


Introduction
Recent advances in imaging techniques capable of light microscopy resolutions below the Abbe diffraction limit have challenged microscopy equipment designers to pursue conflicting goals for components such as sample positioning and scanning stages and focusing mechanisms. For the super-resolution light microscopy, the positions of these components must be controlled in more degrees of freedom with higher dynamic and static accuracy, yet emerging applications demand higher speeds, finer resolutions, tighter synchronization, nanoscale stabilities, and longer travels to meet scientific and optical requirements. Meanwhile the practicality of today's tight budgetary situations cannot be overlooked, both in terms of purchase price and process throughput. Furthermore, of course, compactness is prized to facilitate close working distances and dense optical configurations.
These conflicting requirements have, until recently, had no solution. Fortunately, technical developments in the field of ultra-precision motion control have produced a wealth of new enabling technologies of relevance to microscopy.
Traditionally for ultra-precision/high-throughput/high-reliability applications such as these, piezoelectric actuation has been the default choice [Reference Pertsch, Richter, Kopsch, Kraemer, Pogodzik and Hennig1]. Similarly, when high force or high dynamics is required, piezoelectric actuation represents the gold standard. Piezo actuators have long been used in semiconductor manufacturing and testing applications for their extreme speed and precision. As post-diffraction-limited microscopy techniques have emerged in research and commercial applications, microscope manufacturers have embraced this actuator technology. This article describes some of the latest developments in long-travel motors and actuators.
Methods and Materials
Flexure-guided motion amplifiers. Traditional layered piezo ceramic actuators offer limited maximum travel, on the order of a few tens of micrometers. Fortunately, effective flexure lever-amplification approaches have been devised over many years that today provide travels up to about 2 mm (Figure 1). These wire-EDM-fabricated flexure designs help guide the workpiece while providing leverage multiplication of the piezo stack's expansion, yielding longer travels than the piezo stacks can provide. The downside is that the stiffness of lever mechanisms diminishes as the square of the lever ratio (Figure 2). This limits the bandwidth and thus the tracking performance of traditional servo-control techniques. So, demands for longer travels plus faster actuation or higher holding force are at cross-purposes.

Figure 1: Design principle of a flexure-driven XYZ piezo scanning stage for microscopy applications. Typical travel ranges for these stages are in the 200 μm travel range with resolution in the nanometer realm and below. Longer-travel piezo flexure stages up to 1.8 mm are also available today.

Figure 2: Schematic of basic lever amplification. This allows construction of flexure-guided mechanisms with travel longer than the approximately 0.1%-of-overall-length maximum throw limit for piezo stack actuators. Constructed properly, flexure lever amplification is frictionless, facilitating nanoscale repeatability.
Against this background, the inability of conventional controls to track a changing position command with high fidelity is especially limiting in scanning applications. On a millisecond-by-millisecond basis, a small but significant and variable position lag inevitably occurs between the position command and the actual position; this is called following error. Formerly, this error showed up as poorly repeatable scan patterns with rounding of sharp transitions. A serious consequence is the inability of the system to return to a point of interest that might have been observed in a fast, large-area scan. This problem is now addressable by novel controls technologies. Digital dynamic linearization (DDL), a non-traditional algorithm integrated into the latest digital nanopositioning controls, virtually eliminates following errors in repetitive motion patterns and the scanning of long-travel nanomechanisms.
The controller integrates the algorithm into the metrology and servo logic; this optimizes the internal command generated for a repetitive waveform according to the error signal detected with the internal sensor. A brief (typically <1 second) auto-optimization may be commanded by the user (or a reload of previously saved optimizations) when application changes occur. Thus, following errors can be reduced to approximately the noise level of the system, which may approach the scale of nanometers or better in systems with advanced seismic and acoustic isolation. This capability is supported by internal waveform generators and software drivers including dynamic link libraries and LabVIEW libraries.
In the past, granularity of the driving digital-to-analog converter was also an issue, but with the advent of a recently patented technique called HyperBit, resolution of well over 20 bits can be obtained even from older D/A converters or from those limited in available bitness as is often the case with popular multifunction I/O cards and USB units [Reference Jordan, Chen and Culpepper2].
Focusing applications in microscopy. In microscopy, a common application is Z-stack data acquisition, in which either the sample or the focusing lens is rapidly stepped or scanned along the optic axis. Piezo-mechanisms are the choice for this because of their combination of speed and precision. Flexure-guided positioners with amplified piezo actuators and new compact digital controllers provide cost-effective mechanisms with many hundreds of microns of travel and excellent precision (Figure 1). Incorporation of a position sensor such as a strain gauge or capacitive sensor allows the PZT actuation to be made highly linear and repeatable, and the user can thereby acquire position information synchronously with the microscopy data without stopping, ensuring a reliable and highly deterministic position-domain datum set [Reference Jordan and Marth3].
In these applications, a recent trend has been toward longer and longer scan travels; this is especially important for microscopy applications with large penetration depth, such as two-photon microscopy. Novel mechanisms that use new modalities of piezo actuation have been developed to cope with this requirement.
Multi-axis scanning motion for 3D imaging. Translational motion of the sample across the image field is a universal requirement in microscopy applications. Depending on the application, the required motions may be coarse, over the many mm of a slide or well plate, or they may be fine, with nanoscale precision over fractions of a mm. Very often, there is a requirement for both coarse and fine actuation, so that a region of interest can be brought into the field of view and scanned at high resolution [Reference Gloess4]. Moving the sample using a piezo-flexure stage offers benefits for applications requiring the highest resolution and the flattest scanning and positioning. For example, emerging scanned-probe microscopy applications in data storage and materials science increasingly demand sub-2nm resolution, repeatability, and flatness over scan distances of several hundred micrometers. Piezo-flexure stages for microscopy can provide up to 2 mm of scanning range. However, typically a less costly piezo stage of ~50–200 μm is stacked on top of a coarse positioning stage. By coarse we mean motion steps in the range of 100 nanometers, achievable by high-quality conventional motorized mechanisms, as opposed to the sub-nanometer capability, which ordinarily requires flexure-guided piezo-actuated stages [Reference Spanner and Vorndran5].
For the acquisition of 3D images in super-resolution microscopy, combinations of piezo-motorized stages and piezo-flexure stages (coarse/fine approach) have delivered exceptional results (Figures 3 and 4). It is however important, that the coarse stage (base) be very stiff, mechanically stable, and drift-free so as not to deteriorate the performance of the nanopositioning scanning stage (see Figures 5a and 5b).

Figure 3: Coarse/fine combination of a PInano XYZ piezo flexure scanning stage and an M-545 XY long-travel ultrasonic motor stage mounted on a microscope in the Bewersdorf lab at Yale University. Courtesy of Joerg Beversdorf, Travis Gould, David Zenisek, and Caixia Lv, Yale University.

Figure 4: Volume renderings of data scans (taken with PInano scanning stage) of RIM2, a synaptic ribbon protein, in a zebrafish retina section imaged by (top) confocal microscopy and (bottom) STED microscopy. Courtesy of Joerg Beversdorf, Travis Gould, David Zenisek, and Caixia Lv, Yale University.

Figure 5: (a) X, Y, and Z stability test data of another microscope manufacturer's long-travel stage. (b) Equivalent data for a PI M-545 long-travel microscope stage. Courtesy of Joerg Bewersdorf, Yale University.
A recent class of motors capable of long-travel actuation, without the stiffness disadvantage of highly leveraged stack actuators, is the piezo motor. There are several design principles now commercially available, but all these mechanisms share ceramic construction and a capability of providing travels of many centimeters with resolutions and formats that make them attractive for microscopy applications. For example, all eliminate the leadscrew assembly that typically juts off the side of many conventional microscopy stages. Some offer especially impressive power-off holding force, and others offer speeds exceeding 500 mm/sec. It is important to note that while these mechanisms are based on ceramics similar to those used to manufacture traditional layered piezo actuators, their construction and operating principles differ significantly from those of stack actuators.
High-precision motion over centimeters. In one example of this breed of piezomotors, a ceramic wafer is configured so that high-frequency excitation drives one or more resonant modes in the material, conferring a μm-scale oscillatory motion to a friction pusher tip affixed at a resonant antinode—a position on the structure that experiences maximum amplitude when resonated (Figure 6). The pusher tip, oscillating like a miniature pogo stick with nanoscale amplitudes and frequencies of hundreds of kHz, can then be preloaded against a guided workpiece, driving long-travel motion with continuous smooth motion and good dynamic behavior. The preloaded ceramic-on-ceramic drive means that the device clamps the moving part of the stage with nanoscale stabilities when at rest, with no heat generation. In addition, lubricant flow mechanisms, which cause long-term drift and settling behaviors in conventional screw-driven coarse-positioner mechanisms, are eliminated. This development also promises significant benefits in stitching applications, where high-resolution imaging is performed in small areas that are subsequently patched together in software. High stiffness and stability make ultrasonic piezomotor positioners a suitable base for high-speed flexure scanning stages.

Figure 6: Principle of an ultrasonic motor and application in a low profile XY microscope stage. Ultrasonic piezo motors are self-clamping, providing better in-position stability than traditional motors without any heat generation.
The drawback to these piezomotors has traditionally been a difficulty of control. Conventional controllers used for DC-servo motor mechanisms could not reap the benefits of the drive principle. Resonant piezomotors have a certain threshold before they move and a stimulus must be applied to the piezomotor before motion begins. This deadband behavior is great for in-position stability, but conventional motor controls techniques cannot deal with this behavior. The controller oscillator frequency needs to be in tune with the resonant frequency of the ceramic slab in the piezomotor, a fact that in the past required initial tuning and frequent adjustments during operation of a system. Both problems were solved with the latest generation of ultrasonic motor controllers developed by PI. An autotuning circuit constantly keeps the oscillator frequency in the optimum range, and a faster processor now automatically switches between gainsets, enabling the user to take full advantage of high-velocity constancy and the exceptional stability these friction motors provide at rest.
Piezo walking drives. By combining piezo elements acting in longitudinal and transverse directions, a walking actuator may be fabricated. These elements can be compressed against a longitudinal rod to confer motion. One familiar progenitor of this family of mechanisms was the Burleigh Inchworm, popular among microscopists in the 1990s but no longer commercially available. Recently developed mechanisms (Figure 7) offer extraordinary stiffness and holding force and are optimized for reliability in applications requiring long-term position hold while providing centimeters of travel with picometer-class resolution.
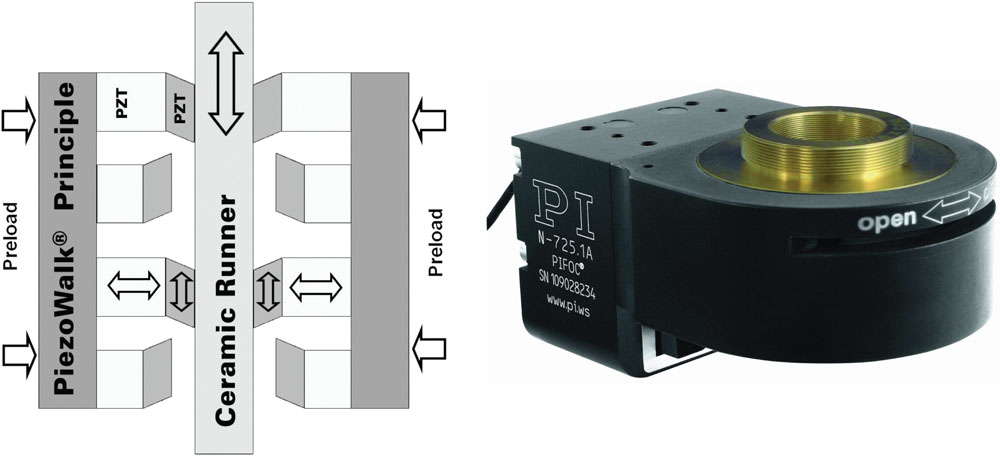
Figure 7: Piezowalk-motor driven microscope objective nano-positoner provides up to 4× longer long travel ranges than previous piezo lens positioners. This is particularly important for the penetration depths possible in 2-photon microscopy applications.
An even newer solution uses cost-effective bender-type piezo elements. Size and cost are substantially reduced, and power-off stiffness is still remarkable (10N holding force). This design also can provide centimeters of travel range and picometer-class resolution, ideal for applications like optic positioning in microlithography and sample positioning in various microscopies. A unique configuration integrates this type of piezo motor into a familiar “focusing collar” format, providing 2 mm of highly responsive objective positioning with nanoscale stability. A variety of thread inserts is offered for compatibility with popular objectives and microscopes from virtually all manufacturers. For both of these mechanisms motion occurs in two modes: a long-travel stepping mode and a fine-motion analog mode in which the actuator elements are sheared but not stepped, providing sub-nm positioning.
Three of these high-resolution motors were recently employed in a new light microscope that exceeds the diffraction limit by angle-dependent cathodoluminescence imaging spectroscopy, in which surface plasmons are stimulated, producing emission and yielding sub-diffraction-limit and 3D spatial resolution of materials and surfaces. The instrument was designed by researchers at King's College in London, the Institute of Photonic Sciences (ICFO) in Barcelona, and the Foundation for Fundamental Research on Matter in the Institute for Atomic and Molecular Physics in Amsterdam [6].
Discussion
The field of piezo motion control is unusually broadbased, both in terms of mechanical approach and in terms of applications fields. Both have expanded rapidly in recent years as manufacturers have kept pace with clever new imaging approaches by introducing new mechanical principles and design concepts that are aimed at eliminating the well-known travel limitations of piezo stack actuators while preserving their unmatched resolution, responsiveness, and throughput capabilities. Not only is piezo actuation increasingly suitable for applications formerly addressable only by magnetic motors, but significant benefits accrue in terms of travel-length, speed, resolution, dynamics, and reliability. These, in turn, are enablers for significant advances in existing and future applications in all types of microscopy.
Conclusion
Advances in actuator technology have provided light microscopes with better stage tracking performance, longer travels in Z-stack acquisition, more flexible coarse and fine positioning, and more precise motions over long travels. These improvements are particularly important in super-resolution microscopy applications.







