$ indicates that the directional dispersion effect decreases the occurrence probability of freak waves in deep and medium water but increases it in shallow water. As the wave propagates from the medium water to shallow water, the wave evolution is significantly affected by the bottom topography, and the 1-D result in figure 5(d) clearly gives the rebound of
${\mu _4}$ indicates that the directional dispersion effect decreases the occurrence probability of freak waves in deep and medium water but increases it in shallow water. As the wave propagates from the medium water to shallow water, the wave evolution is significantly affected by the bottom topography, and the 1-D result in figure 5(d) clearly gives the rebound of  ${\mu _4}$ due to the slope angle. To further study the effect from the bottom topography, we give the mean
${\mu _4}$ due to the slope angle. To further study the effect from the bottom topography, we give the mean  ${\mu _4}$ at
${\mu _4}$ at  ${\gamma _s} = 0.02$ and
${\gamma _s} = 0.02$ and  ${\gamma _s} = 0.01$ with initial BFI = 0.4 and
${\gamma _s} = 0.01$ with initial BFI = 0.4 and  ${\sigma _\theta } = 0.3$ in figures 5(e) and 5( f). The result shows that the rebound of
${\sigma _\theta } = 0.3$ in figures 5(e) and 5( f). The result shows that the rebound of  ${\mu _4}$ decreases as the bottom change become milder, and figure 5(g) provides the variation of
${\mu _4}$ decreases as the bottom change become milder, and figure 5(g) provides the variation of  ${\mu _4}$ in the principal wave direction in one dimension. Comparing
${\mu _4}$ in the principal wave direction in one dimension. Comparing  ${\mu _4}$ over uneven bottoms between the unidirectional wave train and the 2-D wavefield, we find the slope angle similarly affects the wave evolution. However, its contribution is more significant in two dimensions due to the dispersion effect in the four-wave interaction, which implies the second-order effect plays a more important role in a directional 2-D wavefield.
${\mu _4}$ over uneven bottoms between the unidirectional wave train and the 2-D wavefield, we find the slope angle similarly affects the wave evolution. However, its contribution is more significant in two dimensions due to the dispersion effect in the four-wave interaction, which implies the second-order effect plays a more important role in a directional 2-D wavefield.

Figure 5. Mean kurtosis of surface elevation  $\eta $ for uneven bottoms at different directional spreads
$\eta $ for uneven bottoms at different directional spreads  ${\sigma _\theta }$ and slope angles
${\sigma _\theta }$ and slope angles  ${\gamma _s}$ with initial BFI = 0.4 (blue,
${\gamma _s}$ with initial BFI = 0.4 (blue,  ${\sigma _\theta } = 0.3$; red,
${\sigma _\theta } = 0.3$; red,  ${\sigma _\theta } = 0.4$; yellow,
${\sigma _\theta } = 0.4$; yellow,  ${\sigma _\theta } = 0.5$; g: blue,
${\sigma _\theta } = 0.5$; g: blue,  ${\gamma _s} = 0.05$; red,
${\gamma _s} = 0.05$; red,  ${\gamma _s} = 0.02$; yellow,
${\gamma _s} = 0.02$; yellow,  ${\gamma _s} = 0.01$). (a)
${\gamma _s} = 0.01$). (a)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.05$, (b)
${\gamma _s} = 0.05$, (b)  ${\sigma _\theta } = 0.4$,
${\sigma _\theta } = 0.4$,  ${\gamma _s} = 0.05$, (c)
${\gamma _s} = 0.05$, (c)  ${\sigma _\theta } = 0.5$,
${\sigma _\theta } = 0.5$,  ${\gamma _s} = 0.05$, (d)
${\gamma _s} = 0.05$, (d)  ${\sigma _\theta } = 0.3$, 0.4, 0.5,
${\sigma _\theta } = 0.3$, 0.4, 0.5,  ${\gamma _s} = 0.05$, (e)
${\gamma _s} = 0.05$, (e)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.02$, ( f)
${\gamma _s} = 0.02$, ( f)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.01$ and (g)
${\gamma _s} = 0.01$ and (g)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.05$, 0.02, 0.01.
${\gamma _s} = 0.05$, 0.02, 0.01.

Figure 6. Mean skewness of surface elevation  $\eta $ for uneven bottoms at different directional spreads
$\eta $ for uneven bottoms at different directional spreads  ${\sigma _\theta }$ and slope angles
${\sigma _\theta }$ and slope angles  ${\gamma _s}$ with initial BFI = 0.4 (blue,
${\gamma _s}$ with initial BFI = 0.4 (blue,  ${\sigma _\theta } = 0.3$; red,
${\sigma _\theta } = 0.3$; red,  ${\sigma _\theta } = 0.4$; yellow,
${\sigma _\theta } = 0.4$; yellow,  ${\sigma _\theta } = 0.5$; g: blue,
${\sigma _\theta } = 0.5$; g: blue,  ${\gamma _s} = 0.05$; red,
${\gamma _s} = 0.05$; red,  ${\gamma _s} = 0.02$; yellow,
${\gamma _s} = 0.02$; yellow,  ${\gamma _s} = 0.01$). (a)
${\gamma _s} = 0.01$). (a)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.05$, (b)
${\gamma _s} = 0.05$, (b)  ${\sigma _\theta } = 0.4$,
${\sigma _\theta } = 0.4$,  ${\gamma _s} = 0.05$, (c)
${\gamma _s} = 0.05$, (c)  ${\sigma _\theta } = 0.5$,
${\sigma _\theta } = 0.5$,  ${\gamma _s} = 0.05$, (d)
${\gamma _s} = 0.05$, (d)  ${\sigma _\theta } = 0.3$, 0.4, 0.5,
${\sigma _\theta } = 0.3$, 0.4, 0.5,  ${\gamma _s} = 0.05$, (e)
${\gamma _s} = 0.05$, (e)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.02$, ( f)
${\gamma _s} = 0.02$, ( f)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.01$ and (g)
${\gamma _s} = 0.01$ and (g)  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.05$, 0.02, 0.01.
${\gamma _s} = 0.05$, 0.02, 0.01.
In figure 6, we give skewness  ${\mu _3}$ in the same form as
${\mu _3}$ in the same form as  ${\mu _4}$ in figure 5 at the same condition. Different from
${\mu _4}$ in figure 5 at the same condition. Different from  ${\mu _4}$,
${\mu _4}$,  ${\mu _3}$ does not influence directional spread from figure 6(a–d) due to the unchanging second-order nonlinear interaction. When the bottom topography changes, figure 6(e–g) shows that
${\mu _3}$ does not influence directional spread from figure 6(a–d) due to the unchanging second-order nonlinear interaction. When the bottom topography changes, figure 6(e–g) shows that  ${\mu _3}$ increases as the water depth become shallow. This process will slow down if the slope angle becomes mild, but it only means
${\mu _3}$ increases as the water depth become shallow. This process will slow down if the slope angle becomes mild, but it only means  ${\mu _3}$ is determined by the water depth
${\mu _3}$ is determined by the water depth  $kh$ and the change from slope angle
$kh$ and the change from slope angle  ${\gamma _s}$ has little influence. Different from the unidirectional wave train,
${\gamma _s}$ has little influence. Different from the unidirectional wave train,  ${\mu _3}$ in the 2-D wavefield is basically only determined by the variation in dispersion due to depth change, and is hardly affected by the local bathymetry effect. When the wave trains propagate into shallow water,
${\mu _3}$ in the 2-D wavefield is basically only determined by the variation in dispersion due to depth change, and is hardly affected by the local bathymetry effect. When the wave trains propagate into shallow water,  ${\mu _3}$ increases with the increase of wave steepness
${\mu _3}$ increases with the increase of wave steepness  $\varepsilon $.
$\varepsilon $.
3.4. Quantitative analysis of the extreme wave height
In §§ 3.2 and 3.3, the evolutions of the nonlinear resonant interactions have been discussed with the bathymetry effect at different water depths. Parameters  ${\mu _4}$ and
${\mu _4}$ and  ${\mu _3}$ represent different nonlinear mechanisms, and they show different characteristics on the directional wavefield over an uneven bottom. However, the final result of the occurrence of extreme wave height is their combined effect, and we cannot simply give the estimation until giving a quantitative analysis of the distribution of surface elevation
${\mu _3}$ represent different nonlinear mechanisms, and they show different characteristics on the directional wavefield over an uneven bottom. However, the final result of the occurrence of extreme wave height is their combined effect, and we cannot simply give the estimation until giving a quantitative analysis of the distribution of surface elevation  $\eta $.
$\eta $.
In figure 7, we give the expected maximum wave height  ${H_{max}}$ and maximum wave crest
${H_{max}}$ and maximum wave crest  ${\eta _{max}}$ in the principal wave direction. In the same form as
${\eta _{max}}$ in the principal wave direction. In the same form as  ${\mu _4}$ and
${\mu _4}$ and  ${\mu _3}$ in figures 5 and 6,
${\mu _3}$ in figures 5 and 6,  ${H_{max}}$ and
${H_{max}}$ and  ${\eta _{max}}$ are counted from the time series sampling data at a fixed point in the 2-D wavefield, and their ensemble-averaged value is given by Monte Carlo simulation. We make the wave height dimensionless by taking
${\eta _{max}}$ are counted from the time series sampling data at a fixed point in the 2-D wavefield, and their ensemble-averaged value is given by Monte Carlo simulation. We make the wave height dimensionless by taking  ${H_{max}}/{\eta _{rms}}$ and
${H_{max}}/{\eta _{rms}}$ and  ${\eta _{max}}/{\eta _{rms}}$, and continue to write them as
${\eta _{max}}/{\eta _{rms}}$, and continue to write them as  ${H_{max}}$ and
${H_{max}}$ and  ${\eta _{max}}$ for convenience. The result contains the wave train with different directional spreadings
${\eta _{max}}$ for convenience. The result contains the wave train with different directional spreadings  ${\sigma _\theta } = 0.3$, 0.4, 0.5 over the bottom topography
${\sigma _\theta } = 0.3$, 0.4, 0.5 over the bottom topography  ${\gamma _s} = 0.05$, 0.02, 0.01, and the theoretical result from the linear model (Rayleigh distribution) and the numerical result from the second-order bound wave model in
${\gamma _s} = 0.05$, 0.02, 0.01, and the theoretical result from the linear model (Rayleigh distribution) and the numerical result from the second-order bound wave model in  ${\sigma _\theta } = 0.3$,
${\sigma _\theta } = 0.3$,  ${\gamma _s} = 0.05$ are given for comparison. The Rayleigh distribution can be referred to as the standard linear narrow-banded wave theory in Goda (Reference Goda1970, Reference Goda2000), in which the wave height H follows the Gaussian distribution and the exceeding probability
${\gamma _s} = 0.05$ are given for comparison. The Rayleigh distribution can be referred to as the standard linear narrow-banded wave theory in Goda (Reference Goda1970, Reference Goda2000), in which the wave height H follows the Gaussian distribution and the exceeding probability  ${P_m}({H_{max}})$ follows
${P_m}({H_{max}})$ follows
 \begin{equation}{P_m}({H_{max}}) = 1 - \exp ( - {N_0}\,{\textrm{e}^{ - H_{max}^2/8}}),\end{equation}
\begin{equation}{P_m}({H_{max}}) = 1 - \exp ( - {N_0}\,{\textrm{e}^{ - H_{max}^2/8}}),\end{equation}
where the number of waves  ${N_0} = 40$ in our simulation. From deep water to shallow,
${N_0} = 40$ in our simulation. From deep water to shallow,  ${H_{max}}$ in 2-D model monotonically decreases with the water depth in comparison with the second-order model. Similar with
${H_{max}}$ in 2-D model monotonically decreases with the water depth in comparison with the second-order model. Similar with  ${\mu _4}$, the peak of
${\mu _4}$, the peak of  ${H_{max}}$ is suppressed by the increase of
${H_{max}}$ is suppressed by the increase of  ${\sigma _\theta }$ in deep water but is enhanced in shallow water. However, there is no significant change in the slope. In figure 7(b), the
${\sigma _\theta }$ in deep water but is enhanced in shallow water. However, there is no significant change in the slope. In figure 7(b), the  ${\eta _{max}}$ significantly increases in shallow water, and the local peak reflects the contribution from the slope. Even when the bottom changes in a relatively continuous process, this local peak still occurs, and is consistent with the variation of
${\eta _{max}}$ significantly increases in shallow water, and the local peak reflects the contribution from the slope. Even when the bottom changes in a relatively continuous process, this local peak still occurs, and is consistent with the variation of  ${\mu _4}$. Different from
${\mu _4}$. Different from  ${H_{max}}$ in shallow water, the increase of
${H_{max}}$ in shallow water, the increase of  ${\eta _{max}}$ is related to
${\eta _{max}}$ is related to  ${\mu _3}$, in keeping with the general deformation of waves in the shoaling process. In the Rayleigh distribution,
${\mu _3}$, in keeping with the general deformation of waves in the shoaling process. In the Rayleigh distribution,  ${H_{max}}$ and
${H_{max}}$ and  ${\eta _{max}}$ are independent of the bathymetry. The linear model underestimates
${\eta _{max}}$ are independent of the bathymetry. The linear model underestimates  ${H_{max}}$ in deep water and overestimates it in the shallow water, and significantly underestimates
${H_{max}}$ in deep water and overestimates it in the shallow water, and significantly underestimates  ${\eta _{max}}$. As a result of the second-order bound wave model,
${\eta _{max}}$. As a result of the second-order bound wave model,  ${H_{max}}$ is hardly affected by the bottom topography and
${H_{max}}$ is hardly affected by the bottom topography and  ${\eta _{max}}$ is determined by wave steepness. Comparing different models, the present model provides more consideration of the different effects of the four-wave interaction at various depths. Comparing the result in figures 5–7, we find the rebound of
${\eta _{max}}$ is determined by wave steepness. Comparing different models, the present model provides more consideration of the different effects of the four-wave interaction at various depths. Comparing the result in figures 5–7, we find the rebound of  ${\mu _4}$ at location C does not reflect in
${\mu _4}$ at location C does not reflect in  ${H_{max}}$ but shows in
${H_{max}}$ but shows in  ${\eta _{max}}$, which implies the wave height distribution at this area is more determined by the topography effect at second order rather than the four-wave interaction at third order.
${\eta _{max}}$, which implies the wave height distribution at this area is more determined by the topography effect at second order rather than the four-wave interaction at third order.

Figure 7. Ensemble-averaged expected maximum wave height and free surface elevation distribution at initial BFI = 0.4 from different  ${\sigma _\theta }$ and
${\sigma _\theta }$ and  ${\gamma _s}$ (present model: black,
${\gamma _s}$ (present model: black,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,  ${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,
${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,  ${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,
${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: dotted,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: dotted,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line). (a) Maximum wave height
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line). (a) Maximum wave height  ${H_{max}}$ and (b) maximum wave crest
${H_{max}}$ and (b) maximum wave crest  ${\eta _{max}}$.
${\eta _{max}}$.
When concentrating on the freak wave problem, only the expected value is insufficient to estimate the extreme case. Therefore, we integrate the distributions of  ${H_{max}}$ and
${H_{max}}$ and  ${\eta _{max}}$ at each section in the principal wave direction. If we follow the common definition of the freak wave as the wave height exceeds the significant wave height by a factor two, then the occurrence probability of a freak wave height is
${\eta _{max}}$ at each section in the principal wave direction. If we follow the common definition of the freak wave as the wave height exceeds the significant wave height by a factor two, then the occurrence probability of a freak wave height is  $P_f(H_{max})$ when
$P_f(H_{max})$ when  ${H_{max}} > 8{\eta _{rms}}$ and the corresponding probability estimated by the wave crest is
${H_{max}} > 8{\eta _{rms}}$ and the corresponding probability estimated by the wave crest is  $P_f(\eta_{max})$ when
$P_f(\eta_{max})$ when  ${\eta _{max}} > 4{\eta _{rms}}$ under the standard linear narrow-banded wave theory from Goda (Reference Goda1970, Reference Goda2000) (f, freak wave). Figure 8 calculates the probabilities as mentioned above and gives the fit curves through the tenth-order polynomial. A little different from figures 5–7, the horizontal axis is set to be the water depth
${\eta _{max}} > 4{\eta _{rms}}$ under the standard linear narrow-banded wave theory from Goda (Reference Goda1970, Reference Goda2000) (f, freak wave). Figure 8 calculates the probabilities as mentioned above and gives the fit curves through the tenth-order polynomial. A little different from figures 5–7, the horizontal axis is set to be the water depth  $kh$ in figure 8, so we can more easily check the effect from different
$kh$ in figure 8, so we can more easily check the effect from different  ${\gamma _s}$ at the same depth. In figure 8(a),
${\gamma _s}$ at the same depth. In figure 8(a),  $P_f(H_{max})$ monotonically decreases with the water depth as expected
$P_f(H_{max})$ monotonically decreases with the water depth as expected  ${H_{max}}$, but more details can be given: in relatively deep water such as
${H_{max}}$, but more details can be given: in relatively deep water such as  $kh > 4$, the convergence of
$kh > 4$, the convergence of  $P_f(H_{max})$ becomes worse, which implies the variance of surface elevation significantly rises; for the shallow water
$P_f(H_{max})$ becomes worse, which implies the variance of surface elevation significantly rises; for the shallow water  $kh < 2$, the increase of slope angle
$kh < 2$, the increase of slope angle  ${\gamma _s}$ enhances the probability of freak waves; the directional spreading
${\gamma _s}$ enhances the probability of freak waves; the directional spreading  ${\sigma _\theta }$ plays a more important role in deep water, but bottom topography has a greater impact in shallow water. Compared with figure 8(a),
${\sigma _\theta }$ plays a more important role in deep water, but bottom topography has a greater impact in shallow water. Compared with figure 8(a),  $P_f(H_{max})$ in figure 8(b) is much larger than
$P_f(H_{max})$ in figure 8(b) is much larger than  $P_f(H_{max})$ in general, and it experiences a process of descending, ascending and descending again with the decrease of
$P_f(H_{max})$ in general, and it experiences a process of descending, ascending and descending again with the decrease of  $kh$. In the linear model, the probabilities in figure 8(a,b) show the same result, and their deviation from current models corresponds to the evolution in figure 7. The result from the second-order bound wave model continues to show a strong correlation with wave steepness
$kh$. In the linear model, the probabilities in figure 8(a,b) show the same result, and their deviation from current models corresponds to the evolution in figure 7. The result from the second-order bound wave model continues to show a strong correlation with wave steepness  $\varepsilon $, and it gives an abnormal enhancement in both
$\varepsilon $, and it gives an abnormal enhancement in both  $P_f(H_{max})$ and
$P_f(H_{max})$ and  ${P_f}({\eta _{max}})$ in very shallow water after the slope section, which is not consistent with the natural state and experiments.
${P_f}({\eta _{max}})$ in very shallow water after the slope section, which is not consistent with the natural state and experiments.

Figure 8. Occurrence probability of the freak wave in wave height and free surface elevation distribution at initial BFI = 0.4 from different  ${\sigma _\theta }$ and
${\sigma _\theta }$ and  ${\gamma _s}$ (present model: black,
${\gamma _s}$ (present model: black,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,  ${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,
${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,  ${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,
${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: dotted,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: dotted,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line). (a) probability of
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line). (a) probability of  ${H_{max}} > 8{\eta _{rms}}$ and (b) probability of
${H_{max}} > 8{\eta _{rms}}$ and (b) probability of  ${\eta _{max}} > 4{\eta _{rms}}$.
${\eta _{max}} > 4{\eta _{rms}}$.
In figures 9 and 10, we give the wave height distribution in CDF in logarithmic coordinates at specific sections at different water depths. We choose five sections on the sloping region in figure 4: S1 (dashed line A in previous figures) where  $kh = 5$; S2 where
$kh = 5$; S2 where  $kh = 3$; S3 where
$kh = 3$; S3 where  $kh = 2$; S4 (dashed line C in previous figures) where
$kh = 2$; S4 (dashed line C in previous figures) where  $kh = 1.2$; S5 (dashed line B in previous figures) where
$kh = 1.2$; S5 (dashed line B in previous figures) where  $kh = 1.1$. Figure 9 shows the CDF of
$kh = 1.1$. Figure 9 shows the CDF of  ${P_m}({H_{max}})$ from the same conditions as before compared with the Rayleigh distribution (i.e. linear distribution). As the water depth decreases from S1 to S5, the occurrence probability of
${P_m}({H_{max}})$ from the same conditions as before compared with the Rayleigh distribution (i.e. linear distribution). As the water depth decreases from S1 to S5, the occurrence probability of  ${H_{max}}$ decreases from the comparison with the Rayleigh distribution (the linear distribution model does not change with water depth). The nonlinear model gives a higher exceeding probability of extreme events than the linear distribution in deep water (S1) but lower in shallow water (S4, S5). They have a similar prediction of wave heights distribution in medium-water depth (S2, S3). In S1–S3, the increase of directional spread
${H_{max}}$ decreases from the comparison with the Rayleigh distribution (the linear distribution model does not change with water depth). The nonlinear model gives a higher exceeding probability of extreme events than the linear distribution in deep water (S1) but lower in shallow water (S4, S5). They have a similar prediction of wave heights distribution in medium-water depth (S2, S3). In S1–S3, the increase of directional spread  ${\sigma _\theta }$ leads to the decrease in the probability of exceeding
${\sigma _\theta }$ leads to the decrease in the probability of exceeding  ${H_{max}}/{\eta _{rms}} > 6$. However, in shallow-water depth (S4, S5), the effect of
${H_{max}}/{\eta _{rms}} > 6$. However, in shallow-water depth (S4, S5), the effect of  ${\sigma _\theta }$ is very limited or even becomes opposite. The effect from
${\sigma _\theta }$ is very limited or even becomes opposite. The effect from  ${\gamma _s}$ works mainly in the shallow region, and focuses on the distribution of larger values (i.e. the occurrence of a ‘freak wave’). The result from the second-order bound wave model is hardly affected by the water depth from S1 to S4, but increases in very shallow water S5, especially for the occurrence of extreme values, and exceeds the result from the present model. In figure 10, we give the CDF of
${\gamma _s}$ works mainly in the shallow region, and focuses on the distribution of larger values (i.e. the occurrence of a ‘freak wave’). The result from the second-order bound wave model is hardly affected by the water depth from S1 to S4, but increases in very shallow water S5, especially for the occurrence of extreme values, and exceeds the result from the present model. In figure 10, we give the CDF of  ${P_m}({\eta _{max}})$ in the same form. Basically,
${P_m}({\eta _{max}})$ in the same form. Basically,  ${P_m}({\eta _{max}})$ shows a similar variation as
${P_m}({\eta _{max}})$ shows a similar variation as  ${P_m}({H_{max}})$ under the effect from
${P_m}({H_{max}})$ under the effect from  ${\sigma _\theta }$ and
${\sigma _\theta }$ and  ${\gamma _s}$, but
${\gamma _s}$, but  ${P_m}({\eta _{max}})$ markedly exceeds the Rayleigh distribution, which indicates that the wave deformation makes the wave crest exceed half the wave height due to the nonlinear effect. In shallow water, this deviation becomes more obvious for a smaller value
${P_m}({\eta _{max}})$ markedly exceeds the Rayleigh distribution, which indicates that the wave deformation makes the wave crest exceed half the wave height due to the nonlinear effect. In shallow water, this deviation becomes more obvious for a smaller value  ${\eta _{max}}/{\eta _{rms}} > 3$, even the extreme case decreases, which indicates the second-order nonlinear effect significantly rises due to the bottom topography change.
${\eta _{max}}/{\eta _{rms}} > 3$, even the extreme case decreases, which indicates the second-order nonlinear effect significantly rises due to the bottom topography change.

Figure 9. Exceedance probability of maximum wave height  ${H_{max}}$ at initial BFI = 0.4 from different
${H_{max}}$ at initial BFI = 0.4 from different  ${\sigma _\theta }$ and
${\sigma _\theta }$ and  ${\gamma _s}$ (present model: black cross,
${\gamma _s}$ (present model: black cross,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,  ${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,
${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,  ${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,
${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: black circle,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: black circle,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line); (a) S1
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line); (a) S1  $(kh = 5)$, (b) S2
$(kh = 5)$, (b) S2  $(kh = 3)$, (c) S3
$(kh = 3)$, (c) S3  $(kh = 2)$, (d) S4
$(kh = 2)$, (d) S4  $(kh = 1.2)$ and (e) S5
$(kh = 1.2)$ and (e) S5  $(kh = 1.1)$.
$(kh = 1.1)$.

Figure 10. Exceedance probability of maximum wave crest  ${\eta _{max}}$ at initial BFI = 0.4 from different
${\eta _{max}}$ at initial BFI = 0.4 from different  ${\sigma _\theta }$ and
${\sigma _\theta }$ and  ${\gamma _s}$ (present model: black cross,
${\gamma _s}$ (present model: black cross,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$; blue,  ${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,
${\sigma _\theta } = 0.4\;{\gamma _s} = 0.05$; red,  ${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,
${\sigma _\theta } = 0.5\;{\gamma _s} = 0.05$; yellow,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.02$; grey,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: black circle,
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.01$. Second-order model: black circle,  ${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line); (a) S1
${\sigma _\theta } = 0.3\;{\gamma _s} = 0.05$. Rayleigh distribution: green line); (a) S1  $(kh = 5)$, (b) S2
$(kh = 5)$, (b) S2  $(kh = 3)$, (c) S3
$(kh = 3)$, (c) S3  $(kh = 2)$, (d) S4
$(kh = 2)$, (d) S4  $(kh = 1.2)$ and (e) S5
$(kh = 1.2)$ and (e) S5  $(kh = 1.1)$.
$(kh = 1.1)$.
4. Conclusion
Based on the 2-D dNLS equation and pseudo-spectral method, we establish a third-order nonlinear model for the evolution of the directional wave train in a 2-D wavefield for an uneven bottom. With Monte Carlo simulation from random initial phase information, we summarize the nonlinear effect from four-wave interaction and spatial inhomogeneity and the dispersion from directional spreading in the wave evolution through the statistical features of random irregular waves.
To investigate the occurrence of the freak wave in different conditions, we discuss the contribution to the nonlinear interactions from different mechanisms and hypotheses, and compare the distribution of extreme wave height and crest to find the essential factor. The result indicates the following:
(i) Compared with the unidirectional wave, the directional spreading in the 2-D wavefield significantly affects the wave train evolution and the occurrence of freak waves. The rise of the directional dispersion will make the kurtosis decrease in deep water but increase in shallow water. Correspondingly, the directional spread contributes to the exceedance probability of maximum wave height and crest, the same as kurtosis.
(ii) The directional dispersion effect has almost no effect on the skewness of surface elevation at second order, and the wave steepness mainly determines the skewness in a 2-D wavefield.
(iii) In shallow water, a steep slope angle leads to the local peak of kurtosis due to wave shoaling. Correspondingly, it reflects in the increase of the exceedance probability of maximum wave height and crest.
(iv) Regarding the degree of impact, the dispersion effect from directional spread mainly affects the wave evolution and the occurrence of the freak wave in deep water. However, the bottom topography change becomes the major role in the medium and shallow water before wave breaking.
The model allows a weakly oblique incident wave angle to the slope. The oblique wave case will be given in the near future.
It should be pointed out that this model still needs to be improved due to the following limitations: first, the wave breaking in shallow-water depth is not taken into consideration; second, the bottom topography is idealized, which ignores the variation on the lateral direction and restricts the slope in a relatively mild range about the steepness squared. Additionally, the wavefield in this study is of sufficiently narrow-banded spectrum. To apply the results of this manuscript to field data, we also need to consider the contribution from the bandwidth of the spectrum to the distribution of wave height and crest height (e.g. Næss Reference Næss1985). Furthermore, we assume that there is no extra contribution to the wave evolution during its propagation processes, such as wind or current, so the initial conditions and bottom topography only decide the directional spreading.
Supplementary material
Supplementary material are available at https://doi.org/10.1017/jfm.2023.73.
Acknowledgements
Z.L. wishes to thank MEXT. Scholarship of Japan and N.M. appreciates for Grants-in-Aid for Scientific Research KAKENHI (19H00782) by JSPS for providing necessary support.
Declaration of interests
The authors report no conflict of interest.
































































































































