



1. Introduction
The robot has extensive usage in a variety of fields, including industry, underwater exploration, and rehabilitation medicine [Reference Long, Mou, Zhang, Zhang and Li1–Reference Wang, Cao, Geng, Zhou and Wang3]. However, the robot is usually of substantial nonlinearities, coupled dynamics, and model uncertainty. Moreover, the systems often suffer from disturbance due to unknown environments and external uncertainties. Therefore, a variety of control schemes have been proposed to accurately control the robots.
The control schemes for robot subjected to disturbance can be generally divided into two categories: model-based control and model-free control [Reference Cheng, Huo, Tan and Zhang4]. Thereinto, model-based control necessitates complicated calculations of the accurate dynamic model, such as sliding mode control [Reference Pai5–Reference Naserian, Ramazani, Khaki-Sedigh and Moarefianpour7] and model predictive control (MPC) [Reference Silva, Dórea and Maitell8–Reference Carron, Arcari, Wermelinger, Hewing, Hutter and Zeilinger10]. Whereas, model-free control does not rely on the dynamic model so that it can be applied to the situations where the model of the system is difficult to compute or unknown. In ref. [Reference Li and Shen11], an attack detection approach was proposed for DC servo motor systems, which did not require the prior knowledge of the system model. In refs. [Reference Wang, Dong, Chen, Vu, Shakibjoo and Mohammadzadeh12, Reference Huang, Xu, Chen, Zhang and Mohammadzadeh13], fuzzy control techniques were employed to approximate the system model. In refs. [Reference Ding, Peng, Zhang and Wang14–Reference Lin, Shan, Ma, Tian and Yu17], neural network control techniques were adopted to learn the system model. However, fuzzy control and neural network control require a large number of adjustable parameters and high computational burden. In addition, model-free control can also be achieved through adaptive control technique which can be broadly categorized into learning-based adaptive control [Reference Ouyang, Zhang and Gupta18] and non-learning-based adaptive control [Reference Li, Kang, Branson and Dai19]. Nevertheless, adaptive control also requires extensive computation and may converge slowly for highly complicated and unknown system.
As an effective and relatively simple model-free method, which is easy to implement, and is robust to estimate the unknown uncertain system’s model, time delay estimation (TDE) has been extensively investigated and applied in the control of robot. The fundamental idea of TDE is to estimate the complicated dynamics and external disturbance at the current instant using the time delay information at the previous sampling instant [Reference Youcef-Toumi and Ito20]. A variety of TDE-based control strategies for nonlinear robot systems with uncertainty and unknown disturbance have been proposed. For uncertain robots with external disturbance and backlash hysteresis, a robust model-free control method combining TDE and adaptive terminal sliding mode was proposed in ref. [Reference Ahmed, Wang and Tian21]. Through TDE this method does not necessitate prior knowledge of unknown backlash hysteresis and system dynamics. In the case of nonlinear under-actuation, an artificial-delay control approach with adaptive gains was developed in ref. [Reference Roy, Baldi, Li and Sankaranarayanan22]. This approach does not rely on linearity, the structure of the mass matrix, the boundedness of state derivatives, or unactuated states. A backstepping approach combined with TDE for exoskeleton robot adaptive control was proposed in ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] to estimate the unknown dynamics and address the external bounded disturbance. Although refs. [Reference Youcef-Toumi and Ito20–Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] can achieve model-free control with TDE. However, if the robot is exposed to significant external disturbance, the effectiveness of TDE declines and the TDE error increases, which will severely affect the control performance of the system [Reference Roy, Lee and Baldi24].
To effectively compensate for the TDE error, a model-free adaptive sliding mode control was proposed in ref. [Reference Wang, Fang, Song, Xu and Shen25] for robot with uncertainty, and an adaptive law based on sliding mode was developed to lessen the TDE error. In ref. [Reference Lee, Chang and Jin26], an adaptive robust control was proposed for robot. This control enabled chattering-free, high precision, and strong robustness by combining TDE with adaptive integral sliding mode. In ref. [Reference Wang, Liu, Wang, Ju and Chen27], a robust controller using fractional-order nonsingular terminal sliding modes was developed to enhance the position tracking performance of the robot. A nonlinear adaptive law was developed for the TDE control gain to suppress TDE error. In ref. [Reference Song, Fang and Wang28], the estimation error of TDE was regarded as a disturbance, and an adaptive sliding mode observer was developed to estimate the TDE error. Although TDE error can be effectively suppressed with the methods in refs. [Reference Wang, Fang, Song, Xu and Shen25–Reference Song, Fang and Wang28], when the robot is subjected to significant external disturbance or the state error increases, not only TDE error appears in the systems, but an overlarge control torque may also appear for maintaining the tracking performance, which can cause the required control input torque to rapidly reach saturation [Reference Yang, Huang, He and Cheng29–Reference Sun, Chen, Wang, Qin and Jing31].
The deviation between the actual input saturation control torque and the controller command input torque is called input saturation deviation. In robot trajectory tracking control, the input saturation deviation needs to be specially considered, otherwise the system performance may deteriorate, and even the system stability is destroyed [Reference Jia and Shan32, Reference Hu, Yan, Zhang, Wang and Zeng33]. In ref. [Reference Yang, Tan and Yue34], a method employing active disturbance rejection control and predefined tracking performance functions was proposed. It dealt with the position tracking control of robot manipulators in the presence of input saturation and uncertainty. However, the method in ref. [Reference Yang, Tan and Yue34] is only for one-DOF link robot manipulators. In ref. [Reference Jin, Rocco, Chen and Geng35], an offline model predictive control based on a linear parameter variation model was proposed for free-floating space robots. The input saturation problem was addressed in the constraints of the model predictive control. In ref. [Reference Zhou, Xu and Wu36], a new fractional sliding control method was proposed for a spherical robot. In order to handle input saturation, an auxiliary system was introduced. In ref. [Reference Hu, Wei, Zhang, Han and Liu37], a robust adaptive tracking control approach was proposed for multi-input multi-output mechanical systems with unknown disturbance under actuator input saturation. Thereinto, an actuator saturation compensator was introduced to attenuate the adverse effects of actuator saturation. However, all the methods in refs. [Reference Jin, Rocco, Chen and Geng35–Reference Hu, Wei, Zhang, Han and Liu37] depend on the system model and necessitate prior knowledge about complicated system dynamics.
In this paper, a model-free adaptive robust control method based on TDE is proposed for trajectory tracking of uncertain robot with disturbance and input saturation. The primary contributions of this paper are as follows:
-
Unlike other model-free controllers, TDE is used to approximate the nonlinear dynamics of the robot with disturbance and input saturation with lower computation. Thus, the proposed method is model-free, which does not necessitate the accurate dynamic model of the complicated system.
-
A TDE error observer is developed to compensate for the TDE error. Thus, the inherent TDE error is reduced so that the nonlinear terms can be approximated more accurately.
-
Compared with ref. [Reference Hu, Wei, Zhang, Han and Liu37], an auxiliary system is constructed by the deviation boundary between the command control input and the actual control input subject to input saturation, and an adaptive law is developed for the saturation deviation boundary. Hence, the adverse effects of input saturation can further be diminished.
-
Different from ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23], the final control law is developed by backstepping with the TDE, the TDE error observer, the auxiliary system, and the saturation deviation boundary adaptive law. Hence, the proposed method is robust to disturbance and input saturation simultaneously.
2. Dynamic model of robot
The dynamic model of a robot with n-degrees of freedom (
 $n\boldsymbol{-DOF}$
) is
$n\boldsymbol{-DOF}$
) is
 \begin{equation} {\boldsymbol{M}}\!\left({\boldsymbol{q}}\right)\ddot{{\boldsymbol{q}}}+{\boldsymbol{C}}\!\left({\boldsymbol{q}},\dot{{\boldsymbol{q}}}\right)\dot{{\boldsymbol{q}}}+{\boldsymbol{G}}\!\left({\boldsymbol{q}}\right)+{\boldsymbol{F}}\!\left(\dot{{\boldsymbol{q}}}\right)={\boldsymbol{u}}+{\boldsymbol{d}} \end{equation}
\begin{equation} {\boldsymbol{M}}\!\left({\boldsymbol{q}}\right)\ddot{{\boldsymbol{q}}}+{\boldsymbol{C}}\!\left({\boldsymbol{q}},\dot{{\boldsymbol{q}}}\right)\dot{{\boldsymbol{q}}}+{\boldsymbol{G}}\!\left({\boldsymbol{q}}\right)+{\boldsymbol{F}}\!\left(\dot{{\boldsymbol{q}}}\right)={\boldsymbol{u}}+{\boldsymbol{d}} \end{equation}
where
 ${\boldsymbol{q}},\dot{{\boldsymbol{q}}},\ddot{{\boldsymbol{q}}}\in {\boldsymbol{R}}^{n\times 1}$
are the angular position, angular velocity, and the angular acceleration of the joints, respectively,
${\boldsymbol{q}},\dot{{\boldsymbol{q}}},\ddot{{\boldsymbol{q}}}\in {\boldsymbol{R}}^{n\times 1}$
are the angular position, angular velocity, and the angular acceleration of the joints, respectively,
 $\mathbf{M}({\boldsymbol{q}})\in \mathbf{R}^{n\times n}$
is the symmetric positive definite inertia matrix,
$\mathbf{M}({\boldsymbol{q}})\in \mathbf{R}^{n\times n}$
is the symmetric positive definite inertia matrix,
 $\mathbf{C}({\boldsymbol{q}},\dot{{\boldsymbol{q}}})\in \mathbf{R}^{n\times n}$
is the vector of the Coriolis and centrifugal term,
$\mathbf{C}({\boldsymbol{q}},\dot{{\boldsymbol{q}}})\in \mathbf{R}^{n\times n}$
is the vector of the Coriolis and centrifugal term,
 $\mathbf{G}({\boldsymbol{q}})\in \mathbf{R}^{n\times 1}$
is the gravity,
$\mathbf{G}({\boldsymbol{q}})\in \mathbf{R}^{n\times 1}$
is the gravity,
 $\mathbf{F}(\dot{{\boldsymbol{q}}})\in \mathbf{R}^{n\times 1}$
is the joint friction force,
$\mathbf{F}(\dot{{\boldsymbol{q}}})\in \mathbf{R}^{n\times 1}$
is the joint friction force,
 ${\boldsymbol{d}}\in {\boldsymbol{R}}^{n\times 1}$
is the disturbance, and
${\boldsymbol{d}}\in {\boldsymbol{R}}^{n\times 1}$
is the disturbance, and
 ${\boldsymbol{u}}\in \mathbf{R}^{n\times 1}$
is the actual control torque.
${\boldsymbol{u}}\in \mathbf{R}^{n\times 1}$
is the actual control torque.
The actual control torque
 ${\boldsymbol{u}}$
is limited by input saturation, that is,
${\boldsymbol{u}}$
is limited by input saturation, that is,
 ${\boldsymbol{u}}=\textrm{sat}\!\;(\boldsymbol{\tau }), \boldsymbol{\tau }\in \mathbf{R}^{n\times 1}$
is the command control input for the controller, saturation function is
${\boldsymbol{u}}=\textrm{sat}\!\;(\boldsymbol{\tau }), \boldsymbol{\tau }\in \mathbf{R}^{n\times 1}$
is the command control input for the controller, saturation function is
 $\textrm{sat}\!\;(\tau _{i})=\bigg\{\begin{array}{ll} \text{sign}(\tau _{i})*v_{i}\mathit{},&| \tau _{i}| \geq v_{i}\\ \tau _{i}\mathit{},&| \tau _{i}| \lt v_{i} \end{array}, v_{i}\gt 0$
is a constant,
$\textrm{sat}\!\;(\tau _{i})=\bigg\{\begin{array}{ll} \text{sign}(\tau _{i})*v_{i}\mathit{},&| \tau _{i}| \geq v_{i}\\ \tau _{i}\mathit{},&| \tau _{i}| \lt v_{i} \end{array}, v_{i}\gt 0$
is a constant,
 $\text{sign}({\bullet})$
is the symbolic function, and the subscript
$\text{sign}({\bullet})$
is the symbolic function, and the subscript
 $i=1,2\ldots n$
indicates the
$i=1,2\ldots n$
indicates the
 $i\textrm{-th}$
joint of the robot.
$i\textrm{-th}$
joint of the robot.
Let
 ${\boldsymbol{x}}_{1}={\boldsymbol{q}}, {\boldsymbol{x}}_{2}=\dot{{\boldsymbol{q}}}$
, then the dynamic model (1) can be transformed into the following state-space equation as:
${\boldsymbol{x}}_{1}={\boldsymbol{q}}, {\boldsymbol{x}}_{2}=\dot{{\boldsymbol{q}}}$
, then the dynamic model (1) can be transformed into the following state-space equation as:
 \begin{equation} \left\{\begin{array}{l} \dot{{\boldsymbol{x}}}_{1}={\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{x}}}_{2}={\boldsymbol{M}}^{-1}\!\left({\boldsymbol{q}}\right)\textrm{sat}\!\;\!\left(\boldsymbol{\tau }\right)+{\boldsymbol{M}}^{-1}\!\left({\boldsymbol{q}}\right)\left({-}{\boldsymbol{C}}\!\left({\boldsymbol{q}},\dot{{\boldsymbol{q}}}\right)\dot{{\boldsymbol{q}}}-{\boldsymbol{G}}\!\left({\boldsymbol{q}}\right)-{\boldsymbol{F}}\!\left(\dot{{\boldsymbol{q}}}\right)+{\boldsymbol{d}}\right)\\ {\boldsymbol{y}}={\boldsymbol{x}}_{1} \end{array}\right. \end{equation}
\begin{equation} \left\{\begin{array}{l} \dot{{\boldsymbol{x}}}_{1}={\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{x}}}_{2}={\boldsymbol{M}}^{-1}\!\left({\boldsymbol{q}}\right)\textrm{sat}\!\;\!\left(\boldsymbol{\tau }\right)+{\boldsymbol{M}}^{-1}\!\left({\boldsymbol{q}}\right)\left({-}{\boldsymbol{C}}\!\left({\boldsymbol{q}},\dot{{\boldsymbol{q}}}\right)\dot{{\boldsymbol{q}}}-{\boldsymbol{G}}\!\left({\boldsymbol{q}}\right)-{\boldsymbol{F}}\!\left(\dot{{\boldsymbol{q}}}\right)+{\boldsymbol{d}}\right)\\ {\boldsymbol{y}}={\boldsymbol{x}}_{1} \end{array}\right. \end{equation}
where
 ${\boldsymbol{y}}$
is the output of the robot. Notice that the nonlinear term
${\boldsymbol{y}}$
is the output of the robot. Notice that the nonlinear term
 ${\boldsymbol{M}}^{-1}\!({\boldsymbol{q}})\,\textrm{sat}\!\;(\boldsymbol{\tau })+{\boldsymbol{M}}^{-1}\!({\boldsymbol{q}})({-}{\boldsymbol{C}}({\boldsymbol{q}},\dot{{\boldsymbol{q}}})\dot{{\boldsymbol{q}}}-{\boldsymbol{G}}({\boldsymbol{q}})-{\boldsymbol{F}}(\dot{{\boldsymbol{q}}})+{\boldsymbol{d}})$
in Eq. (2) includes input saturation and all the uncertainty terms of the robot such as disturbance, and uncertain dynamics.
${\boldsymbol{M}}^{-1}\!({\boldsymbol{q}})\,\textrm{sat}\!\;(\boldsymbol{\tau })+{\boldsymbol{M}}^{-1}\!({\boldsymbol{q}})({-}{\boldsymbol{C}}({\boldsymbol{q}},\dot{{\boldsymbol{q}}})\dot{{\boldsymbol{q}}}-{\boldsymbol{G}}({\boldsymbol{q}})-{\boldsymbol{F}}(\dot{{\boldsymbol{q}}})+{\boldsymbol{d}})$
in Eq. (2) includes input saturation and all the uncertainty terms of the robot such as disturbance, and uncertain dynamics.
3. TDE
In practice, it is hard to acquire the dynamic model (2) due to the unknown disturbance and dynamics in the nonlinear terms. TDE technique can estimate all the nonlinear terms of robot at the current instant using the torques and accelerations of the system output at the previous sampling instant.
By introducing a positive definite diagonal constant matrix
 $\bar{{\boldsymbol{M}}}$
, Eq. (2) can be rewritten as:
$\bar{{\boldsymbol{M}}}$
, Eq. (2) can be rewritten as:
 \begin{equation} \left\{\begin{array}{l} \dot{{\boldsymbol{x}}}_{1}={\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!\textrm{sat}\!\;\!\left(\boldsymbol{\tau }\right)-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{S}}_{n}\\ {\boldsymbol{y}}={\boldsymbol{x}}_{1} \end{array}\right. \end{equation}
\begin{equation} \left\{\begin{array}{l} \dot{{\boldsymbol{x}}}_{1}={\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!\textrm{sat}\!\;\!\left(\boldsymbol{\tau }\right)-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{S}}_{n}\\ {\boldsymbol{y}}={\boldsymbol{x}}_{1} \end{array}\right. \end{equation}
where
 ${\boldsymbol{S}}_{n}=(({\boldsymbol{M}}({\boldsymbol{q}})-\bar{{\boldsymbol{M}}})\ddot{{\boldsymbol{q}}}+{\boldsymbol{C}}({\boldsymbol{q}},\dot{{\boldsymbol{q}}})\dot{{\boldsymbol{q}}}+{\boldsymbol{G}}({\boldsymbol{q}})+{\boldsymbol{F}}(\dot{{\boldsymbol{q}}})-{\boldsymbol{d}})$
concentrates all the uncertain terms and unknown disturbance in the nonlinear terms of the robot dynamics. Hence, we employed TDE to estimate
${\boldsymbol{S}}_{n}=(({\boldsymbol{M}}({\boldsymbol{q}})-\bar{{\boldsymbol{M}}})\ddot{{\boldsymbol{q}}}+{\boldsymbol{C}}({\boldsymbol{q}},\dot{{\boldsymbol{q}}})\dot{{\boldsymbol{q}}}+{\boldsymbol{G}}({\boldsymbol{q}})+{\boldsymbol{F}}(\dot{{\boldsymbol{q}}})-{\boldsymbol{d}})$
concentrates all the uncertain terms and unknown disturbance in the nonlinear terms of the robot dynamics. Hence, we employed TDE to estimate
 ${\boldsymbol{S}}_{n}$
, which contains all the uncertain terms and unknown disturbance of the robot under input saturation.
${\boldsymbol{S}}_{n}$
, which contains all the uncertain terms and unknown disturbance of the robot under input saturation.
The second equation in Eq. (3) can be rewritten as:
 \begin{equation} {\boldsymbol{S}}_{n}={\boldsymbol{u}}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2} \end{equation}
\begin{equation} {\boldsymbol{S}}_{n}={\boldsymbol{u}}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2} \end{equation}
Define
 $\hat{{\boldsymbol{S}}}_{n}$
as the estimation of
$\hat{{\boldsymbol{S}}}_{n}$
as the estimation of
 ${\boldsymbol{S}}_{n}$
, then we have
${\boldsymbol{S}}_{n}$
, then we have
 \begin{equation} {\boldsymbol{S}}_{n}\approx \hat{{\boldsymbol{S}}}_{n}={\boldsymbol{S}}_{n\left(t-L\right)}={\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)} \end{equation}
\begin{equation} {\boldsymbol{S}}_{n}\approx \hat{{\boldsymbol{S}}}_{n}={\boldsymbol{S}}_{n\left(t-L\right)}={\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)} \end{equation}
where
 $L$
is the delayed time, which is usually set as a sampling time in practice, and
$L$
is the delayed time, which is usually set as a sampling time in practice, and
 $\dot{{\boldsymbol{x}}}_{2(t-L)}$
represents the value of
$\dot{{\boldsymbol{x}}}_{2(t-L)}$
represents the value of
 $\dot{{\boldsymbol{x}}}_{2}$
after time delay.
$\dot{{\boldsymbol{x}}}_{2}$
after time delay.
Then the TDE error can be obtained as:
 \begin{equation} \boldsymbol{\varepsilon }={\boldsymbol{S}}_{n}-\hat{{\boldsymbol{S}}}_{n} \end{equation}
\begin{equation} \boldsymbol{\varepsilon }={\boldsymbol{S}}_{n}-\hat{{\boldsymbol{S}}}_{n} \end{equation}
Substituting Eqs. (5) and (6) into Eq. (3), we can obtain
 \begin{equation} \left\{\begin{array}{l} \dot{{\boldsymbol{x}}}_{1}={\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+\boldsymbol{\varepsilon }\right)\\ {\boldsymbol{y}}={\boldsymbol{x}}_{1} \end{array}\right. \end{equation}
\begin{equation} \left\{\begin{array}{l} \dot{{\boldsymbol{x}}}_{1}={\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+\boldsymbol{\varepsilon }\right)\\ {\boldsymbol{y}}={\boldsymbol{x}}_{1} \end{array}\right. \end{equation}
Notice that the position
 ${\boldsymbol{x}}_{\textrm{1}}$
is available. The velocity
${\boldsymbol{x}}_{\textrm{1}}$
is available. The velocity
 ${\boldsymbol{x}}_{\textrm{2}}$
and acceleration
${\boldsymbol{x}}_{\textrm{2}}$
and acceleration
 $\dot{{\boldsymbol{x}}}_{\textrm{2}}$
can be calculated by
$\dot{{\boldsymbol{x}}}_{\textrm{2}}$
can be calculated by
 ${\boldsymbol{x}}_{\textrm{1}}$
as follows:
${\boldsymbol{x}}_{\textrm{1}}$
as follows:
 \begin{equation} {\boldsymbol{x}}_{\textrm{2}}\!\left(t\right)=\frac{{\boldsymbol{x}}_{\textrm{1}}\!\left(t\right)-{\boldsymbol{x}}_{1}\!\left(t-L\right)}{L} \end{equation}
\begin{equation} {\boldsymbol{x}}_{\textrm{2}}\!\left(t\right)=\frac{{\boldsymbol{x}}_{\textrm{1}}\!\left(t\right)-{\boldsymbol{x}}_{1}\!\left(t-L\right)}{L} \end{equation}
 \begin{equation} \dot{{\boldsymbol{x}}}_{\textrm{2}}\!\left(t\right)=\frac{{\boldsymbol{x}}_{1}\!\left(t\right)-2{\boldsymbol{x}}_{1}\!\left(t-L\right)-{\boldsymbol{x}}_{1}\!\left(t-2L\right)}{L} \end{equation}
\begin{equation} \dot{{\boldsymbol{x}}}_{\textrm{2}}\!\left(t\right)=\frac{{\boldsymbol{x}}_{1}\!\left(t\right)-2{\boldsymbol{x}}_{1}\!\left(t-L\right)-{\boldsymbol{x}}_{1}\!\left(t-2L\right)}{L} \end{equation}
Lemma 1 ([Reference Jin, Lee and Tsagarakis38, Reference Baek and Baek39]). If the gain matrix
 $\bar{{\boldsymbol{M}}}$
satisfies the following condition:
$\bar{{\boldsymbol{M}}}$
satisfies the following condition:
 \begin{equation} \left\| {\boldsymbol{I}}-{\boldsymbol{M}}^{-\textrm{1}}\mathbf{(}{\boldsymbol{q}}\mathbf{)}\bar{{\boldsymbol{M}}}\right\| \lt 1 \end{equation}
\begin{equation} \left\| {\boldsymbol{I}}-{\boldsymbol{M}}^{-\textrm{1}}\mathbf{(}{\boldsymbol{q}}\mathbf{)}\bar{{\boldsymbol{M}}}\right\| \lt 1 \end{equation}
then the TDE error
 $\boldsymbol{\varepsilon }$
is bounded, that is,
$\boldsymbol{\varepsilon }$
is bounded, that is,
 $\| \boldsymbol{\varepsilon }\| \leq \vartheta _{1}$
, where
$\| \boldsymbol{\varepsilon }\| \leq \vartheta _{1}$
, where
 $\vartheta {1}^{}{}{}$
is a positive constant and
$\vartheta {1}^{}{}{}$
is a positive constant and
 ${\boldsymbol{I}}$
denotes the unit matrix with proper dimension.
${\boldsymbol{I}}$
denotes the unit matrix with proper dimension.
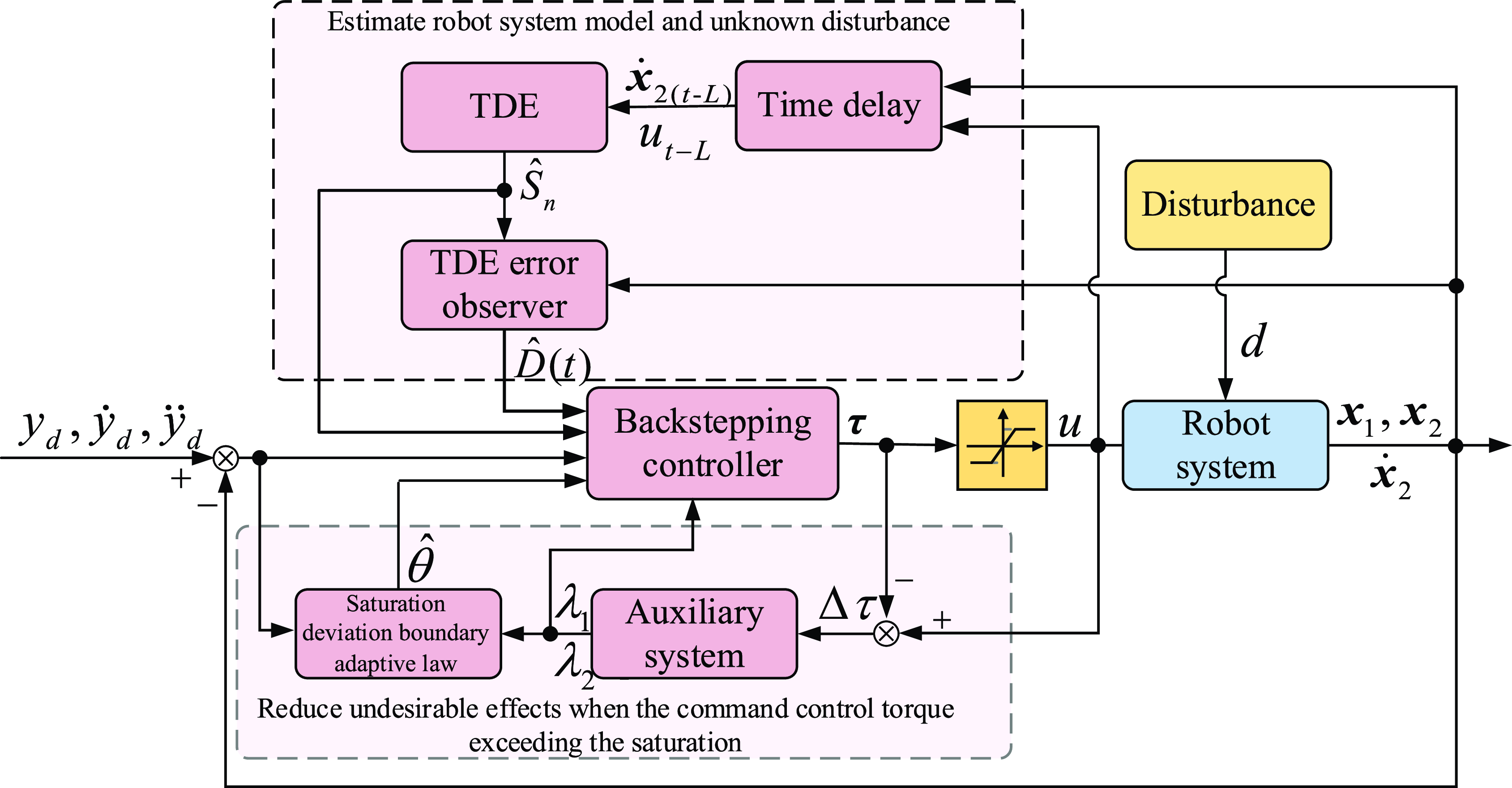
Figure 1. System control block diagram.
4. Model-free adaptive robust control based on TDE
The block diagram of the model-free adaptive robust control based on TDE for robot with disturbance and input saturation is shown in Fig. 1. It consists of three main parts. The first part is the TDE and the TDE error observer which is to estimate the dynamic model and the unknown disturbance of the robot to obtain the model-free characteristics. The second part includes the auxiliary system and the saturation deviation boundary adaptive law which is to reduce the undesirable effects when the control torque exceeds the input saturation. The last part contains a backstepping controller which lumps the output results of the above two parts to obtain the final model-free adaptive robust control. The control goal is to achieve desired position tracking despite the unknown disturbance and input saturation.
4.1. TDE error observer
Since TDE uses the output value of the previous sampling instant to approximately estimate the nonlinear terms at the current instant. When the robot is subject to significant external disturbance, the output value of the previous sampling instant may have error which will affect the system performance or even cause system instability. Thus, a TDE error observer is introduced to observe the TDE error and compensate for the TDE error so that the nonlinear terms can be approximated more accurately.
The second equation in Eq. (7) can be rewritten as:
 \begin{equation} \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+{\boldsymbol{D}}\!\left(t\right) \end{equation}
\begin{equation} \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+{\boldsymbol{D}}\!\left(t\right) \end{equation}
where
 ${\boldsymbol{D}}\!(t)=-\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\varepsilon }$
. Since
${\boldsymbol{D}}\!(t)=-\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\varepsilon }$
. Since
 $\bar{{\boldsymbol{M}}}$
is a constant matrix, then according to Lemma 1, we know that
$\bar{{\boldsymbol{M}}}$
is a constant matrix, then according to Lemma 1, we know that
 $\| \boldsymbol{\varepsilon }\| \leq \vartheta _{1}$
in
$\| \boldsymbol{\varepsilon }\| \leq \vartheta _{1}$
in
 ${\boldsymbol{D}}\!(t)$
. Thus, there exist two positive constants
${\boldsymbol{D}}\!(t)$
. Thus, there exist two positive constants
 $\vartheta_{2}^{}{}{}$
and
$\vartheta_{2}^{}{}{}$
and
 $\vartheta_{3}^{}{}{}$
, such that
$\vartheta_{3}^{}{}{}$
, such that
 $\| {\boldsymbol{D}}\!(t)\| \leq \vartheta _{2}$
and
$\| {\boldsymbol{D}}\!(t)\| \leq \vartheta _{2}$
and
 $\| \dot{{\boldsymbol{D}}}\!(t)\| \leq \vartheta _{3}$
.
$\| \dot{{\boldsymbol{D}}}\!(t)\| \leq \vartheta _{3}$
.
Then the TDE error can be represented in the form as:
 \begin{equation} {\boldsymbol{D}}\!\left(t\right)=-\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right) \end{equation}
\begin{equation} {\boldsymbol{D}}\!\left(t\right)=-\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right) \end{equation}
Now, the TDE error observer is developed as:
 \begin{equation} \left\{\begin{array}{l} \hat{{\boldsymbol{D}}}\!\left(t\right)={\boldsymbol{z}}+{\boldsymbol{J}}{\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{z}}}=-{\boldsymbol{Jz}}-{\boldsymbol{J}}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+{\boldsymbol{J}}{\boldsymbol{x}}_{2}\right) \end{array}\right. \end{equation}
\begin{equation} \left\{\begin{array}{l} \hat{{\boldsymbol{D}}}\!\left(t\right)={\boldsymbol{z}}+{\boldsymbol{J}}{\boldsymbol{x}}_{2}\\ \dot{{\boldsymbol{z}}}=-{\boldsymbol{Jz}}-{\boldsymbol{J}}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+{\boldsymbol{J}}{\boldsymbol{x}}_{2}\right) \end{array}\right. \end{equation}
where
 $\hat{{\boldsymbol{D}}}\!(t)$
is the observed value of
$\hat{{\boldsymbol{D}}}\!(t)$
is the observed value of
 ${\boldsymbol{D}}\!(t), {\boldsymbol{z}}$
is the state of the TDE error observer, and
${\boldsymbol{D}}\!(t), {\boldsymbol{z}}$
is the state of the TDE error observer, and
 ${\boldsymbol{J}}$
as a diagonal matrix is the gain of the observer and satisfies
${\boldsymbol{J}}$
as a diagonal matrix is the gain of the observer and satisfies
 ${\boldsymbol{J}}-\displaystyle\frac{1}{2}{\boldsymbol{I}}\gt \mathbf{0}$
.
${\boldsymbol{J}}-\displaystyle\frac{1}{2}{\boldsymbol{I}}\gt \mathbf{0}$
.
Lemma 2 ([Reference Li, Su, Wang, Chen and Chai40]). (Rayleigh–Ritz Theorem) The Hermitian matrix
 ${\boldsymbol{H}}$
and the vector
${\boldsymbol{H}}$
and the vector
 $\varpi$
satisfy the following inequality:
$\varpi$
satisfy the following inequality:
 \begin{equation} \lambda _{\min }\!\left({\boldsymbol{H}}\right)\!\left\| \varpi \right\| ^{2}\leq \varpi ^{T}{\boldsymbol{H}}\varpi \leq \lambda _{\max }\left({\boldsymbol{H}}\right)\left\| \varpi \right\| ^{2} \end{equation}
\begin{equation} \lambda _{\min }\!\left({\boldsymbol{H}}\right)\!\left\| \varpi \right\| ^{2}\leq \varpi ^{T}{\boldsymbol{H}}\varpi \leq \lambda _{\max }\left({\boldsymbol{H}}\right)\left\| \varpi \right\| ^{2} \end{equation}
where
 $\lambda _{\min }({\bullet})$
and
$\lambda _{\min }({\bullet})$
and
 $\lambda _{\max }({\bullet})$
denote the minimum eigenvalue and the maximum eigenvalue of the matrix, respectively.
$\lambda _{\max }({\bullet})$
denote the minimum eigenvalue and the maximum eigenvalue of the matrix, respectively.
Theorem 1. Consider the robot (7) is subject to external disturbance, if the TDE error observer (13) is employed to estimate the TDE error
 ${\boldsymbol{D}}\!(t)$
in Eq. (11), then the TDE error observer estimation error
${\boldsymbol{D}}\!(t)$
in Eq. (11), then the TDE error observer estimation error
 $\tilde{{\boldsymbol{D}}}(t)={\boldsymbol{D}}\!(t)-\hat{{\boldsymbol{D}}}\!(t)$
will be asymptotically stable in
$\tilde{{\boldsymbol{D}}}(t)={\boldsymbol{D}}\!(t)-\hat{{\boldsymbol{D}}}\!(t)$
will be asymptotically stable in
 $\Omega =\{ \tilde{\boldsymbol{D}}(t):\parallel \tilde{\boldsymbol{D}}(t)\parallel \leq \vartheta_{3}/\lambda _{\min }({\boldsymbol{J}})\}$
.
$\Omega =\{ \tilde{\boldsymbol{D}}(t):\parallel \tilde{\boldsymbol{D}}(t)\parallel \leq \vartheta_{3}/\lambda _{\min }({\boldsymbol{J}})\}$
.
Proof.
Differentiating
 $\hat{{\boldsymbol{D}}}\!(t)$
and substituting Eqs. (11) and (13) into it one can obtain
$\hat{{\boldsymbol{D}}}\!(t)$
and substituting Eqs. (11) and (13) into it one can obtain
 \begin{eqnarray} \dot{\hat{{\boldsymbol{D}}}}\left(t\right)&=&\dot{{\boldsymbol{z}}}+{\boldsymbol{J}}\dot{{\boldsymbol{x}}}_{2}=-{\boldsymbol{Jz}}-{\boldsymbol{J}}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+{\boldsymbol{J}}{\boldsymbol{x}}_{2}\right)+{\boldsymbol{J}}\dot{{\boldsymbol{x}}}_{2}\nonumber\\ &=&-{\boldsymbol{Jz}}-{\boldsymbol{JJ}}{\boldsymbol{x}}_{2}+{\boldsymbol{JD}}\!\left(t\right)=-{\boldsymbol{J}}\hat{{\boldsymbol{D}}}\!\left(t\right)+{\boldsymbol{JD}}\!\left(t\right)\nonumber\\ &=&{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right) \end{eqnarray}
\begin{eqnarray} \dot{\hat{{\boldsymbol{D}}}}\left(t\right)&=&\dot{{\boldsymbol{z}}}+{\boldsymbol{J}}\dot{{\boldsymbol{x}}}_{2}=-{\boldsymbol{Jz}}-{\boldsymbol{J}}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+{\boldsymbol{J}}{\boldsymbol{x}}_{2}\right)+{\boldsymbol{J}}\dot{{\boldsymbol{x}}}_{2}\nonumber\\ &=&-{\boldsymbol{Jz}}-{\boldsymbol{JJ}}{\boldsymbol{x}}_{2}+{\boldsymbol{JD}}\!\left(t\right)=-{\boldsymbol{J}}\hat{{\boldsymbol{D}}}\!\left(t\right)+{\boldsymbol{JD}}\!\left(t\right)\nonumber\\ &=&{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right) \end{eqnarray}
Define the Lyapunov function as:
 \begin{equation} {\boldsymbol{V}}_{D}=\frac{1}{2}\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right) \end{equation}
\begin{equation} {\boldsymbol{V}}_{D}=\frac{1}{2}\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right) \end{equation}
Substituting Eq. (15) into the derivative of Eq. (16) and applying Lemma 2 yield
 \begin{eqnarray} \dot{{\boldsymbol{V}}}_{D}&=&\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\left(\dot{{\boldsymbol{D}}}\!\left(t\right)-{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)\right)\nonumber\\ &\leq& \left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| \vartheta _{3}-\left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| ^{2}\lambda _{\min }\left({\boldsymbol{J}}\right)\nonumber\\ &\leq& -\left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| \left(\lambda _{\min }\left({\boldsymbol{J}}\right)\left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| -\vartheta _{3}\right) \end{eqnarray}
\begin{eqnarray} \dot{{\boldsymbol{V}}}_{D}&=&\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\left(\dot{{\boldsymbol{D}}}\!\left(t\right)-{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)\right)\nonumber\\ &\leq& \left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| \vartheta _{3}-\left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| ^{2}\lambda _{\min }\left({\boldsymbol{J}}\right)\nonumber\\ &\leq& -\left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| \left(\lambda _{\min }\left({\boldsymbol{J}}\right)\left\| \tilde{{\boldsymbol{D}}}\!\left(t\right)\right\| -\vartheta _{3}\right) \end{eqnarray}
Form Eq. (17), if
 ${\boldsymbol{J}}$
is properly selected which satisfies
${\boldsymbol{J}}$
is properly selected which satisfies
 $\| \tilde{{\boldsymbol{D}}}(t)\| \gt \vartheta _{3}/\lambda _{\min }({\boldsymbol{J}})$
, then we have
$\| \tilde{{\boldsymbol{D}}}(t)\| \gt \vartheta _{3}/\lambda _{\min }({\boldsymbol{J}})$
, then we have
 $\dot{{\boldsymbol{V}}}_{D}\lt 0$
. Therefore, the TDE error observer is asymptotically stable to an any small
$\dot{{\boldsymbol{V}}}_{D}\lt 0$
. Therefore, the TDE error observer is asymptotically stable to an any small
 $\Omega$
. Theorem 1 is proved.
$\Omega$
. Theorem 1 is proved.
4.2. Input saturation auxiliary system
In practice, the command control torques of the controller are sometimes limited by the input saturation. When the command control torques exceed, the saturation will result in position tracking error, which will degrade the system performance and even destroy the system stability. To reduce the negative effects of input saturation, the following auxiliary system is further constructed based on ref. [Reference Hu, Wei, Zhang, Han and Liu37] by introducing the saturation deviation boundary:
 \begin{align} \left\{\begin{array}{l} \dot{\boldsymbol{\lambda }}_{1}=-{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}+\boldsymbol{\lambda }_{2}\\ \dot{\boldsymbol{\lambda }}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!\left({-}{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+{\Delta} \boldsymbol{\tau }\right)-\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2} \end{array}\right. \end{align}
\begin{align} \left\{\begin{array}{l} \dot{\boldsymbol{\lambda }}_{1}=-{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}+\boldsymbol{\lambda }_{2}\\ \dot{\boldsymbol{\lambda }}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!\left({-}{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+{\Delta} \boldsymbol{\tau }\right)-\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2} \end{array}\right. \end{align}
where
 $\boldsymbol{\lambda }_{1}\in \mathbf{R}^{n\times 1}, \boldsymbol{\lambda }_{2}\in \mathbf{R}^{n\times 1}$
are the states of the auxiliary system, and
$\boldsymbol{\lambda }_{1}\in \mathbf{R}^{n\times 1}, \boldsymbol{\lambda }_{2}\in \mathbf{R}^{n\times 1}$
are the states of the auxiliary system, and
 ${\boldsymbol{p}}_{1}, {\boldsymbol{p}}_{2}$
are positive definite constant gain matrixes. Also,
${\boldsymbol{p}}_{1}, {\boldsymbol{p}}_{2}$
are positive definite constant gain matrixes. Also,
 ${\Delta} \boldsymbol{\tau }=\textrm{sat}\!\;(\boldsymbol{\tau })-\boldsymbol{\tau }$
is the input saturation deviation which represents the deviation between the actual control input and the command control input under the input saturation limit. Thus, Eq. (11) can be rewritten as:
${\Delta} \boldsymbol{\tau }=\textrm{sat}\!\;(\boldsymbol{\tau })-\boldsymbol{\tau }$
is the input saturation deviation which represents the deviation between the actual control input and the command control input under the input saturation limit. Thus, Eq. (11) can be rewritten as:
 \begin{equation} \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }+\bar{{\boldsymbol{M}}}^{-1}\!{\Delta} \boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+\hat{{\boldsymbol{D}}}\!\left(t\right) \end{equation}
\begin{equation} \dot{{\boldsymbol{x}}}_{2}=\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }+\bar{{\boldsymbol{M}}}^{-1}\!{\Delta} \boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+\hat{{\boldsymbol{D}}}\!\left(t\right) \end{equation}
Remark 1. The input saturation should still ensure the controllability of the robot in practice. Thus, it is generally assumed that
 ${\Delta} \boldsymbol{\tau }$
is bounded and there exists a constant
${\Delta} \boldsymbol{\tau }$
is bounded and there exists a constant
 $\theta \gt 0$
satisfying
$\theta \gt 0$
satisfying
 $\| {\Delta} \boldsymbol{\tau }\| ^{2}\leq \theta$
.
$\| {\Delta} \boldsymbol{\tau }\| ^{2}\leq \theta$
.
4.3. Backstepping controller
The estimated output of the TDE, the TDE error observer, and the auxiliary system are lumped into the backstepping controller. A saturation deviation boundary adaptive law and a model-free adaptive robust controller are developed. Thereby, the robot can track the desired position even with unknown disturbance and input saturation.
Lemma 3 ([Reference Sababheh and Choi41]). (Young’s inequality) For
 $\forall a,b\geq 0, \textrm{A}\gt \textrm{1,\,B}\gt \textrm{1}$
and
$\forall a,b\geq 0, \textrm{A}\gt \textrm{1,\,B}\gt \textrm{1}$
and
 $\displaystyle\frac{1}{\textrm{A }}+\frac{1}{\textrm{B }}=1$
, then
$\displaystyle\frac{1}{\textrm{A }}+\frac{1}{\textrm{B }}=1$
, then
 \begin{equation} ab\leq \frac{a^{\textrm{A }}}{\textrm{A }}+\frac{b^{\textrm{B }}}{\textrm{B }} \end{equation}
\begin{equation} ab\leq \frac{a^{\textrm{A }}}{\textrm{A }}+\frac{b^{\textrm{B }}}{\textrm{B }} \end{equation}
Lemma 4 ([Reference He, Dong and Sun42]). If there exists a positive definite and first-order derivative continuous Lyapunov function
 ${\boldsymbol{V}}(x)$
satisfying
${\boldsymbol{V}}(x)$
satisfying
 $\Phi _{1}(\| x\| )\leq {\boldsymbol{V}}(x)\leq \Phi_{2}(\| x\| )$
, such that
$\Phi _{1}(\| x\| )\leq {\boldsymbol{V}}(x)\leq \Phi_{2}(\| x\| )$
, such that
 $\dot{{\boldsymbol{V}}}(x)\leq -\rho {\boldsymbol{V}}(x)+\Lambda$
, then
$\dot{{\boldsymbol{V}}}(x)\leq -\rho {\boldsymbol{V}}(x)+\Lambda$
, then
 $x(t)$
is uniformly bounded, where
$x(t)$
is uniformly bounded, where
 $\Phi _{1}$
,
$\Phi _{1}$
,
 $\Phi _{2}$
are K-class functions and
$\Phi _{2}$
are K-class functions and
 $\rho$
,
$\rho$
,
 $\Lambda$
are positive constants.
$\Lambda$
are positive constants.
Step 1. Define two error variables as:
 \begin{equation} \left\{\begin{array}{l} {\boldsymbol{e}}_{1}={\boldsymbol{x}}_{1}-{\boldsymbol{y}}_{d}-\boldsymbol{\lambda }_{1}\\ {\boldsymbol{e}}_{2}={\boldsymbol{x}}_{2}-\boldsymbol{\alpha }-\boldsymbol{\lambda }_{2} \end{array}\right. \end{equation}
\begin{equation} \left\{\begin{array}{l} {\boldsymbol{e}}_{1}={\boldsymbol{x}}_{1}-{\boldsymbol{y}}_{d}-\boldsymbol{\lambda }_{1}\\ {\boldsymbol{e}}_{2}={\boldsymbol{x}}_{2}-\boldsymbol{\alpha }-\boldsymbol{\lambda }_{2} \end{array}\right. \end{equation}
where
 ${\boldsymbol{y}}_{d}$
is the desired position and
${\boldsymbol{y}}_{d}$
is the desired position and
 $\boldsymbol{\alpha }$
is the virtual control input to the robot system.
$\boldsymbol{\alpha }$
is the virtual control input to the robot system.
Differentiating
 ${\boldsymbol{e}}_{1}$
in Eq. (21) and substituting it into Eq. (18), we can obtain
${\boldsymbol{e}}_{1}$
in Eq. (21) and substituting it into Eq. (18), we can obtain
 \begin{equation} \dot{{\boldsymbol{e}}}_{1}={\boldsymbol{e}}_{2}+\boldsymbol{\alpha }-{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1} \end{equation}
\begin{equation} \dot{{\boldsymbol{e}}}_{1}={\boldsymbol{e}}_{2}+\boldsymbol{\alpha }-{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1} \end{equation}
Consider the Lyapunov function as:
 \begin{equation} {\boldsymbol{V}}_{1}=\frac{1}{2}{\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{1} \end{equation}
\begin{equation} {\boldsymbol{V}}_{1}=\frac{1}{2}{\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{1} \end{equation}
Differentiating
 ${\boldsymbol{V}}_{1}$
and combining with Eq. (22) yields
${\boldsymbol{V}}_{1}$
and combining with Eq. (22) yields
 \begin{equation} \dot{{\boldsymbol{V}}}_{1}={\boldsymbol{e}}_{1}^{T}\left({\boldsymbol{e}}_{2}+\boldsymbol{\alpha }+{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}-\dot{{\boldsymbol{y}}}_{d}\right) \end{equation}
\begin{equation} \dot{{\boldsymbol{V}}}_{1}={\boldsymbol{e}}_{1}^{T}\left({\boldsymbol{e}}_{2}+\boldsymbol{\alpha }+{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}-\dot{{\boldsymbol{y}}}_{d}\right) \end{equation}
Based on Eq. (24), the following virtual control input is selected as:
 \begin{equation} \boldsymbol{\alpha }=-{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+\dot{{\boldsymbol{y}}}_{d}-{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1} \end{equation}
\begin{equation} \boldsymbol{\alpha }=-{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+\dot{{\boldsymbol{y}}}_{d}-{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1} \end{equation}
where
 ${\boldsymbol{K}}_{1}$
is a positive definite constant matrix. Then, substituting Eq. (24) into Eq. (23) yields
${\boldsymbol{K}}_{1}$
is a positive definite constant matrix. Then, substituting Eq. (24) into Eq. (23) yields
 \begin{equation} \dot{{\boldsymbol{V}}}_{1}={\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1} \end{equation}
\begin{equation} \dot{{\boldsymbol{V}}}_{1}={\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1} \end{equation}
Step 2. Consider the Lyapunov function as:
 \begin{equation} {\boldsymbol{V}}_{2}={\boldsymbol{V}}_{1}+\frac{1}{2}{\boldsymbol{e}}_{2}^{T}{\boldsymbol{e}}_{2} \end{equation}
\begin{equation} {\boldsymbol{V}}_{2}={\boldsymbol{V}}_{1}+\frac{1}{2}{\boldsymbol{e}}_{2}^{T}{\boldsymbol{e}}_{2} \end{equation}
From Eqs. (19) and (21), differentiating
 ${\boldsymbol{e}}_{2}$
in Eq. (21), we have
${\boldsymbol{e}}_{2}$
in Eq. (21), we have
 \begin{eqnarray} \dot{{\boldsymbol{e}}}_{2}&=&\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}\nonumber\\ && +\,\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2} \end{eqnarray}
\begin{eqnarray} \dot{{\boldsymbol{e}}}_{2}&=&\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}\nonumber\\ && +\,\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2} \end{eqnarray}
Differentiating
 ${\boldsymbol{V}}_{2}$
and combining with Eq. (28), it can be obtained that
${\boldsymbol{V}}_{2}$
and combining with Eq. (28), it can be obtained that
 \begin{eqnarray} \dot{{\boldsymbol{V}}}_{2}&=&\dot{{\boldsymbol{V}}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+\hat{{\boldsymbol{D}}}\!\left(t\right)\right.-\dot{\boldsymbol{\alpha }}\nonumber\\ &&\left.+\,\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\nonumber\\ &\leq& {\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)\right.\nonumber\\ &&\left.+\,\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}+\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \boldsymbol{\theta }\right) \end{eqnarray}
\begin{eqnarray} \dot{{\boldsymbol{V}}}_{2}&=&\dot{{\boldsymbol{V}}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)+\hat{{\boldsymbol{D}}}\!\left(t\right)\right.-\dot{\boldsymbol{\alpha }}\nonumber\\ &&\left.+\,\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\nonumber\\ &\leq& {\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}\!\left({\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right)\right.\nonumber\\ &&\left.+\,\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}+\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \boldsymbol{\theta }\right) \end{eqnarray}
where
 $0\lt \mu \lt 1$
.
$0\lt \mu \lt 1$
.
Then the model-free adaptive robust controller
 $\boldsymbol{\tau }$
can be developed as:
$\boldsymbol{\tau }$
can be developed as:
 \begin{eqnarray} \boldsymbol{\tau }&=&{\boldsymbol{u}}_{t-L}-{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\bar{{\boldsymbol{M}}}\left({-}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}-\hat{{\boldsymbol{D}}}\!\left(t\right)+\dot{\boldsymbol{\alpha }}-\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right.\nonumber\\ &&\left.+\,{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}\right) \end{eqnarray}
\begin{eqnarray} \boldsymbol{\tau }&=&{\boldsymbol{u}}_{t-L}-{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\bar{{\boldsymbol{M}}}\left({-}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}-\hat{{\boldsymbol{D}}}\!\left(t\right)+\dot{\boldsymbol{\alpha }}-\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right.\nonumber\\ &&\left.+\,{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}\right) \end{eqnarray}
where
 ${\Xi} =\textrm{diag}[\text{sign}({\boldsymbol{e}}_{2i})], {\boldsymbol{K}}_{2}$
is a positive definite constant matrix and
${\Xi} =\textrm{diag}[\text{sign}({\boldsymbol{e}}_{2i})], {\boldsymbol{K}}_{2}$
is a positive definite constant matrix and
 $\hat{\boldsymbol{\theta }}$
is the estimation of
$\hat{\boldsymbol{\theta }}$
is the estimation of
 $\boldsymbol{\theta }$
.
$\boldsymbol{\theta }$
.
Since
 $\| {\Delta} \boldsymbol{\tau }\| ^{2}\leq \theta$
, we can get
$\| {\Delta} \boldsymbol{\tau }\| ^{2}\leq \theta$
, we can get
 \begin{equation} {\boldsymbol{e}}_{2}^{T}\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\leq \sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2i}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2i}}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \boldsymbol{\theta } \end{equation}
\begin{equation} {\boldsymbol{e}}_{2}^{T}\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\leq \sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2i}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2i}}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \boldsymbol{\theta } \end{equation}
 \begin{equation} {\boldsymbol{e}}_{2}^{T}{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}=\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2i}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2i}}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }} \end{equation}
\begin{equation} {\boldsymbol{e}}_{2}^{T}{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}=\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2i}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2i}}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }} \end{equation}
Substituting Eq. (30) into Eq. (29) yields
 \begin{eqnarray*} \dot{{\boldsymbol{V}}}_{2}&\leq& {\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}{\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right.\nonumber\\ &&\left.+\,\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}+\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\nonumber\\ &=&{\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}\right.\nonumber\\ && -\,{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}-{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}-\hat{{\boldsymbol{D}}}\!\left(t\right)\nonumber\\ &&+\,\dot{\boldsymbol{\alpha }}-\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}\nonumber\\ &&\left.+\,\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\end{eqnarray*}
\begin{eqnarray*} \dot{{\boldsymbol{V}}}_{2}&\leq& {\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\boldsymbol{\tau }-\bar{{\boldsymbol{M}}}^{-1}{\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}\right.\nonumber\\ &&\left.+\,\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}+\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\nonumber\\ &=&{\boldsymbol{e}}_{1}^{T}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}+{\boldsymbol{e}}_{2}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}\right.\nonumber\\ && -\,{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}-{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}-\hat{{\boldsymbol{D}}}\!\left(t\right)\nonumber\\ &&+\,\dot{\boldsymbol{\alpha }}-\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}-\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{u}}_{t-L}+\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+\hat{{\boldsymbol{D}}}\!\left(t\right)-\dot{\boldsymbol{\alpha }}\nonumber\\ &&\left.+\,\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\end{eqnarray*}
 \begin{eqnarray} &=&-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}+{\boldsymbol{e}}_{2}^{T}\left({-}{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}\right.\nonumber\\ &&\left.+\,\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\end{eqnarray}
\begin{eqnarray} &=&-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}+{\boldsymbol{e}}_{2}^{T}\left({-}{\Xi} \boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}\right.\nonumber\\ &&\left.+\,\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right)\end{eqnarray}
Substituting Eqs. (31) and (32) into Eq. (33) yields
 \begin{eqnarray} \dot{{\boldsymbol{V}}}_{2}&\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}\nonumber\\ &&+\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}^{}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \boldsymbol{\theta }\nonumber\\ &=&-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \tilde{\boldsymbol{\theta }} \end{eqnarray}
\begin{eqnarray} \dot{{\boldsymbol{V}}}_{2}&\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \hat{\boldsymbol{\theta }}\nonumber\\ &&+\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}^{}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \boldsymbol{\theta }\nonumber\\ &=&-{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \tilde{\boldsymbol{\theta }} \end{eqnarray}
where
 $\tilde{\boldsymbol{\theta }}=\hat{\boldsymbol{\theta }}-\boldsymbol{\theta }$
.
$\tilde{\boldsymbol{\theta }}=\hat{\boldsymbol{\theta }}-\boldsymbol{\theta }$
.
Step 3. Consider the Lyapunov function as:
 \begin{equation} {\boldsymbol{V}}={\boldsymbol{V}}_{2}+\frac{1}{2\mu }\tilde{\boldsymbol{\theta }}^{T}\tilde{\boldsymbol{\theta }}+\frac{1}{2}\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\frac{1}{2}{\boldsymbol{\lambda }_{1}}^{T}\boldsymbol{\lambda }_{1}+\frac{1}{2}{\boldsymbol{\lambda }_{2}}^{T}\boldsymbol{\lambda }_{2} \end{equation}
\begin{equation} {\boldsymbol{V}}={\boldsymbol{V}}_{2}+\frac{1}{2\mu }\tilde{\boldsymbol{\theta }}^{T}\tilde{\boldsymbol{\theta }}+\frac{1}{2}\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\frac{1}{2}{\boldsymbol{\lambda }_{1}}^{T}\boldsymbol{\lambda }_{1}+\frac{1}{2}{\boldsymbol{\lambda }_{2}}^{T}\boldsymbol{\lambda }_{2} \end{equation}
Differentiating Eq. (35) and using Lemma 3 and Eq. (34) lead to
 \begin{eqnarray} \dot{{\boldsymbol{V}}}&=&\dot{{\boldsymbol{V}}}_{2}+\frac{1}{\mu }\tilde{\boldsymbol{\theta }}^{T}\dot{\tilde{\boldsymbol{\theta }}}+\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\left(\dot{{\boldsymbol{D}}}\!\left(t\right)-{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)\right)+{\boldsymbol{\lambda }_{1}}^{T}\dot{\boldsymbol{\lambda }}_{1}+{\boldsymbol{\lambda }_{2}}^{T}\dot{\boldsymbol{\lambda }}_{2}\nonumber\\ &\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \tilde{\boldsymbol{\theta }}+\frac{1}{\mu }\tilde{\boldsymbol{\theta }}^{T}\dot{\hat{\boldsymbol{\theta }}}\nonumber\\ &&-\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\dot{{\boldsymbol{D}}}\!\left(t\right)+{\boldsymbol{\lambda }_{1}}^{T}\left({-}{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}+\boldsymbol{\lambda }_{2}\right)\nonumber\\&& +{\boldsymbol{\lambda }_{2}}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!\left({-}{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+{\Delta} \boldsymbol{\tau }\right)-\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right) \end{eqnarray}
\begin{eqnarray} \dot{{\boldsymbol{V}}}&=&\dot{{\boldsymbol{V}}}_{2}+\frac{1}{\mu }\tilde{\boldsymbol{\theta }}^{T}\dot{\tilde{\boldsymbol{\theta }}}+\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\left(\dot{{\boldsymbol{D}}}\!\left(t\right)-{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)\right)+{\boldsymbol{\lambda }_{1}}^{T}\dot{\boldsymbol{\lambda }}_{1}+{\boldsymbol{\lambda }_{2}}^{T}\dot{\boldsymbol{\lambda }}_{2}\nonumber\\ &\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\sum _{j=1}^{n}\left| {\boldsymbol{e}}_{\textrm{2j}}\right| \left\| \boldsymbol{\lambda }_{\textrm{2j}}^{}\right\| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\mu \tilde{\boldsymbol{\theta }}+\frac{1}{\mu }\tilde{\boldsymbol{\theta }}^{T}\dot{\hat{\boldsymbol{\theta }}}\nonumber\\ &&-\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\dot{{\boldsymbol{D}}}\!\left(t\right)+{\boldsymbol{\lambda }_{1}}^{T}\left({-}{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}+\boldsymbol{\lambda }_{2}\right)\nonumber\\&& +{\boldsymbol{\lambda }_{2}}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!\left({-}{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}+{\Delta} \boldsymbol{\tau }\right)-\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\right) \end{eqnarray}
According to Eq. (36), the adaptive update law of
 $\hat{\boldsymbol{\theta }}$
is developed as:
$\hat{\boldsymbol{\theta }}$
is developed as:
 \begin{equation} \dot{\hat{\boldsymbol{\theta }}}=\mu \left(\mu \left| {\boldsymbol{e}}_{2}\right| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\boldsymbol{\lambda }_{2}-\beta \hat{\boldsymbol{\theta }}\right) \end{equation}
\begin{equation} \dot{\hat{\boldsymbol{\theta }}}=\mu \left(\mu \left| {\boldsymbol{e}}_{2}\right| \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\boldsymbol{\lambda }_{2}-\beta \hat{\boldsymbol{\theta }}\right) \end{equation}
where
 $\beta \gt 0$
is the adaptive gain.
$\beta \gt 0$
is the adaptive gain.
Substituting Eq. (37) into Eq. (36) yields
 \begin{eqnarray} \dot{{\boldsymbol{V}}}&\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\beta \left(\left(\hat{\boldsymbol{\theta }}-\boldsymbol{\theta }\right)^{2}-\boldsymbol{\theta }^{2}\right)-\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\frac{1}{2}\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right)\nonumber\\ &&+\,\frac{1}{2}\dot{{\boldsymbol{D}}}\!\left(t\right)^{T}\dot{{\boldsymbol{D}}}\!\left(t\right)-{\boldsymbol{\lambda }_{1}}^{T}{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}+{\boldsymbol{\lambda }_{1}}^{T}\boldsymbol{\lambda }_{2}-{\boldsymbol{\lambda }_{2}}^{T}\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}\nonumber\\ &&+\,{\boldsymbol{\lambda }_{2}}^{T}\bar{{\boldsymbol{M}}}^{-1}\!{\Delta} \boldsymbol{\tau }-{\boldsymbol{\lambda }_{2}}^{T}\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\nonumber\\ &\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{\lambda }_{1}}^{T}\left({\boldsymbol{p}}_{1}-\frac{{\boldsymbol{I}}}{2}\right)\boldsymbol{\lambda }_{1}-{\boldsymbol{\lambda }_{2}}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}+\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2} -{\boldsymbol{I}}\right)\boldsymbol{\lambda }_{2}\nonumber\\&&-\,\beta \tilde{\boldsymbol{\theta }}^{2}-\lambda _{\min }\left({\boldsymbol{J}}-\frac{{\boldsymbol{I}}}{2}\right)\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\beta \boldsymbol{\theta }^{2}+\frac{1}{2}{\vartheta _{3}}^{2}\nonumber\\ &&+\,\frac{1}{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\nonumber\\ &\leq& -N{\boldsymbol{V}}+{\Psi} \end{eqnarray}
\begin{eqnarray} \dot{{\boldsymbol{V}}}&\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-\beta \left(\left(\hat{\boldsymbol{\theta }}-\boldsymbol{\theta }\right)^{2}-\boldsymbol{\theta }^{2}\right)-\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}{\boldsymbol{J}}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\frac{1}{2}\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right)\nonumber\\ &&+\,\frac{1}{2}\dot{{\boldsymbol{D}}}\!\left(t\right)^{T}\dot{{\boldsymbol{D}}}\!\left(t\right)-{\boldsymbol{\lambda }_{1}}^{T}{\boldsymbol{p}}_{1}\boldsymbol{\lambda }_{1}+{\boldsymbol{\lambda }_{1}}^{T}\boldsymbol{\lambda }_{2}-{\boldsymbol{\lambda }_{2}}^{T}\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}\nonumber\\ &&+\,{\boldsymbol{\lambda }_{2}}^{T}\bar{{\boldsymbol{M}}}^{-1}\!{\Delta} \boldsymbol{\tau }-{\boldsymbol{\lambda }_{2}}^{T}\boldsymbol{\lambda }_{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\nonumber\\ &\leq& -{\boldsymbol{e}}_{1}^{T}{\boldsymbol{K}}_{1}{\boldsymbol{e}}_{1}-{\boldsymbol{e}}_{2}^{T}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{\lambda }_{1}}^{T}\left({\boldsymbol{p}}_{1}-\frac{{\boldsymbol{I}}}{2}\right)\boldsymbol{\lambda }_{1}-{\boldsymbol{\lambda }_{2}}^{T}\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}+\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2} -{\boldsymbol{I}}\right)\boldsymbol{\lambda }_{2}\nonumber\\&&-\,\beta \tilde{\boldsymbol{\theta }}^{2}-\lambda _{\min }\left({\boldsymbol{J}}-\frac{{\boldsymbol{I}}}{2}\right)\tilde{{\boldsymbol{D}}}\!\left(t\right)^{T}\tilde{{\boldsymbol{D}}}\!\left(t\right)+\beta \boldsymbol{\theta }^{2}+\frac{1}{2}{\vartheta _{3}}^{2}\nonumber\\ &&+\,\frac{1}{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\nonumber\\ &\leq& -N{\boldsymbol{V}}+{\Psi} \end{eqnarray}
where
 \begin{eqnarray} N&=&\min \!\left\{2\lambda _{\min }\!\left({\boldsymbol{K}}_{1}\right),2\lambda _{\min }\left({\boldsymbol{K}}_{2}\right),\lambda _{\min }\left(2{\boldsymbol{p}}_{1}-{\boldsymbol{I}}\right),\right.\nonumber\\ &&2\lambda _{\min }\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}+\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}-{\boldsymbol{I}}\right),\nonumber\\&& \left.2\lambda _{\min }\left(\beta \right),2\lambda _{\min }\left({\textit{\textbf{J}}}-\frac{{\boldsymbol{I}}}{2}\right)\right\} \end{eqnarray}
\begin{eqnarray} N&=&\min \!\left\{2\lambda _{\min }\!\left({\boldsymbol{K}}_{1}\right),2\lambda _{\min }\left({\boldsymbol{K}}_{2}\right),\lambda _{\min }\left(2{\boldsymbol{p}}_{1}-{\boldsymbol{I}}\right),\right.\nonumber\\ &&2\lambda _{\min }\left(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}+\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}-{\boldsymbol{I}}\right),\nonumber\\&& \left.2\lambda _{\min }\left(\beta \right),2\lambda _{\min }\left({\textit{\textbf{J}}}-\frac{{\boldsymbol{I}}}{2}\right)\right\} \end{eqnarray}
 \begin{equation} {\Psi} =\beta \boldsymbol{\theta }^{2}+\frac{1}{2}{\vartheta _{3}}^{2}+\frac{1}{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\gt 0 \end{equation}
\begin{equation} {\Psi} =\beta \boldsymbol{\theta }^{2}+\frac{1}{2}{\vartheta _{3}}^{2}+\frac{1}{2}\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }\right\| ^{2}\gt 0 \end{equation}
The parameters
 ${\boldsymbol{p}}_{1}, {\boldsymbol{p}}_{2}$
, and
${\boldsymbol{p}}_{1}, {\boldsymbol{p}}_{2}$
, and
 ${\boldsymbol{J}}$
need to be chosen in such way that the following conditions are satisfied
${\boldsymbol{J}}$
need to be chosen in such way that the following conditions are satisfied
 \begin{equation} \lambda _{\min }(2{\boldsymbol{p}}_{1}-{\boldsymbol{I}})\gt 0, \,\,\lambda _{\min }(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}+\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }^{}\right\| ^{2}-{\boldsymbol{I}})\gt 0, \quad \lambda _{\min }\left({\boldsymbol{J}}-\frac{{\boldsymbol{I}}}{2}\right)\gt 0 \end{equation}
\begin{equation} \lambda _{\min }(2{\boldsymbol{p}}_{1}-{\boldsymbol{I}})\gt 0, \,\,\lambda _{\min }(\bar{{\boldsymbol{M}}}^{-1}\!{\boldsymbol{p}}_{2}+\left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\left\| {\Delta} \boldsymbol{\tau }^{}\right\| ^{2}-{\boldsymbol{I}})\gt 0, \quad \lambda _{\min }\left({\boldsymbol{J}}-\frac{{\boldsymbol{I}}}{2}\right)\gt 0 \end{equation}
 \begin{equation} 0\leq {\boldsymbol{V}}\leq \frac{{\Psi} }{N}+\left({\boldsymbol{V}}(0)-\frac{{\Psi} }{N}\right)e^{-Nt} \end{equation}
\begin{equation} 0\leq {\boldsymbol{V}}\leq \frac{{\Psi} }{N}+\left({\boldsymbol{V}}(0)-\frac{{\Psi} }{N}\right)e^{-Nt} \end{equation}
From Lemma 4 and Eq. (42), it follows that
 ${\boldsymbol{V}}$
is bounded when
${\boldsymbol{V}}$
is bounded when
 $t\rightarrow \infty, {\boldsymbol{V}}=\displaystyle\frac{{\Psi} }{N}$
. Thus,
$t\rightarrow \infty, {\boldsymbol{V}}=\displaystyle\frac{{\Psi} }{N}$
. Thus,
 ${\boldsymbol{e}}_{1}, {\boldsymbol{e}}_{2}, \tilde{\boldsymbol{\theta }}, \tilde{{\boldsymbol{D}}}(t), \boldsymbol{\lambda }_{1}$
and
${\boldsymbol{e}}_{1}, {\boldsymbol{e}}_{2}, \tilde{\boldsymbol{\theta }}, \tilde{{\boldsymbol{D}}}(t), \boldsymbol{\lambda }_{1}$
and
 $\boldsymbol{\lambda }_{2}$
in the system are uniformly ultimately bounded. Since
$\boldsymbol{\lambda }_{2}$
in the system are uniformly ultimately bounded. Since
 ${\boldsymbol{e}}_{1}$
and
${\boldsymbol{e}}_{1}$
and
 $\boldsymbol{\lambda }_{1}$
are bounded, and
$\boldsymbol{\lambda }_{1}$
are bounded, and
 ${\boldsymbol{e}}_{1}={\boldsymbol{x}}_{1}-{\boldsymbol{y}}_{d}-\boldsymbol{\lambda }_{1}$
in Eq. (21), the position tracking error
${\boldsymbol{e}}_{1}={\boldsymbol{x}}_{1}-{\boldsymbol{y}}_{d}-\boldsymbol{\lambda }_{1}$
in Eq. (21), the position tracking error
 ${\boldsymbol{x}}_{1}-{\boldsymbol{y}}_{d}$
is uniformly ultimately bounded.
${\boldsymbol{x}}_{1}-{\boldsymbol{y}}_{d}$
is uniformly ultimately bounded.
However,
 $\text{sign}({\bullet})$
function may lead to chattering phenomenon. In order to obtain good linear characteristics,
$\text{sign}({\bullet})$
function may lead to chattering phenomenon. In order to obtain good linear characteristics,
 $\text{sign}({\bullet})$
is replaced by a smoother function
$\text{sign}({\bullet})$
is replaced by a smoother function
 $\text{tansig}({\bullet})$
. Furthermore, a parameter
$\text{tansig}({\bullet})$
. Furthermore, a parameter
 $\sigma$
is introduced to adjust the width of the approximate linear band. The smaller the
$\sigma$
is introduced to adjust the width of the approximate linear band. The smaller the
 $\sigma$
is, the wider the width of the approximate linear band is. The function is as follows:
$\sigma$
is, the wider the width of the approximate linear band is. The function is as follows:
 \begin{equation} \text{tansig}\!\left(\sigma \cdot \right)=\frac{2}{1+e^{\left({-}2\sigma \cdot \right)}}-1 \end{equation}
\begin{equation} \text{tansig}\!\left(\sigma \cdot \right)=\frac{2}{1+e^{\left({-}2\sigma \cdot \right)}}-1 \end{equation}
Finally, the model-free adaptive robust controller can be written as:
 \begin{eqnarray*} \boldsymbol{\tau }&=&\underset{\boldsymbol{TDE + TDE error observer}}{\underbrace{{\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\left(\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+\hat{{\boldsymbol{D}}}\!\left(t\right)\right)}}+\underset{\boldsymbol{robust terms}}{\underbrace{\bar{{\boldsymbol{M}}}\left({-}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}+\dot{\boldsymbol{\alpha }}\right.}}\end{eqnarray*}
\begin{eqnarray*} \boldsymbol{\tau }&=&\underset{\boldsymbol{TDE + TDE error observer}}{\underbrace{{\boldsymbol{u}}_{t-L}-\bar{{\boldsymbol{M}}}\left(\dot{{\boldsymbol{x}}}_{2\left(t-L\right)}+\hat{{\boldsymbol{D}}}\!\left(t\right)\right)}}+\underset{\boldsymbol{robust terms}}{\underbrace{\bar{{\boldsymbol{M}}}\left({-}{\boldsymbol{K}}_{2}{\boldsymbol{e}}_{2}-{\boldsymbol{e}}_{1}+\dot{\boldsymbol{\alpha }}\right.}}\end{eqnarray*}
 \begin{eqnarray} &&\underset{\boldsymbol{input saturation compensate terms} }{\underbrace{\left.+\,\mu \kappa \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\boldsymbol{\lambda }_{2}\hat{\boldsymbol{\theta }}\right)-{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}}} \end{eqnarray}
\begin{eqnarray} &&\underset{\boldsymbol{input saturation compensate terms} }{\underbrace{\left.+\,\mu \kappa \left\| \bar{{\boldsymbol{M}}}^{-1}\right\| ^{2}\boldsymbol{\lambda }_{2}\hat{\boldsymbol{\theta }}\right)-{\boldsymbol{p}}_{2}\boldsymbol{\lambda }_{2}}} \end{eqnarray}
where
 $\kappa =\textrm{diag}[\text{tansig}(\sigma {\boldsymbol{e}}_{2i})]$
.
$\kappa =\textrm{diag}[\text{tansig}(\sigma {\boldsymbol{e}}_{2i})]$
.
Remark 2. Compared with the basic simple controllers such as MPC and Proportional-Derivative (PD), our proposed model-free adaptive robust controller can deal with disturbance and input saturation simultaneously. Meanwhile, it does not necessitate the accurate dynamic model of the complicated system.
5. Simulation studies
In order to verify the effectiveness of the method in this paper, a two-link robot as shown in Fig. 2 is used. The mathematical model of the two-link robot is given as follows [Reference Baek, Cho and Han43]:
 \begin{eqnarray} {\boldsymbol{M}}\!\left({\boldsymbol{q}}\right)&=&\left[\begin{array}{cc} \left(m_{1}+m_{2}\right)r_{1}^{2}+m_{2}r_{2}^{2}+2m_{2}r_{1}r_{2}\cos\!\left(q_{2}\right) &\quad m_{2}r_{2}^{2}+m_{2}r_{1}r_{2}\cos\!\left(q_{2}\right)\\[4pt] m_{2}r_{2}^{2}+m_{2}r_{1}r_{2}\cos\!\left(q_{2}\right) &\quad m_{2}r_{2}^{2} \end{array}\right]\nonumber\\[6pt] {\boldsymbol{C}}\!\left({\boldsymbol{q}},\dot{{\boldsymbol{q}}}\right)&=&\left[\begin{array}{cc} -m_{2}r_{1}r_{2}\sin\! \left(q_{2}\right)\dot{q}_{2} &\quad -m_{2}r_{1}r_{2}\sin\!\left(q_{2}\right)\left(\dot{q}_{1}+\dot{q}_{2}\right)\\[4pt] m_{2}r_{1}r_{2}\sin\!\left(q_{2}\right)\dot{q}_{1} &\quad 0 \end{array}\right]\nonumber\\[6pt] {\boldsymbol{G}}\!\left({\boldsymbol{q}}\right)&=&\left[\begin{array}{c} \left(m_{1}+m_{2}\right)r_{1}^{2}\cos\!\left(q_{2}\right)g+m_{2}r_{2}\cos\!\left(q_{1}+q_{2}\right)g\\[4pt] m_{2}r_{2}\cos\!\left(q_{1}+q_{2}\right)g \end{array}\right] \end{eqnarray}
\begin{eqnarray} {\boldsymbol{M}}\!\left({\boldsymbol{q}}\right)&=&\left[\begin{array}{cc} \left(m_{1}+m_{2}\right)r_{1}^{2}+m_{2}r_{2}^{2}+2m_{2}r_{1}r_{2}\cos\!\left(q_{2}\right) &\quad m_{2}r_{2}^{2}+m_{2}r_{1}r_{2}\cos\!\left(q_{2}\right)\\[4pt] m_{2}r_{2}^{2}+m_{2}r_{1}r_{2}\cos\!\left(q_{2}\right) &\quad m_{2}r_{2}^{2} \end{array}\right]\nonumber\\[6pt] {\boldsymbol{C}}\!\left({\boldsymbol{q}},\dot{{\boldsymbol{q}}}\right)&=&\left[\begin{array}{cc} -m_{2}r_{1}r_{2}\sin\! \left(q_{2}\right)\dot{q}_{2} &\quad -m_{2}r_{1}r_{2}\sin\!\left(q_{2}\right)\left(\dot{q}_{1}+\dot{q}_{2}\right)\\[4pt] m_{2}r_{1}r_{2}\sin\!\left(q_{2}\right)\dot{q}_{1} &\quad 0 \end{array}\right]\nonumber\\[6pt] {\boldsymbol{G}}\!\left({\boldsymbol{q}}\right)&=&\left[\begin{array}{c} \left(m_{1}+m_{2}\right)r_{1}^{2}\cos\!\left(q_{2}\right)g+m_{2}r_{2}\cos\!\left(q_{1}+q_{2}\right)g\\[4pt] m_{2}r_{2}\cos\!\left(q_{1}+q_{2}\right)g \end{array}\right] \end{eqnarray}
In the simulation, parameters of the two-link robot are shown in Table I. The input saturation is
 $\bigg\{\begin{array}{l} \tau _{\max }=15\\ \tau _{\min }=-16 \end{array}$
. The friction is assumed to be
$\bigg\{\begin{array}{l} \tau _{\max }=15\\ \tau _{\min }=-16 \end{array}$
. The friction is assumed to be
 ${\boldsymbol{F}}(\dot{{\boldsymbol{q}}})=\left[\begin{array}{l} 0.02\sin\! (q_{1})\\ 0.02\sin\!(q_{2}) \end{array}\right]$
, and the external disturbance is
${\boldsymbol{F}}(\dot{{\boldsymbol{q}}})=\left[\begin{array}{l} 0.02\sin\! (q_{1})\\ 0.02\sin\!(q_{2}) \end{array}\right]$
, and the external disturbance is
 ${\boldsymbol{d}}=2\times \left[\begin{array}{c} 2.5\sin\! (2{\Pi} t)+4\sin\! (3{\Pi} )+1.3\\ 5\sin\! (2{\Pi} t-{\Pi} /2)+0.6\sin\! (5{\Pi} t)+1.4 \end{array}\right]$
.
${\boldsymbol{d}}=2\times \left[\begin{array}{c} 2.5\sin\! (2{\Pi} t)+4\sin\! (3{\Pi} )+1.3\\ 5\sin\! (2{\Pi} t-{\Pi} /2)+0.6\sin\! (5{\Pi} t)+1.4 \end{array}\right]$
.

Figure 2. Model of a two-link robot.
Table I. Simulation parameters of the two-link robot.

The desired trajectory is given as
 ${\boldsymbol{y}}_{d}=\left[\begin{array}{l} y_{1d}\\ y_{2d} \end{array}\right]=\left[\begin{array}{l} 0.4\sin\!({\Pi} t)+0.4\cos ({\Pi} t)\\ 0.6\sin\!({\Pi} t)+0.6\cos\!({\Pi} t) \end{array}\right]$
. The initial condition of the position, auxiliary system states, and the adaptive bounds are chosen as
${\boldsymbol{y}}_{d}=\left[\begin{array}{l} y_{1d}\\ y_{2d} \end{array}\right]=\left[\begin{array}{l} 0.4\sin\!({\Pi} t)+0.4\cos ({\Pi} t)\\ 0.6\sin\!({\Pi} t)+0.6\cos\!({\Pi} t) \end{array}\right]$
. The initial condition of the position, auxiliary system states, and the adaptive bounds are chosen as
 $q_{1}(0)=q_{2}(0)=0.55, \boldsymbol{\lambda }_{1}(0)=\boldsymbol{\lambda }_{2}(0)=[0;\,0], \theta _{1}(0)=\theta _{2}(0)=0.01$
, respectively.
$q_{1}(0)=q_{2}(0)=0.55, \boldsymbol{\lambda }_{1}(0)=\boldsymbol{\lambda }_{2}(0)=[0;\,0], \theta _{1}(0)=\theta _{2}(0)=0.01$
, respectively.
The control method proposed in this paper is compared with the methods in refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] and [Reference Hu, Wei, Zhang, Han and Liu37]. Simulations are conducted with various feedback gains in two cases.
5.1. Case 1. With larger gain
In case 1, the parameters in the proposed method are
 ${\boldsymbol{K}}_{1}=[2\,0;\,0\,2], {\boldsymbol{K}}_{2}=[20\,0;\,0\,20], {\boldsymbol{p}}_{1}=[2\,0;\,0\,2], {\boldsymbol{p}}_{2}=[260\,0;\,0\,260], {\boldsymbol{J}}=[440\,0;\,0\,440], \bar{{\boldsymbol{M}}}=[0.35\,0;0\,0.05], \beta =0.01, \mu =0.8$
, and
${\boldsymbol{K}}_{1}=[2\,0;\,0\,2], {\boldsymbol{K}}_{2}=[20\,0;\,0\,20], {\boldsymbol{p}}_{1}=[2\,0;\,0\,2], {\boldsymbol{p}}_{2}=[260\,0;\,0\,260], {\boldsymbol{J}}=[440\,0;\,0\,440], \bar{{\boldsymbol{M}}}=[0.35\,0;0\,0.05], \beta =0.01, \mu =0.8$
, and
 $\sigma =20$
.
$\sigma =20$
.
Figure 3 shows the control input signals in refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23, Reference Hu, Wei, Zhang, Han and Liu37] and this paper. Since the input saturation cannot be handled in ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23], it can be seen that the method in ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] generates severe chattering when the input torque reaches the saturation limit. In ref. [Reference Hu, Wei, Zhang, Han and Liu37], since an auxiliary system is developed to deal with the adverse effects of the input saturation limit, it can be seen that the input torque is smoother than that in ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23]; however, there is still chattering. The method proposed in this paper can compensate for the input saturation better by introducing the saturation deviation boundary to the auxiliary system and the adaptive law for it.

Figure 3. Control input signals.
Figures 4 and 5 show the joint position tracking and position tracking errors. From Fig. 4, it can be seen that the method in ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] becomes significantly worse in position tracking when the input saturation occurs. The position tracking performance in ref. [Reference Hu, Wei, Zhang, Han and Liu37] is improved compared with that in ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] when input saturation occurs. The method proposed in this paper can track the desired position and does not result in large position error when the input saturation occurs. Figure 5 shows that the tracking error of the proposed method converges to zero quickly, and compared with the other two methods, the position tracking error is smaller. Furthermore, the proposed method can maintain desired tracking performance when the input saturation occurs due to the effective compensation of the input saturation.

Figure 4. Position tracking.

Figure 5. Position tracking errors.
Figures 6 and 7 show the TDE error observations and the adaptive results of the saturation deviation boundary developed in this paper. One can see that the value of
 $\vphantom{\frac{1}{2}}\hat{\theta }$
of joint 1 is constantly adjusting when the input saturation occurs, while the value of
$\vphantom{\frac{1}{2}}\hat{\theta }$
of joint 1 is constantly adjusting when the input saturation occurs, while the value of
 $\hat{\theta }$
of joint 2 does not change because no input saturation occurs.
$\hat{\theta }$
of joint 2 does not change because no input saturation occurs.

Figure 6. TDE error observations in proposed method.

Figure 7. Adaptive saturation deviation boundary in proposed method.
5.2. Case 2. With smaller gain
It can be seen from Case 1 that the chattering in the controller [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] is severe with a larger control gain. Now, a smaller feedback gain is taken in Case 2 where
 ${\boldsymbol{K}}_{2}=[10\,0;\,0\,10]$
and other comparison conditions are kept unchanged. The results are shown in Figs. 8–10.
${\boldsymbol{K}}_{2}=[10\,0;\,0\,10]$
and other comparison conditions are kept unchanged. The results are shown in Figs. 8–10.

Figure 8. Control input signals.

Figure 9. Position tracking.
In Fig. 8 with smaller feedback gain, the torque chattering in refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] and [Reference Hu, Wei, Zhang, Han and Liu37] are reduced compared with Fig. 3 with larger gain. However, the reduction of chattering in refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] and [Reference Hu, Wei, Zhang, Han and Liu37] is at the cost of larger tracking errors as shown in Figs. 9 and 10 compared with Figs. 4 and 5. In contrast to refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] and [Reference Hu, Wei, Zhang, Han and Liu37], the torque in the proposed method still maintains smooth without severe chattering in Fig. 8. Meanwhile, the proposed method still achieves the optimal tracking accuracy among the three methods. Moreover, the saturation time of the proposed method is the least. Table II further shows the statistical analysis of the three methods. The index mean absolute percentage error (MAPE) is used to evaluate the tracking errors, where
 $\text{MAPE}=\displaystyle\frac{1}{\tilde{N}}\sum _{k=1}^{\tilde{N}}\left| \frac{y\left(k\right)-y_{d}\left(k\right)}{y_{d}\left(k\right)}\right| \ast 100\%, k=1,2,\ldots,\tilde{N}$
represents each sampling time.
$\text{MAPE}=\displaystyle\frac{1}{\tilde{N}}\sum _{k=1}^{\tilde{N}}\left| \frac{y\left(k\right)-y_{d}\left(k\right)}{y_{d}\left(k\right)}\right| \ast 100\%, k=1,2,\ldots,\tilde{N}$
represents each sampling time.

Figure 10. Position tracking errors.
Table II. Statistical analysis.

6. Experiments
In this section, the experiments are conducted on a Phantom Omni robot. The experimental setup is composed of a Phantom Omni robot and a computer, which is shown in Fig. 11. The robot is connected to the computer through a 1394 FireWire cable. In the experiments, the first and third joints are used (the second joint is locked for brevity). In the experiments, the proposed method is also compared with the methods in refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] and [Reference Hu, Wei, Zhang, Han and Liu37].

Figure 11. Experimental setup.

Figure 12. Control input signals.

Figure 13. Position tracking.

Figure 14. Position tracking errors.
The parameters of the controller are taken as
 ${\boldsymbol{K}}_{1}=[60\,0;\,0\,60], {\boldsymbol{K}}_{2}=[100\,0;\,0\,100], {\boldsymbol{p}}_{1}=[60\,0;\,0\,60], {\boldsymbol{p}}_{2}=[200\,0;\,0\,200]$
,
${\boldsymbol{K}}_{1}=[60\,0;\,0\,60], {\boldsymbol{K}}_{2}=[100\,0;\,0\,100], {\boldsymbol{p}}_{1}=[60\,0;\,0\,60], {\boldsymbol{p}}_{2}=[200\,0;\,0\,200]$
,
 ${\boldsymbol{J}}=[140\,0;\,0\,140]$
,
${\boldsymbol{J}}=[140\,0;\,0\,140]$
,
 $\bar{{\boldsymbol{M}}}=[0.5\,0;\,0\,0.9], \beta =0.02, \mu =0.6, \sigma =40$
. The disturbance is
$\bar{{\boldsymbol{M}}}=[0.5\,0;\,0\,0.9], \beta =0.02, \mu =0.6, \sigma =40$
. The disturbance is
 ${\boldsymbol{d}}=\left[\begin{array}{l} 3\sin (2t+0.785)\\ 3\sin\! (2t+0.785) \end{array}\right]$
, and the desired trajectory is given as
${\boldsymbol{d}}=\left[\begin{array}{l} 3\sin (2t+0.785)\\ 3\sin\! (2t+0.785) \end{array}\right]$
, and the desired trajectory is given as
 ${\boldsymbol{q}}_{d}=\left[\begin{array}{l} q_{1d}\\ q_{3d} \end{array}\right]=\left[\begin{array}{l} 0.4\sin\! ({\Pi} t)+0.4\cos\! ({\Pi} t)\\ 0.6\sin\! ({\Pi} t)+0.6\cos\! ({\Pi} t) \end{array}\right]$
. The input saturation for joint 1 and joint 3 are set as
${\boldsymbol{q}}_{d}=\left[\begin{array}{l} q_{1d}\\ q_{3d} \end{array}\right]=\left[\begin{array}{l} 0.4\sin\! ({\Pi} t)+0.4\cos\! ({\Pi} t)\\ 0.6\sin\! ({\Pi} t)+0.6\cos\! ({\Pi} t) \end{array}\right]$
. The input saturation for joint 1 and joint 3 are set as
 $\bigg\{\begin{array}{l} \tau _{1\max }=35\\ \tau _{1\min }=-60 \end{array}$
, and
$\bigg\{\begin{array}{l} \tau _{1\max }=35\\ \tau _{1\min }=-60 \end{array}$
, and
 $\bigg\{\begin{array}{l} \tau _{3\max }=75\\ \tau _{3\min }=-35 \end{array}$
.
$\bigg\{\begin{array}{l} \tau _{3\max }=75\\ \tau _{3\min }=-35 \end{array}$
.
Figures 12–16 show the experimental results of the methods in refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23, Reference Hu, Wei, Zhang, Han and Liu37] and the proposed method. The proposed method takes the TDE error and input saturation into account compared with ref. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23]. The saturation deviation boundary is introduced based on the auxiliary system in ref. [Reference Hu, Wei, Zhang, Han and Liu37] to further attenuate the negative impact of input saturation on the system. Comparing with Figs. 12–14, we can see that the proposed method can adequately cope with the effect of input saturation on position tracking when input saturation occurs and achieve accurate tracking. The control performance in the proposed method is better than those in refs. [Reference Brahmi, Saad, Ochoa-Luna, Rahman and Brahmi23] and [Reference Hu, Wei, Zhang, Han and Liu37]. The time and the position error when input saturation occurs are significantly less than those of the other two methods. The TDE error observation and the adaptive saturation deviation boundary are shown in Figs. 15 and 16.

Figure 15. TDE error observation in proposed method.

Figure 16. Adaptive saturation deviation boundary in proposed method.
In summary, the control method proposed in this paper achieves desired position tracking for robotic system with external disturbances under input saturation. It can effectively reduce the position tracking error and saturation time caused by input saturation without computing the complicated dynamics model of the robot.
7. Conclusions
This paper proposes a model-free adaptive robust control based on TDE for robot with disturbance and input saturation. TDE is adopted to estimate all the uncertainty terms and external disturbance under input saturation of the system. The TDE error observer is used to estimate the approximation errors of the nonlinear terms. The adaptive auxiliary system is developed to reduce the undesirable effects of the input saturation. The backstepping is employed to obtain the final model-free adaptive robust controller. This method does not necessitate the accurate dynamic model of the complicated system while guaranteeing the desired position tracking performance of the robot even subject to disturbance and input saturation. The validity of the proposed method is demonstrated by both simulations and experiments. Besides, fault-tolerant control for resilient robot is an interesting topic and a significant challenge [Reference Wang, Qian, Yan, Yuan and Zhang44, Reference Zhang, Zhang and Gupta45]. Therefore, how to extend our proposed method to deal with faults, disturbance, and input saturation simultaneously to ensure a safe and effective control for resilient robot needs to be further investigated.
Author contributions
Xia Liu: conceptualization (lead), review, and editing (lead), original draft (lead), funding acquisition (lead); Lu Wang: review and editing (equal), investigation (equal), software (equal); and Yong Yang: conceptualization (supporting); software (equal), and funding acquisition (equal).
Financial support
This work is supported by the National Natural Science Foundation of China under Grants 61973257 and 62003278, and the Natural Science Foundation of Sichuan Province under Grants 2023NSFSC0510 and 2023NSFSC1431.
Competing interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Ethical approval
Not applicable.


















