



1. Introduction
Over the last few decades, interest in the unmanned ground vehicle (UGV) platform has grown steadily, not only among universities but also among some vehicle manufacturers. The UGV platform usually performs tasks in an unstructured environment, except for the driverless technology. The all-terrain performance is a key factor restricting their operating efficiency and reliability. In the structured scenario, the environment perception technique has a good performance but still has some enhanced space in the unstructured environment. The new obstacle-surmounting design and structure determine the terrain mobility and adaptive limitations of the UGV platform. As a result, researching adaptive obstacle-surmounting mechanisms is critical to improving the mobility of unmanned platforms by compensating for lack of perception ability in a complex environment.
The UGV platform commonly takes the remote control or autonomous mobile vehicle as the base, equipped with operation devices to meet the needs of different application fields. Through the integration of a multi-mode walking mechanism and electromechanical hydraulic complex drive mode and control technology, the UGV platform has excellent maneuvering performance, autonomous control performance, and good adaptive ability in the aspects of driving on the regular road surface, obstacle climbing, ditch crossing, steering, and path planning. According to the land locomotion system of platforms, the UGV platform can be divided into wheeled, tracked, legged, and complex UGV platform (shown in Fig. 1). For clarity of presentation, we review each configuration separately in Section 2.

Figure 1. Classification of obstacle-surmounting unmanned ground vehicle platform.
The earliest research on the UGV platform could date back to the 1930s, the Soviet Union and Germany developed radio-controlled tanks [Reference Zaparii, Mel’nikov, Gizhevskii and Zaparii1, Reference Villar2] (shown in Fig. 2) during the world war II period, they could carry out operations like handling explosives, delivering weapons, and remote track steering over field terrain. These UGV platforms were not reliable in practical application due to limitations in information techniques, design, manufacture, their versatility, and autonomy were insufficient to meet practical application requirements. However, it has improved the conceptual design idea for the research on the UGV platform.

Figure 2. Early unmanned ground platforms: (a) the Soviet Union light tank T-26 [Reference Zaparii, Mel’nikov, Gizhevskii and Zaparii1]; (b) the Germany explosive ordnance disposal vehicle Goliath [Reference Villar2].
The first true autonomous driving unmanned ground platform was created in the late 1960s. The Defense Advanced Projects Agency (DARPA) teamed up with Stanford University to develop the indoor wheeled mobile vehicle SHAKEY [Reference Nilsson3] (shown in Fig. 3), which could make decisions about how to travel depending on information about the surroundings, making it the first generation mobile vehicle. It was equipped with ultrasonic sensors, cameras, and tactile sensors and could perform some simple tasks such as navigation, obstacle avoidance, and path planning indoors. The research realized autonomous driving from the angle of sensor and control, which laid the foundation for the development of unmanned ground platforms. Due to the limitations of computer science technology and the simple design of the driving mechanism, the vehicle was only limited to the ideal indoor environment.

Figure 3. Wheeled mobile vehicle Shakey [Reference Nilsson3].
To improve the unmanned ground platform’s off-road performance and enable it to adapt to the field’s unstructured operating environment, from the early 1980s to the late 1990s, when DARPA started some projects for instance, the Autonomous Land Vehicle (ALV) [Reference Leighty4] (shown in Fig. 4) was a 12-foot-tall, eight-wheeled robot with multiple sensors, tasked with going from point A to point B without human intervention in the hills outside of Denver. The ALV off-road speed reached 5 km/h in 1985 and increased to 10 km/h in 1989.

Figure 4. Autonomous land vehicle (ALV) [Reference Leighty4].
Then, the UGV platform developed by the United States includes Prowler (an uncrewed patrol vehicle), TOV (Teleoperated vehicle)-series remote ground vehicles, etc. These research projects were geared to outdoor road environments, using multiple sensor fusion technology, intelligent control algorithm, and other technologies. The research on the UGV platform has changed in recent years from the perceptual decision-making approach to the research of high mobility to boost the adaptability of the UGV platform in difficult terrain. Its main goal was to increase high mobility through a high-performance adaptive mechanism and its dynamic performance to compensate for UGVs’ limited capacity for autonomous perception and obstacle-crossing performance in complicated environments.
2. Research status of UGV platform
The obstacle-surmounting mechanism of an unmanned ground platform may be classified into wheeled, tracked, legged, and complex mobile types according to the design of the high-mobility system. The typical UGV platform with these configurations is introduced in this section.

Figure 5. Wheeled type UGV platform: (a) the squad mission support system(SMSS) [Reference Sabatta5]; (b) Israeli off-road platform Guardium [Reference Ni, Hu and Xiang6]; (c) the Laska 2.0 URP [Reference Nevliudov, Yanushkevych and Ivanov7]; (d) Rheinmentall Mission Master [Reference Ieva Bērziņa8].
2.1. Wheeled type UGV platform
Wheeled UGV platform is well suited for completing transportation and supply activities in a field setting because of their quick acceleration and straightforward control scheme. One classic example is the rigid suspension unmanned platform, which has a specific design but has poor high-frequency ground vibration absorption due to the absence of a suspension system.
The Squad Mission Support System (SMSS) vehicle [Reference Sabatta5] (shown in Fig. 5(a)), developed by Lockheed Martin in 2005, was a 6×6 amphibious UGV platform, within 1.7 ton weight, 3.6 m long, 1.8 m wide, and 2.1 m height. It could go past barriers that are 0.55 m deep or 1.7 m wide. Besides, it had adequate dynamic performance even if it could not alter ground clearance. The Guardium vehicle [Reference Ni, Hu and Xiang6] (shown in Fig. 5(b)), developed by Israel G-UNIUS company in 2005, was 1.4 ton weight, 2.95 m long, 1.8 m wide, and 2.2 m height. Its speed could reach 80 km/h in the off-road environment. Zaporizhzhia company Infocom had developed a robotic structure Laska 2.0 [Reference Nevliudov, Yanushkevych and Ivanov7] (shown in Fig. 5(c)), designed for patrolling, surveillance, demining, delivery of ammunition, and evacuation of the wounded. The Laska 2.0 URP was based on a 4
 $\times$
4 wheeled chassis with fixed and mobile platform configurations. Laska 2.0’s base platform was 2.27 m long, 1.3 m wide, and 0.95 m high. The amount of ground clearance of this UGV was 220 mm. In 2018, during the EUROSATORY arms exhibition, the German company Rheinmetall AG presented a relatively mature modular UGV platform demonstrator called Mission Master [Reference Ieva Bērziņa8] (shown in Fig. 5(d)), which could be used as a platform for multiple applications. It could be used for tactical surveillance, chemical, biological, radiological, and nuclear detection, medical evacuation operations, and communications relay missions. This all-terrain UGV was built on an 8
$\times$
4 wheeled chassis with fixed and mobile platform configurations. Laska 2.0’s base platform was 2.27 m long, 1.3 m wide, and 0.95 m high. The amount of ground clearance of this UGV was 220 mm. In 2018, during the EUROSATORY arms exhibition, the German company Rheinmetall AG presented a relatively mature modular UGV platform demonstrator called Mission Master [Reference Ieva Bērziņa8] (shown in Fig. 5(d)), which could be used as a platform for multiple applications. It could be used for tactical surveillance, chemical, biological, radiological, and nuclear detection, medical evacuation operations, and communications relay missions. This all-terrain UGV was built on an 8
 $\times$
8 platform that is 2.95 m long and weighs around 750 kg. In amphibious operations, it could carry up to 400 kg and had a maximum load capacity of 600 kg.
$\times$
8 platform that is 2.95 m long and weighs around 750 kg. In amphibious operations, it could carry up to 400 kg and had a maximum load capacity of 600 kg.
Furthermore, there are other studies on the UGV platforms with wheels. Lee [Reference Lee, Ryu, Kim and Seo9] proposed an angled spoke-based wheel design to enhance the driving speed of a mobile robot. Chen [Reference Chen, Wang, Zhong, Zhu, Yang and Wang10] researched an all-terrain mobile robot with a linkage suspension, and its complex kinematics and dynamic model are studied. Aaron [Reference Tan, Peiris, El-Gindy and Lang11] demonstrated the design and development of a novel custom-built, autonomous scaled multi-wheeled vehicle that features an eight-wheel drive and eight-wheel steer system. Daniel [Reference Gonzalez, Lesak, Rodriguez, Cymerman and Korpela12] presented a Four-Wheeled Independent Drive and Steering (4WIDS) robot named AGRO (Agile Ground Robot) and a method of controlling its orientation while airborne using wheel reaction torques. Nikitenko [Reference Nikitenko and Kulikovskis13] proposed an eight-wheel platform. The platform’s wheels are coupled in pairs using movable joints. Each of the joints is independent of others thus allowing to maintain excellent contact with ground or obstacles. Son [Reference Son, Shin, Kim and Seo14] demonstrated a mobile robotic platform that uses a normal wheel and a curved-spoke tri-wheel (CSTW). The normal wheel is used for driving on flat terrain, and the CSTW is used for stair climbing. Edgar [Reference Martinez-Garcia, Lerín-García and Torres-Cordoba15] developed a general kinematic control law for automatic multi-configuration of four-wheel active drive robots. Jia [Reference Jia, Cheng, Ye, Xie and Wu16] presented an amphibious soft-rigid wheeled crawling robot consisting of a soft-rigid body actuated by two soft pneumatic actuators (SPAs), four wheels, and four annular soft bladders (ASBs) as brakes. Kim [Reference Kim, Lee, Lee, Kim, Kim and Seo17] researched a new mobile platform with two degree of freedom (2-DOF) transformable wheels for service robots, which can overcome steps and stairs of various sizes encountered in indoor environments.
2.2. Tracked type UGV platform
The wheeled platform’s high grounding-specific pressure makes it vulnerable to sinking on soft surfaces. Instead, the tracked construction has a low grounding-specific pressure, making it ideal for usage in soft soil and typical in the wild [Reference Wong18]. A typical tracked type UGV platform usually includes double-track forms and multi-track ones. The double-track form is the traditional double-track walking configuration. Additionally, the multi-track one builds on the double-track design and adds a deformable mechanism that helps the platform perform better while navigating obstacles.
Foster-Miller’s TALON [Reference J.González19] (shown in Fig. 6(a)) was a remote-controlled reconnaissance platform that could be outfitted with a rifle, grenade launcher, or incendiary weapon. The system was made of several sensor components and is modular in design. It could be utilized in all terrain and environmental circumstances and had an excellent payload-to-weight ratio. A more straightforward method than the SMSS, the Titan [Reference Williams20] (shown in Fig. 6(b)), consisted of a platform supported by two diesel-electric hybrid tracks, with mission-specific controls and automation being contained in modular payload frames. The multi-mission UGV Titan could be rearranged to increase mission effectiveness. It had a cargo bay area that was 72 in by 48 in, 79 in long, 83 in broad, and 40 in high. A maximum payload of 1500 pounds was possible. The new generation of the Russian unmanned ground vehicle Uranus-9 [Reference Zhang, Fan, Wang, Zhao, Zhang and Ma21] (shown in Fig. 6(c)) had been tested on the Syrian battlefield. It could march and hunt for targets on its own. The body of the Uranus-9 was a small, track-shaped armored vehicle that was 4.5 m long, 2 m wide, and 1.4 m high. With a total weight of 10 tons, it had a top speed of 40 km/h. Additionally, it could climb barriers up to 1.2 m high. The American iRobot company developed a four-track unmanned platform Packbot [Reference Yamauchi22] (shown in Fig. 6(d)) with double swing arms. Packbot could traverse ditches and ascend stairs with its swing arm while still keeping its feet firmly planted on uneven roadways. Mourikis and Yunwang researched active obstacle-surmounting control and obstacle-surmounting kinematics mechanism of this type of platform, respectively. Their findings showed that tracked platforms with swing arms performed better while navigating obstacles [Reference Mourikis, Trawny, Roumeliotis, Helmick and Matthies23, Reference Yunwang, Shirong, Hua and Jian24]. Besides, there are other researches on tracked type UGV platform [Reference Yuting, Baoling, Qingsheng and Kailing25–Reference Hardouin27].

Figure 6. Tracked type UGV platform: (a) the Foster-Miller’s TALON [Reference J.González19]; (b) the Qinetiq Titan [Reference Williams20]; (c) Russia UGV of Uranus-9 [Reference Zhang, Fan, Wang, Zhao, Zhang and Ma21]; (d) American iRobot of Packbot [Reference Yamauchi22].
2.3. Legged type UGV platform
It is common knowledge that walking on bumpy roads is best done on wheeled or tracked platforms. However, the effectiveness of these two platforms will be much diminished in rugged hilly terrain with numerous barriers like weeds and plants. Based on the bionic mechanism of the footed animal, the legged type UGV platform can realize autonomous identification and overcome obstacles by controlling the discrete gait of the legs [Reference Ko, Chen, Li and Lin28].
To study the development of intelligent autonomous legged mobility in challenging and unstructured terrain, the LLAMA [Reference Nicholson, Jasper, Kourchians, McCutcheon, Austin, Gonzalez, Pusey, Karumanchi, Hubicki and Clark29] (shown in Fig. 7(a)) quadrupedal robotic platform was developed. The LLAMA could move at 1.2 m/s in all directions. Moreover, LLAMA could move swiftly and carry weights thanks to its revolutionary designs and specially made, customizable movement systems. ANYmal [Reference Hutter, Gehring, Jud, Lauber, Bellicoso, Tsounis, Hwangbo, Bodie, Fankhauser and Bloesch30] (shown in Fig. 7(b)) was a quadrupedal platform designed to be highly mobile and durable for autonomous operation under challenging conditions. ANYmal was created with exceptional mobility and dynamic motion capabilities, allowing it to sprint and easily climb enormous barriers. “ANYmal” denoted that the platform could move steadily and any place to assist people in hazardous industrial settings. Atlas [Reference Nelson, Saunders and Playter31] (shown in Fig. 7(c)), a bipedal humanoid robotic platform created by Boston Dynamics, had a stable control strategy and environmental awareness technologies that enabled it to carry objects and execute movements like climbing stairs and leaping. Additionally, in certain unique situations, it could do tasks that people would typically perform. MIT researched the quadrupedal robotic platform named Cheetah [Reference Park, Wensing and Kim32] (shown in Fig. 7(d)), which had real-time planning of gait through model predictive control based on force feedback. It had excellent real-time control capabilities and can react swiftly to ongoing impediments like stairs and walking patterns.
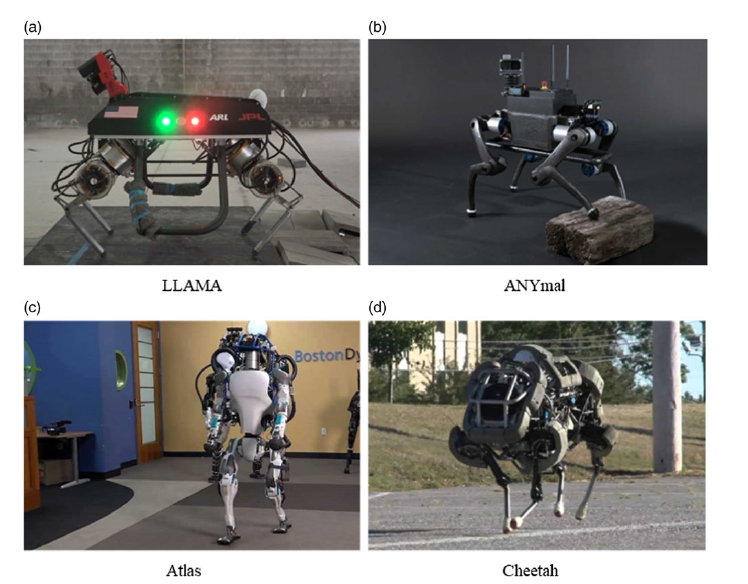
Figure 7. Legged type UGV platform: (a) the quadrupedal robotic platform LLAMA [Reference Nicholson, Jasper, Kourchians, McCutcheon, Austin, Gonzalez, Pusey, Karumanchi, Hubicki and Clark29]; (b) the quadrupedal robotic platform ANYmal [Reference Hutter, Gehring, Jud, Lauber, Bellicoso, Tsounis, Hwangbo, Bodie, Fankhauser and Bloesch30]; (c) the bipedal humanoid robotic platform Atlas [Reference Nelson, Saunders and Playter31]; (d) the quadrupedal robotic platform Cheetah [Reference Park, Wensing and Kim32].
There are other research on UGV platforms with legs as well. Dennis [Reference Goldschmidt, Hesse, Wörgötter and Manoonpong33] developed a neural control mechanism for hexapod robots which generates basic walking behavior and especially enables them to effectively perform reactive climbing behavior. Xiong [Reference Xiong and Ames34] presented the design and validation of controlling hopping on the 3D bipedal robot Cassie. A spring-mass model is identified from the kinematics and compliance of the robot. In ref. [Reference Ficht and Behnke35], a comprehensive review of the technologies crucial for bipedal humanoid robots was performed. Different mechanical concepts have been discussed, along with the advancements in actuation, sensing, and manufacturing. Liu [Reference Liu, Shen, Zhang, Zhang, Zhu and Hong36] researched a miniature bipedal robot named Bipedal Robot Unit with Compliance Enhanced (BRUCE). Each leg of BRUCE has five degrees of freedom (DoFs), which includes a spherical hip joint, a knee joint, and an ankle joint. In ref. [Reference Yöngül and Kavlak37], an eight-legged spider type mobile robot was designed. Klann type walking mechanism with one degree of freedom has been designed for the robot to overcome the obstacles and move in a balanced way. In ref. [Reference Kavlak and Kartal38], the ideal coupler curve was drawn using the “Cinderalla” program for the mobile robot with “Strandbeest” walking mechanism to move on a smooth surface and the link distances that provided this curve were determined. Huang [Reference Huang and Grizzle39] demonstrated a reactive planning system for bipedal robots on unexplored, challenging terrains. Daniel [Reference Blackman, Nicholson, Ordonez, Miller and Clark40] explored improvements to both physical and control methods to a quadrupedal system in order to achieve fast, stable walking, and trotting gaits. Kiss [Reference Kiss, Gonen, Mo, Buchmann, Renjewski and Badri-Spröwitz41] developed a 0.49 m tall, 2.2 kg anthropomorphic bipedal robot. Roennau [Reference Roennau, Heppner, Nowicki and Dillmann42] presented the design and development of the new six-legged walking robot with its improved kinematics and robust mechanical structure. Katz [Reference Katz, Di Carlo and Kim43] proposed a small and inexpensive, yet powerful and mechanically robust quadruped robot, intended to enable rapid development of control systems for legged robots. Ding [Reference Ding, Pandala, Li, Shin and Park44] researched a novel representation-free model predictive control (RF-MPC) framework for controlling various dynamic motions of a quadrupedal robot in three-dimensional (3D) space. Dettmann [Reference Dettmann, Planthaber, Bargsten, Dominguez, Cerilli, Marchitto, Fink, Focchi, Barasuol, Semini and Marc45] demonstrated a navigation and locomotion control system that enables legged robots to be able to perceive the terrain, to plan a path to a desired goal, and to control the path execution while traversing unconsolidated, inclined, and rugged terrain. Hendrik [Reference Kolvenbach, Hampp, Barton, Zenkl and Hutter46] explored a 22 kg quadruped robot exploits lunar gravity conditions to perform energy-efficient jumps. The robot achieves repetitive, vertical jumps of more than 0.9 m and powerful single leaps of up to 1.3 m. Kolvenbach [Reference Kolvenbach, Arm, Hampp, Dietsche, Bickel, Sun, Meyer and Hutter47] presented experimental work on traversing steep, granular slopes with the dynamically walking quadrupedal robot.
2.4. Complex mobile type UGV platform
Legged type UGV platforms have a better capacity to adapt to rough terrain. Still, their motion mechanism must be built on a complicated control algorithm, which raises more complex computer configuration requirements. A novel configuration known as the wheel-leg complex mobile type platform [Reference Conduraru, Doroftei and Conduraru48] was created by fusing the fast speed of the wheeled type platform with the potent obstacle-surmounting abilities of the legged type platform. It has become a hub for UGV platform research because of its excellent mobility and adaptability. Deformable and non-deformable platforms are both included in the wheel-leg complex mobile type UGV platform, generally speaking. The deformable one alludes to the platform’s changing configuration being realized in the shape of a transmission mechanism. Next, the structural adjustment between the leg and the wheel is made following the characteristics of the terrain. In contrast, the non-deformable one relates to the selection of the structural form. Passive adaptive or attitude control will also change postures. It is often a non-deformable platform in the field of UGV platform to reduce the complex mechanism and increase dependability.
The Federal Institute of Technology in Lausanne (EPFL) researched the wheel-leg complex mobile type platform Shrimp [Reference Siegwart, Lamon, Estier, Lauria and Piguet49] (shown in Fig. 8(a)) based on a parallel four-bar suspension. The redundant link mechanism’s purpose was to maintain all-terrain contact with the ground. While doing so, it could navigate obstacles by modifying the front wheel fork’s spatial location. Its dead weight was merely 3.1 kg, but the obstacle’s maximum height was almost double that of the wheel. Tencent Robotics X laboratory proposed a novel wheel-leg complex mobile type platform Ollie [Reference Wang, Cui, Zhang, Lai, Zhang, Chen, Zheng, Zhang and Jiang50] (shown in Fig. 8(b)), which was composed of one floating-based body, two legs ending with active wheels, and one balancing tail ending with a passive revolution. Ollie was capable of using both his legs and wheeled vehicles. The wheeled frame traveled quickly and efficiently, and the portion helped it to adjust to rough terrain. The latest incarnation of ANYmal was named Swiss-Mile [51] (shown in Fig. 8(c)). Like the original ANYmal, Swiss-Mile had four legs. Additionally, these legs had wheels affixed to them for rolling and walking. It could still walk like a quadruped by locking the wheels on the ends of those legs when necessary. These three-wheeled, three-leg complex mobile platforms were highly mobile and terrain-adaptable. It could thus be used in a variety of domains, including space robotics. TALBOT [Reference Guo, Qiu, Xu and Wu52] (shown in Fig. 8(d)) was a tracked-leg transformable robot. To adapt to any terrain, the robot can convert between the tracked and legged modes thanks to its original tracked-leg transformable structure. Talbot is controlled in tracked mode via the technique of differential speed between the two tracked feet. In order to generate and convert gait, TALBOT is controlled in the legged mode using a bionic control technique of the central pattern generator. A revolutionary wheel-legged UGV known as “Dragon Horse” [Reference Miaolei, He, Ren and He53] (shown in Fig. 8(e)) was presented. The obstacle-surmounting strategy was inspired by a horse crossing the fence. The platform included four swinging, horse-like arms that enabled the UGV to quickly climb a vertical barrier by carefully organizing the position of its components. Equipped with a hydraulic drive system, the Horse Dragon had outstanding cargo capacity and enough power to handle a climbing scenario. Ascento [Reference Klemm, Morra, Salzmann, Tschopp, Bodie, Gulich, Küng, Mannhart, Pfister, Vierneisel, Weber, Deuber and Siegwart54] (shown in Fig. 8(f)) was a two-wheeled balancing robot with the ability to move swiftly over flat terrain and jump over obstacles. The mechanical design of the system, which was 3D-printed and topology-optimized, had proven to be both light and impact-resistant.

Figure 8. Complex mobile type UGV platform: (a) EPFL wheel-leg type platform Shrimp [Reference Siegwart, Lamon, Estier, Lauria and Piguet49]; (b) Tencent Robotics X laboratory Ollie [Reference Wang, Cui, Zhang, Lai, Zhang, Chen, Zheng, Zhang and Jiang50]; (c) the latest incarnation of ANYmal: Swiss-Mile [51]; (d) tracked-leg transformable robot platform TALBOT [Reference Guo, Qiu, Xu and Wu52]; (e) a horse inspired eight-wheel ugv Dragon Horse [Reference Miaolei, He, Ren and He53, Reference He, Ren, He, Wu, Zhao, Wang and Wu55]; (f) wheel-leg jumping robot platform Ascento [Reference Klemm, Morra, Salzmann, Tschopp, Bodie, Gulich, Küng, Mannhart, Pfister, Vierneisel, Weber, Deuber and Siegwart54].
Furthermore, there are other researches on complex-type UGV platforms as follows. In ref. [Reference Lim, Ryu, Won and Seo56], a modified rocker-bogie mechanism that improves mobility using only two actuators and a damper is proposed. Choi [Reference Choi, Kim, Jung, Kim and Kim57] suggested a new performance metric for a mobile platform called as a posture variation index to evaluate the smoothness of its movement, which is an important factor in predicting undesired oscillations or shocks on a mobile platform while traveling on rugged terrain. Avinash [Reference Siravuru, Shah and Krishna58] discussed the development of an optimal wheel-torque controller for a compliant modular robot. The wheel actuators are the only actively controllable elements in this robot. For this type of robot, wheel-slip could offer a lot of hindrances while traversing on uneven terrains. Tobias [Reference Klamt and Behnke59] proposed a navigation planning method that generates hybrid locomotion paths. The planner chooses the driving mode whenever possible and takes into account the detailed robot footprint. Fahad [Reference Raza, Zhu and Hayashibe60] presented a control framework to improve the stability and robustness of an underactuated self-balancing wheel-legged robot using its upper limb arm. Edo [Reference Jelavic, Farshidian and Hutter61] demonstrated a combined sampling and optimization-based planning approach that can cope with challenging terrain. The sampling-based stage computes whole-body configurations and contact schedule, which speeds up the optimization convergence. Munzir [Reference Zafar, Hutchinson and Theodorou62] addressed a whole-body control framework for Wheeled Inverted Pendulum (WIP) Humanoids. WIP Humanoids are redundant manipulators dynamically balancing themselves on wheels. Victor [Reference Klemm, Morra, Gulich, Mannhart, Rohr, Kamel, de Viragh and Siegwart63] presented a hierarchical whole-body controller leveraging the full rigid body dynamics of the wheeled bipedal robot Ascento. In ref. [Reference Sun, Zhang, Li, Shi and Wang64], a novel articulated wheel-legged forestry chassis is presented. To balance the terrain mobility and stability, a serial suspension system which is a combination with the active four-bar linkage articulated suspension and passive V shape rocker-bogie is proposed. In ref. [Reference Kameduła and Tsagarakis65], a reactive control scheme that exploits wheels steering and robot articulated legs is proposed to continuously adjust the robot support polygon in response to unknown disturbances. Marko [Reference Bjelonic, Sankar, Bellicoso, Vallery and Hutter66] researched an online trajectory optimization framework for wheeled quadrupedal robots capable of executing hybrid walking-driving locomotion strategies. In ref. [Reference Xin, Chai, Li, Rong, Li and Li67], a whole-body dynamic model is built. It consisted of the torso dynamic model, the wheel-leg dynamic model, and the contact force constraint between the wheels and the ground. Pico [Reference Pico, Park, Luong, Medrano and Moon68] presented a mobile robot for delivery services that use laser scanning sensors to recognize the local geometry of the terrain, using the contact angle parameter that gives information regarding the surface that the wheel touches the ground. Sun [Reference Sun, You, Zhao, Adiwahono and Chew69] proposed a control framework to tackle the hybrid locomotion problem of wheeled-legged robots. Medeiros [Reference Medeiros, Jelavic, Bjelonic, Siegwart, Meggiolaro and Hutter70] demonstrated a trajectory optimization formulation for wheeled-legged robots that optimizes over the base and wheels’ positions and forces and takes into account the terrain information while computing the plans. Viragh [Reference de Viragh, Bjelonic, Bellicoso, Jenelten and Hutter71] addressed a trajectory optimizer for quadrupedal robots with actuated wheels. Du [Reference Du, Fnadi and Benamar72] developed a more general dynamics controller to generate whole-body behaviors for a quadruped-on-wheel robot.
Table I is summarized to present the worldwide research status of UGV platforms.
Table I. Summary of worldwide research status of UGV platforms.

3. Research status of obstacle-surmounting mechanism and its performance
The UGV platform’s working environment is typically unstructured and full of obstacles, including vertical walls, ditches, slopes, smooth pavements, and wading regions. The obstacle-surmounting mechanism is the fundamental factor that restricts the terrain mobility of the UGV platform. As a result, the obstacle-surmounting process has been the subject of pertinent study from several research organizations.
3.1. Overview of a typical obstacle-surmounting mechanism
According to the type of interaction with the ground, typical obstacle-surmounting techniques are often categorized into continuous and discrete mechanisms. Continuous mechanism, which is often based on wheeled and tracked designs, refers to a walking mechanism that keeps continuous contact with the ground. Meanwhile, discrete mechanisms, which are often based on leg shape, are in discrete contact with the ground.
The articulated mechanism moves like an inchworm and has degrees of freedom for pitch and roll. On sloping roads, it performs superbly in terms of contact retention. Nowadays, all-terrain mobile platforms with articulated mechanisms are frequently utilized in tandem. The University of Paris VI (UPMC) developed a three-body couple-wheeled robot RobuROC6 [Reference Lucet, Grand, Sallé and Bidaud73] (shown in Fig. 9(a)) with a hydraulic cylinder and roll joint. The hydraulic cylinder’s telescopic drive propelled the robot’s pitching motion, enabling obstacle crossing. The roll joint was a weakly actuated joint that could automatically adjust to challenges like ground depressions or bumps. Sunward Intelligent Equipment Company and Central South University applied the hydraulic articulation mechanism to the heavy-duty UGV platform, which developed a two-body articulated serial unmanned platform named “Longma No.1” [Reference Zhou, He, Ren, Zhao and Peng74] (shown in Fig. 9(b)). The obstacle-surmounting height of this platform could reach 1.5 times the tire’s diameter. The Shenyang Institute of Automation, Chinese Academy of Sciences, and Beihang University applied the articulated mechanism to the tracked robot [Reference Li, Wang, Ma, Li and Wang75, Reference Wang, Yu and Zhang76] (shown in Fig. 9(c,d)). They created a reconfigurable robot with the ability to adapt to the ground environment and modify its overall design in response to the terrain.
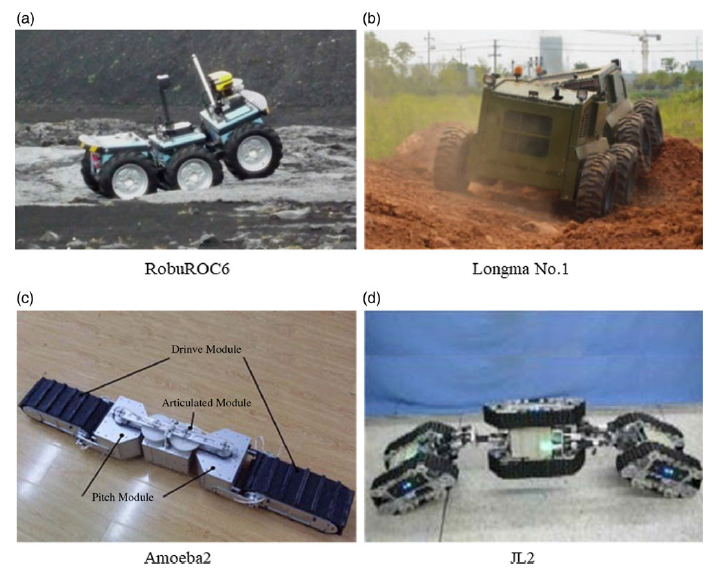
Figure 9. Articulated mechanism type UGV platform: (a) UPMC three-body tandem wheeled robot RobuROC6 [Reference Lucet, Grand, Sallé and Bidaud73]; (b) two-body articulated serial unmanned platform Longma No.1 [Reference Zhou, He, Ren, Zhao and Peng74]; (c) a transformable tracked robot Amoeba2 [Reference Li, Wang, Ma, Li and Wang75]; (d) a mobile multi-robot system JL2 [Reference Wang, Yu and Zhang76].
In addition, the Japan Defense University proposed a wheeled platform based on a complex wheel sets mechanism [Reference Takita, Shimoi and Date77] (shown in Fig. 10(a)). Using planetary gears or hydraulic actuators, the independent wheels were joined together to create wheel sets, increasing the wheel diameter in a theoretical enveloping and enhancing obstacle-surmounting performance. The rocker arm suspension system [Reference Thueer, Krebs and Siegwart78, Reference Alamdari and Krovi79] (shown in Fig. 10(b)) could keep complete contact with the ground on bumpy roads and adjust to terrain characteristics since it was an underactuated mechanism. As a result, planetary exploration spacecraft frequently deployed it. This design had been investigated and used by several research organizations worldwide. Mechanism and transmission mechanics concepts were used to achieve changeable structural behavior in the deformable obstacle-surmounting mechanism. To increase versatility, multiple setup strategies were used for various terrains. Deformable wheel [Reference She, Hurd and Su80, Reference Sun, Xiang, Su, Wu and Song81] (shown in Fig. 10(c)) based on the crank-slider principle researched by Ohio State University and Tianjin University, which could convert from a wheeled configuration to a legged design when obstacle-surmounting. The ability to obstacle-surmounting significantly improved. Additionally, research organizations have put forward various bionic obstacle-surmounting processes based on researching animals’ motion mechanisms and their capacity to adapt to multiple terrains in the field. The classic example was a crawling robot powered by electromagnetic forces that mimics the movements of inchworms [Reference Lee, Kim, Paik and Shin82] (shown in Fig. 10(d)).

Figure 10. Other typical obstacle-surmounting mechanism: (a) a complex wheel sets mechanism [Reference Takita, Shimoi and Date77]; (b) a rocker arm suspension mechanism [Reference Thueer, Krebs and Siegwart78, Reference Alamdari and Krovi79]; (c) a deformable Mechanism [Reference She, Hurd and Su80, Reference Sun, Xiang, Su, Wu and Song81]; (d) an inchworm mechanism [Reference Lee, Kim, Paik and Shin82].
The direction of research in obstacle-surmounting mechanisms progresses from the general-purpose, mobile obstacle-surmounting tool with large load capacity to the micro-miniature agent at the practical level.
3.2. Research status of obstacle-surmounting performance
Analysis of the mathematical and physical model of the UGV platform’s kinematics and dynamic performance across obstacles is referred to as obstacle-surmounting performance. The UGV platform’s ability to overcome obstacles is then objectively examined. The essential elements that determine the performance of obstacle-surmounting are kinematics and dynamic performance; hence, research on the obstacle-surmounting version of the UGV platform primarily focuses on the following aspects:
3.2.1. Mechanism of centroid movement in obstacle-surmounting
The UGV platform’s method of overcoming obstacles involves moving across space. The centroid must reach the location of the obstacle height to realize the obstacle surmounting [Reference Pijuan, Comellas, Nogués, Roca and Potau83, Reference Wang, Du and Sun84]. The centroid position has an impact on the obstacle-surmounting performance. When the centroid position reaches the height of obstacle, the surmounting process is finished. Since the centroid position of the “Dragon Horse” would change with the motion of swing arms, He [Reference He, Ren, He, Wu, Zhao, Wang and Wu55] studied the centroid kinematic model of the UGV “Dragon Horse” (shown in Fig. 11). Based on the walking control stability of bipedal robots, Yao [Reference Yao, Wang, Yao, Ding and Xiao85] proposed a speed-tracking control strategy based on the motion state of the centroid. Controlling the centroid’s displacement output would enable steady walking to occur. This study demonstrated the effect of centroid control on the stability of platform motion.

Figure 11. Centroid kinematic model of the UGV “Dragon Horse” [Reference He, Ren, He, Wu, Zhao, Wang and Wu55].
3.2.2. Dynamics performance of obstacle-surmounting
The ideal condition of the ground is typically used as the foundation for the kinematics study of an UGV platform. But in practice, the state of slippage, instability, flameout, etc., will occur inevitably. It depends on many factors, such as ground adhesion coefficient and platform power. Therefore, the dynamic performance determines whether an obstacle may be efficiently overcome. Based on kinematics, Zhu [Reference Yan, Minghui and Hui86] took into account the slip factor. The dynamic constraint relation for obstacle-surmounting was derived by utilizing the quasi-static dynamic model of the obstacle-surmounting process. Additionally, more precisely measure the crawler robot’s capability of overcoming obstacles. In ref. [Reference Miaolei, He, Ren and He53], to guarantee the “Dragon Horse” had the maximum ability of obstacle surmounting, the authors performed a dynamic analysis of surmounting an obstacle. There was an assumption that the surmounting process was slow, and the process could be divided into two main stages (shown in Fig. 12). In the study of the obstacle-surmounting capability of a light-weight six-wheeled UGV platform, Dabrowska [Reference Dąbrowska87] abstracted the tire as a discrete spring-loaded damping element, connected by a limited quantity of spheres. These discrete spheres would pulsate in contact with the ground, which was described as simulating the elastic deformation effect of the tire. Consequently, it could affect the dynamic performance of obstacle-surmounting more accurately.

Figure 12. Obstacle-surmounting dynamics model of the UGV “Dragon Horse” [Reference Miaolei, He, Ren and He53, Reference He, Ren, He, Wu, Zhao, Wang and Wu55]: (a) adaptation process; (b) crossing process.
3.2.3. Research on stability of obstacle-surmounting
Instability or even overturning will inevitably occur during obstacle-surmounting, given several elements, including the speed, adhesion coefficient, centroid position, and configuration characteristics of the unmanned ground platform. Numerous research organizations have investigated the stability and control of obstacle surmounting. Aiming at the stability of crawler robots when climbing stairs, Rao [Reference Rao, Shi and Wang88] of the Beijing Institute of Technology proposed a dynamic stability criterion based on multi-point contact. Then, using numerical simulation to study the impact of acceleration on traction force and support force, the logic of this stability criterion was confirmed. Aiming at the stability of off-road vehicles on rough roads, Mann [Reference Mann and Shiller89] proposed maximum speed and acceleration stability measures. Additionally, the stability margin was estimated using the acceptable range of speed and acceleration based on the quasi-3D model.
3.2.4. Autonomous motion planning and control of obstacle-surmounting
Many UGV platforms presently overcome obstacles via line-of-sight remote control due to the complexity of the obstacle-surmounting process. However, autonomous obstacle-surmounting is crucial for enhancing its effectiveness of obstacle-surmounting. Numerous academic organizations have investigated autonomous obstacle-surmounting as intelligent technology has advanced. Motion planning and obstacle detection are fundamental technologies [Reference Qiao, Zhong, Chen and Wang90, Reference Su, Qi, Hu, Karimi, Ferrigno and De Momi91]. Lim [Reference Lim, Kang, Yoon, Lee and Kang92] of the Korea Academy of Science and Technology proposed an obstacle classification and scene management algorithm for a 6
 $\times$
6 unmanned ground platform in an unstructured environment, which could automatically obtain the critical point information of obstacles to construct terrain parameters. The platform could then carry out autonomous obstacle-surmounting by the obstacle information (shown in Fig. 13). Obstacle movement for wall-climbing robots, Li [Reference Li and Fu93] from the Chinese Academy of Sciences analyzed the geometric constraints of the obstacle-surmounting robot. Then, a motion planning system based on genetic algorithms was developed to overcome obstacles.
$\times$
6 unmanned ground platform in an unstructured environment, which could automatically obtain the critical point information of obstacles to construct terrain parameters. The platform could then carry out autonomous obstacle-surmounting by the obstacle information (shown in Fig. 13). Obstacle movement for wall-climbing robots, Li [Reference Li and Fu93] from the Chinese Academy of Sciences analyzed the geometric constraints of the obstacle-surmounting robot. Then, a motion planning system based on genetic algorithms was developed to overcome obstacles.

Figure 13. Autonomous obstacle-surmounting algorithm [Reference Lim, Kang, Yoon, Lee and Kang92].

Figure 14. Mobility assessment of various action system configurations: (a) wheeled type UGV platform assessment of mobility; (b) tracked type UGV platform assessment of mobility; (c) legged type UGV platform assessment of mobility; (d) complex mobile type UGV platform assessment of mobility.
4. Qualitative comparison of obstacle-surmounting mechanism
Through a comprehensive analysis of typical UGV platform with different configurations, such as wheeled, legged, tracked, and complex. We established a qualitative analysis diagram of the layout of the action system based on literature [Reference Bruzzone and Quaglia94] (shown in Fig. 14). The area colored in Fig. 14 is more uniform, and the better performance of the corresponding configuration. Thus, we can draw the points from the Fig. 14 as follow:
-
1. Fig. 14(a) presents that wheeled type UGV platform tend to be faster and more energy-efficient since they often have ball bearings and fewer spinning pairs. The wheeled form, nevertheless, lacks auxiliary mechanisms when in contact with relatively high barriers, making its movement on rough terrain poor.
-
2. Large ground contact areas provided by the tracked type UGV platform filter out terrain roughness and reduce contact pressure. Still, the energy efficiency is decreased owing to the numerous rotary joint connections and complex mechanical transmission system.
-
3. The legged UGV platform exhibits superior adaptability while traversing challenging terrain due to its unique gait and increased range of motion. However, the energy efficiency is decreased because the leg design often contacts the ground, and the excitation joint requires torque distribution.
-
4. It is evident that the complex mobile type UGV platform has an overall superiority over other configurations. In other words, the hybrid mobile structure is more favorable for maneuvering operations in the wild environment.
5. Challenges
As science and technology have advanced, a previously unheard-of intelligence wave has hit every aspect of human civilization thanks to the extensive development of innovative applications of artificial intelligence. UGV platform has the characteristics of automatic control and high brightness. They frequently can access places that are difficult for or highly hazardous to human-crewed vehicles to enter. For this reason, the world’s leading nations are vying for control of the intelligent field’s commanding heights thanks to UGV platforms’ superior technological performance.

Figure 15. Soft and bionic UGV platform: (a) 3D soft robotic snake [Reference Wan, Sun, Qin, Skorina, Gasoto, Luo, Fu and Onal117]; (b) soft 3D-printed pneumatic actuator with bellows [Reference Drotman, Ishida, Jadhav and Tolley110]; (c) OSCAR [Reference Angatkina, Alleyne and Wissa114]; (d) deformation driven closed chain soft mobile robot [Reference Johnsen and Tsukagoshi112].
As mentioned in the literature review, the challenges of the current UGV platforms are summarized as follows:
-
1. Large UGV platform has strong power but a complicated transmission mechanism with a colossal platform, which results in little movement. Meanwhile, small UGV platforms have a tiny size but an insufficient load capacity and slow movement, which cannot perform fast maneuvers over long distances.
-
2. To some extent, there are many advantages to the wheeled type of UGV, such as high speed, ease of control, perfect energy efficiency, etc. But it cannot adapt to all-terrain unstructured environments.
-
3. Most of the existing UGV platforms have relatively single functions and weak versatility, leading to high costs.
-
4. Considering the power of the UGV platform, although driven by an engine with solid management and reliability outdoors, the transmission mechanism is complicated and takes up space, leading to inflexible movements. Meanwhile, driven by a motor has a quick response speed with a little volume. However, it is not suitable for long-distance operations.
-
5. Referring to the wheel configuration, the existing wheels are mostly rubber circular construction. Similar wheels cannot adapt outdoors to rugged, soft, and other complex terrains.
For all of these scenarios, based on our research experiences on different kinds of robot [Reference Miaolei, He, Ren and He53, Reference He, Ren, He, Wu, Zhao, Wang and Wu55, Reference Miaolei and He95–Reference Zhou, He, Chen, Li, Jiang, Ji and He103], it is foreseeable that the future trends of UGV platform can be discussed in several aspects:
-
1. Reducing the cost of robots, complex mobile type UGV platform will be the most suitable solution [Reference He, Ren, He, Wu, Zhao, Wang and Wu55, Reference Fan and Ruan104–Reference Wang, Chen, Xu, Wang, Wang and Li108]. In addition, UGVs with high maneuverability will become a significant trend. On the one hand, these UGVs both have the characteristics of high speed and perfect stability. Moreover, it has a strong load capacity and flexible motion control.
-
2. Soft and bionic will be another trend of the UGV platform in the future [Reference Liu, Wang, Wang, Fei and Du109–Reference Su, Qi, Yang, Sandoval, Ferrigno and De Momi121] (shown in Fig. 15). The UGVs usually perform tasks in an unstructured environment. Hence, the all-terrain performance becomes a key factor restricting their operating efficiency and reliability.
-
3. Modular design will also become the development trend of future UGV platform [Reference Ceccarelli, Cafolla, Russo and Carbone122, Reference Cafolla, Russo and Ceccarelli123]. In other words, reconfigurable will be a trend of UGV platform in the future [Reference Shachaf, Inbar and Zarrouk124–Reference Cui, Sun, Tian, Xu and Kou129] (shown in Fig. 16). It can improve the maintainability of UGV platform significantly. All in all that is one platform for many purposes.
-
4. Hybrid power will also become a trend of future UGV platform. Hybrid power combines the engine’s outdoor reliability with the motor’s fast response. Estonia’s MILREM’s THEMIS tracked modular platform has the integrated design of a hybrid diesel engine, battery, motor, and related electronic control part [Reference Hou, Yang and Xie130].
-
5. Adaptive wheels will become a trend of future UGV platform, which can adapt to all-terrain unstructured environments outdoors. DARPA had announced a “Reconfigurable Wheel/ Rail” that can be switched freely between triangular tracked wheels and wheels [131].
-
6. A cooperative multiple UGV platforms will be among the most comprehensive research topics in the future [Reference Zhu, Adouane and Quilliot132, Reference Liu, Anavatti, Garratt and Abbass133]. Multiple UGV platforms often collaborate and accomplish challenging tasks, so the collaborative obstacle-surmounting capability becomes a major obstacle to their operational effectiveness and dependability.
-
7. With the development of artificial intelligence technology, multi-sensor fusion perception technology will help robot to be capable of perceiving the obstacle in different dimensions, which will also be a potential research trend in the future.

Figure 16. Reconfigurable UGV platform: (a) reconfigurable wave robot [Reference Shachaf, Inbar and Zarrouk124]; (b) reconfigurable robotic base [Reference Pankert, Valsecchi, Baret, Zehnder, Pietrasik, Bjelonic and Hutter128].
6. Conclusions
This article has argued the research status of the UGV platform, considering both obstacle-surmounting mechanism and obstacle-surmounting performance, to provide valuable instructions for the early design stage when the type of motion mechanism needs to be selected according to the operation requirements.
Consequently, the four main configurations (wheeled, tracked, legged, and complex) have been discussed in this article. With a discrete gait and the mechanism having more freedom of movement, the legged configuration has perfect adaptability when running on rough terrain. However, moment distribution is required to excite joints, and the frequent impact from the ground, the energy efficiency of legged configuration will be reduced. On the one hand, the tracked structure has a large ground contact area, which can filter the terrain roughness and reduce the contact pressure. On the other hand, the tracked parts are connected by a large number of rotating pairs which will reduce the energy efficiency. Wheeled configuration is usually equipped with ball bearings of fewer rotating pairs, so it has the characteristics of fast speed and high energy efficiency. However, due to the lack of an auxiliary mechanism of wheeled configuration, its maneuverability in rugged terrain is weak when in contact with relatively high obstacles. Combining the three formats can realize the composition of the action system with super all-around performance.
Ultimately, future trends in obstacle-surmounting UGV platform are also briefly discussed. The UGV platform will adopt a modular design and be capable of adapting to all-terrain unstructured environments with high maneuverability in the future.
Author contributions
Miaolei HE proposed the research. Xiangdi Yue wrote the manuscript, and other authors conceived the article.
Financial support
This work was supported by the Natural Science Foundation of Hunan Province, China, 2021JJ40353; the National Innovation and Entrepreneurship Training Program of China, 202210542043; the Natural Science Foundation of Zhejiang Province, China, LQ23E050015; the Youth Program of National Natural Science Foundation of China, 61903138.
Conflicts of interest
The authors declare none.



















