1. Introduction
In reliability theory and survival analysis, it is of eternal interest to explore the stochastic properties of the system. Since Barlow and Proschan [Reference Barlow and Proschan1] has been devoted to investigating and enhancing the reliability of the system, a great deal of scholars and engineers have paid their attentions on reliability engineering in the past decades. As two important system structures in reliability theory and engineering, the parallel and series systems have been studied comprehensively, interested readers may refer to Boland et al. [Reference Boland, El-Neweihi and Proschan6], Singh and Misra [Reference Singh and Misra41], Hu and Wang [Reference Hu and Wang25], Da et al. [Reference Da, Ding and Li11], Navarro and Spizzichino [Reference Navarro and Spizzichino38], Yan et al. [Reference Yan, Da and Zhao47], Yan and Luo [Reference Yan and Luo45], Chen et al. [Reference Chen, Zhang and Zhao7], Fang and Wang [Reference Fang and Wang20], Kundu et al. [Reference Kundu, Hazra and Nanda29], Yan and Wang [Reference Yan and Wang46], Majumder et al. [Reference Majumder, Ghosh and Mitra36] and the reference therein. Some researchers also focus on the optimal allocation of components for  $k$-out-of-
$k$-out-of- $n$ systems and the general coherent systems, refer to Bhattacharya and Samaniego [Reference Bhattacharya and Samaniego5], Li and Ding [Reference Li and Ding32], Ding and Li [Reference Ding and Li15], You et al. [Reference You, Fang and Li50], Zhang [Reference Zhang51], Ding et al. [Reference Ding, Fang and Zhao16], Ling and Wei [Reference Ling and Wei34], Guo et al. [Reference Guo, Zhang and Yan23], Torrado [Reference Torrado44] and Yan et al. [Reference Yan, Zhang and Zhang49].
$n$ systems and the general coherent systems, refer to Bhattacharya and Samaniego [Reference Bhattacharya and Samaniego5], Li and Ding [Reference Li and Ding32], Ding and Li [Reference Ding and Li15], You et al. [Reference You, Fang and Li50], Zhang [Reference Zhang51], Ding et al. [Reference Ding, Fang and Zhao16], Ling and Wei [Reference Ling and Wei34], Guo et al. [Reference Guo, Zhang and Yan23], Torrado [Reference Torrado44] and Yan et al. [Reference Yan, Zhang and Zhang49].
A parallel–series system may be regarded as a number of series subsystems connected in parallel. Similarly, a series–parallel system may be considered as a number of parallel subsystems arranged by series. Many scholars and engineers devoted themselves to improving the reliability of the parallel–series or series–parallel systems, the main topic of this line is how to allocate the components to different positions of the systems can construct the parallel–series or series–parallel systems with high-level reliability performance? El-Neweihi et al. [Reference El-Neweihi, Proschan and Sethuraman19] studied the optimal allocation of components to parallel–series and series–parallel systems by majorization order and Schur-convex function. Laniado and Lillo [Reference Laniado and Lillo30] developed the optimal allocation policy of components in two-parallel–series and two-series–parallel systems with two types independent components and independent subsystems, under the assumption that there are components in one subsystem whose lifetimes are independently and identically distributed random variables, and the lifetimes of the components in the other subsystem are independently and identically distributed random variables but with different distribution functions. Ling et al. [Reference Ling, Wei and Li35] established the stochastic comparison of the independent heterogeneous components grouping in series–parallel and parallel–series systems. Fang et al. [Reference Fang, Balakrishnan and Jin21] investigated the optimal allocation policy of the dependent heterogeneous components of series–parallel and parallel–series systems under Archimedean copula dependence. For more relevant studies in the parallel–series and series–parallel systems, one can refer to Tavakkoli-Moghaddam et al. [Reference Tavakkoli-Moghaddam, Safari and Sassani43], Dao et al. [Reference Dao, Zuo and Pandey12], Feizabadi and Jahromi [Reference Feizabadi and Jahromi22] and Sun et al. [Reference Sun, Li and Zio42].
To the best of our knowledge, the optimal allocation policy for two-parallel–series and two-series–parallel systems with dependent subsystems has not been touched yet. In practice, due to the difference of production process and production technology, the lifetimes of different components from the same type are almost heterogeneous, and subsystems usually operate in the same environment or share the same load, thus, the operation of subsystems are dependent. In this paper, we assume that all components are independent and heterogeneous, and the lifetimes of two subsystems are dependent, consider the problem of allocation of components to the different positions in the system so as to improve the system's reliability, and have a further discussion on the two-parallel–series and two-series–parallel systems studied in Laniado and Lillo [Reference Laniado and Lillo30]. Also, we generalize the corresponding results to parallel–series and series–parallel systems with multiple subsystems in the viewpoint of the minimal path and the minimal cut sets.
Some of our results established here can be applied in guiding system assembly policy for engineers. Consider a production system having  $n$ machines whose lifetimes are independent and nonidentically distributed random variables, and suppose that the final product is obtained through a process of
$n$ machines whose lifetimes are independent and nonidentically distributed random variables, and suppose that the final product is obtained through a process of  $n$ successive stages (or steps), and the full process is finished when a product is treated by the
$n$ successive stages (or steps), and the full process is finished when a product is treated by the  $n$ machines. Due to an increase in demand, it is necessary to open another production line with
$n$ machines. Due to an increase in demand, it is necessary to open another production line with  $n$ different machines, whose lifetimes are not necessarily identically distributed with the original ones. Note that the total production system stops when at least one machine in each line has failed. One of subsystems fails will increase the load of the other subsystem. Thus, the lifetimes of the two subsystems are dependent, and the question is how to allocate the machine to each position to improve the reliability of the total production system? In Section 3, we give an answer to this question.
$n$ different machines, whose lifetimes are not necessarily identically distributed with the original ones. Note that the total production system stops when at least one machine in each line has failed. One of subsystems fails will increase the load of the other subsystem. Thus, the lifetimes of the two subsystems are dependent, and the question is how to allocate the machine to each position to improve the reliability of the total production system? In Section 3, we give an answer to this question.
The remainder of this article is rolled out as follows. Section 2 recalls some pertinent notions and definitions used in the sequel. In Sections 3 and 4, we establish the optimal allocation policies of two-parallel–series and two-series–parallel systems, respectively. Section 5 generalizes the corresponding results obtained in Sections 3 and 4 to parallel–series and series–parallel systems with multiple subsystems in viewpoint of the minimal path and cut sets, respectively. Some conclusions and future directions are made in Section 6.
2. Preliminaries
Before proceeding to the main results, let us first review some basic concepts that will be used in the sequel. For simplicity of the discussion, we denote  $\mathbb {R}=(-\infty ,+\infty )$ and
$\mathbb {R}=(-\infty ,+\infty )$ and  $\mathbb {R}^{+}=(0,+\infty )$.
$\mathbb {R}^{+}=(0,+\infty )$.
2.1. Stochastic orders
We first give the definitions of some stochastic orders between two random variables. For a random variable  $X$, let us denote
$X$, let us denote  $F_X, {{\bar F}}_X, h_X$ and
$F_X, {{\bar F}}_X, h_X$ and  $\tilde r_X$ the distribution function, the survival function, the hazard rate function and the reversed hazard rate function, respectively.
$\tilde r_X$ the distribution function, the survival function, the hazard rate function and the reversed hazard rate function, respectively.
Definition 1 A random variable  $X$ is said to be smaller than
$X$ is said to be smaller than  $Y$ in the
$Y$ in the
(i) usual stochastic order (denoted by
 $X \le _{\textrm {st}} Y$) if $\overline {F}_X(x) \leq \overline {F}_Y(x)$ for all $x\in \mathbb {R}$;
$X \le _{\textrm {st}} Y$) if $\overline {F}_X(x) \leq \overline {F}_Y(x)$ for all $x\in \mathbb {R}$;(ii) hazard rate order (denoted by
$X\leq _{\textrm {hr}}Y$) if $h_{X}(x)\ge h_{Y}(x)$ for all $x\in \mathbb {R}$, or equivalently, if $\overline {F}_Y(x)/\overline {F}_X(x)$ is increasing in $x\in \mathbb {R}$;(iii) reversed hazard rate order (denoted by
$X\leq _{\textrm {rh}}Y$) if $\tilde r_{X}(x)\le \tilde r_{Y}(x)$ for all $x\in \mathbb {R}$, or equivalently, if ${F_Y}(x)/ {F_X}(x)$ is increasing in $x\in \mathbb {R}$.













It is well-known that the (reversed) hazard rate order implies the usual stochastic order, while the reversed statement is not true in general. For more comprehensive discussions on various stochastic orders and their applications, one may refer to the monographs by Shaked and Shanthikumar [Reference Shaked and Shanthikumar40] and Belzunce et al. [Reference Belzunce, Riquelme and Mulero3].
Definition 2 The random vector  $\boldsymbol X=(X_1,X_2,\ldots ,X_n)$ is said to follow
$\boldsymbol X=(X_1,X_2,\ldots ,X_n)$ is said to follow
(i) the proportional hazards (denoted by
$\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$) model with baseline survival function $\overline F(x)$ and frailty parameter vector $\boldsymbol \alpha =(\alpha _1,\alpha _2,\ldots ,\alpha _n)$, if $X_i$ has the survival function
$${{\bar F}}_{X_i}(x)={{\bar F}}^{\alpha_i}(x), \quad \text{for}\ \alpha_i > 0,\ i=1,2,\ldots,n.$$(ii) the proportional reversed hazards (denoted by
$\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\beta }, F)$) model with baseline distribution function $F(x)$ and resilience parameter vector $\boldsymbol \beta =(\beta _1,\beta _2,\ldots ,\beta _n)$, if $X_i$ has the distribution function
$$F_{X_i}(x)=F^{\beta_i }(x),\quad \text{for}\ \beta_i > 0,\ i=1,2,\ldots,n.$$










It is well-known that the Exponential, Weibull, Lomax and Pareto distributions are special cases of the PH model, while Fréchet distribution is an example of the PRH model. For more detailed applications of the PH model, we refer the readers to Cox [Reference Cox9], Collett [Reference Collett8], Li et al. [Reference Li, Yan and Zuo33], Yan et al. [Reference Yan, Lu and Li48] and Jarrahiferiz et al. [Reference Jarrahiferiz, Kayid and Izadkhah26], and for more comprehensive discussions on the PRH model, one may refer to Kalbfleisch and Lawless [Reference Kalbfleisch and Lawless27], Gupta and Gupta [Reference Gupta and Gupta24] and Belzunce and Martínez-Riquelme [Reference Belzunce and Martínez-Riquelme2].
2.2. Majorization order
The notion of majorization order is a key tool in establishing various inequalities arising from many research areas. For any real two vectors  $\boldsymbol {x}=(x_{1}, x_{2},\ldots , x_{n})$ and
$\boldsymbol {x}=(x_{1}, x_{2},\ldots , x_{n})$ and  $\boldsymbol {y}=(y_{1}, y_{2},\ldots , y_{n})$, denote
$\boldsymbol {y}=(y_{1}, y_{2},\ldots , y_{n})$, denote  $x_{1:n}\leq x_{2:n}\leq \cdots \leq x_{n:n}$ and
$x_{1:n}\leq x_{2:n}\leq \cdots \leq x_{n:n}$ and  $y_{1:n}\leq y_{2:n}\leq \cdots \leq y_{n:n}$ be the increasing arrangements of the components of
$y_{1:n}\leq y_{2:n}\leq \cdots \leq y_{n:n}$ be the increasing arrangements of the components of  $\boldsymbol {x}$ and
$\boldsymbol {x}$ and  $\boldsymbol {y}$, respectively.
$\boldsymbol {y}$, respectively.
Definition 3 A vector  $\boldsymbol {x}$ is said to majorize
$\boldsymbol {x}$ is said to majorize  $\boldsymbol {y}$ (denoted by
$\boldsymbol {y}$ (denoted by  $\boldsymbol {x}\overset {\textrm {{m}}}{\succeq }\boldsymbol {y}$), if
$\boldsymbol {x}\overset {\textrm {{m}}}{\succeq }\boldsymbol {y}$), if  $\sum _{i=1}^{j}x_{i:n} \leq \sum _{i=1}^{j}y_{i:n}$ for
$\sum _{i=1}^{j}x_{i:n} \leq \sum _{i=1}^{j}y_{i:n}$ for  $j=1,2,\ldots ,n-1$ and
$j=1,2,\ldots ,n-1$ and  $\sum _{i=1}^{n}x_{i:n}=\sum _{i=1}^{n}y_{i:n}$.
$\sum _{i=1}^{n}x_{i:n}=\sum _{i=1}^{n}y_{i:n}$.
For an elaborate discussion on the theory of majorization orders and their applications, one may refer to Marshall et al. [Reference Marshall, Olkin and Arnold37] and Kundu et al. [Reference Kundu, Chowdhury, Nanda and Hazra28].
Definition 4 ([Reference Marshall, Olkin and Arnold37])
A real-valued function  $\varphi$ defined on a set
$\varphi$ defined on a set  $\mathbb {A} \subseteq \mathbb {R}^{n}$ is said to be Schur-convex [Schur-concave] on
$\mathbb {A} \subseteq \mathbb {R}^{n}$ is said to be Schur-convex [Schur-concave] on  $\mathbb {A}$ if and only if
$\mathbb {A}$ if and only if  $\boldsymbol {x}\overset {\textrm {{m}}}{\succeq }\boldsymbol {y}$ implies
$\boldsymbol {x}\overset {\textrm {{m}}}{\succeq }\boldsymbol {y}$ implies  $\varphi (\boldsymbol {x}) \ge [\le ] \varphi (\boldsymbol {y})$, for any
$\varphi (\boldsymbol {x}) \ge [\le ] \varphi (\boldsymbol {y})$, for any  $\boldsymbol {x}, \boldsymbol {y}\in \mathbb {A}$.
$\boldsymbol {x}, \boldsymbol {y}\in \mathbb {A}$.
Lemma 1 ([Reference Marshall, Olkin and Arnold37])
Let  $\varphi$ be a continuously differentiable function on
$\varphi$ be a continuously differentiable function on  $\mathbb {A} \subseteq \mathbb {R}^{n}$. Then,
$\mathbb {A} \subseteq \mathbb {R}^{n}$. Then,  $\varphi$ is said to be Schur-convex [Schur-concave] on
$\varphi$ is said to be Schur-convex [Schur-concave] on  $\mathbb {A}$ if and only if
$\mathbb {A}$ if and only if  $\varphi$ is symmetric on
$\varphi$ is symmetric on  $\mathbb {A}$, and for all
$\mathbb {A}$, and for all  $\boldsymbol {z} \in \mathbb {A}$ and
$\boldsymbol {z} \in \mathbb {A}$ and  $1 \le i \neq j \le n$,
$1 \le i \neq j \le n$,
 $$(z_i-z_j) \left(\frac{\partial \varphi(\boldsymbol{z}) }{\partial z_i}-\frac{\partial\varphi(\boldsymbol{z}) }{\partial z_j}\right) \ge[\le] 0.$$
$$(z_i-z_j) \left(\frac{\partial \varphi(\boldsymbol{z}) }{\partial z_i}-\frac{\partial\varphi(\boldsymbol{z}) }{\partial z_j}\right) \ge[\le] 0.$$2.3. Copula
For a random vector  $\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ with joint cumulative distribution function
$\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ with joint cumulative distribution function  $H$ and univariate marginal distribution functions
$H$ and univariate marginal distribution functions  $F_1,F_2,\ldots ,F_n$, its copula is a distribution function
$F_1,F_2,\ldots ,F_n$, its copula is a distribution function  $C:[0,1]^{n}\to [0,1]$, such that
$C:[0,1]^{n}\to [0,1]$, such that
 $$H(\boldsymbol{x})=C(F_1(x_1),F_2(x_2),\ldots,F_{n}(x_n)).$$
$$H(\boldsymbol{x})=C(F_1(x_1),F_2(x_2),\ldots,F_{n}(x_n)).$$Similarly, a survival copula is a joint cumulative survival function  $\hat {C} :[0,1]^{n}\to [0,1]$, such that
$\hat {C} :[0,1]^{n}\to [0,1]$, such that
 $${{\bar H}}(\boldsymbol{x})=\mathbb{P}(X_1>x_1,X_2>x_2,\ldots,X_n>x_n)=\hat{C}({{\bar F}}_1(x_1),{{\bar F}}_2(x_2),\ldots,{{\bar F}}_n(x_n)),$$
$${{\bar H}}(\boldsymbol{x})=\mathbb{P}(X_1>x_1,X_2>x_2,\ldots,X_n>x_n)=\hat{C}({{\bar F}}_1(x_1),{{\bar F}}_2(x_2),\ldots,{{\bar F}}_n(x_n)),$$where  ${{\bar F}}_i=1-F_i$
${{\bar F}}_i=1-F_i$  $(i=1,2,\ldots , n)$ is the marginal survival function and
$(i=1,2,\ldots , n)$ is the marginal survival function and  ${{\bar H}}$ is the joint survival function.
${{\bar H}}$ is the joint survival function.
When  $C$ is Schur-concave,
$C$ is Schur-concave,  $C$ is said to be the Schur-concave copula. The family of the Schur-concave copula includes some important copulas, such as Archimedean copula and Farlie–Gumble–Morgenstern (FGM). For a decreasing and continuous function
$C$ is said to be the Schur-concave copula. The family of the Schur-concave copula includes some important copulas, such as Archimedean copula and Farlie–Gumble–Morgenstern (FGM). For a decreasing and continuous function  $\psi :\mathbb {R}^{+}\to [0,1]$ such that
$\psi :\mathbb {R}^{+}\to [0,1]$ such that  $\psi (0)=1$,
$\psi (0)=1$,  $\psi (+\infty )=0$,
$\psi (+\infty )=0$,  $(-1)^{k}\psi ^{(k)}(x)\geq 0$,
$(-1)^{k}\psi ^{(k)}(x)\geq 0$,  $k=0,1,\ldots ,n-2$, and
$k=0,1,\ldots ,n-2$, and  $(-1)^{n-2}\psi ^{(n-2)}(x)$ is decreasing and convex. Then,
$(-1)^{n-2}\psi ^{(n-2)}(x)$ is decreasing and convex. Then,
 $$C_{\psi}(u_{1},u_{2},\cdots,u_{n})=\psi\left(\sum_{i=1}^{n}\psi^{{-}1}(u_{i})\right),\quad u_{i} \in [0,1]$$
$$C_{\psi}(u_{1},u_{2},\cdots,u_{n})=\psi\left(\sum_{i=1}^{n}\psi^{{-}1}(u_{i})\right),\quad u_{i} \in [0,1]$$is called Archimedean copula. If we take  $\psi _\theta ^{-1}(t) = t^{\theta }-1$ as a generator, then we get the Clayton copula (cf. [Reference Cuvelier and Noirhomme-Fraiture10])
$\psi _\theta ^{-1}(t) = t^{\theta }-1$ as a generator, then we get the Clayton copula (cf. [Reference Cuvelier and Noirhomme-Fraiture10])
 \begin{equation} C_{\theta}(u_{1},u_{2},\cdots,u_{n})=\left(\sum_{i=1}^{n} u_{i}^{-\theta} -n+1 \right)^{{-}1/\theta}, \quad u_{i} \in [0,1 ] \text{ and } \theta \in (0, \infty). \end{equation}
\begin{equation} C_{\theta}(u_{1},u_{2},\cdots,u_{n})=\left(\sum_{i=1}^{n} u_{i}^{-\theta} -n+1 \right)^{{-}1/\theta}, \quad u_{i} \in [0,1 ] \text{ and } \theta \in (0, \infty). \end{equation}In fact, Archimedean copula includes Clayton family, Ali-Mikhail-Had (AMH) family and Gumbel family, etc.
As pointed in Durante and Sempi [Reference Durante and Sempi18], FGM family defined as
 \begin{equation} C_{\theta}(u_{1},u_{2},\ldots,u_{n})=\prod_{i=1}^{n}u_{i}+\theta\prod_{i=1}^{n}u_{i}(1-u_{i}), \quad u_{i} \in [0,1 ] \text{ and }\theta\in[{-}1,1], \end{equation}
\begin{equation} C_{\theta}(u_{1},u_{2},\ldots,u_{n})=\prod_{i=1}^{n}u_{i}+\theta\prod_{i=1}^{n}u_{i}(1-u_{i}), \quad u_{i} \in [0,1 ] \text{ and }\theta\in[{-}1,1], \end{equation}which must be Schur-concave but not be Archimedean copula, and every Archimedean copula must be Schur-concave, but the Schur-concave copula is not necessarily an Archimedean copula. Hence, the Schur-concave copula characterize more extensive dependency to some extent. For detailed discussions on copulas and its applications, one may refer to Durante and Sempi [Reference Durante and Sempi18], Nelsen [Reference Nelsen39] and Durante and Papini [Reference Durante and Papini17].
Next, we recall the definition of the concordance order.
Definition 5 Suppose that  $C_1$ and
$C_1$ and  $C_2$ are two copulas.
$C_2$ are two copulas.  $C_1$ is said to be smaller than
$C_1$ is said to be smaller than  $C_2$ in the concordance order (denoted by
$C_2$ in the concordance order (denoted by  $C_1\prec C_2$) if
$C_1\prec C_2$) if  $C_1(u,v)\leq C_2(u,v)$, for all
$C_1(u,v)\leq C_2(u,v)$, for all  $(u,v)\in [0,1]^{2}$.
$(u,v)\in [0,1]^{2}$.
The concordance order is referred to as the positive quadrant dependent order. For an elaborate discussion of the positive quadrant dependent and concordance order, one may refer to Lehmann [Reference Lehmann31], Dhaene and Goovaerts [Reference Dhaene and Goovaerts13,Reference Dhaene and Goovaerts14] , and Nelsen [Reference Nelsen39].
The following lemmas play a vital role in establishing the main results.
Lemma 2 If  $C(u, v)$ is a Schur-concave function, then
$C(u, v)$ is a Schur-concave function, then  $C (1-\alpha ^{x}, 1-\alpha ^{y})$ is also a Schur-concave function in
$C (1-\alpha ^{x}, 1-\alpha ^{y})$ is also a Schur-concave function in  $(x,y)$, for any
$(x,y)$, for any  $x, y >0$ and
$x, y >0$ and  $\alpha \in (0, 1)$.
$\alpha \in (0, 1)$.
Proof. Suppose  $u=1-\alpha ^{x},\ v=1-\alpha ^{y}$, without loss of generality, assume
$u=1-\alpha ^{x},\ v=1-\alpha ^{y}$, without loss of generality, assume  $x\ge y$, which implies
$x\ge y$, which implies  $u \ge v$. From the Schur-concavity of
$u \ge v$. From the Schur-concavity of  $C(u, v)$, we have
$C(u, v)$, we have
 $$\frac{\partial C(u,v) }{\partial u }-\frac{\partial C(u,v)}{\partial v}\le 0.$$
$$\frac{\partial C(u,v) }{\partial u }-\frac{\partial C(u,v)}{\partial v}\le 0.$$ Note that  ${\partial C(u,v)}/{\partial u}$ or
${\partial C(u,v)}/{\partial u}$ or  ${\partial C(u,v)}/{\partial v}$ is non-negative, it holds that,
${\partial C(u,v)}/{\partial v}$ is non-negative, it holds that,
 \begin{align*} \frac{\partial C(u,v) }{\partial x }-\frac{\partial C(u,v) }{\partial y} & = \frac{\partial C(u,v) }{\partial u }(-\alpha^{x} \ln \alpha )-\frac{\partial C(u,v) }{\partial v}(-\alpha^{y} \ln \alpha)\\ & =\left[\frac{\partial C(u,v) }{\partial v} \big(\alpha^{y}-\alpha^{x}\big) +\left(\frac{\partial C(u,v) }{\partial v}-\frac{\partial C(u,v) }{\partial u }\right) \alpha^{x} \right] \ln \alpha \le 0. \end{align*}
\begin{align*} \frac{\partial C(u,v) }{\partial x }-\frac{\partial C(u,v) }{\partial y} & = \frac{\partial C(u,v) }{\partial u }(-\alpha^{x} \ln \alpha )-\frac{\partial C(u,v) }{\partial v}(-\alpha^{y} \ln \alpha)\\ & =\left[\frac{\partial C(u,v) }{\partial v} \big(\alpha^{y}-\alpha^{x}\big) +\left(\frac{\partial C(u,v) }{\partial v}-\frac{\partial C(u,v) }{\partial u }\right) \alpha^{x} \right] \ln \alpha \le 0. \end{align*}And thus
 $$(x-y) \left(\frac{\partial C(u,v)}{\partial x }-\frac{\partial C(u,v)}{\partial y} \right) \le 0.$$
$$(x-y) \left(\frac{\partial C(u,v)}{\partial x }-\frac{\partial C(u,v)}{\partial y} \right) \le 0.$$ It follows from Lemma 1 that  $C(1-\alpha ^{x}, 1-\alpha ^{y})$ is also Schur-concave. The proof is completed.
$C(1-\alpha ^{x}, 1-\alpha ^{y})$ is also Schur-concave. The proof is completed.
Lemma 3 ([Reference Laniado and Lillo30])
The function  $R(p,\delta ,\lambda )={(p^{\delta }+p^{1-\delta }-p)}/{(p^{\lambda }+p^{1-\lambda }-p)}$ is decreasing in
$R(p,\delta ,\lambda )={(p^{\delta }+p^{1-\delta }-p)}/{(p^{\lambda }+p^{1-\lambda }-p)}$ is decreasing in  $p\in (0,1]$, for all
$p\in (0,1]$, for all  $0 < {\delta }\le {\lambda } \le \frac {1}{2}$.
$0 < {\delta }\le {\lambda } \le \frac {1}{2}$.
Combining Proposition C.1 in Part I in [Reference Marshall, Olkin and Arnold37] p. 92 with Lemma 1 in Laniado and Lillo [Reference Laniado and Lillo30], we obtain immediately the following Lemma 4.
Lemma 4 The function  $\psi (x_1,x_2)=\sum _{i=1}^{2} {x_ip^{x_i}}/{(1-p^{x_i})}$ is Schur-convex in
$\psi (x_1,x_2)=\sum _{i=1}^{2} {x_ip^{x_i}}/{(1-p^{x_i})}$ is Schur-convex in  $(x_1,x_2) \in \mathbb {R}^{+2}$, for any
$(x_1,x_2) \in \mathbb {R}^{+2}$, for any  $p\in [0,1)$.
$p\in [0,1)$.
Throughout this article, all random variables are assumed to be positive and absolutely continuous, the terms increasing and decreasing are used instead of monotone nondecreasing and monotone nonincreasing, respectively.
3. Optimal allocation of the two-parallel–series system
In this section, we investigate the allocation policies of components in the two-parallel–series system consisting of two dependent or independent subsystems with respective independent components  $A_1,A_2,\ldots ,A_n$ and
$A_1,A_2,\ldots ,A_n$ and  $B_1,B_2,\ldots ,B_n$. Let
$B_1,B_2,\ldots ,B_n$. Let  $\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ and
$\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ and  $\boldsymbol {Y}=(Y_1,Y_2,\ldots ,Y_n)$ be the lifetimes vectors of components
$\boldsymbol {Y}=(Y_1,Y_2,\ldots ,Y_n)$ be the lifetimes vectors of components  $A_1,A_2,\ldots ,A_n$ and
$A_1,A_2,\ldots ,A_n$ and  $B_1,B_2,\ldots ,B_n$, respectively. Denote
$B_1,B_2,\ldots ,B_n$, respectively. Denote  $a_k$ (
$a_k$ ( $k=1,2,\ldots ,n$) the allocation policy with consecutive allocation of components
$k=1,2,\ldots ,n$) the allocation policy with consecutive allocation of components  $A_1$ to
$A_1$ to  $A_k$ and components
$A_k$ and components  $B_{k+1}$ to
$B_{k+1}$ to  $B_{n}$ to the up-series system. The resulting two-parallel–series system under allocation policy
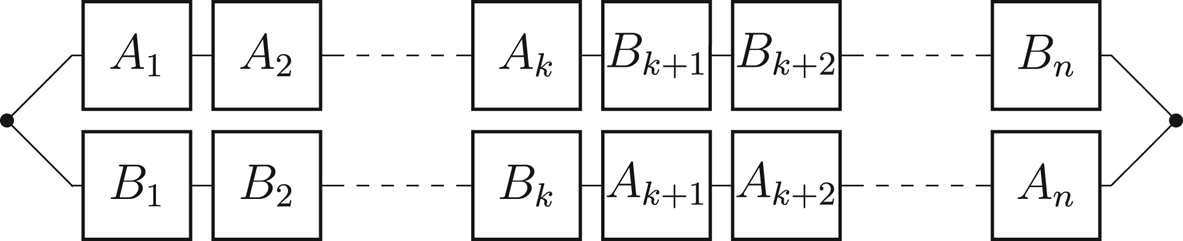
$B_{n}$ to the up-series system. The resulting two-parallel–series system under allocation policy  $a_k$ is illustrated in Figure 1. It is obvious that the possible different allocations policies of the two-parallel–series system are
$a_k$ is illustrated in Figure 1. It is obvious that the possible different allocations policies of the two-parallel–series system are  $n$ types. A natural question is, what is the optimal strategy among these allocation policies in order to improve the reliability of the system? We will explore the optimal value of allocation policies for the two-parallel–series system.
$n$ types. A natural question is, what is the optimal strategy among these allocation policies in order to improve the reliability of the system? We will explore the optimal value of allocation policies for the two-parallel–series system.

FIGURE 1. Two-parallel–series system under allocation policy  $a_k$.
$a_k$.
Denote the lifetimes of the two-parallel–series, up-series and down-series systems under allocation policy  $a_k$ by
$a_k$ by  $S_k$,
$S_k$,  $S_{uk}$ and
$S_{uk}$ and  $S_{dk}$,
$S_{dk}$,  $k=1,2,\ldots , n$, respectively. Then,
$k=1,2,\ldots , n$, respectively. Then,
 \begin{align*} S_k& =\max\{\min(X_{1},\ldots, X_{k}, Y_{k+1},\ldots, Y_{n}), \min(Y_{1},\ldots, Y_{k}, X_{k+1},\ldots, X_{n} ) \}\\ & =\max \{S_{uk}, S_{dk} \}, \end{align*}
\begin{align*} S_k& =\max\{\min(X_{1},\ldots, X_{k}, Y_{k+1},\ldots, Y_{n}), \min(Y_{1},\ldots, Y_{k}, X_{k+1},\ldots, X_{n} ) \}\\ & =\max \{S_{uk}, S_{dk} \}, \end{align*}where  $S_{uk}=\min (X_{1},\ldots , X_{k}, Y_{k+1},\ldots , Y_{n} )$ and
$S_{uk}=\min (X_{1},\ldots , X_{k}, Y_{k+1},\ldots , Y_{n} )$ and  $S_{dk}=\min (Y_{1},\ldots , Y_{k}, X_{k+1},\ldots , X_{n} )$. We assume that for each
$S_{dk}=\min (Y_{1},\ldots , Y_{k}, X_{k+1},\ldots , X_{n} )$. We assume that for each  $k$, the system has different copula
$k$, the system has different copula  $C_k$, hence, the reliability function of the two-parallel–series system can be expressed as
$C_k$, hence, the reliability function of the two-parallel–series system can be expressed as
 $${{\bar H}}_S(k;x)=\mathbb{P}(S_k>x)=1-\mathbb{P} (S_{uk} \le x, S_{dk} \le x )=1- C_k(F_{S_{u_k}}(x), F_{S_{d_k}}(x)),$$
$${{\bar H}}_S(k;x)=\mathbb{P}(S_k>x)=1-\mathbb{P} (S_{uk} \le x, S_{dk} \le x )=1- C_k(F_{S_{u_k}}(x), F_{S_{d_k}}(x)),$$where  $C_k$ is the joint copula of
$C_k$ is the joint copula of  $S_{uk}$ and
$S_{uk}$ and  $S_{dk}$,
$S_{dk}$,  $F_{S_{uk}}(x)$ and
$F_{S_{uk}}(x)$ and  $F_{S_{dk}}(x)$ are the distribution functions of
$F_{S_{dk}}(x)$ are the distribution functions of  $S_{uk}$ and
$S_{uk}$ and  $S_{dk}$, respectively. When
$S_{dk}$, respectively. When  $\boldsymbol {X} \sim \textrm {PH}(\boldsymbol {\alpha }, {{\bar F}})$ and
$\boldsymbol {X} \sim \textrm {PH}(\boldsymbol {\alpha }, {{\bar F}})$ and  $\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$, we have
$\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$, we have
 \begin{align*} F_{S_{uk}}(x)=1-[{{\bar F}}(x)]^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i} \quad \text{and}\quad F_{S_{dk}}(x)=1- [{{\bar F}}(x)]^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}. \end{align*}
\begin{align*} F_{S_{uk}}(x)=1-[{{\bar F}}(x)]^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i} \quad \text{and}\quad F_{S_{dk}}(x)=1- [{{\bar F}}(x)]^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}. \end{align*}3.1. Dependence case
In this subsection, we consider the case of two subsystems are dependent. Denote the reliability function of the resulting two-parallel–series system under allocation policy  $a_k$ by
$a_k$ by  ${{\bar H}}_S(k;x)$,
${{\bar H}}_S(k;x)$,  $k=1,2,\ldots , n$. Then,
$k=1,2,\ldots , n$. Then,
 $${{\bar H}}_S(k;x)=1-C_k(1- {{\bar F}} ^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i}, 1- {{\bar F}}^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}).$$
$${{\bar H}}_S(k;x)=1-C_k(1- {{\bar F}} ^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i}, 1- {{\bar F}}^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}).$$Theorem 1 presents some sufficient conditions for the lifetime of the two-parallel–series system under different allocation policies in terms of the usual stochastic order.
Theorem 1 For  $\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and
$\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and  $\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$, suppose that
$\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$, suppose that  $C_{k_1}$ or
$C_{k_1}$ or  $C_{k_2}$ is Schur-concave and
$C_{k_2}$ is Schur-concave and  $C_{k_1} \prec C_{k_2}$,
$C_{k_1} \prec C_{k_2}$,  $k_1 < k_2$. If
$k_1 < k_2$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $S_{k_1 } \ge _{\textrm {st}} S_{k_2}$.
$S_{k_1 } \ge _{\textrm {st}} S_{k_2}$.
Proof. The survival function of the resulting two-parallel–series system under allocation policy  $a_{k_j}$ can be written as
$a_{k_j}$ can be written as
 \begin{align*} {{\bar H}}_{S} (k_j;x)& =1-C_{k_j}(1- {{\bar F}} ^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}, 1- {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}} )\\ & =1-C_{k_j}(1-{{\bar F}}^{ s_{j1}}, 1-{{\bar F}}^{s_{j2}}), \end{align*}
\begin{align*} {{\bar H}}_{S} (k_j;x)& =1-C_{k_j}(1- {{\bar F}} ^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}, 1- {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}} )\\ & =1-C_{k_j}(1-{{\bar F}}^{ s_{j1}}, 1-{{\bar F}}^{s_{j2}}), \end{align*}where  $s_{j1}={\sum _{i=1}^{k_j}\alpha _{i:n}+\sum _{i=k_j+1}^{n}\beta _{i:n}}$ and
$s_{j1}={\sum _{i=1}^{k_j}\alpha _{i:n}+\sum _{i=k_j+1}^{n}\beta _{i:n}}$ and  $s_{j2}={\sum _{i=1}^{k_j}\beta _{i:n}+\sum _{i=k_j+1}^{n}\alpha _{i:n}},\ j=1,2$. From Lemma 2, the Schur-concavity of
$s_{j2}={\sum _{i=1}^{k_j}\beta _{i:n}+\sum _{i=k_j+1}^{n}\alpha _{i:n}},\ j=1,2$. From Lemma 2, the Schur-concavity of  $C_{k_1}$ implies that
$C_{k_1}$ implies that  $C_{k_j}(1-{{\bar F}}^{ s_{j1}}, 1-{{\bar F}}^{s_{j2}})$ is also Schur-concave. According to
$C_{k_j}(1-{{\bar F}}^{ s_{j1}}, 1-{{\bar F}}^{s_{j2}})$ is also Schur-concave. According to  $\boldsymbol {\alpha }\overset {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$, it holds that
$\boldsymbol {\alpha }\overset {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$, it holds that
 $$\sum_{i=1}^{k_j}\alpha_{i:n} \le \sum_{i=1}^{k_j}\beta_{i:n} ,\quad \sum_{i=k_j+1}^{n}\beta_{i:n} \le \sum_{i=k_j+1}^{n}\alpha_{i:n}, \quad j=1,2,$$
$$\sum_{i=1}^{k_j}\alpha_{i:n} \le \sum_{i=1}^{k_j}\beta_{i:n} ,\quad \sum_{i=k_j+1}^{n}\beta_{i:n} \le \sum_{i=k_j+1}^{n}\alpha_{i:n}, \quad j=1,2,$$thus,
 \begin{equation} {\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}} \le {\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}, \quad j=1,2. \end{equation}
\begin{equation} {\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}} \le {\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}, \quad j=1,2. \end{equation} Based on conditions  $k_1 < k_2$ and
$k_1 < k_2$ and  $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, we have
$\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, we have
 $$\sum_{i=1}^{k_1}\alpha_{i:n}+ \sum_{i=k_1+1}^{k_2}\beta_{i:n} +\sum_{i=k_2+1}^{n}\beta_{i:n} \le \sum_{i=1}^{k_1}\alpha_{i:n}+ \sum_{i=k_1+1}^{k_2}\alpha_{i:n} +\sum_{i=k_2+1}^{n}\beta_{i:n},$$
$$\sum_{i=1}^{k_1}\alpha_{i:n}+ \sum_{i=k_1+1}^{k_2}\beta_{i:n} +\sum_{i=k_2+1}^{n}\beta_{i:n} \le \sum_{i=1}^{k_1}\alpha_{i:n}+ \sum_{i=k_1+1}^{k_2}\alpha_{i:n} +\sum_{i=k_2+1}^{n}\beta_{i:n},$$which is equivalent to
 \begin{equation} \sum_{i=1}^{k_1}\alpha_{i:n} +\sum_{i=k_1+1}^{n}\beta_{i:n} \le \sum_{i=1}^{k_2}\alpha_{i:n}+ \sum_{i=k_2+1}^{n}\beta_{i:n} . \end{equation}
\begin{equation} \sum_{i=1}^{k_1}\alpha_{i:n} +\sum_{i=k_1+1}^{n}\beta_{i:n} \le \sum_{i=1}^{k_2}\alpha_{i:n}+ \sum_{i=k_2+1}^{n}\beta_{i:n} . \end{equation}According to (3) and (4), we obtain the following majorization order
 \begin{align} & \left( \sum_{i=1}^{k_1}\alpha_{i:n}+\sum_{i=k_1+1}^{n}\beta_{i:n}, \sum_{i=1}^{k_1}\beta_{i:n}+ \sum_{i=k_1+1}^{n}\alpha_{i:n}\right) \nonumber\\ & \quad \stackrel{\textrm{{m}}}{\succeq} \left( \sum_{i=1}^{k_2}\alpha_{i:n}+\sum_{i=k_2+1}^{n}\beta_{i:n}, \sum_{i=1}^{k_2}\beta_{i:n}+ \sum_{i=k_2+1}^{n}\alpha_{i:n} \right), \end{align}
\begin{align} & \left( \sum_{i=1}^{k_1}\alpha_{i:n}+\sum_{i=k_1+1}^{n}\beta_{i:n}, \sum_{i=1}^{k_1}\beta_{i:n}+ \sum_{i=k_1+1}^{n}\alpha_{i:n}\right) \nonumber\\ & \quad \stackrel{\textrm{{m}}}{\succeq} \left( \sum_{i=1}^{k_2}\alpha_{i:n}+\sum_{i=k_2+1}^{n}\beta_{i:n}, \sum_{i=1}^{k_2}\beta_{i:n}+ \sum_{i=k_2+1}^{n}\alpha_{i:n} \right), \end{align}hence, we have
 $$( s_{11}, s_{12} ) \stackrel{\textrm{{m}}}{\succeq} ( s_{21}, s_{22} ),$$
$$( s_{11}, s_{12} ) \stackrel{\textrm{{m}}}{\succeq} ( s_{21}, s_{22} ),$$combining Schur-concavity of  $C_{k_j}(1-{{\bar F}}^{ s_{j1}}, 1-{{\bar F}}^{s_{j2}})$ with the majorization order, it holds that
$C_{k_j}(1-{{\bar F}}^{ s_{j1}}, 1-{{\bar F}}^{s_{j2}})$ with the majorization order, it holds that
 \begin{align*} {{\bar H}}_{S} ({k_1 };x)& =1-C_{k_1}(1-{{\bar F}}^{ s_{11}}, 1-{{\bar F}}^{s_{12}})\\ & \ge 1-C_{k_1}(1-{{\bar F}}^{ s_{21}}, 1-{{\bar F}}^{s_{22}}) \\ & \ge 1-C_{k_2}(1-{{\bar F}}^{ s_{21}}, 1-{{\bar F}}^{s_{22}}) ={{\bar H}}_{S} ({k_2 };x), \end{align*}
\begin{align*} {{\bar H}}_{S} ({k_1 };x)& =1-C_{k_1}(1-{{\bar F}}^{ s_{11}}, 1-{{\bar F}}^{s_{12}})\\ & \ge 1-C_{k_1}(1-{{\bar F}}^{ s_{21}}, 1-{{\bar F}}^{s_{22}}) \\ & \ge 1-C_{k_2}(1-{{\bar F}}^{ s_{21}}, 1-{{\bar F}}^{s_{22}}) ={{\bar H}}_{S} ({k_2 };x), \end{align*}the last inequality follows from the assumption  $C_{k_1} \prec C_{k_2}$. The proof is completed.
$C_{k_1} \prec C_{k_2}$. The proof is completed.
Remark 1 Theorem 1 shows that the reliability of the two-parallel–series system can be improved when the components are allocated by unbalancing as much as possible in two subsystems in the sense of the usual stochastic order, that means fewer components from group A are in the first series subsystem, meanwhile, more components from group A are in the second series subsystem. Note that Theorem 1 generalizes Theorem 2.1 of El-Neweihi et al. [Reference El-Neweihi, Proschan and Sethuraman19] to the case of dependent subsystems.
The following Example 1(i) illustrates the result of Theorem 1, and Example 1(ii) shows that the condition  $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$ can not be dropped.
$\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$ can not be dropped.
Example 1 Under the assumptions of Theorem 1, let  ${{\bar F}}(x)=e^{-\lambda x}$, suppose subsystems
${{\bar F}}(x)=e^{-\lambda x}$, suppose subsystems  $S_1$ and
$S_1$ and  $S_2$ have FGM copula as (2)
$S_2$ have FGM copula as (2)
 $$C_{\theta_j}(u_{1},u_{2})=u_{1}u_{2}(1+\theta_j(1-u_{1})(1-u_{2})), \quad u_{1}, u_{2} \in [0,1 ] \text{ and }\theta_j\in[{-}1,1],$$
$$C_{\theta_j}(u_{1},u_{2})=u_{1}u_{2}(1+\theta_j(1-u_{1})(1-u_{2})), \quad u_{1}, u_{2} \in [0,1 ] \text{ and }\theta_j\in[{-}1,1],$$ $j=1,2,3,4$. Assume
$j=1,2,3,4$. Assume  $\lambda =0.008, \theta _1=-0.9, \theta _2=-0.3, \theta _3=0.2$, and
$\lambda =0.008, \theta _1=-0.9, \theta _2=-0.3, \theta _3=0.2$, and  $\theta _4=0.9$. For convenience, let
$\theta _4=0.9$. For convenience, let  $k_1=1, k_2=2,k_3=3,k_4=4$ in all examples of this paper. To plot the entire survival curves of
$k_1=1, k_2=2,k_3=3,k_4=4$ in all examples of this paper. To plot the entire survival curves of  $S_{k_1}$ and
$S_{k_1}$ and  $S_{k_2}$ on
$S_{k_2}$ on  $[0, \infty )$, we perform the transformation
$[0, \infty )$, we perform the transformation  $e^{-x}: [0, \infty ) \to (0, 1]$. Then, it is obvious that
$e^{-x}: [0, \infty ) \to (0, 1]$. Then, it is obvious that  $S_{k_1} \le _{\textrm {st}} S_{k_2}$ is equivalent to
$S_{k_1} \le _{\textrm {st}} S_{k_2}$ is equivalent to  $e^{-S_{k_1}} \ge _{\textrm {st}} e^{-S_{k_2}}$.
$e^{-S_{k_1}} \ge _{\textrm {st}} e^{-S_{k_2}}$.
(i) Seting
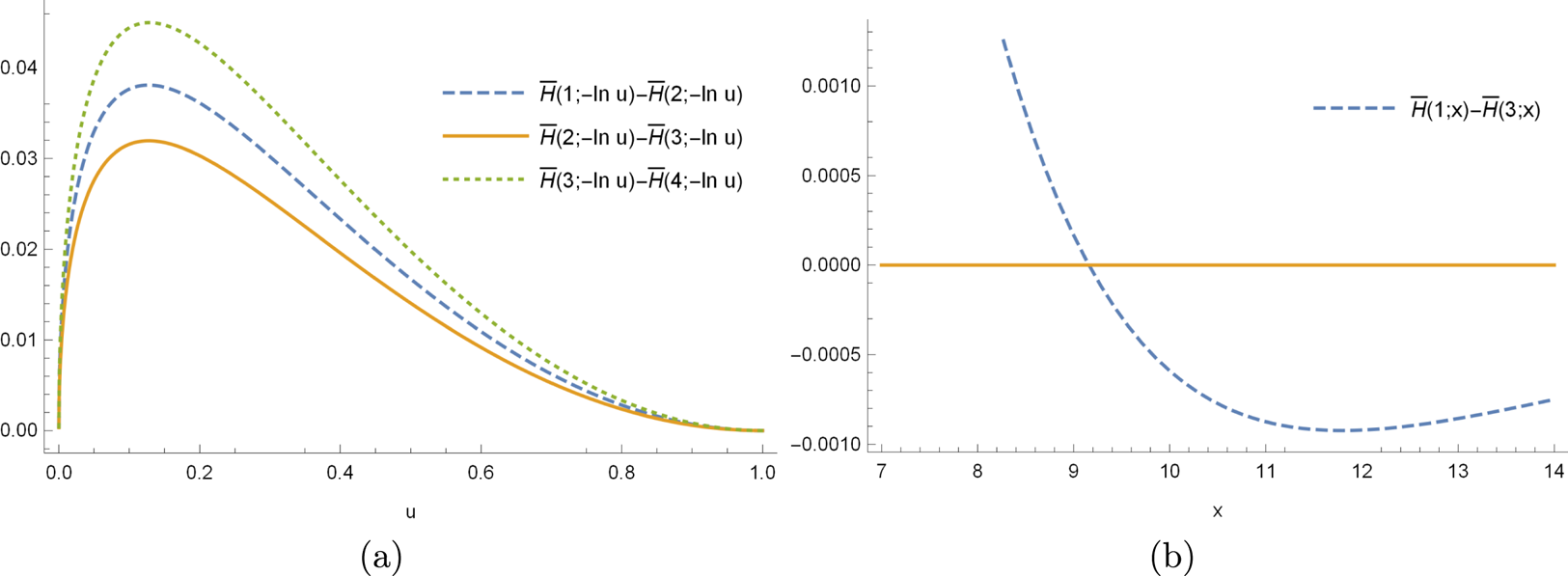
$\boldsymbol {\alpha }=(1,8, 11, 23)\stackrel {\textrm {{m}}}{\succeq }(6,7,10,20)=\boldsymbol {\beta },$ from Figure 2(a) we can see that the difference function ${{\bar H}}_{S}(k_{i};x)- {{\bar H}}_{S}(k_{i+1};x)$ is always non-negative, $i=1,2,3$, for all $x=-\ln u$ and $u\in (0,1]$. Hence, ${{\bar H}}_{S}({k_1};x) \ge {{\bar H}}_{S}({k_2};x) \ge {{\bar H}}_{S}({k_3};x) \ge {{\bar H}}_{S}({k_4};x)$, which is in accordance with Theorem 1.(ii) Taking
$\boldsymbol {\alpha }=(1,8, 11, 23)\stackrel {\textrm {{m}}} {\succeq }(2,9,12,20)=\boldsymbol {\beta }$ with remaining conditions unchanged, notice that $\sum _{i=2}^{3}\alpha _{i:n} < \sum _{i=2}^{3}\beta _{i:n}$. Figure 2(b) displays the curves of ${{\bar H}}_{U}(k_{1};x)- {{\bar H}}_{U}(k_{3};x)$, which is crossing with the line $y=0$, this shows that the usual stochastic order does not hold between $S_{k_1}$ and $S_{k_2}$. Therefore, the condition $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$ can not be dropped.














FIGURE 2. Plots of the difference functions  ${{\bar H}}_{S}(k_{i};-\ln u)- {{\bar H}}_{S}(k_{i+1};-\ln u)$,
${{\bar H}}_{S}(k_{i};-\ln u)- {{\bar H}}_{S}(k_{i+1};-\ln u)$,  $i=1,2,3$, for all
$i=1,2,3$, for all  $u\in (0,1]$.
$u\in (0,1]$.
Combining Theorem 1 with the transitivity of the usual stochastic order, we have the following corollary.
Corollary 1 For  $\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and
$\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and  $\boldsymbol {Y} \sim \textrm {PH} (\boldsymbol {\beta }, {{\bar F}})$, suppose that
$\boldsymbol {Y} \sim \textrm {PH} (\boldsymbol {\beta }, {{\bar F}})$, suppose that  $n-1$ copulas of
$n-1$ copulas of  $C_{j}\ (j=1,2,\ldots , n)$ are Schur-concave, and
$C_{j}\ (j=1,2,\ldots , n)$ are Schur-concave, and  $C_{k}\leq C_{k+1}(k=1,2,\ldots ,n-1)$. If
$C_{k}\leq C_{k+1}(k=1,2,\ldots ,n-1)$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\alpha _{i:n} \ge \beta _{i:n}$,
$\alpha _{i:n} \ge \beta _{i:n}$,  $i=2,3,\ldots ,n$, then
$i=2,3,\ldots ,n$, then
 $$S_1 \ge_{\textrm{st}} S_2 \ge_{\textrm{st}} \cdots \ge_{\textrm{st}} S_n.$$
$$S_1 \ge_{\textrm{st}} S_2 \ge_{\textrm{st}} \cdots \ge_{\textrm{st}} S_n.$$ Corollary 1 shows that  $a_1$ is the optimal allocation policy and
$a_1$ is the optimal allocation policy and  $a_n$ is the worst allocation policy within all possible allocations.
$a_n$ is the worst allocation policy within all possible allocations.
3.2. Independence case
In this part, we consider that the case of two subsystems are independent. The reliability function of the resulting two-parallel–series system can be written as
 $${{\bar H}}_S(k;x) =1-(1- {{\bar F}} ^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i}) (1-{{\bar F}}^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}).$$
$${{\bar H}}_S(k;x) =1-(1- {{\bar F}} ^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i}) (1-{{\bar F}}^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}).$$Theorem 2 provides some sufficient conditions to compare the lifetime of two-parallel–series system with respect to the hazard rate and the reversed hazard rate orders.
Theorem 2 For  $\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and
$\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and  $\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$. If
$\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\sum _{i=k_1+1}^{k_2} \alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2} \alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $k_1 < k_2$ implies
$k_1 < k_2$ implies
(i)
$S_{k_1 } \ge _{\textrm {hr}} S_{k_2}$ and(ii)
$S_{k_1 } \ge _{\textrm {rh}} S_{k_2}$.


Proof. (i) Note that the survival function of  ${S_{k_j}}\ (j=1,2)$ can be expressed by
${S_{k_j}}\ (j=1,2)$ can be expressed by
 $${{\bar H}}_{S}(k_j;x)={{\bar F}}^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}+ {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}- {{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}.$$
$${{\bar H}}_{S}(k_j;x)={{\bar F}}^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}+ {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}- {{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}.$$To reach the desired result, it suffices to show that
 \begin{align*} R_S(k_1,k_2; x) & =\frac {{{\bar F}} ^{\sum_{i=1}^{k_1}\alpha_{i:n}+\sum_{i=k_1+1}^{n}\beta_{i:n}}+ {{\bar F}}^{\sum_{i=1}^{k_1}\beta_{i:n}+\sum_{i=k_1+1}^{n}\alpha_{i:n}}- {{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}} {{{\bar F}} ^{\sum_{i=1}^{k_2}\alpha_{i:n}+\sum_{i=k_2+1}^{n}\beta_{i:n}}+ {{\bar F}}^{\sum_{i=1}^{k_2}\beta_{i:n}+\sum_{i=k_2+1}^{n}\alpha_{i:n}}- {{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}}\\ & =\frac {p(x)^{t_\delta }+p(x)^{1-t_\delta }-p(x)} {p(x)^{t_\lambda}+p(x)^{1-t_\lambda}-p(x)} \end{align*}
\begin{align*} R_S(k_1,k_2; x) & =\frac {{{\bar F}} ^{\sum_{i=1}^{k_1}\alpha_{i:n}+\sum_{i=k_1+1}^{n}\beta_{i:n}}+ {{\bar F}}^{\sum_{i=1}^{k_1}\beta_{i:n}+\sum_{i=k_1+1}^{n}\alpha_{i:n}}- {{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}} {{{\bar F}} ^{\sum_{i=1}^{k_2}\alpha_{i:n}+\sum_{i=k_2+1}^{n}\beta_{i:n}}+ {{\bar F}}^{\sum_{i=1}^{k_2}\beta_{i:n}+\sum_{i=k_2+1}^{n}\alpha_{i:n}}- {{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}}\\ & =\frac {p(x)^{t_\delta }+p(x)^{1-t_\delta }-p(x)} {p(x)^{t_\lambda}+p(x)^{1-t_\lambda}-p(x)} \end{align*}is increasing in  $x \in \mathbb {R}^{+}$, where
$x \in \mathbb {R}^{+}$, where
 $$p(x)={{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}, \quad t_\delta=\frac{\sum_{i=1}^{k_1}\alpha_{i:n}+\sum_{i=k_1+1}^{n}\beta_{i:n}}{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}$$
$$p(x)={{\bar F}}^{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}, \quad t_\delta=\frac{\sum_{i=1}^{k_1}\alpha_{i:n}+\sum_{i=k_1+1}^{n}\beta_{i:n}}{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}$$and
 $$t_\lambda=\frac{\sum_{i=1}^{k_2}\alpha_{i:n}+\sum_{i=k_2+1}^{n}\beta_{i:n}}{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}.$$
$$t_\lambda=\frac{\sum_{i=1}^{k_2}\alpha_{i:n}+\sum_{i=k_2+1}^{n}\beta_{i:n}}{\sum_{i=1}^{n}\alpha_{i:n}+\sum_{i=1}^{n}\beta_{i:n}}.$$ Note that (3) and (4) imply  $t_\delta \le t_\lambda \le 1/2,$ it holds from Lemma 3 that
$t_\delta \le t_\lambda \le 1/2,$ it holds from Lemma 3 that  $R_S(k_1,k_2; x)$ is decreasing in
$R_S(k_1,k_2; x)$ is decreasing in  $p(x)$, and consider that
$p(x)$, and consider that  $p(x)$ is decreasing in
$p(x)$ is decreasing in  $x\in \mathbb {R}^{+}$, hence,
$x\in \mathbb {R}^{+}$, hence,  $R_S(k_1,k_2; x)$ is increasing in
$R_S(k_1,k_2; x)$ is increasing in  $x \in \mathbb {R}^{+}$, which completes the proof of (i) .
$x \in \mathbb {R}^{+}$, which completes the proof of (i) .
(ii) Denote the distribution function and the reversed hazard rate function of  $S$ under allocation policy
$S$ under allocation policy  $a_{k_j}$ by
$a_{k_j}$ by  $H_{S}(k_j; x)$ and
$H_{S}(k_j; x)$ and  $\tilde {r}_{S}(k_j;x)$, respectively. Then,
$\tilde {r}_{S}(k_j;x)$, respectively. Then,
 $$H_{S}(k_j; x)=(1- {{\bar F}} ^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}) (1-{{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}})$$
$$H_{S}(k_j; x)=(1- {{\bar F}} ^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}) (1-{{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}})$$and
 \begin{align*} \tilde{r}_{S}(k_j;x)& =\frac{\mathrm{d}}{\mathrm{d} x} [\ln (1- {{\bar F}} ^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}})+ \ln (1-{{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}})]\\ & =\frac{f(x) }{{{\bar F}}(x)} \left(\frac{(\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}){{\bar F}}^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}}{1- {{\bar F}}^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}}\right)\\ & \quad + \frac{f(x) }{{{\bar F}}(x)} \left(\frac{( \sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}) {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}}{1- {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}}\right)\\ & =r(x)\sum_{m=1}^{2} \frac{t_{jm}{{\bar F}}^{t_{jm}}}{1-{{\bar F}}^{t_{jm}}}, \end{align*}
\begin{align*} \tilde{r}_{S}(k_j;x)& =\frac{\mathrm{d}}{\mathrm{d} x} [\ln (1- {{\bar F}} ^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}})+ \ln (1-{{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}})]\\ & =\frac{f(x) }{{{\bar F}}(x)} \left(\frac{(\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}){{\bar F}}^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}}{1- {{\bar F}}^{\sum_{i=1}^{k_j}\alpha_{i:n}+\sum_{i=k_j+1}^{n}\beta_{i:n}}}\right)\\ & \quad + \frac{f(x) }{{{\bar F}}(x)} \left(\frac{( \sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}) {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}}{1- {{\bar F}}^{\sum_{i=1}^{k_j}\beta_{i:n}+\sum_{i=k_j+1}^{n}\alpha_{i:n}}}\right)\\ & =r(x)\sum_{m=1}^{2} \frac{t_{jm}{{\bar F}}^{t_{jm}}}{1-{{\bar F}}^{t_{jm}}}, \end{align*}where  $t_{j1}=\sum _{i=1}^{k_j}\alpha _{i:n}+\sum _{i=k_j+1}^{n}\beta _{i:n}$ and
$t_{j1}=\sum _{i=1}^{k_j}\alpha _{i:n}+\sum _{i=k_j+1}^{n}\beta _{i:n}$ and  $t_{j2}=\sum _{i=1}^{k_j}\beta _{i:n}+\sum _{i=k_j+1}^{n}\alpha _{i:n},\ j=1,2$.
$t_{j2}=\sum _{i=1}^{k_j}\beta _{i:n}+\sum _{i=k_j+1}^{n}\alpha _{i:n},\ j=1,2$.
For any fixed  $x\in \mathbb {R}^{+}$, it follows from Lemma 4 that
$x\in \mathbb {R}^{+}$, it follows from Lemma 4 that  $\sum _{m=1}^{2} {t_{jm}{{\bar F}}^{t_{jm}}}/{(1-{{\bar F}}^{t_{jm}})}$ is Schur-convex in
$\sum _{m=1}^{2} {t_{jm}{{\bar F}}^{t_{jm}}}/{(1-{{\bar F}}^{t_{jm}})}$ is Schur-convex in  $(t_{j1}, t_{j2})$, and thus
$(t_{j1}, t_{j2})$, and thus  $\tilde {r}_{S}(k_j;x)$ is also Schur-convex. Note that (5) implies
$\tilde {r}_{S}(k_j;x)$ is also Schur-convex. Note that (5) implies  $( t_{11}, t_{12} ) \stackrel {\textrm {{m}}}{\succeq } ( t_{21}, t_{22} )$, we have
$( t_{11}, t_{12} ) \stackrel {\textrm {{m}}}{\succeq } ( t_{21}, t_{22} )$, we have
 $$\tilde{r}_{S}(k_1;x)=r(x)\sum_{m=1}^{2} \frac{t_{1m}{{\bar F}}^{t_{1m}}}{1-{{\bar F}}^{t_{1m}}} \ge r(x)\sum_{m=1}^{2} \frac{t_{2m}{{\bar F}}^{t_{2m}}}{1-{{\bar F}}^{t_{2m}}}=\tilde{r}_{S}(k_2;x),$$
$$\tilde{r}_{S}(k_1;x)=r(x)\sum_{m=1}^{2} \frac{t_{1m}{{\bar F}}^{t_{1m}}}{1-{{\bar F}}^{t_{1m}}} \ge r(x)\sum_{m=1}^{2} \frac{t_{2m}{{\bar F}}^{t_{2m}}}{1-{{\bar F}}^{t_{2m}}}=\tilde{r}_{S}(k_2;x),$$for all  $x \in \mathbb {R}^{+}$. Then, the theorem is proved.
$x \in \mathbb {R}^{+}$. Then, the theorem is proved.
Remark 2 Theorem 2 indicates that the performance of the two-parallel–series system can be improved in the sense of the (reversed) hazard rate order when two-series subsystems are as unbalancing as possible. Theorems IV.1 and III.1 of Laniado and Lillo [Reference Laniado and Lillo30] are the special cases of Theorem 2 under some certain conditions.
The next example illustrates the theoretical result of Theorem 2.
Example 2 Under the setups of Theorem 2, assume  ${{\bar F}}(x)=e^{-\lambda x}$, set
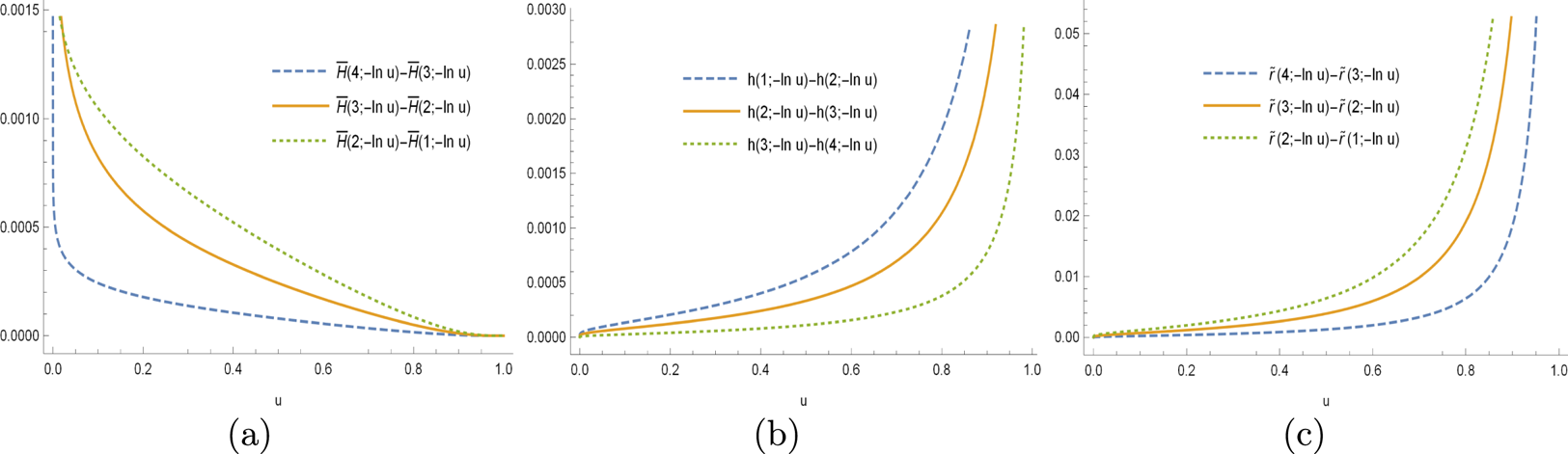
${{\bar F}}(x)=e^{-\lambda x}$, set  $\boldsymbol {\alpha }=(0.1,0.8, 1.1, 2.3) \stackrel{\textrm {{m}}}{\succeq }(0.6,0.7,1,2)=\boldsymbol {\beta }, \lambda =0.8$. Figure 3(a) and 3(b) plots the difference functions
$\boldsymbol {\alpha }=(0.1,0.8, 1.1, 2.3) \stackrel{\textrm {{m}}}{\succeq }(0.6,0.7,1,2)=\boldsymbol {\beta }, \lambda =0.8$. Figure 3(a) and 3(b) plots the difference functions  $h_{S}(k_{i+1};x)-h_{S}({k_i};x)$ and
$h_{S}(k_{i+1};x)-h_{S}({k_i};x)$ and  $\tilde {r}_{S}(k_{i};x)-\tilde {r}_{S}({k_{i+1}};x)$, respectively,
$\tilde {r}_{S}(k_{i};x)-\tilde {r}_{S}({k_{i+1}};x)$, respectively,  $i=1,2,3,$ for all
$i=1,2,3,$ for all  $x=-\ln u$ and
$x=-\ln u$ and  $u\in (0,1]$. They are always non-negative, which demonstrates the theoretical results of Theorem 2.
$u\in (0,1]$. They are always non-negative, which demonstrates the theoretical results of Theorem 2.

FIGURE 3. Plots of the difference functions  $h_{S}(k_{i+1};x)-h_{S}({k_i};x)$ and
$h_{S}(k_{i+1};x)-h_{S}({k_i};x)$ and  $\tilde {r}_{S}(k_{i};x)-\tilde {r}_{S}({k_{i+1}};x),\ i=1,2,3$, for all
$\tilde {r}_{S}(k_{i};x)-\tilde {r}_{S}({k_{i+1}};x),\ i=1,2,3$, for all  $x=-\ln u$ and
$x=-\ln u$ and  $u\in (0,1]$.
$u\in (0,1]$.
The following corollary can be obtained from Theorem 2 and the transitivity of the hazard rate order and the reversed hazard rate order.
Corollary 2 For  $\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and
$\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }, {{\bar F}})$ and  $\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$. If
$\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }, {{\bar F}})$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\alpha _{i:n} \ge \beta _{i:n}$, i = 2,3,…,n, then
$\alpha _{i:n} \ge \beta _{i:n}$, i = 2,3,…,n, then
(i)
$S_1 \ge _{\textrm {hr}} S_2 \ge _{\textrm {hr}} \cdots \ge _{\textrm {hr}} S_n$ and(ii)
$S_1 \ge _{\textrm {rh}} S_2 \ge _{\textrm {rh}} \cdots \ge _{\textrm {rh}} S_n$.


In accordance with Corollary 2,  $a_1$ is the optimal allocation policy and
$a_1$ is the optimal allocation policy and  $a_n$ is the worst allocation policy within all possible allocations.
$a_n$ is the worst allocation policy within all possible allocations.
4. Optimal allocation of the two-series–parallel system
In this section, we are interested in the optimal allocation policy in the two-series–parallel system. Let  $\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ and
$\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ and  $\boldsymbol {Y}=(Y_1,Y_2,\ldots ,Y_n)$ be the lifetime vectors of components
$\boldsymbol {Y}=(Y_1,Y_2,\ldots ,Y_n)$ be the lifetime vectors of components  $A_1,A_2,\ldots ,A_n$ and
$A_1,A_2,\ldots ,A_n$ and  $B_1,B_2,\ldots ,B_n$, respectively. Denote the allocation policy with consecutive allocation of components
$B_1,B_2,\ldots ,B_n$, respectively. Denote the allocation policy with consecutive allocation of components  $A_1$ to
$A_1$ to  $A_k$ and components
$A_k$ and components  $B_{k+1}$ to
$B_{k+1}$ to  $B_{n}$ being allocated to the left-parallel system by
$B_{n}$ being allocated to the left-parallel system by  $b_k$,
$b_k$,  $k=1,2,\ldots ,n$. The resulting two-series–parallel system under allocation policy
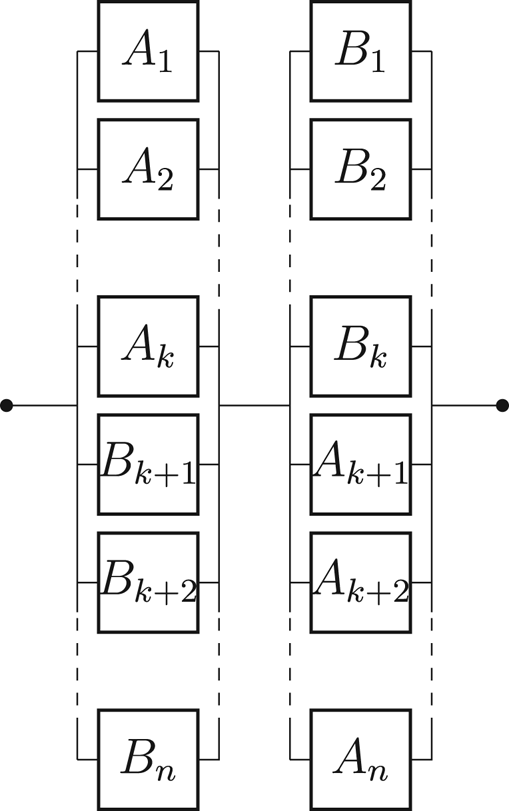
$k=1,2,\ldots ,n$. The resulting two-series–parallel system under allocation policy  $b_k$ is illustrated in Figure 4.
$b_k$ is illustrated in Figure 4.

FIGURE 4. Two-series–parallel system under allocation policy  $b_k$.
$b_k$.
Denote the lifetimes of the two-series–parallel, left-parallel and right-parallel systems under allocation  $b_k$ by
$b_k$ by  $U_k$,
$U_k$,  $U_{lk}$ and
$U_{lk}$ and  $U_{rk}$,
$U_{rk}$,  $k=1,2,\ldots , n$, respectively. Then, the reliability function of the two-series–parallel system can be expressed as
$k=1,2,\ldots , n$, respectively. Then, the reliability function of the two-series–parallel system can be expressed as
 $${{\bar H}}_U(k;x)=\mathbb{P}(U_k>x) =\mathbb{P}(U_{lk}>x,U_{rk}>x)=\hat C_k({{\bar F}}_{U_{lk}}(x), {{\bar F}}_{U_{rk}}(x)),$$
$${{\bar H}}_U(k;x)=\mathbb{P}(U_k>x) =\mathbb{P}(U_{lk}>x,U_{rk}>x)=\hat C_k({{\bar F}}_{U_{lk}}(x), {{\bar F}}_{U_{rk}}(x)),$$where  $\hat {C}_k$ is the joint survival copula of
$\hat {C}_k$ is the joint survival copula of  ${U_{lk}}$ and
${U_{lk}}$ and  ${U_{rk}}$,
${U_{rk}}$,  ${{\bar F}}_{U_{lk}}(x)$ and
${{\bar F}}_{U_{lk}}(x)$ and  ${{\bar F}}_{U_{rk}}(x)$ are the survival functions of
${{\bar F}}_{U_{rk}}(x)$ are the survival functions of  ${U_{lk}}$ and
${U_{lk}}$ and  ${U_{rk}}$, respectively. When
${U_{rk}}$, respectively. When  $\boldsymbol {X} \sim \textrm {PRH}(\boldsymbol {\alpha }, F)$ and
$\boldsymbol {X} \sim \textrm {PRH}(\boldsymbol {\alpha }, F)$ and  $\boldsymbol {Y} \sim \textrm {PRH} (\boldsymbol {\beta }, F)$, we have
$\boldsymbol {Y} \sim \textrm {PRH} (\boldsymbol {\beta }, F)$, we have
 $${{\bar F}}_{U_{lk}}(x)=1-[ F(x)]^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i} \quad \text{and}\quad {{\bar F}}_{U_{rk}}(x)=1- [ F(x)]^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}.$$
$${{\bar F}}_{U_{lk}}(x)=1-[ F(x)]^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i} \quad \text{and}\quad {{\bar F}}_{U_{rk}}(x)=1- [ F(x)]^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i}.$$4.1. Dependent case
In this subsection, we focus that the case of two subsystems are dependent. Denote the reliability function of the resulting two-series–parallel system under the allocation policy  $b_k$ by
$b_k$ by  ${{\bar H}}_U(k;x)$,
${{\bar H}}_U(k;x)$,  $k=1,2,\ldots , n$. Then,
$k=1,2,\ldots , n$. Then,
 $${{\bar H}}_U(k;x)=\hat C_k(1- F^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i}, 1- F^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i} ).$$
$${{\bar H}}_U(k;x)=\hat C_k(1- F^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i}, 1- F^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i} ).$$The following result establishes the usual stochastic order for the two-series–parallel system. The proof can be obtained along the same way with that of Theorem 1, and thus omitted here.
Theorem 3 For  $\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and
$\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and  $\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$, suppose that
$\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$, suppose that  $\hat C_{k_1}$ or
$\hat C_{k_1}$ or  $\hat C_{k_2}$ is Schur-concave and
$\hat C_{k_2}$ is Schur-concave and  $\hat C_{k_1} \prec \hat C_{k_2}$,
$\hat C_{k_1} \prec \hat C_{k_2}$,  $k_1 < k_2$. If
$k_1 < k_2$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $U_{k_1 } \le _{\textrm {st}} U_{k_2}$.
$U_{k_1 } \le _{\textrm {st}} U_{k_2}$.
Remark 3 Theorem 3 manifests that a two-series–parallel system is more reliable with respect to the usual stochastic order for a bigger  $k$. It should be noted that Theorem 3 generalizes Theorem 3.1 in El-Neweihi et al. [Reference El-Neweihi, Proschan and Sethuraman19] to the case of the dependent subsystems.
$k$. It should be noted that Theorem 3 generalizes Theorem 3.1 in El-Neweihi et al. [Reference El-Neweihi, Proschan and Sethuraman19] to the case of the dependent subsystems.
By the transitivity of the usual stochastic orders, the following corollary follows immediately from Theorem 3.
Corollary 3 For  $\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and
$\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and  $\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$, suppose that
$\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$, suppose that  $n-1$ copulas of
$n-1$ copulas of  $\hat C_{j}\ (j=1,\ldots , n)$ are Schur-concave, and
$\hat C_{j}\ (j=1,\ldots , n)$ are Schur-concave, and  $C_{k}\leq C_{k+1}\ (k=1,2,\ldots ,n-1)$. If
$C_{k}\leq C_{k+1}\ (k=1,2,\ldots ,n-1)$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\alpha _{i:n} \ge \beta _{i:n}$, i = 2,3,…,n, then
$\alpha _{i:n} \ge \beta _{i:n}$, i = 2,3,…,n, then
 $$U_1 \le_{\textrm{st}} U_2 \le_{\textrm{st}} \cdots \le_{\textrm{st}} U_n.$$
$$U_1 \le_{\textrm{st}} U_2 \le_{\textrm{st}} \cdots \le_{\textrm{st}} U_n.$$ In accordance with Corollary 3,  $b_1$ is the worst allocation policy and
$b_1$ is the worst allocation policy and  $b_n$ is the optimal allocation policy within all possible allocations.
$b_n$ is the optimal allocation policy within all possible allocations.
4.2. Independence case
When the lifetimes of two subsystems are independent, the reliability function of the two-series–parallel system can be expressed as
 $${{\bar H}}_U(k;x)= (1- F^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i} ) (1- F^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i} ).$$
$${{\bar H}}_U(k;x)= (1- F^{\sum_{i=1}^{k}\alpha_i+\sum_{i=k+1}^{n}\beta_i} ) (1- F^{\sum_{i=1}^{k}\beta_i+\sum_{i=k+1}^{n}\alpha_i} ).$$Now, we develop some sufficient conditions for the reversed hazard rate and the hazard rate orders of the two-series–parallel system.
Theorem 4 For  $\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and
$\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and  $\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$. If
$\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $k_1 < k_2$ implies
$k_1 < k_2$ implies
(i)
$U_{k_1 } \le _{\textrm {rh}} U_{k_2}$ and(ii)
$U_{k_1 } \le _{\textrm {hr}} U_{k_2}$.


Proof. (i) Note that the distribution functions of  $U_{lk}$ and
$U_{lk}$ and  $U_{rk}$ are given by
$U_{rk}$ are given by
 $$F_{U_l}(k;x)=[F(x)]^{\sum_{i=1}^{k}\alpha_{i:n}+\sum_{i=k+1}^{n}\beta_{i:n}} \quad \text{and}\quad F_{U_r}(k;x)=[F(x)]^{\sum_{i=1}^{k}\beta_{i:n}+\sum_{i=k+1}^{n}\alpha_{i:n}},$$
$$F_{U_l}(k;x)=[F(x)]^{\sum_{i=1}^{k}\alpha_{i:n}+\sum_{i=k+1}^{n}\beta_{i:n}} \quad \text{and}\quad F_{U_r}(k;x)=[F(x)]^{\sum_{i=1}^{k}\beta_{i:n}+\sum_{i=k+1}^{n}\alpha_{i:n}},$$respectively. In order to obtain the desired result, let  $\tilde {U}_{lk}=1/U_{lk}$ and
$\tilde {U}_{lk}=1/U_{lk}$ and  $\tilde {U}_{rk}=1/U_{rk}$, then
$\tilde {U}_{rk}=1/U_{rk}$, then
 \begin{align*} {{\bar F}}_{\tilde{U}_l}(k;x)&= \mathbb{P}(1/U_{lk}>x) =\mathbb{P}\left(U_{lk}<\frac{1}{x}\right)\\ & =F_{{ U}_l}\left(k;\frac{1}{x}\right)=\left[F\left(\frac{1}{x}\right)\right]^{\sum_{i=1}^{k}\alpha_{i:n}+\sum_{i=k+1}^{n}\beta_{i:n}} \end{align*}
\begin{align*} {{\bar F}}_{\tilde{U}_l}(k;x)&= \mathbb{P}(1/U_{lk}>x) =\mathbb{P}\left(U_{lk}<\frac{1}{x}\right)\\ & =F_{{ U}_l}\left(k;\frac{1}{x}\right)=\left[F\left(\frac{1}{x}\right)\right]^{\sum_{i=1}^{k}\alpha_{i:n}+\sum_{i=k+1}^{n}\beta_{i:n}} \end{align*}and
 $$F\left(\frac{1}{x}\right)=\mathbb{P}\left(X \le \frac{1}{x}\right)=\mathbb{P}(1/X\ge x)={{\bar F}}_0(x).$$
$$F\left(\frac{1}{x}\right)=\mathbb{P}\left(X \le \frac{1}{x}\right)=\mathbb{P}(1/X\ge x)={{\bar F}}_0(x).$$ Hence, the survival functions of  $\tilde {U}_{lk}$ and
$\tilde {U}_{lk}$ and  $\tilde {U}_{rk}$ can be expressed by
$\tilde {U}_{rk}$ can be expressed by
 $${{\bar F}}_{\tilde{U}_l}(k;x)=[{{\bar F}}_0(x)]^{\sum_{i=1}^{k}\alpha_{i:n}+\sum_{i=k+1}^{n}\beta_{i:n}}$$
$${{\bar F}}_{\tilde{U}_l}(k;x)=[{{\bar F}}_0(x)]^{\sum_{i=1}^{k}\alpha_{i:n}+\sum_{i=k+1}^{n}\beta_{i:n}}$$and
 $${{\bar F}}_{\tilde{U}_r}(k;x)=[{{\bar F}}_0(x)]^{\sum_{i=1}^{k}\beta_{i:n}+\sum_{i=k+1}^{n}\alpha_{i:n}},$$
$${{\bar F}}_{\tilde{U}_r}(k;x)=[{{\bar F}}_0(x)]^{\sum_{i=1}^{k}\beta_{i:n}+\sum_{i=k+1}^{n}\alpha_{i:n}},$$respectively. Obviously,  $\tilde {U}_{lk}$ and
$\tilde {U}_{lk}$ and  $\tilde {U}_{rk}$ follow the PH model. Let
$\tilde {U}_{rk}$ follow the PH model. Let  $\tilde U=\max \{\tilde U_{lk}, \tilde U_{rk}\}$, according to (i) of Theorem 2, we have
$\tilde U=\max \{\tilde U_{lk}, \tilde U_{rk}\}$, according to (i) of Theorem 2, we have  $\tilde U_{k_1} \ge _{\textrm {hr}} \tilde U_{k_2}$, which is equivalent to
$\tilde U_{k_1} \ge _{\textrm {hr}} \tilde U_{k_2}$, which is equivalent to
 $$R_{\tilde U}(k_1,k_2; x) =\frac{{{\bar H}}_{\tilde{U}}({k_1};x)}{{{\bar H}}_{\tilde{U}}({k_2};x)} =\frac{H_{{U}}\left({k_1};\frac{1}{x}\right)}{H_{{U}}\left({k_2};\frac{1}{x}\right)} =R_{U}\left(k_1,k_2; \frac{1}{x}\right)$$
$$R_{\tilde U}(k_1,k_2; x) =\frac{{{\bar H}}_{\tilde{U}}({k_1};x)}{{{\bar H}}_{\tilde{U}}({k_2};x)} =\frac{H_{{U}}\left({k_1};\frac{1}{x}\right)}{H_{{U}}\left({k_2};\frac{1}{x}\right)} =R_{U}\left(k_1,k_2; \frac{1}{x}\right)$$is increasing in  $x \in \mathbb {R}^{+}$, and thus
$x \in \mathbb {R}^{+}$, and thus
 $$R_{U}(k_1,k_2; x)=\frac{H_{{U}}({k_1};x)}{H_{{U}}({k_2};x)}$$
$$R_{U}(k_1,k_2; x)=\frac{H_{{U}}({k_1};x)}{H_{{U}}({k_2};x)}$$is decreasing in  $x \in \mathbb {R}^{+}$, that is,
$x \in \mathbb {R}^{+}$, that is,  $U_{k_1 } \le _{\textrm {rh}} U_{k_2}$. The desired result (i) is proved.
$U_{k_1 } \le _{\textrm {rh}} U_{k_2}$. The desired result (i) is proved.
(ii) The proof of (ii) is similar to that of (i), and thus is omitted here.
Remark 4 Theorem 4 indicates that the two-series–parallel system is more unreliable in terms of the reversed hazard rate order and the hazard rate order when two subsystems are as unbalancing as possible. It should be pointed out that Theorem 4 extends Theorem VI.1 of Laniado and Lillo [Reference Laniado and Lillo30] to the case of the heterogeneous components.
Example 3 Under the assumptions of Theorems 3 and 4, let  $F(x)$ be a Fréchet distribution, that is,
$F(x)$ be a Fréchet distribution, that is,  $F(x)=e^{-({x}/{\lambda })^{-\gamma }}$. Set
$F(x)=e^{-({x}/{\lambda })^{-\gamma }}$. Set  $\boldsymbol {\alpha }=(0.1, 0.9, 1.3, 1.7)\stackrel {\textrm {{m}}}{\succeq }(0.4,0.8,1.2,1.6)=\boldsymbol {\beta }$.
$\boldsymbol {\alpha }=(0.1, 0.9, 1.3, 1.7)\stackrel {\textrm {{m}}}{\succeq }(0.4,0.8,1.2,1.6)=\boldsymbol {\beta }$.
(i) Assume that subsystems
$U_1$ and $U_2$ have the Clayton survival copula as (1)
Setting$$\hat C_{\theta_j}(u_{1},u_{2}) =(u_1^{-\theta_j}+u_2^{-\theta_j}-1)^{{-}1/\theta_j}, \quad u_{1} ,u_{2}\in [0,1] \text{ and } \theta_j\in(0,+\infty).$$$\gamma =0.3, \lambda =2, \theta _1=0.1, \theta _2=0.2, \theta _3=0 .7$, and $\theta _4=0.8$. From Figure 5(a), we can see that all the difference functions ${{\bar H}}_{U}(k_{i+1};x)- {{\bar H}}_{U}(k_{i};x)$ are always non-negative, $i=1,2,3$, which justifies the validity of the result in Theorem 3.(ii) Taking
$\gamma _1=0.2, \lambda _1=0.1$ with remaining conditions unchanged. Figure 5(b) and 5(c) presents the plots of the difference functions $h_{U}(k_{i};x)-h_{U}(k_{i+1};x)$ and $\tilde {r}_{U}(k_{i+1};x)-\tilde {r}_{U}({k_{i}};x)$, respectively, which are always non-negative, $i=1,2,3$. Thus, the result of Theorem 4 is verified.












FIGURE 5. Plots of the difference functions  ${{\bar H}}_{U}(k_{i+1};x)- {{\bar H}}_{U}(k_{i};x)$,
${{\bar H}}_{U}(k_{i+1};x)- {{\bar H}}_{U}(k_{i};x)$,  $h_{U}(k_{i};x)-h_{U}(k_{i+1};x)$ and
$h_{U}(k_{i};x)-h_{U}(k_{i+1};x)$ and  $\tilde {r}_{U}(k_{i+1};x)-\tilde {r}_{U}({k_{i}};x),\ i=1,2,3$, for all
$\tilde {r}_{U}(k_{i+1};x)-\tilde {r}_{U}({k_{i}};x),\ i=1,2,3$, for all  $x=-\ln u$ and
$x=-\ln u$ and  $u\in (0,1]$.
$u\in (0,1]$.
Similar to Corollary 2, from Theorem 4, we have the following Corollary.
Corollary 4 For  $\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and
$\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }, F)$ and  $\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$. If
$\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }, F)$. If  $\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and
$\boldsymbol {\alpha }\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }$ and  $\alpha _{i:n} \ge \beta _{i:n}$, i = 2,3,…,n, then
$\alpha _{i:n} \ge \beta _{i:n}$, i = 2,3,…,n, then
(i)
$U_1 \le _{\textrm {rh}} U_2 \le _{\textrm {rh}} \cdots \le _{\textrm {rh}} U_n$ and(ii)
$U_1 \le _{\textrm {hr}} U_2 \le _{\textrm {hr}} \cdots \le _{\textrm {hr}} U_n$.


According to Corollary 4,  $b_1$ is the worst allocation policy and
$b_1$ is the worst allocation policy and  $b_n$ is the optimal allocation policy within all possible allocations.
$b_n$ is the optimal allocation policy within all possible allocations.
5. Optimal allocations of the coherent system
In this section, we try to generalize the results obtained in the previous sections to parallel–series and series–parallel systems with multiple subsystems in view of minimal path sets and minimal cut sets, respectively. To provide these extensions, we need to introduce some notions of the classical work of Barlow and Proschan [Reference Barlow and Proschan1]. A system is called coherent if the system structure function  $\tau$ is increasing in each component and each component is relevant. In other words, any improvement of a component cannot decrease the lifetime of the system. The minimal path sets and the minimal cut sets play a vital role in characterizing the lifetime of the coherent system. A minimal path set is a collection of components such that the system works if all the components in the collection work and it fails if one of them fails along with all components outside the collection. Suppose that there are
$\tau$ is increasing in each component and each component is relevant. In other words, any improvement of a component cannot decrease the lifetime of the system. The minimal path sets and the minimal cut sets play a vital role in characterizing the lifetime of the coherent system. A minimal path set is a collection of components such that the system works if all the components in the collection work and it fails if one of them fails along with all components outside the collection. Suppose that there are  $l$ minimal path sets
$l$ minimal path sets  $P_1, P_2,\ldots , P_l$ in a coherent system, then the lifetime of the coherent system with component lifetimes
$P_1, P_2,\ldots , P_l$ in a coherent system, then the lifetime of the coherent system with component lifetimes  $\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ can be given by
$\boldsymbol {X}=(X_1,X_2,\ldots ,X_n)$ can be given by
 $$\tau(\boldsymbol{X})=\max_{1\le j\le l} \min_{i\in P_{j}} X_{i}, \quad 1 \le l \le n.$$
$$\tau(\boldsymbol{X})=\max_{1\le j\le l} \min_{i\in P_{j}} X_{i}, \quad 1 \le l \le n.$$ A collection of components is a cut if their failures cause the system failure, and the one such that any its subset is not a cut any more is called a minimal cut. Suppose that there are  $s$ minimal cut sets
$s$ minimal cut sets  $C_1, C_2,\ldots , C_s$, then the lifetime of a coherent system can be represented as
$C_1, C_2,\ldots , C_s$, then the lifetime of a coherent system can be represented as
 $$\tau(\boldsymbol{X})=\min_{1\le j\le s} \max_{i\in C_{j}} X_{i}, \quad 1 \le s \le n.$$
$$\tau(\boldsymbol{X})=\min_{1\le j\le s} \max_{i\in C_{j}} X_{i}, \quad 1 \le s \le n.$$5.1. Viewpoint of the minimal path sets
In this subsection, we investigate the allocation policies of a parallel–series system with multiple subsystems in the viewpoint of the minimal path sets. Consider a parallel–series system having structure function  $\tau$, and minimal path sets
$\tau$, and minimal path sets  $P_1, P_2,\ldots , P_l$. For convenience, denote the lifetime of minimal set
$P_1, P_2,\ldots , P_l$. For convenience, denote the lifetime of minimal set  $P_j$ by
$P_j$ by  $W_j$, where
$W_j$, where  $W_j=\min _{i\in P_{j}}X_{i}$,
$W_j=\min _{i\in P_{j}}X_{i}$,  $1\le j\le l$. Suppose that there are two classes of independent components
$1\le j\le l$. Suppose that there are two classes of independent components  $A_1,A_2,\ldots ,A_n$ and
$A_1,A_2,\ldots ,A_n$ and  $B_1,B_2,\ldots ,B_n$ with lifetimes vectors
$B_1,B_2,\ldots ,B_n$ with lifetimes vectors  $\boldsymbol {X}=(X_1, X_2,\ldots ,X_n)$ and
$\boldsymbol {X}=(X_1, X_2,\ldots ,X_n)$ and  $\boldsymbol {Y}=(Y_1, Y_2,\ldots ,Y_n)$ to be allocated, respectively. For two disjoint minimal path sets
$\boldsymbol {Y}=(Y_1, Y_2,\ldots ,Y_n)$ to be allocated, respectively. For two disjoint minimal path sets  $P_{p}$ and
$P_{p}$ and  $P_{q}$ (
$P_{q}$ ( $1 \le p < q \le l$), denote
$1 \le p < q \le l$), denote  $a_{\tau k}$ the policy that allocate
$a_{\tau k}$ the policy that allocate  $k$ components
$k$ components  $A_i(i=1,2,\ldots ,k)$ and
$A_i(i=1,2,\ldots ,k)$ and  $n-k$ components
$n-k$ components  $B_i(i=k+1,k+2,\ldots ,n)$ to minimal path sets
$B_i(i=k+1,k+2,\ldots ,n)$ to minimal path sets  $P_{p}$, and denote the corresponding copula of allocation policy
$P_{p}$, and denote the corresponding copula of allocation policy  $a_{\tau k}$ by
$a_{\tau k}$ by  $C_{ k}$,
$C_{ k}$,  $k=1,2,\ldots ,n,$ then the lifetime of the resulting system under allocation policy
$k=1,2,\ldots ,n,$ then the lifetime of the resulting system under allocation policy  $a_{\tau k}$ can be expressed by
$a_{\tau k}$ can be expressed by
 \begin{align} W_{\tau k}& = \max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, \max\{W_p, W_q \} \right\} \nonumber\\ & = \max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_k \right\}, \end{align}
\begin{align} W_{\tau k}& = \max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, \max\{W_p, W_q \} \right\} \nonumber\\ & = \max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_k \right\}, \end{align}where  $S_k=\max \{W_p, W_q \}$.
$S_k=\max \{W_p, W_q \}$.
In fact, there are situations where two disjoint minimal paths, two crossing minimal paths and a minimal path contains or is contained by another minimal path. Hence, owing to the complexity of modeling, we are ready to develop the main results in the following context:
A1:
${\rm A}1{\rm :}\; P_{1},P_{2},\ldots ,P_{l}$ are disjoint minimal path sets, that is, for $1\leq i\neq j\leq l, P_i\bigcap P_j=\emptyset$;A2: A2: There exist two minimal path sets
$P_{p}$ and $P_{q}$ having the same numbers of components;A3: A3: The component lifetime vectors in the minimal path sets
$P_{p}$ and $P_{q}$ both follow the PH model, that is, $\boldsymbol {X} \sim \textrm {PH} (\boldsymbol {\alpha }_{P_p}, {{\bar F}})$ and $\boldsymbol {Y} \sim \textrm {PH}(\boldsymbol {\beta }_{P_q}, {{\bar F}})$.








Next, we present some sufficient conditions in the sense of the usual stochastic order for two disjoint minimal path sets.
Theorem 5 Under the context of A1, A2 and A3. Suppose that  $C_{k_1}$ or
$C_{k_1}$ or  $C_{k_2}$ is Schur-concave, and
$C_{k_2}$ is Schur-concave, and  $C_{k_1} \prec C_{k_2}$,
$C_{k_1} \prec C_{k_2}$,  $k_1 < k_2$. If
$k_1 < k_2$. If  $\boldsymbol {\alpha }_{P_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{P_q}$ and
$\boldsymbol {\alpha }_{P_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{P_q}$ and  $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $W_{\tau k_1 } \ge _{\textrm {st}} W_{\tau k_2}$.
$W_{\tau k_1 } \ge _{\textrm {st}} W_{\tau k_2}$.
Proof. The idea of the proof is borrowed from Theorem 1 of Belzunce et al. [Reference Belzunce, Martínez-Riquelme and Ruiz4]. According to (6), the lifetime of the parallel–series system under two different allocation policies  $a_{\tau k_1}$ and
$a_{\tau k_1}$ and  $a_{\tau k_2}$ can be written as
$a_{\tau k_2}$ can be written as
 $$W_{\tau k_j} =\max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_{k_j} \right\}, \quad j=1,2.$$
$$W_{\tau k_j} =\max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_{k_j} \right\}, \quad j=1,2.$$ Since the structure function  $\tau$ is an increasing function, thus, according to Theorem 1 and the usual stochastic order with respect to the preservation property of increasing function, it follows that
$\tau$ is an increasing function, thus, according to Theorem 1 and the usual stochastic order with respect to the preservation property of increasing function, it follows that
 $$\max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_{k_1} \right\} \ge_{\textrm{st}} \max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_{k_2} \right\},$$
$$\max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_{k_1} \right\} \ge_{\textrm{st}} \max \left\{\max_{1\le m\le l,m\neq p, q} \{W_{m}\}, S_{k_2} \right\},$$which implies  $W_{\tau k_1} \ge _{\textrm {st}} W_{\tau k_2}$, yielding the desired result.
$W_{\tau k_1} \ge _{\textrm {st}} W_{\tau k_2}$, yielding the desired result.
In combination with the result of Theorem 2, it is easy to obtain the following Theorem 6 in terms of the reversed hazard rate order, the proof is similar to that of Theorem 5, thus is omitted here.
Theorem 6 Under the context of A1, A2 and A3. If  $\boldsymbol {\alpha }_{P_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{P_q}$ and
$\boldsymbol {\alpha }_{P_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{P_q}$ and  $\sum _{i=k_1+1}^{k_2} \alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2} \alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $k_1 < k_2$ implies
$k_1 < k_2$ implies
 $$W_{\tau k_1 } \ge_{\textrm{rh}} W_{\tau k_2}.$$
$$W_{\tau k_1 } \ge_{\textrm{rh}} W_{\tau k_2}.$$The following example is presented to illustrate Theorems 5 and 6.
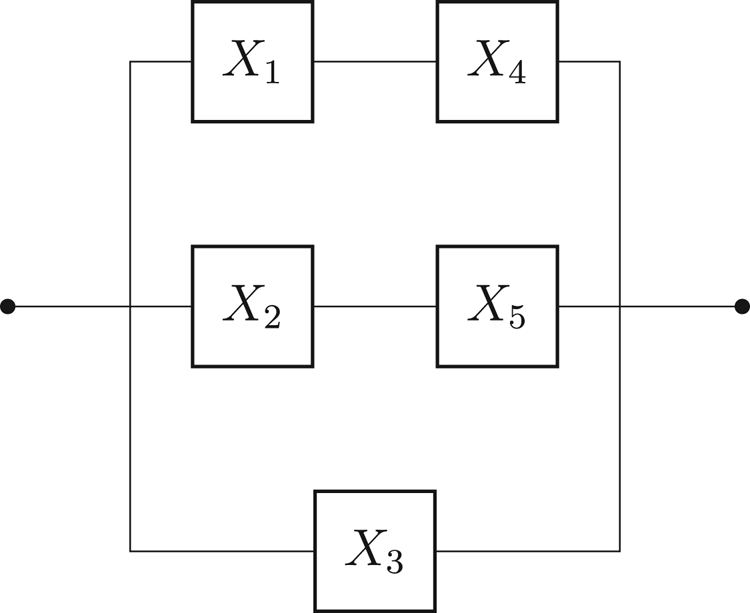
Example 4 Consider a parallel–series system as shown in Figure 6, its lifetime is
 $$W= \max \{\min\{X_1, X_4 \}, X_3, \min\{X_2, X_5\} \}.$$
$$W= \max \{\min\{X_1, X_4 \}, X_3, \min\{X_2, X_5\} \}.$$
FIGURE 6. Parallel–series system.
The minimal path sets of the system are  $P_1 = \{1, 4\}$,
$P_1 = \{1, 4\}$,  $P_2 = \{3\}$ and
$P_2 = \{3\}$ and  $P_3 = \{2,5\}$. Let
$P_3 = \{2,5\}$. Let  $\bar F_i(x)=[\bar F(x)]^{a_i}$ be the survival function of
$\bar F_i(x)=[\bar F(x)]^{a_i}$ be the survival function of  $X_i$, where
$X_i$, where  $\bar F(x)=e^{-\lambda x}$,
$\bar F(x)=e^{-\lambda x}$,  $i=1,2,3,4,5$. Set
$i=1,2,3,4,5$. Set  $\lambda =0.02$,
$\lambda =0.02$,  $a_1=3, a_2=4, a_3=2, a_4=6$,
$a_1=3, a_2=4, a_3=2, a_4=6$,  $a_5=5$. For two minimal path sets
$a_5=5$. For two minimal path sets  $P_1$ and
$P_1$ and  $P_3$, we can check that
$P_3$, we can check that  $\boldsymbol {\alpha }_{P_1}=(3, 6)\stackrel {\textrm {{m}}}{\succeq }(4,5)=\boldsymbol {\beta }_{P_3}$.
$\boldsymbol {\alpha }_{P_1}=(3, 6)\stackrel {\textrm {{m}}}{\succeq }(4,5)=\boldsymbol {\beta }_{P_3}$.
(i) Suppose that  $P_{1}$,
$P_{1}$,  $P_{2}$ and
$P_{2}$ and  $P_3$ has FGM copula
$P_3$ has FGM copula
 $$C_{\theta_j}(u_{1},u_{2},u_{3})=\prod_{i=1}^{3}u_{i}+\theta_j\prod_{i=1}^{3}u_{i}(1-u_{i}), \quad u_{i} \in [0,1 ] \text{ and }\theta_j\in[{-}1,1].$$
$$C_{\theta_j}(u_{1},u_{2},u_{3})=\prod_{i=1}^{3}u_{i}+\theta_j\prod_{i=1}^{3}u_{i}(1-u_{i}), \quad u_{i} \in [0,1 ] \text{ and }\theta_j\in[{-}1,1].$$ Set  $\theta _1=-0.8$,
$\theta _1=-0.8$,  $\theta _2=0.9$. As Figure 7(a) displays,
$\theta _2=0.9$. As Figure 7(a) displays,  $W_{\tau k_1 } \ge _{\textrm {st}} W_{\tau k_2}$.
$W_{\tau k_1 } \ge _{\textrm {st}} W_{\tau k_2}$.

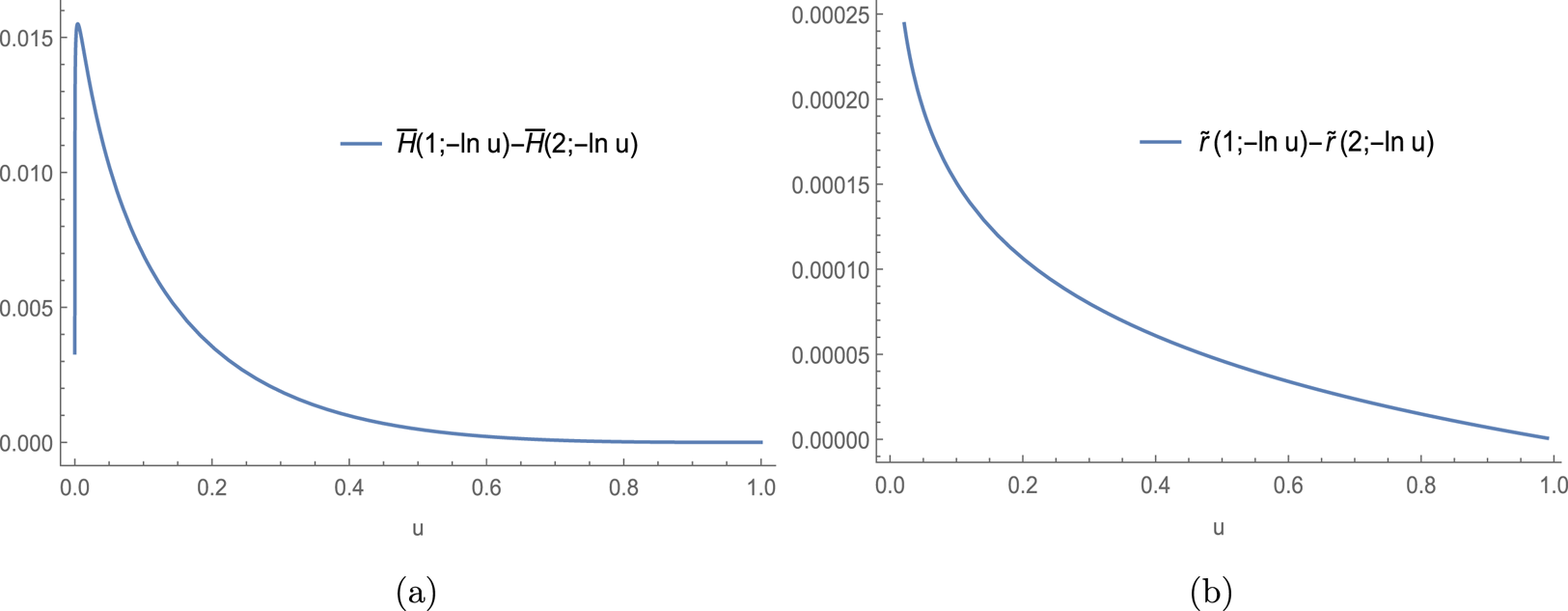
FIGURE 7. Plots of the difference functions (a)  $\bar H_{W}(1;-\ln u)- \bar H_{W}(2;-\ln u)$ and (b)
$\bar H_{W}(1;-\ln u)- \bar H_{W}(2;-\ln u)$ and (b)  $\tilde {r}_{W}(1;-\ln u)-\tilde {r}_{W}(2;-\ln u)$, for all
$\tilde {r}_{W}(1;-\ln u)-\tilde {r}_{W}(2;-\ln u)$, for all  $x=-\ln u$ and
$x=-\ln u$ and  $u\in (0,1]$.
$u\in (0,1]$.
(ii) As shown in Figure 7(b),  $\tilde {r}_{W}(1;-\ln u)-\tilde {r}_{W}(2;-\ln u)$ is always non-negative.
$\tilde {r}_{W}(1;-\ln u)-\tilde {r}_{W}(2;-\ln u)$ is always non-negative.
5.2. Viewpoint of the minimal cut sets
In parallel to the previous subsection, here, we study the allocation policies of a series–parallel system in the viewpoint of the minimal cut sets. Consider a series–parallel system having structure function  $\tau$, and minimal cut sets
$\tau$, and minimal cut sets  $C_1, C_2,\ldots , C_s$. For converience, we denote the lifetime of minimal set
$C_1, C_2,\ldots , C_s$. For converience, we denote the lifetime of minimal set  $C_j$ by
$C_j$ by  $Z_j$, where
$Z_j$, where  $Z_j=\max _{i\in C_{j}}X_{i}$,
$Z_j=\max _{i\in C_{j}}X_{i}$,  $1\le j\le s$. For two disjoint minimal cut sets
$1\le j\le s$. For two disjoint minimal cut sets  $C_{p}$ and
$C_{p}$ and  $C_{q}$ (
$C_{q}$ ( $1 \le p < q \le s$), denote the allocation policy with
$1 \le p < q \le s$), denote the allocation policy with  $k$ components
$k$ components  $A_i\ (i=1,2,\ldots ,k)$ and
$A_i\ (i=1,2,\ldots ,k)$ and  $n-k$ components
$n-k$ components  $B_i\ (i=k+1,k+2,\ldots ,n)$ being allocated to minimal cut sets
$B_i\ (i=k+1,k+2,\ldots ,n)$ being allocated to minimal cut sets  $C_{p}$ by
$C_{p}$ by  $b_{\tau k}$, and denote the corresponding survival copula of allocation policy
$b_{\tau k}$, and denote the corresponding survival copula of allocation policy  $b_{\tau k}$ by
$b_{\tau k}$ by  $\hat C_{ k}$,
$\hat C_{ k}$,  $k=1,2,\ldots ,n,$ then lifetime of the resulting system under allocation policy
$k=1,2,\ldots ,n,$ then lifetime of the resulting system under allocation policy  $b_{\tau k}$ can be written as
$b_{\tau k}$ can be written as
 \begin{align} Z_{\tau k} & = \min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, \min\{Z_p, Z_q \} \right\} \nonumber\\ & = \min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_k \right\}, \end{align}
\begin{align} Z_{\tau k} & = \min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, \min\{Z_p, Z_q \} \right\} \nonumber\\ & = \min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_k \right\}, \end{align}where  $U_k=\min \{Z_p, Z_q \}$.
$U_k=\min \{Z_p, Z_q \}$.
In general, for two minimal cuts, they may be disjoint, crossing or a minimal cut contains or is contained another minimal cut. Hence, owing to the complexity of modeling, we investigate the allocation policies of the coherent system in the following context:
B1:
${\rm B}1{\rm :} \;C_1, C_2,\ldots , C_s$ are disjoint minimal cut sets, that is, for $1\leq i\neq j\leq l, C_i\cap C_j=\emptyset$;B2: B2: There exist two minimal cut sets
$C_{p}$ and $C_{q}$ having the same numbers of components;B3: B3: The component lifetime vectors in the minimal cut sets
$C_{p}$ and $C_{q}$ both follow the PRH model, that is, $\boldsymbol {X} \sim \textrm {PRH} (\boldsymbol {\alpha }_{C_p}, F)$ and $\boldsymbol {Y} \sim \textrm {PRH}(\boldsymbol {\beta }_{C_q}, F)$.








Theorem 7 Under the context of B1, B2 and B3. Suppose that  $\hat C_{k_1}$ or
$\hat C_{k_1}$ or  $\hat C_{k_2}$ is Schur-concave and
$\hat C_{k_2}$ is Schur-concave and  $\hat C_{k_1} \prec \hat C_{k_2}$,
$\hat C_{k_1} \prec \hat C_{k_2}$,  $k_1 < k_2$. If
$k_1 < k_2$. If  $\boldsymbol {\alpha }_{C_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{C_q}$ and
$\boldsymbol {\alpha }_{C_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{C_q}$ and  $\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2}\alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $Z_{\tau k_1 } \le _{\textrm {st}} Z_{\tau k_2}$.
$Z_{\tau k_1 } \le _{\textrm {st}} Z_{\tau k_2}$.
Proof. By means of (7), the lifetimes of the series–parallel system under two different allocation policies  $b_{\tau {k_1}}$ and
$b_{\tau {k_1}}$ and  $b_{\tau {k_2}}$ can be expressed by
$b_{\tau {k_2}}$ can be expressed by
 $$Z_{k_j} =\min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_{k_j} \right\}, \quad j=1,2.$$
$$Z_{k_j} =\min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_{k_j} \right\}, \quad j=1,2.$$ Owing to the structure function,  $\tau$ is an increasing function, hence, combining Theorem 4 with the usual stochastic order with respect to the preservation property of increasing function, it holds that
$\tau$ is an increasing function, hence, combining Theorem 4 with the usual stochastic order with respect to the preservation property of increasing function, it holds that
 $$\min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_{k_1} \right\} \le_{\textrm{st}} \min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_{k_2} \right\},$$
$$\min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_{k_1} \right\} \le_{\textrm{st}} \min \left\{\min_{1\le m\le s,m\neq p, q} \{Z_{m}\}, U_{k_2} \right\},$$which means that  $Z_{\tau k_1} \le _{\textrm {st}} Z_{\tau k_2}$. Hence, the result is proved.
$Z_{\tau k_1} \le _{\textrm {st}} Z_{\tau k_2}$. Hence, the result is proved.
The following theorem provides the results with respect to the hazard rate order. The proof can be obtained along the same line as in Theorem 7 and is hence omitted.
Theorem 8 Under the context of B1, B2 and B3. If  $\boldsymbol {\alpha }_{C_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{C_q}$ and
$\boldsymbol {\alpha }_{C_p}\stackrel {\textrm {{m}}}{\succeq }\boldsymbol {\beta }_{C_q}$ and  $\sum _{i=k_1+1}^{k_2} \alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then
$\sum _{i=k_1+1}^{k_2} \alpha _{i:n} \ge \sum _{i=k_1+1}^{k_2}\beta _{i:n}$, then  $k_1 < k_2$ implies
$k_1 < k_2$ implies
 $$Z_{\tau k_1 } \le_{\textrm{hr}} Z_{\tau k_2}.$$
$$Z_{\tau k_1 } \le_{\textrm{hr}} Z_{\tau k_2}.$$The next example gives some illustrations of Theorems 7 and 8.
Example 5 Consider a series–parallel system as shown in Figure 8, its lifetime is
 $$Z= \min \{\max\{X_1, X_2 \}, X_3, \max\{ X_4, X_5 \} \}.$$
$$Z= \min \{\max\{X_1, X_2 \}, X_3, \max\{ X_4, X_5 \} \}.$$The minimal cut sets are  $C_1 = \{1, 2\}$,
$C_1 = \{1, 2\}$,  $C_2 = \{3\}$ and
$C_2 = \{3\}$ and  $C_3 = \{4, 5\}$. Let
$C_3 = \{4, 5\}$. Let  $F_i(x)=[F(x)]^{b_i}$ be the distribution function of
$F_i(x)=[F(x)]^{b_i}$ be the distribution function of  $X_i$, where
$X_i$, where  $F(x)=e^{-({x}/{\lambda })^{-\gamma }}$,
$F(x)=e^{-({x}/{\lambda })^{-\gamma }}$,  $i=1,2,3,4,5$. Set
$i=1,2,3,4,5$. Set  $\lambda =1$,
$\lambda =1$,  $\gamma =0.1$,
$\gamma =0.1$,  $b_1=3$,
$b_1=3$,  $b_2=6$,
$b_2=6$,  $b_3=2$,
$b_3=2$,  $b_4=4$,
$b_4=4$,  $b_5=5$. For two minimal cut sets
$b_5=5$. For two minimal cut sets  $C_1$ and
$C_1$ and  $C_3$, it is easily checked that
$C_3$, it is easily checked that  $\boldsymbol {\alpha }_{C_1}=(3, 6)\stackrel{ \textrm {{m}}}{\succeq }(4,5)=\boldsymbol {\beta }_{C_3}$.
$\boldsymbol {\alpha }_{C_1}=(3, 6)\stackrel{ \textrm {{m}}}{\succeq }(4,5)=\boldsymbol {\beta }_{C_3}$.

FIGURE 8. Series–parallel system.
(i) Suppose that  $C_1$,
$C_1$,  $C_2$ and
$C_2$ and  $C_3$ have Clayton copula
$C_3$ have Clayton copula
 $$\hat C_{\theta_j}(u_{1},u_{2},u_{3})=\left(\sum_{i=1}^{3} u_{i}^{-\theta_j}-2 \right)^{{-}1/\theta_j}, \quad u_{i} \in [0,1 ],\ \theta_j \in (0, \infty),\ j=1, 2.$$
$$\hat C_{\theta_j}(u_{1},u_{2},u_{3})=\left(\sum_{i=1}^{3} u_{i}^{-\theta_j}-2 \right)^{{-}1/\theta_j}, \quad u_{i} \in [0,1 ],\ \theta_j \in (0, \infty),\ j=1, 2.$$ Set  $\theta _1=6$,
$\theta _1=6$,  $\theta _2=8$. As displayed in Figure 9(a),
$\theta _2=8$. As displayed in Figure 9(a),  $\bar H_{Z}(2;x)- \bar H_{Z}(1;x)$ is always non-negative.
$\bar H_{Z}(2;x)- \bar H_{Z}(1;x)$ is always non-negative.

FIGURE 9. Plots of the difference functions (a)  $\bar H_{Z}(2;x)- \bar H_{Z}(1;x)$ and (b)
$\bar H_{Z}(2;x)- \bar H_{Z}(1;x)$ and (b)  $h_{Z}(1;x)-h_{Z}(2;x)$, for all
$h_{Z}(1;x)-h_{Z}(2;x)$, for all  $x=-\ln u$ and
$x=-\ln u$ and  $u\in (0,1]$.
$u\in (0,1]$.
(ii) As Figure 9(b) shows,  $h_{Z}(1;x)-h_{Z}(2;x)$ is always non-negative.
$h_{Z}(1;x)-h_{Z}(2;x)$ is always non-negative.
6. Conclusion
In this paper, we developed the optimal allocation policy for two-parallel–series system and two-series–parallel system consisting of dependent subsystems with independent and heterogeneous components with respect to the usual stochastic order, the hazard rate order and the reversed hazard rate order under some certain conditions. The obtained results indicate that the reliability of the two-parallel–series system will be increased by unbalancing the components as much as possible, and the performance of the two-series–parallel system will be improved when both subsystems are allocated to be more similar. Finally, we popularize the corresponding stochastic comparisons to parallel–series and series–parallel systems with multiple subsystems in the viewpoint of the minimal path and the minimal cut sets, respectively.
As described by [Reference Fang, Balakrishnan and Jin21], the components of the subsystem may be interdependent. In fact, it will be of great interest to investigate the optimal allocation policy of a coherent system with dependent components. However, owing to the complexity of modeling for the interdependent systems with dependent components, these problems remain open and merit further discussion. It is also of interest to investigate whether the results similar to the ones obtained in this paper hold for other stochastic orders, such as the (reversed) hazard rate order and the likelihood ratio order.
Acknowledgments
The authors thank the insightful and helpful comments and suggestions from the Editor and two anonymous reviewers, which have greatly improved the presentation of this manuscript. All authors contribute equally to this work and acknowledge the financial support of the National Natural Science Foundation of China (No. 11861058 and No.71471148).
Conflict of interest
The authors declare that they have no conflict of interest.