



1. Introduction
Pulmonary surfactant plays a crucial role in the healthy function of the lungs. By lowering the surface tension at the interface between air and the liquid that lines lung airways, surfactant helps to prevent unwanted collapse of small airways and alveoli during breathing (Milad & Morissette Reference Milad and Morissette2021). Surfactant deficiency is likely to contribute to the increased prevalence of airway obstructions in diseases such as asthma (Hohlfield Reference Hohlfield2002) and cystic fibrosis (Tiddens et al. Reference Tiddens, Donaldson, Rosenfeld and Paré2010). Mucus, the main component of the airway surface liquid, is a complex fluid exhibiting properties such as viscoelasticity, shear-thinning and a yield stress (Hill et al. Reference Hill, Button, Rubinstein and Boucher2022). In various obstructive diseases, and particularly in cystic fibrosis, the mucus typically has altered rheology, including a significantly increased yield stress compared with mucus in healthy lungs (Patarin et al. Reference Patarin, Ghiringhelli, Darsy, Obamba, Bochu and de Saint Vincent2020). This provides motivation for this study into the effect of insoluble surfactant on the instability of a viscoplastic liquid coating the interior of a cylindrical tube, which is a simple model for the flow of mucus that can lead to airway closure. Additional applications can be found in related interfacial flows of viscoplastic fluids from engineering and industry, where surfactants may also be present (Mitsoulis Reference Mitsoulis2007; Glasser et al. Reference Glasser, Cloutet, Hadziioannou and Kellay2019; Ahmadikhamsi et al. Reference Ahmadikhamsi, Golfier, Oltean, Lefèvre and Bahrani2020).
The instability of a liquid film coating the interior of a cylindrical tube has been widely studied in the case where the liquid is Newtonian. When the volume of fluid in the layer is small, annular liquid collars will form on the tube wall, and when the volume is large enough, liquid plugs form in the tube (Everett & Haynes Reference Everett and Haynes1972). Hammond (Reference Hammond1983) derived an evolution equation for the motion of a thin layer, and presented numerical and late-time asymptotic solutions showing annular collars forming and fluid slowly draining out of thin regions between them. This thin-film theory was then extended to describe the motion of thick films by Gauglitz & Radke (Reference Gauglitz and Radke1988), who deduced numerically that an approximate minimum thickness of  $12\,\%$ of the tube radius is required for plug formation to occur.
$12\,\%$ of the tube radius is required for plug formation to occur.
Otis et al. (Reference Otis, Johnson, Pedley and Kamm1990) were the first to extend the theory to include the effect of insoluble surfactant at the air–liquid interface. They found that growth of the instability and plug formation is delayed by the surfactant. Moreover, if the surfactant is strong, then Marangoni forces effectively immobilise the interface, increasing the time scale for the evolution of the layer by a factor of four compared with when there is no surfactant. This factor of four decrease in the growth rate had been previously identified by Carroll & Lucassen (Reference Carroll and Lucassen1974) in the related instability of a thin liquid layer coating the exterior of a cylindrical filament. Results from the thick-film model of Ogrosky (Reference Ogrosky2021) suggest that, whilst this factor is very close to four for layers with thicknesses close to the critical value for plug formation, it may be increased for thicker layers. Halpern & Grotberg (Reference Halpern and Grotberg1993) investigated the effect of surfactant on the evolution of a layer coating the interior of an elastic tube, and also found slowing of the dynamics and a delay to plug formation, except when the tube stiffness was very low, in which case the impact of including surfactant was minimal. They argued that this slowing implies an increase in the critical thickness required for plug formation, since simulations were run to a fixed finite time. This observation has relevance to mucus plug formation in airways, which typically form within the time scale of a single breath cycle. Experimental results have confirmed the decreased growth rates and increased times for plug formation to occur due to surfactant (Cassidy et al. Reference Cassidy, Halpern, Ressler and Grotberg1999). Computational fluid dynamics (CFD) simulations have also been conducted which, unlike quasi-one-dimensional models, can capture the post-coalescence phase of plug formation as well as the pre-coalescence phase (Romanò, Muradoglu & Grotberg Reference Romanò, Muradoglu and Grotberg2022). It was found, again, that introducing surfactant delayed plug formation, and also that it decreased the stress on the tube wall during plugging. The shear stress exerted on the tube wall is a physiologically important variable in airway closure models as it has been shown that epithelial cell damage can be caused by sufficiently large stresses being exerted on the airway wall (Huh et al. Reference Huh, Fujioka, Tung, Futai, Paine, Grotberg and Takayama2007).
There has been some attention on the effect of non-Newtonian liquid rheology on this flow in the case where there is no surfactant present. Halpern, Fujioka & Grotberg (Reference Halpern, Fujioka and Grotberg2010) studied the effect of viscoelasticity, showing that the time for a plug to form can be decreased by increasing the Weissenberg number if the layer is sufficiently thick. Romanò et al. (Reference Romanò, Muradoglu, Fujioka and Grotberg2021) also investigated a viscoelastic version of the flow, using CFD, and found that elastic effects can induce a significant peak in the shear stress on the tube wall in the post-coalescence phase of plug formation. Erken et al. (Reference Erken, Fazla, Muradoglu, Izbassarov, Romanò and Grotberg2023) took a similar approach but with an elastoviscoplastic model for the liquid layer, showing that elastic effects can also impact how the fluid yields, particularly around and immediately after plug formation.
Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) derived reduced-order models to study the effect of viscoplastic rheology on the dynamics of thin films and of thick films in the lead-up to plug formation. It was found that increasing the capillary Bingham number,  $B$ (a parameter proportional to the liquid yield stress), can suppress instability by rigidification of the layer, reduce deformation when there is instability and significantly increase the critical layer thickness required for plug formation to occur. A model describing the evolution of thicker layers was developed using a long-wave approximation, and a simplified evolution equation was deduced using thin-film theory. The viscoplastic long-wave theory used is closely related to the planar thin-film theory exposed by Balmforth & Craster (Reference Balmforth and Craster1999). The structure of the flow is qualitatively the same in long-wave and thin-film theories: where the shear stress exceeds the yield stress, the fluid is fully yielded and the flow is shear-dominated, but where the shear stress is less than the yield stress, the flow is plug-like with no shear flow at leading order. However, due to changes in the surrounding flow, some regions with plug-like flow must still deform. In these regions, the yield stress is exceeded by an asymptotically small amount (Balmforth & Craster Reference Balmforth and Craster1999) and the regions are referred to as ‘pseudo-plugs’ (Walton & Bittleston Reference Walton and Bittleston1991). Whilst the long-wave theory is similar to thin-film theory, it differs in a few crucial ways: the layer is not assumed to be thin relative to the tube radius, additional terms are retained in the evolution equations that more accurately capture the curvature of the geometry, and the exact expression for the curvature of the interface is used instead of the linearised version used in the thin-film theory. Thus, long-wave theory provides a composite approximation to the dynamics of a thick film, which is accurate where the layer is thin and also describes well the regions of the flow that are approximately capillary static. Equivalent, or very similar, approximations have been used previously to study this flow when the liquid layer is viscoelastic (Halpern et al. Reference Halpern, Fujioka and Grotberg2010) or Newtonian (Gauglitz & Radke Reference Gauglitz and Radke1988; Johnson et al. Reference Johnson, Kamm, Ho, Shapiro and Pedley1991; Camassa, Ogrosky & Olander Reference Camassa, Ogrosky and Olander2014, Reference Camassa, Ogrosky and Olander2017), including when insoluble surfactant is present (Otis et al. Reference Otis, Johnson, Pedley and Kamm1990, Reference Otis, Johnson, Pedley and Kamm1993; Ogrosky Reference Ogrosky2021).
$B$ (a parameter proportional to the liquid yield stress), can suppress instability by rigidification of the layer, reduce deformation when there is instability and significantly increase the critical layer thickness required for plug formation to occur. A model describing the evolution of thicker layers was developed using a long-wave approximation, and a simplified evolution equation was deduced using thin-film theory. The viscoplastic long-wave theory used is closely related to the planar thin-film theory exposed by Balmforth & Craster (Reference Balmforth and Craster1999). The structure of the flow is qualitatively the same in long-wave and thin-film theories: where the shear stress exceeds the yield stress, the fluid is fully yielded and the flow is shear-dominated, but where the shear stress is less than the yield stress, the flow is plug-like with no shear flow at leading order. However, due to changes in the surrounding flow, some regions with plug-like flow must still deform. In these regions, the yield stress is exceeded by an asymptotically small amount (Balmforth & Craster Reference Balmforth and Craster1999) and the regions are referred to as ‘pseudo-plugs’ (Walton & Bittleston Reference Walton and Bittleston1991). Whilst the long-wave theory is similar to thin-film theory, it differs in a few crucial ways: the layer is not assumed to be thin relative to the tube radius, additional terms are retained in the evolution equations that more accurately capture the curvature of the geometry, and the exact expression for the curvature of the interface is used instead of the linearised version used in the thin-film theory. Thus, long-wave theory provides a composite approximation to the dynamics of a thick film, which is accurate where the layer is thin and also describes well the regions of the flow that are approximately capillary static. Equivalent, or very similar, approximations have been used previously to study this flow when the liquid layer is viscoelastic (Halpern et al. Reference Halpern, Fujioka and Grotberg2010) or Newtonian (Gauglitz & Radke Reference Gauglitz and Radke1988; Johnson et al. Reference Johnson, Kamm, Ho, Shapiro and Pedley1991; Camassa, Ogrosky & Olander Reference Camassa, Ogrosky and Olander2014, Reference Camassa, Ogrosky and Olander2017), including when insoluble surfactant is present (Otis et al. Reference Otis, Johnson, Pedley and Kamm1990, Reference Otis, Johnson, Pedley and Kamm1993; Ogrosky Reference Ogrosky2021).
Viscoplastic thin-film theory has been used to describe various other interfacial flows where surface tension plays a key role. Balmforth, Ghadge & Myers (Reference Balmforth, Ghadge and Myers2007) studied the surface-tension-driven fingering instability in flow down an inclined plane, showing that the yield stress has a stabilising effect. Jalaal & Balmforth (Reference Jalaal and Balmforth2016) developed a model using thin-film theory for a propagating bubble through a tube filled with viscoplastic fluid, which they validated against CFD simulations. Increasing the Bingham number was found to increase the thickness of the film between the bubble and the tube wall. Thin-film theory compared well with simulations for low Bingham numbers but less well when the film thickness increased. Thin-film models for the axisymmetric spreading of droplets (Jalaal, Stoeber & Balmforth Reference Jalaal, Stoeber and Balmforth2021) and the spreading of long extruded filaments (van der Kolk, Tieman & Jalaal Reference van der Kolk, Tieman and Jalaal2023) have been developed and used to predict the distances reached by spreading fronts, which decrease as the capillary Bingham number is increased. Whilst these studies all addressed the effect of viscoplastic rheology on capillary phenomena, surfactant effects were not incorporated in any of the models. Craster & Matar (Reference Craster and Matar2000) used thin-film theory to model surfactant-driven flow in viscoplastic films, demonstrating that after Marangoni forces cause a spreading front to develop, the yield stress can rigidify the layer before it returns to a uniform height profile. This study did not, however, include the effects of capillary forces. To the authors’ knowledge, viscoplastic thin-film theory has not previously been used to study any flows where both capillary and Marangoni forces are present.
In this study, we develop a model for the evolution of a liquid film coating the interior of a tube, where the flow is driven by surface tension but is also influenced by Marangoni forces. Our aim is to quantify the effects of surfactant on the capillary instability and on the previously established effects of the liquid's yield stress (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). We will derive evolution equations for the layer height and surfactant concentration using long-wave theory, and subsequently deduce a simpler version of these equations that is valid in the thin-film limit. To focus attention on the interaction between Marangoni, capillary and yield-stress effects, other phenomena relevant to airway modelling are not included in the model. The Bingham constitutive model is used, which does not include rheological properties such as shear-thinning, viscoelasticity or thixotropy, but allows us to focus attention on yield-stress effects. Surface tension is assumed to vary linearly with surfactant concentration. For pulmonary surfactants, this relation is nonlinear (Schürch, Bachofen & Possmayer Reference Schürch, Bachofen and Possmayer2001), but the linear model captures key Marangoni effects while being amenable to detailed analysis. This choice is in keeping with previous models (Halpern & Grotberg Reference Halpern and Grotberg1993; Ogrosky Reference Ogrosky2021). Moreover, gravity is assumed negligible, the tube wall is assumed rigid and the air in the centre of the tube is assumed passive. Numerical solutions of both the long-wave and thin-film equations will be used to elucidate the new features of the dynamic evolution that arise due to the presence of surfactant, and also to systematically explore parameter space. We will exploit the relative simplicity of the thin-film equations to study the behaviour of the layer in a late-time limit and in the limit of large Marangoni number (when surfactant is strong). By computing and analysing solutions of the long-wave equations, we will quantify how surfactant alters the dynamics leading to plug formation and the critical thickness required for plugging to occur. In particular, we will show how surfactant acts synergistically with the yield stress to stabilise the liquid layer.
The paper will proceed as follows. In § 2, we derive evolution equations for the layer thickness and surfactant concentration, with the long-wave equations given in § 2.3 and the thin-film equations in § 2.4. Solution methods will then be briefly discussed in § 2.5. Results from the thin-film system will be presented in § 3. An example numerical simulation will be discussed in § 3.1, late-time asymptotic analysis of the thin-film equations will be presented in § 3.2, and the effect of varying the Marangoni number on the stability and evolution of the layer will be systematically addressed in § 3.3. Results for thick films from the long-wave theory will be given in § 4. An example numerical simulation will be examined in § 4.1, a discussion of the behaviour when the Marangoni number is large will be given in § 4.2 and the effect of surfactant on the critical thickness required for plug formation will be explored in § 4.3. Finally, in § 5, there will be a discussion of the significance of the results, particularly in relation to modelling airway closure in the lungs.
2. Model formulation
2.1. Governing equations and boundary conditions
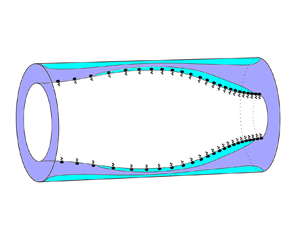
We consider a rigid circular cylindrical tube lined on its interior by a layer of viscoplastic liquid, with a gas in the centre of the tube and insoluble surfactant present at the gas–liquid interface (see figure 1). We assume the system is axisymmetric so it can be described using cylindrical coordinates  $(r^*,z^*)$. The tube has radius
$(r^*,z^*)$. The tube has radius  $a$ and the interface is located at
$a$ and the interface is located at  $r^* = R^*(z^*,t^*)$. The liquid layer has velocity
$r^* = R^*(z^*,t^*)$. The liquid layer has velocity  $\boldsymbol {u}^*(r^*,z^*,t^*) = u^*\boldsymbol {\hat {r}}+w^*\boldsymbol {\hat {z}}$ and pressure
$\boldsymbol {u}^*(r^*,z^*,t^*) = u^*\boldsymbol {\hat {r}}+w^*\boldsymbol {\hat {z}}$ and pressure  $p^*(r^*,z^*,t^*)$ relative to the gas pressure, which is assumed to be spatially uniform.
$p^*(r^*,z^*,t^*)$ relative to the gas pressure, which is assumed to be spatially uniform.

Figure 1. (a) Sketch of the model geometry. The air–liquid interface is located at  $r=R(z,t)$. Insoluble surfactant is present at the interface, with (non-dimensionalised) concentration
$r=R(z,t)$. Insoluble surfactant is present at the interface, with (non-dimensionalised) concentration  $\varGamma$. (b) Illustration of a possible axial velocity profile in the liquid layer,
$\varGamma$. (b) Illustration of a possible axial velocity profile in the liquid layer,  ${w}$. Fully yielded, shear-dominated regions (white) are shown adjacent to the interface (
${w}$. Fully yielded, shear-dominated regions (white) are shown adjacent to the interface ( $R\leq r\leq \varPsi _-$) and adjacent to the wall (
$R\leq r\leq \varPsi _-$) and adjacent to the wall ( $\varPsi _+\leq r\leq 1$), with a plug-like region (grey) in between (
$\varPsi _+\leq r\leq 1$), with a plug-like region (grey) in between ( $\varPsi _-< r<\varPsi _+$).
$\varPsi _-< r<\varPsi _+$).
The liquid is incompressible and we assume inertia is negligible, so conservation of mass and momentum imply
 \begin{equation} \boldsymbol{\nabla}^*\boldsymbol{\cdot}\boldsymbol{u}^*=\boldsymbol{0},\quad\boldsymbol{\nabla}^*\boldsymbol{\cdot}\boldsymbol{\tau}^* = \boldsymbol{\nabla}^* p^* \quad\text{for}\ R^*\leq r^* \leq a, \end{equation}
\begin{equation} \boldsymbol{\nabla}^*\boldsymbol{\cdot}\boldsymbol{u}^*=\boldsymbol{0},\quad\boldsymbol{\nabla}^*\boldsymbol{\cdot}\boldsymbol{\tau}^* = \boldsymbol{\nabla}^* p^* \quad\text{for}\ R^*\leq r^* \leq a, \end{equation}
where  $\boldsymbol {\tau }^*$ is the deviatoric stress tensor. The boundary conditions at the interface are the kinematic condition,
$\boldsymbol {\tau }^*$ is the deviatoric stress tensor. The boundary conditions at the interface are the kinematic condition,
 \begin{equation} \partial_t^*R^* + w^*\partial^*_zR^* = u^* \quad\mathrm{at}\ r^*=R^*, \end{equation}
\begin{equation} \partial_t^*R^* + w^*\partial^*_zR^* = u^* \quad\mathrm{at}\ r^*=R^*, \end{equation}and the stress condition,
 \begin{equation} -p^*\boldsymbol{n} + \boldsymbol{\tau}^*\boldsymbol{\cdot}\boldsymbol{n} = \sigma^*\kappa^*\boldsymbol{n} + \boldsymbol{\nabla}_s^*\sigma^*, \end{equation}
\begin{equation} -p^*\boldsymbol{n} + \boldsymbol{\tau}^*\boldsymbol{\cdot}\boldsymbol{n} = \sigma^*\kappa^*\boldsymbol{n} + \boldsymbol{\nabla}_s^*\sigma^*, \end{equation}
where  $\sigma ^*$ is the surface tension,
$\sigma ^*$ is the surface tension,  $\kappa ^*$ is the curvature of the interface,
$\kappa ^*$ is the curvature of the interface,  $\boldsymbol {n}$ is the unit normal to the interface directed away from the liquid layer and
$\boldsymbol {n}$ is the unit normal to the interface directed away from the liquid layer and  $\boldsymbol {\nabla }_s^*$ is the surface gradient operator. At the tube wall, there is no slip and no penetration,
$\boldsymbol {\nabla }_s^*$ is the surface gradient operator. At the tube wall, there is no slip and no penetration,
 \begin{equation} u^* = w^* = 0 \quad\mathrm{at}\ r^* = a. \end{equation}
\begin{equation} u^* = w^* = 0 \quad\mathrm{at}\ r^* = a. \end{equation}The liquid is assumed to be a Bingham fluid with constitutive relation,
 \begin{equation} \left. \begin{gathered} \tau^*_{ij} = \left(\eta+\frac{\tau_y}{\dot\gamma^*}\right){\dot\gamma}^*_{ij} \quad \mathrm{if}\ \tau^* \geq \tau_y,\\ {\dot\gamma}^*_{ij} = 0 \quad \mathrm{if}\ \tau^*<\tau_y, \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} \tau^*_{ij} = \left(\eta+\frac{\tau_y}{\dot\gamma^*}\right){\dot\gamma}^*_{ij} \quad \mathrm{if}\ \tau^* \geq \tau_y,\\ {\dot\gamma}^*_{ij} = 0 \quad \mathrm{if}\ \tau^*<\tau_y, \end{gathered} \right\} \end{equation}
where  $\eta$ is a viscosity,
$\eta$ is a viscosity,  $\tau _y$ is the yield stress,
$\tau _y$ is the yield stress,  $\boldsymbol {\dot \gamma }^* = \boldsymbol {\nabla }^*\boldsymbol {u}^* + \boldsymbol {\nabla }^*{\boldsymbol {u}^*}^\textrm {T}$ is the shear-rate tensor, and
$\boldsymbol {\dot \gamma }^* = \boldsymbol {\nabla }^*\boldsymbol {u}^* + \boldsymbol {\nabla }^*{\boldsymbol {u}^*}^\textrm {T}$ is the shear-rate tensor, and  $\tau ^*$ and
$\tau ^*$ and  $\dot \gamma ^*$ are the second invariants of
$\dot \gamma ^*$ are the second invariants of  $\boldsymbol {\tau }^*$ and
$\boldsymbol {\tau }^*$ and  $\boldsymbol {\dot \gamma }^*$, respectively. The second invariant of a tensor
$\boldsymbol {\dot \gamma }^*$, respectively. The second invariant of a tensor  $\boldsymbol{\mathsf{T}}$ is defined as
$\boldsymbol{\mathsf{T}}$ is defined as  $\boldsymbol{\mathsf{T}} = \sqrt {\frac {1}{2}\boldsymbol{\mathsf{T}}_{ij}\boldsymbol{\mathsf{T}}_{ij}}$.
$\boldsymbol{\mathsf{T}} = \sqrt {\frac {1}{2}\boldsymbol{\mathsf{T}}_{ij}\boldsymbol{\mathsf{T}}_{ij}}$.
We take the surface tension of the interface to be a linear function of the surfactant concentration,
 \begin{equation} \sigma^* = \sigma_0 + K(\varGamma_0-\varGamma^*), \end{equation}
\begin{equation} \sigma^* = \sigma_0 + K(\varGamma_0-\varGamma^*), \end{equation}
where  $\sigma _0$ and
$\sigma _0$ and  $\varGamma _0$ represent the constant values of the surface tension and surfactant concentration in an unperturbed state, and
$\varGamma _0$ represent the constant values of the surface tension and surfactant concentration in an unperturbed state, and  $K>0$ is a constant. We assume that the surfactant is insoluble so its motion is governed by the transport equation (see, e.g. Stone Reference Stone1990)
$K>0$ is a constant. We assume that the surfactant is insoluble so its motion is governed by the transport equation (see, e.g. Stone Reference Stone1990)
 \begin{equation} \partial^*_t\varGamma^* + \boldsymbol{\nabla}_s^*\boldsymbol{\cdot}(\varGamma^*\boldsymbol{u}^*_s) + \varGamma^*\kappa^*(\boldsymbol{u}^*\boldsymbol{\cdot}\boldsymbol{n})= 0, \end{equation}
\begin{equation} \partial^*_t\varGamma^* + \boldsymbol{\nabla}_s^*\boldsymbol{\cdot}(\varGamma^*\boldsymbol{u}^*_s) + \varGamma^*\kappa^*(\boldsymbol{u}^*\boldsymbol{\cdot}\boldsymbol{n})= 0, \end{equation}
where  $\boldsymbol {u}_s^*$ is the velocity along the interface. In (2.7), we have neglected diffusion of surfactant to focus on the limit of advection-dominated transport. In lung airways, although there is significant variation in measurements of the properties of surfactant and mucus, we typically expect surfactant diffusivity to be small and that advection will be the dominant transport mechanism (Craster & Matar Reference Craster and Matar2000; Lai et al. Reference Lai, Wang, Wirtz and Hanes2009; Chen et al. Reference Chen, Zhong, Luo, Deng, Hu and Song2019). At the lateral boundaries of the domain, we impose symmetry boundary conditions,
$\boldsymbol {u}_s^*$ is the velocity along the interface. In (2.7), we have neglected diffusion of surfactant to focus on the limit of advection-dominated transport. In lung airways, although there is significant variation in measurements of the properties of surfactant and mucus, we typically expect surfactant diffusivity to be small and that advection will be the dominant transport mechanism (Craster & Matar Reference Craster and Matar2000; Lai et al. Reference Lai, Wang, Wirtz and Hanes2009; Chen et al. Reference Chen, Zhong, Luo, Deng, Hu and Song2019). At the lateral boundaries of the domain, we impose symmetry boundary conditions,
 \begin{equation} \partial^*_zR^* = \tau^*_{rz} = w^*=(\boldsymbol{u}^*_s\boldsymbol{\cdot}\boldsymbol{\hat{z}})\varGamma = 0 \quad\mathrm{at}\ z^*=\{0,L^*\}, \end{equation}
\begin{equation} \partial^*_zR^* = \tau^*_{rz} = w^*=(\boldsymbol{u}^*_s\boldsymbol{\cdot}\boldsymbol{\hat{z}})\varGamma = 0 \quad\mathrm{at}\ z^*=\{0,L^*\}, \end{equation}which enforce that the first derivative of the layer height is zero and that there is no flux of fluid or surfactant across the side boundaries.
2.2. Non-dimensionalisation
To non-dimensionalise (2.1)–(2.7), we introduce the dimensionless quantities,
 \begin{align} \left. \begin{gathered} (r,z) = \left(\frac{r^*}{a},\frac{z^*}{a}\right), \quad{t} = \frac{\sigma_0}{a\eta}t^*, \quad \boldsymbol{\dot\gamma} = \frac{a\eta}{\sigma_0}\boldsymbol{\dot\gamma}^*, \quad ({u},{w}) = \frac{\eta}{\sigma_0}(u^*,w^*),\quad \varGamma = \frac{\varGamma^*}{\varGamma_0},\\ \boldsymbol{\tau} = \frac{a}{\sigma_0}\boldsymbol{\tau}^*,\quad R = \frac{R^*}{a}, \quad \sigma = \frac{\sigma^*}{\sigma_0}, \quad p = \frac{a}{\sigma_0}p^*, \quad\kappa = a\kappa^*,\quad L = \frac{L^*}{a}. \end{gathered} \right\} \end{align}
\begin{align} \left. \begin{gathered} (r,z) = \left(\frac{r^*}{a},\frac{z^*}{a}\right), \quad{t} = \frac{\sigma_0}{a\eta}t^*, \quad \boldsymbol{\dot\gamma} = \frac{a\eta}{\sigma_0}\boldsymbol{\dot\gamma}^*, \quad ({u},{w}) = \frac{\eta}{\sigma_0}(u^*,w^*),\quad \varGamma = \frac{\varGamma^*}{\varGamma_0},\\ \boldsymbol{\tau} = \frac{a}{\sigma_0}\boldsymbol{\tau}^*,\quad R = \frac{R^*}{a}, \quad \sigma = \frac{\sigma^*}{\sigma_0}, \quad p = \frac{a}{\sigma_0}p^*, \quad\kappa = a\kappa^*,\quad L = \frac{L^*}{a}. \end{gathered} \right\} \end{align}The mass and momentum conservation equations (2.1) become
 $$\begin{gather} 0 = \partial_z{w} + \frac{1}{r}\partial_r(r{u}), \end{gather}$$
$$\begin{gather} 0 = \partial_z{w} + \frac{1}{r}\partial_r(r{u}), \end{gather}$$ $$\begin{gather}\partial_r{p} = \frac{1}{r}\partial_r(r\tau_{rr})+\partial_z\tau_{rz}-\frac{\tau_{\theta\theta}}{r}, \end{gather}$$
$$\begin{gather}\partial_r{p} = \frac{1}{r}\partial_r(r\tau_{rr})+\partial_z\tau_{rz}-\frac{\tau_{\theta\theta}}{r}, \end{gather}$$ $$\begin{gather}\partial_z{p} = \frac{1}{r}\partial_r(r\tau_{rz}) + \partial_z\tau_{zz}. \end{gather}$$
$$\begin{gather}\partial_z{p} = \frac{1}{r}\partial_r(r\tau_{rz}) + \partial_z\tau_{zz}. \end{gather}$$The wall boundary conditions (2.4) are
 \begin{equation} {u} = {w} = 0 \quad \text{on} \ r = 1, \end{equation}
\begin{equation} {u} = {w} = 0 \quad \text{on} \ r = 1, \end{equation}the kinematic boundary condition (2.2) is
 \begin{equation} \partial_{t}R+{w}\partial_zR = {u},\quad\mbox{on}\ r=R, \end{equation}
\begin{equation} \partial_{t}R+{w}\partial_zR = {u},\quad\mbox{on}\ r=R, \end{equation}and the stress boundary condition (2.3) is
 \begin{equation} -{p}n_i + \tau_{ij}n_j = \sigma\kappa n_i + (\delta_{ij}-n_in_j)\partial_j\sigma, \quad\mbox{on}\ r=R, \end{equation}
\begin{equation} -{p}n_i + \tau_{ij}n_j = \sigma\kappa n_i + (\delta_{ij}-n_in_j)\partial_j\sigma, \quad\mbox{on}\ r=R, \end{equation}where the curvature of the interface is
 \begin{equation} \kappa = \frac{1}{\sqrt{1+(\partial_zR)^2}}\left[\frac{1}{R}-\frac{\partial_{zz}R}{1+(\partial_zR)^2}\right]. \end{equation}
\begin{equation} \kappa = \frac{1}{\sqrt{1+(\partial_zR)^2}}\left[\frac{1}{R}-\frac{\partial_{zz}R}{1+(\partial_zR)^2}\right]. \end{equation}The constitutive relation (2.5) is
 \begin{equation} \left. \begin{gathered} \tau_{ij} = \left(1+\frac{\operatorname{\mathcal{B}}}{\dot\gamma}\right){\dot\gamma}_{ij}, \quad \mathrm{if} \ \tau \geq \operatorname{\mathcal{B}},\\ {\dot\gamma}_{ij} = 0 \quad \mathrm{if}\ \tau<\operatorname{\mathcal{B}}, \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} \tau_{ij} = \left(1+\frac{\operatorname{\mathcal{B}}}{\dot\gamma}\right){\dot\gamma}_{ij}, \quad \mathrm{if} \ \tau \geq \operatorname{\mathcal{B}},\\ {\dot\gamma}_{ij} = 0 \quad \mathrm{if}\ \tau<\operatorname{\mathcal{B}}, \end{gathered} \right\} \end{equation}where
 \begin{equation} {\operatorname{\mathcal{B}}}=\frac{a\tau_y}{\sigma_0} \end{equation}
\begin{equation} {\operatorname{\mathcal{B}}}=\frac{a\tau_y}{\sigma_0} \end{equation}is a capillary Bingham (or plastocapillarity) number (Jalaal et al. Reference Jalaal, Stoeber and Balmforth2021; van der Kolk et al. Reference van der Kolk, Tieman and Jalaal2023). The equation of state (2.6) becomes
 \begin{equation} \sigma(\varGamma) = 1 + {\operatorname{\mathcal{M}}}(1-\varGamma), \end{equation}
\begin{equation} \sigma(\varGamma) = 1 + {\operatorname{\mathcal{M}}}(1-\varGamma), \end{equation}where
 \begin{equation} \operatorname{\mathcal{M}} = \frac{K\varGamma_0}{\sigma_0} \end{equation}
\begin{equation} \operatorname{\mathcal{M}} = \frac{K\varGamma_0}{\sigma_0} \end{equation}is a Marangoni number. The transport equation (2.7) can be expressed in conservative form (Halpern & Frenkel Reference Halpern and Frenkel2003) as
 \begin{equation} \partial_{t}[R\varGamma\sqrt{1+(\partial_zR)^2}] + \partial_z[{w}_sR\varGamma\sqrt{ 1+(\partial_zR)^2}] = 0, \end{equation}
\begin{equation} \partial_{t}[R\varGamma\sqrt{1+(\partial_zR)^2}] + \partial_z[{w}_sR\varGamma\sqrt{ 1+(\partial_zR)^2}] = 0, \end{equation}
where  $w_s$ is the axial component of the surface velocity. We now examine simplified versions of (2.10)–(2.21), first in a long-wave limit, appropriate for thicker films, and then in a more restrictive thin-film limit.
$w_s$ is the axial component of the surface velocity. We now examine simplified versions of (2.10)–(2.21), first in a long-wave limit, appropriate for thicker films, and then in a more restrictive thin-film limit.
2.3. Long-wave theory
We consider the system (2.10)–(2.21) in a long-wave limit by defining a characteristic axial length scale,  $\mathcal {L}=a/\delta$, where
$\mathcal {L}=a/\delta$, where  $\delta \ll 1$. We define stretched variables,
$\delta \ll 1$. We define stretched variables,
 \begin{equation} \bar{z}=\delta z,\quad \bar{u}=\frac{u}{\delta^2},\quad \bar{w}=\frac{w}{\delta},\quad \bar{t}=\delta^2 {t},\quad \bar{\boldsymbol{\tau}} = \frac{\boldsymbol{\tau}}{\delta},\quad \bar{L} = \delta L, \end{equation}
\begin{equation} \bar{z}=\delta z,\quad \bar{u}=\frac{u}{\delta^2},\quad \bar{w}=\frac{w}{\delta},\quad \bar{t}=\delta^2 {t},\quad \bar{\boldsymbol{\tau}} = \frac{\boldsymbol{\tau}}{\delta},\quad \bar{L} = \delta L, \end{equation}
where the choice of scalings for  $z$ and
$z$ and  $L$ arise from the long-wave approximation, the scaling for
$L$ arise from the long-wave approximation, the scaling for  $\boldsymbol {\tau }$ is then chosen so that the radial gradient of shear stress balances the axial pressure gradient in (2.12), the scaling for
$\boldsymbol {\tau }$ is then chosen so that the radial gradient of shear stress balances the axial pressure gradient in (2.12), the scaling for  $w$ is chosen so that the shear stress balances with the corresponding term in the strain-rate tensor in (2.17),
$w$ is chosen so that the shear stress balances with the corresponding term in the strain-rate tensor in (2.17),  $u$ is scaled such that the mass conservation equation (2.10) balances and, finally, the scaling for
$u$ is scaled such that the mass conservation equation (2.10) balances and, finally, the scaling for  $t$ allows all terms in the kinematic boundary condition (2.14) to balance. (The scalings (2.22) correct those printed in (2.11) of Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) but the equations derived there are still correct and consistent with what we derive here.) We then truncate the governing equations (2.10)–(2.21) at leading order in
$t$ allows all terms in the kinematic boundary condition (2.14) to balance. (The scalings (2.22) correct those printed in (2.11) of Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) but the equations derived there are still correct and consistent with what we derive here.) We then truncate the governing equations (2.10)–(2.21) at leading order in  $\delta$, with the exception of (2.16) where we retain the exact curvature, which is a commonly used device to improve accuracy in near-static regions of the flow (Gauglitz & Radke Reference Gauglitz and Radke1988; Halpern & Grotberg Reference Halpern and Grotberg1992, Reference Halpern and Grotberg1993; Halpern et al. Reference Halpern, Fujioka and Grotberg2010; Ogrosky Reference Ogrosky2021; Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). The leading-order governing equations and boundary conditions are given in Appendix A, where we also detail the derivation of the long-wave evolution equations, which are presented in the remainder of this section. As has been done previously in similar problems (Camassa et al. Reference Camassa, Forest, Lee, Ogrosky and Olander2012; Camassa & Ogrosky Reference Camassa and Ogrosky2015; Ogrosky Reference Ogrosky2021; Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), we will present the long-wave equations here in terms of the unscaled variables defined in (2.9) instead of the scaled variables (2.22), but the equations still represent the leading-order theory in the limit
$\delta$, with the exception of (2.16) where we retain the exact curvature, which is a commonly used device to improve accuracy in near-static regions of the flow (Gauglitz & Radke Reference Gauglitz and Radke1988; Halpern & Grotberg Reference Halpern and Grotberg1992, Reference Halpern and Grotberg1993; Halpern et al. Reference Halpern, Fujioka and Grotberg2010; Ogrosky Reference Ogrosky2021; Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). The leading-order governing equations and boundary conditions are given in Appendix A, where we also detail the derivation of the long-wave evolution equations, which are presented in the remainder of this section. As has been done previously in similar problems (Camassa et al. Reference Camassa, Forest, Lee, Ogrosky and Olander2012; Camassa & Ogrosky Reference Camassa and Ogrosky2015; Ogrosky Reference Ogrosky2021; Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), we will present the long-wave equations here in terms of the unscaled variables defined in (2.9) instead of the scaled variables (2.22), but the equations still represent the leading-order theory in the limit  $\delta \ll 1$.
$\delta \ll 1$.
To understand the structure of the evolution equations, it is important to first understand the structure of the flow and the ways in which the layer can yield. Where the magnitude of the shear stress is larger than the yield stress,  $|\tau _{rz}|>\operatorname {\mathcal {B}}$ for some
$|\tau _{rz}|>\operatorname {\mathcal {B}}$ for some  $R(z,t)< r<1$, the fluid is fully yielded and the flow is shear-dominated. Where
$R(z,t)< r<1$, the fluid is fully yielded and the flow is shear-dominated. Where  $|\tau _{rz}|\leq \operatorname {\mathcal {B}}$ for some
$|\tau _{rz}|\leq \operatorname {\mathcal {B}}$ for some  $R(z,t)< r<1$, the flow is plug-like and the leading-order axial velocity is independent of
$R(z,t)< r<1$, the flow is plug-like and the leading-order axial velocity is independent of  $r$, i.e.
$r$, i.e.  ${w}={w}_p(z,t)$. If
${w}={w}_p(z,t)$. If  ${w}_p$ is also independent of
${w}_p$ is also independent of  $z$ in a plug-like region, then it is a rigid plug. If not, then that plug-like region is deforming axially so it must be yielded. In those yielded plug-like regions, the normal stresses become leading-order in
$z$ in a plug-like region, then it is a rigid plug. If not, then that plug-like region is deforming axially so it must be yielded. In those yielded plug-like regions, the normal stresses become leading-order in  $\delta$ and combine with the shear stress such that the yield condition is just met; such a region is referred to as a ‘pseudo-plug’ (Walton & Bittleston Reference Walton and Bittleston1991). This general structure is the same as in viscoplastic thin-film flows, as detailed by (Balmforth & Craster Reference Balmforth and Craster1999). For the remainder of this section, subscripts will be used to denote derivatives.
$\delta$ and combine with the shear stress such that the yield condition is just met; such a region is referred to as a ‘pseudo-plug’ (Walton & Bittleston Reference Walton and Bittleston1991). This general structure is the same as in viscoplastic thin-film flows, as detailed by (Balmforth & Craster Reference Balmforth and Craster1999). For the remainder of this section, subscripts will be used to denote derivatives.
Where the fully yielded regions, pseudo-plugs and rigid plugs occur in the liquid film depends on the competition between surface and bulk forcing, via  $\operatorname {\mathcal {M}}\varGamma _z$ and
$\operatorname {\mathcal {M}}\varGamma _z$ and  $p_z$, and their sizes relative to
$p_z$, and their sizes relative to  $\operatorname {\mathcal {B}}$. In Appendix A, we show that, in the long-wave limit, the capillary pressure is given by
$\operatorname {\mathcal {B}}$. In Appendix A, we show that, in the long-wave limit, the capillary pressure is given by
 \begin{equation} p = - \kappa\left[1+\operatorname{\mathcal{M}}(1-\varGamma)\right], \end{equation}
\begin{equation} p = - \kappa\left[1+\operatorname{\mathcal{M}}(1-\varGamma)\right], \end{equation}
where the curvature of the interface,  $\kappa$, is defined in (2.16), and that the shear stress is given by
$\kappa$, is defined in (2.16), and that the shear stress is given by
 \begin{equation} \tau_{rz} = \frac{p_z}{2}\left(r - \frac{R^2}{r}\right) + \frac{R}{r}\mathcal{M}\varGamma_z. \end{equation}
\begin{equation} \tau_{rz} = \frac{p_z}{2}\left(r - \frac{R^2}{r}\right) + \frac{R}{r}\mathcal{M}\varGamma_z. \end{equation}
By noting how  $\tau _{rz}$ depends on
$\tau _{rz}$ depends on  $r$ in (2.24), it can be deduced that there are five qualitatively different types of yielding that can occur in the layer, corresponding to the five possible combinations of fully yielded regions, rigid plugs and pseudo-plugs that can exist in
$r$ in (2.24), it can be deduced that there are five qualitatively different types of yielding that can occur in the layer, corresponding to the five possible combinations of fully yielded regions, rigid plugs and pseudo-plugs that can exist in  $R\leq r\leq 1$. We define two internal surfaces,
$R\leq r\leq 1$. We define two internal surfaces,  $r=\varPsi _-(z,t)$ and
$r=\varPsi _-(z,t)$ and  $r=\varPsi _+(z,t)$, which separate fully yielded and plug-like regions. The fully yielded regions (where
$r=\varPsi _+(z,t)$, which separate fully yielded and plug-like regions. The fully yielded regions (where  $|\tau _{rz}|>\mathcal {B}$) occupy
$|\tau _{rz}|>\mathcal {B}$) occupy  $R\leq r\leq \varPsi _-$ and
$R\leq r\leq \varPsi _-$ and  $\varPsi _+\leq r\leq 1$, and the plug-like region (where
$\varPsi _+\leq r\leq 1$, and the plug-like region (where  $|\tau _{rz}|\leq \mathcal {B}$) occupies
$|\tau _{rz}|\leq \mathcal {B}$) occupies  $\varPsi _-\leq r\leq \varPsi _+$. Note that each of these three regions may not always exist, in which case the width of the region will be zero. The five possible types of yielding are as follows and are illustrated in figure 2(a).
$\varPsi _-\leq r\leq \varPsi _+$. Note that each of these three regions may not always exist, in which case the width of the region will be zero. The five possible types of yielding are as follows and are illustrated in figure 2(a).
(I) Internal pseudo-plug (
 $R<\varPsi _-<\varPsi _+<1$). Here, fully yielded regions adjacent to the wall and the interface are separated by a pseudo-plug.
$R<\varPsi _-<\varPsi _+<1$). Here, fully yielded regions adjacent to the wall and the interface are separated by a pseudo-plug.(II) Surface pseudo-plug (
$\varPsi _-= R<\varPsi _+<1$). Here, the pseudo-plug extends to the interface and the only fully yielded region is adjacent to the wall.(III) Fully yielded (
$\varPsi _-=\varPsi _+= R$ or $1=\varPsi _-=\varPsi _+$). In this case, there is no plug-like region and the whole layer is fully yielded.(IV) Near-wall plug (
$R<\varPsi _-<1=\varPsi _+$). Here, there is a rigid plug adjacent to the wall and the only fully yielded region is adjacent to the interface.(V) Fully rigid (
$\varPsi _-= R$ and $\varPsi _+=1$). Neither yielded region exists and the whole layer is a rigid plug.








Figure 2. (a) The fives types of yielding that can occur in the layer. Plug-like regions are shown in grey and fully yielded regions in white. Typical axial velocity profiles are also sketched. Below are maps of parameter space showing where these yielding types occur in (b) the long-wave system and (c) the thin-film system. When plotting the map in panel (b), we treat  $R$ as a fixed parameter to focus on variation with
$R$ as a fixed parameter to focus on variation with  $p_z$ and
$p_z$ and  $\operatorname {\mathcal {M}}\varGamma _z$. In panel (b), as in § 2.3, the parameter map is plotted in terms of the unscaled variables (2.9). In panel (c), the map is plotted in terms of the scaled thin-film variables introduced in (2.37). Along the dashed line in panel (c), the surface velocity is exactly zero,
$\operatorname {\mathcal {M}}\varGamma _z$. In panel (b), as in § 2.3, the parameter map is plotted in terms of the unscaled variables (2.9). In panel (c), the map is plotted in terms of the scaled thin-film variables introduced in (2.37). Along the dashed line in panel (c), the surface velocity is exactly zero,  $\tilde {w}_s=0$.
$\tilde {w}_s=0$.
Hewitt & Balmforth (Reference Hewitt and Balmforth2012) identified these same five yielding types in the flow of a thin film between two moving solid surfaces. In that problem, there are simple criteria to determine which yielding type occurs based on the size of the shear stress at the two solid boundaries. Here, the additional complexity of the long-wave theory compared with the thin-film theory means there are not such simple criteria. Instead, we derive the following expressions for  $\varPsi _\pm$, from which the type of yielding can be deduced. We find
$\varPsi _\pm$, from which the type of yielding can be deduced. We find
 \begin{equation} \varPsi_\pm = \max[R,\min\left(1,\psi_\pm\right)], \end{equation}
\begin{equation} \varPsi_\pm = \max[R,\min\left(1,\psi_\pm\right)], \end{equation}
where, if  $p_z\neq 0$, we have
$p_z\neq 0$, we have
 \begin{equation} \psi_{{\pm}} =
\left\{\begin{array}{@{}ll}
\pm\dfrac{\operatorname{\mathcal{B}}}{|p_z|}+\sqrt{\left(\dfrac{\operatorname{\mathcal{B}}}{p_z}\right)^2+R^2-\dfrac{2R\operatorname{\mathcal{M}}\varGamma_z}{p_z}}
& \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}<1,\\
\dfrac{\operatorname{\mathcal{B}}}{|p_z|}\pm\sqrt{\left(\dfrac{\operatorname{\mathcal{B}}}{p_z}\right)^2+R^2-\dfrac{2R\operatorname{\mathcal{M}}\varGamma_z}{p_z}}
& \mbox{if}\
1+\dfrac{\operatorname{\mathcal{B}}^2}{R^2p_z^2}\geq\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}\geq1,\\
R & \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}>1+\dfrac{\operatorname{\mathcal{B}}^2}{R^2p_z^2},
\end{array} \right. \end{equation}
\begin{equation} \psi_{{\pm}} =
\left\{\begin{array}{@{}ll}
\pm\dfrac{\operatorname{\mathcal{B}}}{|p_z|}+\sqrt{\left(\dfrac{\operatorname{\mathcal{B}}}{p_z}\right)^2+R^2-\dfrac{2R\operatorname{\mathcal{M}}\varGamma_z}{p_z}}
& \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}<1,\\
\dfrac{\operatorname{\mathcal{B}}}{|p_z|}\pm\sqrt{\left(\dfrac{\operatorname{\mathcal{B}}}{p_z}\right)^2+R^2-\dfrac{2R\operatorname{\mathcal{M}}\varGamma_z}{p_z}}
& \mbox{if}\
1+\dfrac{\operatorname{\mathcal{B}}^2}{R^2p_z^2}\geq\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}\geq1,\\
R & \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}>1+\dfrac{\operatorname{\mathcal{B}}^2}{R^2p_z^2},
\end{array} \right. \end{equation}
and if  $p_z=0$, then
$p_z=0$, then  $\psi _-=R\operatorname {\mathcal {M}}|\varGamma _z|/\operatorname {\mathcal {B}}$ and
$\psi _-=R\operatorname {\mathcal {M}}|\varGamma _z|/\operatorname {\mathcal {B}}$ and  $\psi _+=1$. Note that these definitions mean that
$\psi _+=1$. Note that these definitions mean that  $\varPsi _\pm$ are continuous everywhere, including at
$\varPsi _\pm$ are continuous everywhere, including at  $p_z=0$.
$p_z=0$.
Given values of  $R$,
$R$,  $\operatorname {\mathcal {B}}$,
$\operatorname {\mathcal {B}}$,  $p_z$ and
$p_z$ and  $\operatorname {\mathcal {M}}\varGamma _z$, the type of yielding can then be deduced from (2.26). A more intuitive illustration of when the yielding types I–V occur is given by figure 2(b). It shows how the yielding type depends on the size of the capillary stress relative to the yield stress, via
$\operatorname {\mathcal {M}}\varGamma _z$, the type of yielding can then be deduced from (2.26). A more intuitive illustration of when the yielding types I–V occur is given by figure 2(b). It shows how the yielding type depends on the size of the capillary stress relative to the yield stress, via  $p_z/\operatorname {\mathcal {B}}$, and on the size of the Marangoni stress relative to the yield stress, via
$p_z/\operatorname {\mathcal {B}}$, and on the size of the Marangoni stress relative to the yield stress, via  $\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$. We plot figure 2(b) assuming
$\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$. We plot figure 2(b) assuming  $R$ is fixed, even though, in general, it will vary with
$R$ is fixed, even though, in general, it will vary with  $z$. We now briefly survey
$z$. We now briefly survey  $(p_z/\operatorname {\mathcal {B}},\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}})$-space. Starting in the upper left region of figure 2(b), where capillary and Marangoni stresses are both large but with opposite signs, there is yielding of type I. Suppose
$(p_z/\operatorname {\mathcal {B}},\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}})$-space. Starting in the upper left region of figure 2(b), where capillary and Marangoni stresses are both large but with opposite signs, there is yielding of type I. Suppose  $\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$ is then decreased, so that we cross the line
$\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$ is then decreased, so that we cross the line  $\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}=1$. Then the shear stress at the interface has dropped below
$\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}=1$. Then the shear stress at the interface has dropped below  $\operatorname {\mathcal {B}}$ so there can no longer be a fully yielded region at the interface, and the layer then exhibits yielding of type II. Decreasing
$\operatorname {\mathcal {B}}$ so there can no longer be a fully yielded region at the interface, and the layer then exhibits yielding of type II. Decreasing  $\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$ further so that
$\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$ further so that  $\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}<-1$, the Marangoni stress at the interface again exceeds the yield stress so there must be yielding at the interface, but it now acts in the same direction as the capillary stress. The layer then exhibits yielding of type III. Now increasing
$\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}<-1$, the Marangoni stress at the interface again exceeds the yield stress so there must be yielding at the interface, but it now acts in the same direction as the capillary stress. The layer then exhibits yielding of type III. Now increasing  $p_z/\operatorname {\mathcal {B}}$, we remain in yielding type III until we reach the line
$p_z/\operatorname {\mathcal {B}}$, we remain in yielding type III until we reach the line  $(1-R^2)p_z+2R\operatorname {\mathcal {M}}\varGamma _z=-2\operatorname {\mathcal {B}}$. After crossing this line, the capillary stress is no longer strong enough to yield the fluid adjacent to the wall, so a rigid plug develops there and we have yielding of type IV. Increasing
$(1-R^2)p_z+2R\operatorname {\mathcal {M}}\varGamma _z=-2\operatorname {\mathcal {B}}$. After crossing this line, the capillary stress is no longer strong enough to yield the fluid adjacent to the wall, so a rigid plug develops there and we have yielding of type IV. Increasing  $p_z/\operatorname {\mathcal {B}}$ yet further, so that we cross the line
$p_z/\operatorname {\mathcal {B}}$ yet further, so that we cross the line  $(1-R^2)p_z+2R\operatorname {\mathcal {M}}\varGamma _z=2\operatorname {\mathcal {B}}$, now
$(1-R^2)p_z+2R\operatorname {\mathcal {M}}\varGamma _z=2\operatorname {\mathcal {B}}$, now  $p_z/\operatorname {\mathcal {B}}$ is large enough that the lower fully yielded region appears again so we have returned to yielding of type I, but with the flow in the opposite direction to when we started. Symmetry means that if we proceed in the same fashion around the other half of the plane, the yielding transitions will be the same as just described. There are two regions in figure 2 that we have not yet discussed. When
$p_z/\operatorname {\mathcal {B}}$ is large enough that the lower fully yielded region appears again so we have returned to yielding of type I, but with the flow in the opposite direction to when we started. Symmetry means that if we proceed in the same fashion around the other half of the plane, the yielding transitions will be the same as just described. There are two regions in figure 2 that we have not yet discussed. When  $p_z/\operatorname {\mathcal {B}}$ and
$p_z/\operatorname {\mathcal {B}}$ and  $\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$ are both small, there is no yielding, so there is a region with yielding of type V around the origin. Finally, yielding of type I can also be observed in two small regions near
$\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}}$ are both small, there is no yielding, so there is a region with yielding of type V around the origin. Finally, yielding of type I can also be observed in two small regions near  $(p_z/\operatorname {\mathcal {B}},\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}})=(\pm 2/(1-R),\pm 1)$. The existence of these relies on the shear stress in the long-wave theory being nonlinear, so they do not exist in the simpler thin-film limit (figure 2c).
$(p_z/\operatorname {\mathcal {B}},\operatorname {\mathcal {M}}\varGamma _z/\operatorname {\mathcal {B}})=(\pm 2/(1-R),\pm 1)$. The existence of these relies on the shear stress in the long-wave theory being nonlinear, so they do not exist in the simpler thin-film limit (figure 2c).
Given the expressions for  $\varPsi _\pm$ in (2.25) and (2.26), we can now present the long-wave evolution equations, which are derived in Appendix A. The evolution equation for the interface position,
$\varPsi _\pm$ in (2.25) and (2.26), we can now present the long-wave evolution equations, which are derived in Appendix A. The evolution equation for the interface position,  $R$, is
$R$, is
 \begin{equation} R_t=\frac{1}{R}Q_z, \end{equation}
\begin{equation} R_t=\frac{1}{R}Q_z, \end{equation}where the axial volume flux is given by
 \begin{equation} Q =
\left\{\begin{array}{@{}ll}
-\dfrac{p_z}{16}F_1-\dfrac{1}{4}R\operatorname{\mathcal{M}}\varGamma_zF_2-\dfrac{\operatorname{\mathcal{B}}}{6}\operatorname{sgn}(p_z)(F_3+F_4)
& \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}<1,\\
-\dfrac{p_z}{16}F_1-\dfrac{1}{4}R\operatorname{\mathcal{M}}\varGamma_zF_2-\dfrac{\operatorname{\mathcal{B}}}{6}\operatorname{sgn}(p_z)(F_3-F_4)
& \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}\geq 1,\\ -\dfrac{1}{4}R\operatorname{\mathcal{M}}\varGamma_zF_2
+
\dfrac{\operatorname{\mathcal{B}}}{6}\operatorname{sgn}(\varGamma_z)F_4
& \mbox{if}\ p_z=0, \end{array} \right.
\end{equation}
\begin{equation} Q =
\left\{\begin{array}{@{}ll}
-\dfrac{p_z}{16}F_1-\dfrac{1}{4}R\operatorname{\mathcal{M}}\varGamma_zF_2-\dfrac{\operatorname{\mathcal{B}}}{6}\operatorname{sgn}(p_z)(F_3+F_4)
& \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}<1,\\
-\dfrac{p_z}{16}F_1-\dfrac{1}{4}R\operatorname{\mathcal{M}}\varGamma_zF_2-\dfrac{\operatorname{\mathcal{B}}}{6}\operatorname{sgn}(p_z)(F_3-F_4)
& \mbox{if}\
\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}\geq 1,\\ -\dfrac{1}{4}R\operatorname{\mathcal{M}}\varGamma_zF_2
+
\dfrac{\operatorname{\mathcal{B}}}{6}\operatorname{sgn}(\varGamma_z)F_4
& \mbox{if}\ p_z=0, \end{array} \right.
\end{equation}
with
 $$\begin{gather} F_1 = \varPsi_-^4-4R^2\varPsi_-^2+R^4\left[3-4\log\left(\frac{R\varPsi_+}{\varPsi_-}\right)\right] -\varPsi_+^4 + 4R^2\varPsi_+^2-4R^2+1, \end{gather}$$
$$\begin{gather} F_1 = \varPsi_-^4-4R^2\varPsi_-^2+R^4\left[3-4\log\left(\frac{R\varPsi_+}{\varPsi_-}\right)\right] -\varPsi_+^4 + 4R^2\varPsi_+^2-4R^2+1, \end{gather}$$ $$\begin{gather}F_2 = \varPsi_-^2-R^2-\varPsi_+^2+1+2R^2\log\left(\frac{R\varPsi_+}{\varPsi_-}\right), \end{gather}$$
$$\begin{gather}F_2 = \varPsi_-^2-R^2-\varPsi_+^2+1+2R^2\log\left(\frac{R\varPsi_+}{\varPsi_-}\right), \end{gather}$$ $$\begin{gather}F_3 = (\varPsi_+ - 1)( - 3R^2+1+\varPsi_+ + \varPsi_+^2),\quad F_4=\varPsi_-^3-3R^2\varPsi_- + 2R^3. \end{gather}$$
$$\begin{gather}F_3 = (\varPsi_+ - 1)( - 3R^2+1+\varPsi_+ + \varPsi_+^2),\quad F_4=\varPsi_-^3-3R^2\varPsi_- + 2R^3. \end{gather}$$
If  $\operatorname {\mathcal {M}}=0$, or equivalently if there is no surfactant,
$\operatorname {\mathcal {M}}=0$, or equivalently if there is no surfactant,  $\varGamma =0$, then
$\varGamma =0$, then  $\varPsi _-=R$ and (2.27)–(2.29) reduce to the evolution equation for the surfactant-free problem (correcting a typographical sign error in the expression for
$\varPsi _-=R$ and (2.27)–(2.29) reduce to the evolution equation for the surfactant-free problem (correcting a typographical sign error in the expression for  $Q$ given in (2.16) of Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). The surfactant transport equation is
$Q$ given in (2.16) of Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). The surfactant transport equation is
 \begin{equation} (R\varGamma)_t + (w_sR\varGamma)_z=0,\end{equation}
\begin{equation} (R\varGamma)_t + (w_sR\varGamma)_z=0,\end{equation}where the surface velocity is
 \begin{equation} w_s = \left\{\begin{array}{@{}ll} \dfrac{1}{4}p_zG_1+R\operatorname{\mathcal{M}}\varGamma_zG_2+\operatorname{\mathcal{B}}\operatorname{sgn}(p_z)(G_3+G_4) & \mbox{if}\ \dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}<1,\\ \dfrac{1}{4}p_zG_1+R\operatorname{\mathcal{M}}\varGamma_zG_2+\operatorname{\mathcal{B}}\operatorname{sgn}(p_z)(G_3-G_4) & \mbox{if}\\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}\geq1,\\ R\operatorname{\mathcal{M}}\varGamma_zG_2 - \operatorname{\mathcal{B}}\operatorname{sgn}(\varGamma_z)G_4 & \mbox{if}\ p_z=0, \end{array}\right. \end{equation}
\begin{equation} w_s = \left\{\begin{array}{@{}ll} \dfrac{1}{4}p_zG_1+R\operatorname{\mathcal{M}}\varGamma_zG_2+\operatorname{\mathcal{B}}\operatorname{sgn}(p_z)(G_3+G_4) & \mbox{if}\ \dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}<1,\\ \dfrac{1}{4}p_zG_1+R\operatorname{\mathcal{M}}\varGamma_zG_2+\operatorname{\mathcal{B}}\operatorname{sgn}(p_z)(G_3-G_4) & \mbox{if}\\dfrac{2\operatorname{\mathcal{M}}\varGamma_z}{Rp_z}\geq1,\\ R\operatorname{\mathcal{M}}\varGamma_zG_2 - \operatorname{\mathcal{B}}\operatorname{sgn}(\varGamma_z)G_4 & \mbox{if}\ p_z=0, \end{array}\right. \end{equation}with
 \begin{gather} G_1 = R^2+\varPsi_+^2-\varPsi_-^2-1-2R^2\log\left(\frac{R\varPsi_+}{\varPsi_-}\right), \end{gather}
\begin{gather} G_1 = R^2+\varPsi_+^2-\varPsi_-^2-1-2R^2\log\left(\frac{R\varPsi_+}{\varPsi_-}\right), \end{gather} \begin{gather} G_2 = \log\left(\frac{R\varPsi_+}{\varPsi_-}\right),\quad G_3 = 1-\varPsi_+,\quad G_4 = R-\varPsi_-. \end{gather}
\begin{gather} G_2 = \log\left(\frac{R\varPsi_+}{\varPsi_-}\right),\quad G_3 = 1-\varPsi_+,\quad G_4 = R-\varPsi_-. \end{gather}Equations (2.27)–(2.32) are solved subject to the boundary conditions
 \begin{equation} R_z = Q = w_s\varGamma = 0, \quad\mbox{at}\ z=\{0,L\}, \end{equation}
\begin{equation} R_z = Q = w_s\varGamma = 0, \quad\mbox{at}\ z=\{0,L\}, \end{equation}
which completes the long-wave system of equations. Finally, by evaluating the shear stress (A7) at  $r=1$, we can deduce an expression for the stress exerted on the tube wall,
$r=1$, we can deduce an expression for the stress exerted on the tube wall,
 \begin{equation} \tau_w = \frac{p_z}{2}(1-R^2) + R\operatorname{\mathcal{M}}\varGamma_z. \end{equation}
\begin{equation} \tau_w = \frac{p_z}{2}(1-R^2) + R\operatorname{\mathcal{M}}\varGamma_z. \end{equation}2.4. Thin-film theory
We now consider the system in a thin-film limit to derive simpler evolution equations that are more amenable to detailed analysis. In the thin-film theory, we assume that  $|1-R|\ll 1$, but no longer require that
$|1-R|\ll 1$, but no longer require that  $\delta \ll 1$. Rather than presenting a derivation of the thin-film equations from (2.10)–(2.21), here we will show how they can be deduced directly from the long-wave equations (2.27)–(2.33). The flow structure is qualitatively the same and the same five possible yielding types I–V also occur.
$\delta \ll 1$. Rather than presenting a derivation of the thin-film equations from (2.10)–(2.21), here we will show how they can be deduced directly from the long-wave equations (2.27)–(2.33). The flow structure is qualitatively the same and the same five possible yielding types I–V also occur.
We assume that
 \begin{equation} R(z,t) = 1 - \epsilon H(z,t), \end{equation}
\begin{equation} R(z,t) = 1 - \epsilon H(z,t), \end{equation}
where  $\epsilon \ll 1$ and
$\epsilon \ll 1$ and  $H$ is the scaled layer thickness. Similarly, we define the boundaries between fully yielded and plug-like regions,
$H$ is the scaled layer thickness. Similarly, we define the boundaries between fully yielded and plug-like regions,
 \begin{equation} \varPsi_\pm = 1 - \epsilon Y_\mp. \end{equation}
\begin{equation} \varPsi_\pm = 1 - \epsilon Y_\mp. \end{equation}
Since  $\varPsi _+\geq \varPsi _-$, the definitions (2.36) mean
$\varPsi _+\geq \varPsi _-$, the definitions (2.36) mean  $Y_+\geq Y_-$. Other relevant variables are rescaled by defining
$Y_+\geq Y_-$. Other relevant variables are rescaled by defining
 \begin{equation} \tilde{p} = \frac{1+p}{\epsilon},\quad\tilde{\kappa} = \frac{\kappa-1}{\epsilon},\quad \tilde{t}=\epsilon^3t, \quad {\tilde{\boldsymbol{\tau}} = \frac{\boldsymbol{\tau}}{\epsilon^2}}, \end{equation}
\begin{equation} \tilde{p} = \frac{1+p}{\epsilon},\quad\tilde{\kappa} = \frac{\kappa-1}{\epsilon},\quad \tilde{t}=\epsilon^3t, \quad {\tilde{\boldsymbol{\tau}} = \frac{\boldsymbol{\tau}}{\epsilon^2}}, \end{equation}and the scaled capillary Bingham and Marangoni numbers are given respectively by
 \begin{equation} {B} = \frac{\operatorname{\mathcal{B}}}{\epsilon^2} = \frac{a\tau_y}{\sigma_0\epsilon^2}\quad\mathrm{and}\quad M = \frac{\operatorname{\mathcal{M}}}{\epsilon^2} = \frac{K\varGamma_0}{\sigma_0\epsilon^2}. \end{equation}
\begin{equation} {B} = \frac{\operatorname{\mathcal{B}}}{\epsilon^2} = \frac{a\tau_y}{\sigma_0\epsilon^2}\quad\mathrm{and}\quad M = \frac{\operatorname{\mathcal{M}}}{\epsilon^2} = \frac{K\varGamma_0}{\sigma_0\epsilon^2}. \end{equation}
We then insert (2.35)–(2.38) into the long-wave equations (2.23)–(2.33) and truncate at leading order in  $\epsilon$. From (2.23), the thin-film capillary pressure gradient is given by
$\epsilon$. From (2.23), the thin-film capillary pressure gradient is given by
 \begin{equation} \tilde{p}_z = - \tilde\kappa_z = - H_z-H_{zzz} \end{equation}
\begin{equation} \tilde{p}_z = - \tilde\kappa_z = - H_z-H_{zzz} \end{equation}
to leading order in  $\epsilon$. (Unlike in the thick-film case (2.23), surfactant has no effect on the mean surface tension at leading order in the thin-film limit.) Note that with the scalings (2.37) and (2.38),
$\epsilon$. (Unlike in the thick-film case (2.23), surfactant has no effect on the mean surface tension at leading order in the thin-film limit.) Note that with the scalings (2.37) and (2.38),  $2\operatorname {\mathcal {M}}\varGamma _z/R{p}_z=O(\epsilon )$, so in the thin-film theory, we always have
$2\operatorname {\mathcal {M}}\varGamma _z/R{p}_z=O(\epsilon )$, so in the thin-film theory, we always have  $2\operatorname {\mathcal {M}}\varGamma _z/R{p}_z<1$. This simplifies (2.26) somewhat, giving
$2\operatorname {\mathcal {M}}\varGamma _z/R{p}_z<1$. This simplifies (2.26) somewhat, giving  $Y_\pm =\max [0,\min (H,\mathcal {Y}_\pm )]$ where
$Y_\pm =\max [0,\min (H,\mathcal {Y}_\pm )]$ where
 \begin{equation} \mathcal{Y}_\pm = H + \frac{{M}\varGamma_z}{p_z}\pm\frac{B}{|p_z|}, \end{equation}
\begin{equation} \mathcal{Y}_\pm = H + \frac{{M}\varGamma_z}{p_z}\pm\frac{B}{|p_z|}, \end{equation}
assuming for now that  $p_z\neq 0$. As in § 2.3, we can present criteria for each of the five yielding types to occur based on the values of
$p_z\neq 0$. As in § 2.3, we can present criteria for each of the five yielding types to occur based on the values of  $Y_\pm$ (as in figure 2a): I, internal pseudo-plug (
$Y_\pm$ (as in figure 2a): I, internal pseudo-plug ( $0< Y_-< Y_+< H$); II, surface pseudo-plug (
$0< Y_-< Y_+< H$); II, surface pseudo-plug ( $0< Y_-< H=Y_+$); III, fully yielded (
$0< Y_-< H=Y_+$); III, fully yielded ( $Y_\pm =0$ or
$Y_\pm =0$ or  $Y_\pm =H$); IV, near-wall plug (
$Y_\pm =H$); IV, near-wall plug ( $Y_-=0< Y_+< H$); V, fully rigid (
$Y_-=0< Y_+< H$); V, fully rigid ( $Y_-=0$ and
$Y_-=0$ and  $Y_+=H$). Figure 2(c) illustrates where in
$Y_+=H$). Figure 2(c) illustrates where in  $(H\tilde {p}_z/B,M\varGamma _z/B)$-space each of types I–V occurs. The picture is similar to figure 2(b), which was described in detail above, but is somewhat simplified.
$(H\tilde {p}_z/B,M\varGamma _z/B)$-space each of types I–V occurs. The picture is similar to figure 2(b), which was described in detail above, but is somewhat simplified.
The evolution equation (2.27), to leading order in  $\epsilon$, becomes
$\epsilon$, becomes
 \begin{equation} H_{\tilde{t}} + q_z = 0, \end{equation}
\begin{equation} H_{\tilde{t}} + q_z = 0, \end{equation}where the scaled axial volume flux is
 $$\begin{gather} q = - \frac{1}{3}\tilde{p}_z[H^3+(H-Y_+)^3-(H-Y_-)^3]-\frac{1}{2}M\varGamma_z[H^2-(H-Y_-)^2+(H-Y_+)^2]\nonumber\\ +\frac{1}{2}B\operatorname{sgn}(\tilde{p}_z)[H^2-(H-Y_-)^2-(H-Y_+)^2], \end{gather}$$
$$\begin{gather} q = - \frac{1}{3}\tilde{p}_z[H^3+(H-Y_+)^3-(H-Y_-)^3]-\frac{1}{2}M\varGamma_z[H^2-(H-Y_-)^2+(H-Y_+)^2]\nonumber\\ +\frac{1}{2}B\operatorname{sgn}(\tilde{p}_z)[H^2-(H-Y_-)^2-(H-Y_+)^2], \end{gather}$$
if  $\tilde {p}_z\neq 0$. When
$\tilde {p}_z\neq 0$. When  $\tilde {p}_z=0$, the flux is
$\tilde {p}_z=0$, the flux is  $q=-\tfrac {1}{2}\operatorname {sgn}(\varGamma _z)H^2(|M\varGamma _z|-B)$ if
$q=-\tfrac {1}{2}\operatorname {sgn}(\varGamma _z)H^2(|M\varGamma _z|-B)$ if  $|M\varGamma _z|>B$, and
$|M\varGamma _z|>B$, and  $q=0$ if
$q=0$ if  $|M\varGamma _z|\leq B$. As can be seen in figure 2(c), when
$|M\varGamma _z|\leq B$. As can be seen in figure 2(c), when  $\tilde {p}_z=0$, the only type of yielding possible is type III, which occurs if
$\tilde {p}_z=0$, the only type of yielding possible is type III, which occurs if  $|M\varGamma _z|>B$; the layer is rigid (type V) if
$|M\varGamma _z|>B$; the layer is rigid (type V) if  $|M\varGamma _z|\leq B$.
$|M\varGamma _z|\leq B$.
The surfactant transport equation (2.30), at leading order, becomes
 \begin{equation} \varGamma_{\tilde{t}} + [\tilde{w}_s\varGamma]_z = 0, \end{equation}
\begin{equation} \varGamma_{\tilde{t}} + [\tilde{w}_s\varGamma]_z = 0, \end{equation}where the scaled surface velocity is
 $$\begin{gather} \tilde{w}_s = - \frac{1}{2}\tilde{p}_z[H^2+(H-Y_+)^2-(H-Y_-)^2] - M\varGamma_z(H+Y_- - Y_+)\nonumber\\ -B\operatorname{sgn}(\tilde{p}_z)(H-Y_- - Y_+), \end{gather}$$
$$\begin{gather} \tilde{w}_s = - \frac{1}{2}\tilde{p}_z[H^2+(H-Y_+)^2-(H-Y_-)^2] - M\varGamma_z(H+Y_- - Y_+)\nonumber\\ -B\operatorname{sgn}(\tilde{p}_z)(H-Y_- - Y_+), \end{gather}$$
if  $\tilde {p}_z\neq 0$. When
$\tilde {p}_z\neq 0$. When  $\tilde {p}_z=0$, the surface velocity is
$\tilde {p}_z=0$, the surface velocity is  $\tilde {w}_s = -\operatorname {sgn}(\varGamma _z)H(|M\varGamma _z|-B)$ if
$\tilde {w}_s = -\operatorname {sgn}(\varGamma _z)H(|M\varGamma _z|-B)$ if  $|M\varGamma _z|>B$ and
$|M\varGamma _z|>B$ and  $\tilde {w}_s=0$ if
$\tilde {w}_s=0$ if  $|M\varGamma _z|\leq B$. From (2.40) and (2.44), we can deduce that if
$|M\varGamma _z|\leq B$. From (2.40) and (2.44), we can deduce that if  $H\tilde {p}_z=-2M\varGamma _z$, then
$H\tilde {p}_z=-2M\varGamma _z$, then  $Y_-=H-Y_+$ and
$Y_-=H-Y_+$ and  $\tilde {w}_s=0$, meaning that the interface of the layer is immobilised. This line is included in figure 2(c) and will form part of our later discussion. The lateral boundary conditions (2.33) reduce in the thin-film limit to
$\tilde {w}_s=0$, meaning that the interface of the layer is immobilised. This line is included in figure 2(c) and will form part of our later discussion. The lateral boundary conditions (2.33) reduce in the thin-film limit to
 \begin{equation} H_z = q = \varGamma \tilde{w}_s = 0, \quad\mathrm{at} \ z= \{0,L\}. \end{equation}
\begin{equation} H_z = q = \varGamma \tilde{w}_s = 0, \quad\mathrm{at} \ z= \{0,L\}. \end{equation}Equations (2.40)–(2.44) with boundary conditions (2.45) comprise the thin-film system. The wall shear stress (2.34), in the thin-film limit, becomes
 \begin{equation} \tilde{\tau}_w = H\tilde{p}_z + M\varGamma_z. \end{equation}
\begin{equation} \tilde{\tau}_w = H\tilde{p}_z + M\varGamma_z. \end{equation}2.5. Solution methods
When solving the thin-film or long-wave equations numerically, we use initial conditions with a uniform surfactant concentration across the layer and a perturbation to the interface height with wavelength  $2L$. For the thin-film equations, these initial conditions are
$2L$. For the thin-film equations, these initial conditions are
 \begin{equation} H(z,t=0) = 1 - A \cos\left(\frac{{\rm \pi} z}{L}\right),\quad \varGamma(z,t=0) = 1, \end{equation}
\begin{equation} H(z,t=0) = 1 - A \cos\left(\frac{{\rm \pi} z}{L}\right),\quad \varGamma(z,t=0) = 1, \end{equation}and for the long-wave equations, the equivalent conditions are
 \begin{equation} R(z,t=0) = \sqrt{(1-\epsilon)^2-\epsilon^2 A^2/2}-\epsilon A\cos\left(\frac{{\rm \pi} z}{L}\right), \quad \varGamma(z,t=0) = 1, \end{equation}
\begin{equation} R(z,t=0) = \sqrt{(1-\epsilon)^2-\epsilon^2 A^2/2}-\epsilon A\cos\left(\frac{{\rm \pi} z}{L}\right), \quad \varGamma(z,t=0) = 1, \end{equation}
where  $A$ is the amplitude of the initial perturbation and
$A$ is the amplitude of the initial perturbation and  $\epsilon$ is the ratio of the average layer thickness to the tube radius when
$\epsilon$ is the ratio of the average layer thickness to the tube radius when  $A=0$. The constant term in (2.48) ensures that the volume of fluid is independent of
$A=0$. The constant term in (2.48) ensures that the volume of fluid is independent of  $A$. As noted for the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), when the fluid is viscoplastic, there is no linear instability since a finite-amplitude initial perturbation is required to yield.
$A$. As noted for the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), when the fluid is viscoplastic, there is no linear instability since a finite-amplitude initial perturbation is required to yield.
For ease of comparison with the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) and other related studies (Gauglitz & Radke Reference Gauglitz and Radke1988; Halpern et al. Reference Halpern, Fujioka and Grotberg2010), we solve the equations in a domain of length  ${L=\sqrt {2}{\rm \pi} }$. This is the domain length that can accommodate the most unstable mode in the Newtonian linear stability analysis (Hammond Reference Hammond1983). The initial perturbation applied to the layer then corresponds to the one unstable Fourier mode that exists in the domain. Although this value of
${L=\sqrt {2}{\rm \pi} }$. This is the domain length that can accommodate the most unstable mode in the Newtonian linear stability analysis (Hammond Reference Hammond1983). The initial perturbation applied to the layer then corresponds to the one unstable Fourier mode that exists in the domain. Although this value of  $L$ is not necessarily of unique importance in the viscoplastic problem, we do not observe any qualitative changes in the results when
$L$ is not necessarily of unique importance in the viscoplastic problem, we do not observe any qualitative changes in the results when  $L$ is changed by relatively small amounts. As in the surfactant-free problem, since there is nothing in the model equations that could break symmetry around the lateral boundaries of the domain, the boundary conditions (2.33) and (2.45) yield the same solutions as would be found using periodic boundary conditions. Symmetry rather than periodic boundary conditions allows a finer grid to be used for the spatial finite differencing at the same computational expense, since the computational domain is shorter.
$L$ is changed by relatively small amounts. As in the surfactant-free problem, since there is nothing in the model equations that could break symmetry around the lateral boundaries of the domain, the boundary conditions (2.33) and (2.45) yield the same solutions as would be found using periodic boundary conditions. Symmetry rather than periodic boundary conditions allows a finer grid to be used for the spatial finite differencing at the same computational expense, since the computational domain is shorter.
To solve both the long-wave equations and the thin-film equations numerically, we use a regularisation introduced by Jalaal (Reference Jalaal2016), which was used for the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) and has also been used for several other viscoplastic thin-film problems (Balmforth et al. Reference Balmforth, Ghadge and Myers2007; Jalaal et al. Reference Jalaal, Stoeber and Balmforth2021). We define  $\hat {Y}_\pm =\max (Y_{min},Y_\pm )$ and
$\hat {Y}_\pm =\max (Y_{min},Y_\pm )$ and  $\hat {\varPsi }_\pm =\min (1-Y_{min},\varPsi _\pm )$ where
$\hat {\varPsi }_\pm =\min (1-Y_{min},\varPsi _\pm )$ where  $Y_{min}$ is a small parameter, and replace
$Y_{min}$ is a small parameter, and replace  $Y_\pm$ and
$Y_\pm$ and  $\varPsi _\pm$ with
$\varPsi _\pm$ with  $\hat {Y}_\pm$ and
$\hat {Y}_\pm$ and  $\hat {\varPsi }_\pm$, respectively, in the equations. We choose
$\hat {\varPsi }_\pm$, respectively, in the equations. We choose  $Y_{min}=10^{-8}$ for all simulations, which is small enough that the exact value does not affect the results. To solve the resulting equations, the domain
$Y_{min}=10^{-8}$ for all simulations, which is small enough that the exact value does not affect the results. To solve the resulting equations, the domain  $0\leq z\leq L$ is discretised into a grid of
$0\leq z\leq L$ is discretised into a grid of  $N$ evenly spaced points (we typically use
$N$ evenly spaced points (we typically use  $N=200$), the spatial derivatives are approximated by second-order central finite differences and then the equations are time-stepped using an ordinary differential equation (ODE) solver in matlab.
$N=200$), the spatial derivatives are approximated by second-order central finite differences and then the equations are time-stepped using an ordinary differential equation (ODE) solver in matlab.
3. Thin films
3.1. Time evolution of a surfactant-laden thin film
Figure 3(a) shows snapshots from a sample numerical solution of the thin-film system. At  $\tilde {t}=0$, the initial perturbation amplitude,
$\tilde {t}=0$, the initial perturbation amplitude,  $A$, is large enough that the layer is yielded in a region in the centre of the domain with a fully yielded region at the base of the layer. At very early times, this yielded region spreads to cover the whole domain by
$A$, is large enough that the layer is yielded in a region in the centre of the domain with a fully yielded region at the base of the layer. At very early times, this yielded region spreads to cover the whole domain by  $\tilde {t}=5$. In this very-early-time period,
$\tilde {t}=5$. In this very-early-time period,  $\varGamma _z$ remains small, so the dynamics are essentially uninfluenced by the presence of surfactant. The behaviour is qualitatively the same as in the early-time yielding period described previously for the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Figure 3(b) shows that there is a delay in the initial growth of the instability compared with a Newtonian (
$\varGamma _z$ remains small, so the dynamics are essentially uninfluenced by the presence of surfactant. The behaviour is qualitatively the same as in the early-time yielding period described previously for the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Figure 3(b) shows that there is a delay in the initial growth of the instability compared with a Newtonian ( $B=0$) simulation, and that the delay is approximately equal in the surfactant-free viscoplastic simulation. After this early-time period, however, figure 3(b) shows that the growth rate of the instability is reduced by the presence of surfactant.
$B=0$) simulation, and that the delay is approximately equal in the surfactant-free viscoplastic simulation. After this early-time period, however, figure 3(b) shows that the growth rate of the instability is reduced by the presence of surfactant.

Figure 3. (a) Snapshots from a numerical solution of the thin-film evolution equations (2.40)–(2.45) with  $B=0.04$,
$B=0.04$,  $M=0.2$,
$M=0.2$,  $A=0.2$ at
$A=0.2$ at  $\tilde {t}=\{0,5,80,100,130,250,500,2000\}$. At each
$\tilde {t}=\{0,5,80,100,130,250,500,2000\}$. At each  $\tilde {t}$, there are three panels: the top panel shows the layer evolving, with
$\tilde {t}$, there are three panels: the top panel shows the layer evolving, with  $Y_-$ (cyan) and
$Y_-$ (cyan) and  $Y_+$ (red), and the thin-film axial velocity
$Y_+$ (red), and the thin-film axial velocity  $\tilde {w}$ represented by the colour map; the middle panel shows plots of
$\tilde {w}$ represented by the colour map; the middle panel shows plots of  $\tilde {p}_z$ (magenta),
$\tilde {p}_z$ (magenta),  $\varGamma$ (green) and
$\varGamma$ (green) and  $10\varGamma _z$ (blue); the bottom panel shows the solution in
$10\varGamma _z$ (blue); the bottom panel shows the solution in  $(H\tilde {p}_z/B$,
$(H\tilde {p}_z/B$, $M\varGamma _z/B$)-space, in dotted black lines, with the dots corresponding to points evenly spaced along the domain
$M\varGamma _z/B$)-space, in dotted black lines, with the dots corresponding to points evenly spaced along the domain  $0< z< L$ and the arrows indicating the direction of increasing
$0< z< L$ and the arrows indicating the direction of increasing  $z$. Red diamonds in the first and third panels mark the boundaries of the region where there is yielding at the interface. (b) Time evolution of
$z$. Red diamonds in the first and third panels mark the boundaries of the region where there is yielding at the interface. (b) Time evolution of  $\max _zH$ from the same simulation (solid) compared with the evolution of
$\max _zH$ from the same simulation (solid) compared with the evolution of  $\max _zH$ from a Newtonian surfactant-laden simulation with
$\max _zH$ from a Newtonian surfactant-laden simulation with  $(B,M)=(0,0.2)$ (dashed), a surfactant-free viscoplastic simulation with
$(B,M)=(0,0.2)$ (dashed), a surfactant-free viscoplastic simulation with  $(B,M)=(0.04,0)$ (dash-dotted) and a surfactant-free Newtonian simulation with
$(B,M)=(0.04,0)$ (dash-dotted) and a surfactant-free Newtonian simulation with  $(B,M)=(0,0)$ (dotted). (c) Time evolution of
$(B,M)=(0,0)$ (dotted). (c) Time evolution of  $\max _zY_-$ (solid red),
$\max _zY_-$ (solid red),  $\max _z(H-Y_+)$ (solid blue) and
$\max _z(H-Y_+)$ (solid blue) and  $\max _z(|\tilde {\tau }_w|-B)$ (solid black) for the simulation in panel (a). Also shown are plots of
$\max _z(|\tilde {\tau }_w|-B)$ (solid black) for the simulation in panel (a). Also shown are plots of  $\max _zY_ - $ (dash-dotted red) and
$\max _zY_ - $ (dash-dotted red) and  $\max _z(|\tilde {\tau }_w|-B)$ (dash-dotted black) for the surfactant-free viscoplastic simulation
$\max _z(|\tilde {\tau }_w|-B)$ (dash-dotted black) for the surfactant-free viscoplastic simulation  $(B=0.04,M=0)$.
$(B=0.04,M=0)$.
Between  $\tilde {t}=5$ and
$\tilde {t}=5$ and  $\tilde {t}=80$ (figure 3a), significant gradients in surfactant concentration develop, and at
$\tilde {t}=80$ (figure 3a), significant gradients in surfactant concentration develop, and at  $\tilde {t}\approx 80$, a fully yielded region at the interface, where
$\tilde {t}\approx 80$, a fully yielded region at the interface, where  $M\varGamma _z$ exceeds
$M\varGamma _z$ exceeds  $B$, appears near the centre of the domain. This yielded region grows and has extended across the whole interface by
$B$, appears near the centre of the domain. This yielded region grows and has extended across the whole interface by  $\tilde {t}=500$. During the intermediate period,
$\tilde {t}=500$. During the intermediate period,  $80<\tilde {t}<500$, the two lateral edges of the upper yielded region propagate towards the side boundaries; these coincide with the location of two gradually steepening travelling wave fronts in
$80<\tilde {t}<500$, the two lateral edges of the upper yielded region propagate towards the side boundaries; these coincide with the location of two gradually steepening travelling wave fronts in  $\varGamma _z$. At
$\varGamma _z$. At  $\tilde {t}=130$, the right-travelling wave in
$\tilde {t}=130$, the right-travelling wave in  $\varGamma _z$ near
$\varGamma _z$ near  $z=4$ resembles a discontinuous shock wave. The sudden decrease in
$z=4$ resembles a discontinuous shock wave. The sudden decrease in  $\varGamma _z$ across the shock results in a rise in
$\varGamma _z$ across the shock results in a rise in  $Y_-$ just ahead of the shock where the Marangoni force is weaker. Similarly, at
$Y_-$ just ahead of the shock where the Marangoni force is weaker. Similarly, at  $\tilde {t}=250$, a shock-like discontinuity has developed in
$\tilde {t}=250$, a shock-like discontinuity has developed in  $\varGamma _z$ in the left-travelling wave as it approaches
$\varGamma _z$ in the left-travelling wave as it approaches  $z=0$, and a small rise in
$z=0$, and a small rise in  $Y_-$ can be observed ahead of the wave.
$Y_-$ can be observed ahead of the wave.
Once we observe that a shock has developed in  $\varGamma _z$, we can use (2.43) to derive a Rankine–Hugoniot condition (see Appendix B), which provides the relation
$\varGamma _z$, we can use (2.43) to derive a Rankine–Hugoniot condition (see Appendix B), which provides the relation
 \begin{equation} u_s = \frac{[(\tilde{w}_s\varGamma)_z]_-^+}{[\varGamma_z]_-^+}\end{equation}
\begin{equation} u_s = \frac{[(\tilde{w}_s\varGamma)_z]_-^+}{[\varGamma_z]_-^+}\end{equation}
for the shock propagation speed,  $u_s$, in terms of the sizes of jumps in
$u_s$, in terms of the sizes of jumps in  $\varGamma _z$ and
$\varGamma _z$ and  $(\tilde {w}_s\varGamma )_z$ across the discontinuity. We have already noted how the jump in
$(\tilde {w}_s\varGamma )_z$ across the discontinuity. We have already noted how the jump in  $\varGamma _z$ across the shock affects the yielding behaviour on either side, but (3.1) also shows that the yielding behaviour, via
$\varGamma _z$ across the shock affects the yielding behaviour on either side, but (3.1) also shows that the yielding behaviour, via  $\tilde {w}_s$, influences the shock propagation, highlighting the coupling between rheology and surfactant transport. Although our numerical method does not actively track the shock location, the speed of shock propagation observed in the simulations agrees well with
$\tilde {w}_s$, influences the shock propagation, highlighting the coupling between rheology and surfactant transport. Although our numerical method does not actively track the shock location, the speed of shock propagation observed in the simulations agrees well with  $u_s$ calculated via (3.1) (data not shown here), providing evidence that the numerics accurately capture the behaviour around the shock.
$u_s$ calculated via (3.1) (data not shown here), providing evidence that the numerics accurately capture the behaviour around the shock.
Throughout the intermediate-time period described above, the regions ahead of the shock waves exhibit yield type II (surface pseudo-plug) while the central region behind the shocks exhibits yield type I (internal pseudo-plug). At  $\tilde {t}=80$,
$\tilde {t}=80$,  $\tilde {t}=100$ and
$\tilde {t}=100$ and  $\tilde {t}=130$, at both side boundaries, the solution in
$\tilde {t}=130$, at both side boundaries, the solution in  $(H\tilde {p}_z$/B,
$(H\tilde {p}_z$/B, $M\varGamma _z/B)$-space approaches
$M\varGamma _z/B)$-space approaches  $(H\tilde {p}_z/B,M\varGamma _z/B)=(0,-1)$. This indicates that near the side boundaries, capillary forces are small and Marangoni forces dominate. Unlike in the clean problem, where
$(H\tilde {p}_z/B,M\varGamma _z/B)=(0,-1)$. This indicates that near the side boundaries, capillary forces are small and Marangoni forces dominate. Unlike in the clean problem, where  $Y_-\rightarrow 0$ as
$Y_-\rightarrow 0$ as  $z\rightarrow 0$ or
$z\rightarrow 0$ or  $z\rightarrow L$, here, due to the presence of Marangoni forces,
$z\rightarrow L$, here, due to the presence of Marangoni forces,  $Y_-$ is not necessarily zero at the side boundaries. The value of
$Y_-$ is not necessarily zero at the side boundaries. The value of  $Y_-$ in the limits
$Y_-$ in the limits  $z\rightarrow 0$ or
$z\rightarrow 0$ or  $z\rightarrow L$ during this period is given by
$z\rightarrow L$ during this period is given by  $\lim _{z\rightarrow 0,L}(H-M\varGamma _{zz}/\tilde {p}_{zz})$, which can be seen to take a positive value in figure 3(a) for
$\lim _{z\rightarrow 0,L}(H-M\varGamma _{zz}/\tilde {p}_{zz})$, which can be seen to take a positive value in figure 3(a) for  $80\leq \tilde {t}\leq 130$.
$80\leq \tilde {t}\leq 130$.
Once the shock waves have propagated to the side boundaries, the evolution enters a late-time regime where the upper and lower yielded regions extend across the whole layer while getting gradually smaller, indicating that the layer is rigidifying. Both  $Y_-$ and
$Y_-$ and  $H-Y_+$ tend towards zero at a rate proportional to
$H-Y_+$ tend towards zero at a rate proportional to  $1/t$ (figure 3c). It can also be seen that in
$1/t$ (figure 3c). It can also be seen that in  $(H\tilde {p}_z/B,M\varGamma _z/B)$-space (figure 3a,
$(H\tilde {p}_z/B,M\varGamma _z/B)$-space (figure 3a,  $\tilde {t}=500,2000$), the whole solution is close to the line
$\tilde {t}=500,2000$), the whole solution is close to the line  $M\varGamma _z+\tfrac {1}{2}H\tilde {p}_z=0$. This indicates that
$M\varGamma _z+\tfrac {1}{2}H\tilde {p}_z=0$. This indicates that  $H-Y_+\approx Y_-$, and so
$H-Y_+\approx Y_-$, and so  $\tilde {w}_s\approx 0$ from (2.44), meaning the interface is approximately immobilised at late times. As the layer approaches its final static shape, all points in the domain converge towards
$\tilde {w}_s\approx 0$ from (2.44), meaning the interface is approximately immobilised at late times. As the layer approaches its final static shape, all points in the domain converge towards  $(H\tilde {p}_z/B,M\varGamma _z/B)=(-2,1)$ (figure 3a,
$(H\tilde {p}_z/B,M\varGamma _z/B)=(-2,1)$ (figure 3a,  $\tilde {t}=2000$). Hence, when the layer reaches its final static shape, the capillary stress is twice as strong as the Marangoni stress and they act in opposite directions, with the resultant magnitude of stress exactly equal to
$\tilde {t}=2000$). Hence, when the layer reaches its final static shape, the capillary stress is twice as strong as the Marangoni stress and they act in opposite directions, with the resultant magnitude of stress exactly equal to  $B$. From this, we can deduce that at late times, the layer approaches a marginally yielded static shape,
$B$. From this, we can deduce that at late times, the layer approaches a marginally yielded static shape,  $H\rightarrow H_0(z;B)$ as
$H\rightarrow H_0(z;B)$ as  $\tilde {t}\rightarrow \infty$, which satisfies
$\tilde {t}\rightarrow \infty$, which satisfies
 \begin{equation} H_0(H_{0,z}+H_{0,zzz}) = 2B,\end{equation}
\begin{equation} H_0(H_{0,z}+H_{0,zzz}) = 2B,\end{equation}
whilst  $M\varGamma \rightarrow M\varGamma _0$ as
$M\varGamma \rightarrow M\varGamma _0$ as  $\tilde {t}\rightarrow \infty$ where
$\tilde {t}\rightarrow \infty$ where  $\varGamma _0$ has a linear profile with slope
$\varGamma _0$ has a linear profile with slope  $B/M$ and mass
$B/M$ and mass  $L$ over
$L$ over  $0< z< L$,
$0< z< L$,
 \begin{equation} M\varGamma_0 = M - \frac{BL}{2} + Bz. \end{equation}
\begin{equation} M\varGamma_0 = M - \frac{BL}{2} + Bz. \end{equation}
For the solution (3.2b) to be valid, it must have  $\varGamma _0\geq 0$ everywhere, or specifically
$\varGamma _0\geq 0$ everywhere, or specifically  $2M\geq BL$. Indeed, we observe that in simulations with
$2M\geq BL$. Indeed, we observe that in simulations with  $2M< BL$,
$2M< BL$,  $H$ and
$H$ and  $\varGamma$ do not approach
$\varGamma$ do not approach  $H_0$ and
$H_0$ and  $\varGamma _0$ at late times, but rather approach different static solutions: we will discuss this in more detail in § 3.3. Until then, we will focus attention on the case where
$\varGamma _0$ at late times, but rather approach different static solutions: we will discuss this in more detail in § 3.3. Until then, we will focus attention on the case where  $M$ is sufficiently large that a solution of (3.2) is approached at late times.
$M$ is sufficiently large that a solution of (3.2) is approached at late times.
In the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), the late-time static solution for  $H$ also satisfies the ODE (3.2a) but with
$H$ also satisfies the ODE (3.2a) but with  $2B$ replaced by
$2B$ replaced by  $B$. Hence, the presence of sufficiently strong surfactant effectively doubles the capillary Bingham number in relation to the layer's final shape. In keeping with this observation, figure 3(b) indicates the decreased late-time height of the layer compared with the clean viscoplastic problem. Figure 3(c) shows the evolution of
$B$. Hence, the presence of sufficiently strong surfactant effectively doubles the capillary Bingham number in relation to the layer's final shape. In keeping with this observation, figure 3(b) indicates the decreased late-time height of the layer compared with the clean viscoplastic problem. Figure 3(c) shows the evolution of  $\max _z(|\tilde {\tau }_w|)$, the maximum value of the shear stress exerted on the tube wall, showing that it peaks around
$\max _z(|\tilde {\tau }_w|)$, the maximum value of the shear stress exerted on the tube wall, showing that it peaks around  $\tilde {t}\approx 100$ and then approaches
$\tilde {t}\approx 100$ and then approaches  $B$ at late times. The comparison with the surfactant-free simulation in the same figure shows that introducing surfactant reduces the peak in the wall stress.
$B$ at late times. The comparison with the surfactant-free simulation in the same figure shows that introducing surfactant reduces the peak in the wall stress.
3.2. Late-time dynamics of a thin film
To predict the late-time behaviour of the layer, we propose an asymptotic solution for  $\tilde {t}\gg 1$. Inspired by observations from numerical simulations such as figure 3, we make expansions of the form
$\tilde {t}\gg 1$. Inspired by observations from numerical simulations such as figure 3, we make expansions of the form
 \begin{equation} \left. \begin{gathered} H = H_0 + \frac{H_1}{Bt}+\cdots,\quad \varGamma = \varGamma_0 + \frac{\varGamma_1}{Bt}+\cdots,\quad Y_+ = H_0 + \frac{Y_{+,1}}{Bt}+\cdots,\\ Y_- = \frac{Y_{-,1}}{Bt}+\cdots, \quad \partial_zp = \partial_zp_0 + \frac{\partial_zp_1}{Bt}+\cdots = - \frac{2B}{H_0} - \frac{(\partial_z+\partial_z^3)H_1}{Bt} + \cdots, \end{gathered} \right\} \end{equation}
\begin{equation} \left. \begin{gathered} H = H_0 + \frac{H_1}{Bt}+\cdots,\quad \varGamma = \varGamma_0 + \frac{\varGamma_1}{Bt}+\cdots,\quad Y_+ = H_0 + \frac{Y_{+,1}}{Bt}+\cdots,\\ Y_- = \frac{Y_{-,1}}{Bt}+\cdots, \quad \partial_zp = \partial_zp_0 + \frac{\partial_zp_1}{Bt}+\cdots = - \frac{2B}{H_0} - \frac{(\partial_z+\partial_z^3)H_1}{Bt} + \cdots, \end{gathered} \right\} \end{equation}
where  $\varGamma _0$ is given by (3.2b) and
$\varGamma _0$ is given by (3.2b) and  $H_0$ is a solution to (3.2a). For all of the analysis in this section, we will assume that
$H_0$ is a solution to (3.2a). For all of the analysis in this section, we will assume that  $2M\geq BL$, so (3.2b) is a valid solution. We will also assume that
$2M\geq BL$, so (3.2b) is a valid solution. We will also assume that  $Y_{-,1}>0$ and
$Y_{-,1}>0$ and  $Y_{+,1}<0$ for
$Y_{+,1}<0$ for  $0< z< L$, since we observe in numerical simulations (e.g. figure 3) that the whole layer exhibits yielding of type I when it is in this late-time regime. We will subsequently confirm that the resulting solution is consistent with simulations. Substituting (3.3) into (2.40)–(2.42) gives
$0< z< L$, since we observe in numerical simulations (e.g. figure 3) that the whole layer exhibits yielding of type I when it is in this late-time regime. We will subsequently confirm that the resulting solution is consistent with simulations. Substituting (3.3) into (2.40)–(2.42) gives
 \begin{align} H_1 = \partial_z(Y_{-,1}^2),\quad Y_{+,1} = H_1 - \frac{H_0}{2B}M\partial_z\varGamma_{1},\quad Y_{-,1} = Y_{+,1} + \frac{H_0^2}{2B}(\partial_z+\partial_z^3)H_1. \end{align}
\begin{align} H_1 = \partial_z(Y_{-,1}^2),\quad Y_{+,1} = H_1 - \frac{H_0}{2B}M\partial_z\varGamma_{1},\quad Y_{-,1} = Y_{+,1} + \frac{H_0^2}{2B}(\partial_z+\partial_z^3)H_1. \end{align}Inserting (3.3) into the surface velocity (2.44) gives, to leading order,
 \begin{equation} \tilde{w}_s \sim \frac{1}{B^2t^2}W_1, \quad \mathrm{where}\ W_1 = \frac{BY_{-,1}^2}{H_0}-\frac{H_0}{4B}(M\partial_z\varGamma_{1})^2, \end{equation}
\begin{equation} \tilde{w}_s \sim \frac{1}{B^2t^2}W_1, \quad \mathrm{where}\ W_1 = \frac{BY_{-,1}^2}{H_0}-\frac{H_0}{4B}(M\partial_z\varGamma_{1})^2, \end{equation}and the transport equation (2.43) gives
 \begin{equation} B\varGamma_1 = \partial_z\left(\varGamma_0W_1\right). \end{equation}
\begin{equation} B\varGamma_1 = \partial_z\left(\varGamma_0W_1\right). \end{equation}The boundary conditions (2.45) imply
 \begin{equation} \partial_zH_0 = \partial_zH_1 = Y_{-,1} = W_1 = 0, \quad\mathrm{at}\ z= \{0,L\}, \end{equation}
\begin{equation} \partial_zH_0 = \partial_zH_1 = Y_{-,1} = W_1 = 0, \quad\mathrm{at}\ z= \{0,L\}, \end{equation}and mass conservation implies
 \begin{equation} \int_0^LH_0\,\mathrm{d}z = L,\quad \int_0^LH_1\,\mathrm{d}z = 0, \quad\int_0^L\varGamma_1\,\mathrm{d}z=0. \end{equation}
\begin{equation} \int_0^LH_0\,\mathrm{d}z = L,\quad \int_0^LH_1\,\mathrm{d}z = 0, \quad\int_0^L\varGamma_1\,\mathrm{d}z=0. \end{equation}We solve (3.2a) and (3.4)–(3.6) numerically subject to (3.7) and (3.8).
There are two branches of solutions for  $H_0$, as shown in figure 4(a), which are the same set of static solutions as computed in the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) but with each corresponding
$H_0$, as shown in figure 4(a), which are the same set of static solutions as computed in the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) but with each corresponding  $B$ halved. The upper-branch solutions are strongly deformed, marginally yielded states that the layer approaches at late times. Figure 4(b) illustrates how the deformation and peak height of these solutions is reduced when surfactant is present compared with when the interface is clean, and figure 4(a) quantifies this effect for varying
$B$ halved. The upper-branch solutions are strongly deformed, marginally yielded states that the layer approaches at late times. Figure 4(b) illustrates how the deformation and peak height of these solutions is reduced when surfactant is present compared with when the interface is clean, and figure 4(a) quantifies this effect for varying  $B$. The lower-branch solutions in figure 4(a) are unstable near-flat marginally yielded states, which in the clean problem were shown to approximate the minimum initial perturbation required to trigger instability (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). We will show in § 3.3 that the lower-branch solutions for the surfactant-laden problem have the same significance when
$B$. The lower-branch solutions in figure 4(a) are unstable near-flat marginally yielded states, which in the clean problem were shown to approximate the minimum initial perturbation required to trigger instability (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). We will show in § 3.3 that the lower-branch solutions for the surfactant-laden problem have the same significance when  $M$ is sufficiently large. Figure 4(a,b) quantify the increased deformation in the lower-branch solutions when surfactant is present compared with when it is not.
$M$ is sufficiently large. Figure 4(a,b) quantify the increased deformation in the lower-branch solutions when surfactant is present compared with when it is not.

Figure 4. (a) Plot of  $\max _zH_0$ for all the solutions to (3.2a) (solid), which are static, marginally yielded solutions to the thin-film equations with surfactant. For comparison, the equivalent plot for the static solutions for the surfactant-free problem, which were computed by Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), is also shown (dotted). The four coloured markers in panel (a) correspond to the example solutions shown in panel (b). All solutions in panel (b) have
$\max _zH_0$ for all the solutions to (3.2a) (solid), which are static, marginally yielded solutions to the thin-film equations with surfactant. For comparison, the equivalent plot for the static solutions for the surfactant-free problem, which were computed by Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), is also shown (dotted). The four coloured markers in panel (a) correspond to the example solutions shown in panel (b). All solutions in panel (b) have  $B=0.05$ but the dotted ones are the solutions for the surfactant-free problem. (c)
$B=0.05$ but the dotted ones are the solutions for the surfactant-free problem. (c)  $O(1/t)$ terms in the late-time expansion (3.3) for a solution with
$O(1/t)$ terms in the late-time expansion (3.3) for a solution with  $B=0.05$ and
$B=0.05$ and  $M=0.5$, showing
$M=0.5$, showing  $H_1$ (solid black),
$H_1$ (solid black),  $Y_{-,1}$ (solid magenta),
$Y_{-,1}$ (solid magenta),  $Y_{+,1}-H_1$ (solid red) and
$Y_{+,1}-H_1$ (solid red) and  $\varGamma _1$ (solid blue). These are compared with the corresponding quantities from a numerical solution of the thin-film equations (2.40)–(2.45) at
$\varGamma _1$ (solid blue). These are compared with the corresponding quantities from a numerical solution of the thin-film equations (2.40)–(2.45) at  $\tilde {t}=10^4$, specifically
$\tilde {t}=10^4$, specifically  $[H(z,\tilde {t}=10^4)-H_0(z)]B\tilde {t}$ (dashed black),
$[H(z,\tilde {t}=10^4)-H_0(z)]B\tilde {t}$ (dashed black),  $Y_-(z,\tilde {t}=10^4)B\tilde {t}$ (dashed magenta),
$Y_-(z,\tilde {t}=10^4)B\tilde {t}$ (dashed magenta),  $[Y_+(z,\tilde {t}=10^4)-H(z,\tilde {t}=10^4)]B\tilde {t}$ (dashed red) and
$[Y_+(z,\tilde {t}=10^4)-H(z,\tilde {t}=10^4)]B\tilde {t}$ (dashed red) and  $[\varGamma (z,\tilde {t}=10^4)-\varGamma _0(z)]B\tilde {t}$ (dashed cyan) where
$[\varGamma (z,\tilde {t}=10^4)-\varGamma _0(z)]B\tilde {t}$ (dashed cyan) where  $\varGamma _0$ is defined in (3.2b). (d) Leading-order surface velocity,
$\varGamma _0$ is defined in (3.2b). (d) Leading-order surface velocity,  $W_1$, scaled by
$W_1$, scaled by  $M$, for
$M$, for  $B=0.05$ and
$B=0.05$ and  $M=\{0.25,0.5,1,2,4,8\}$.
$M=\{0.25,0.5,1,2,4,8\}$.
Figure 4(c) shows the  $O(1/t)$ terms in an example late-time asymptotic solution. There is close agreement between these asymptotics and the numerical solution of the thin-film equations at
$O(1/t)$ terms in an example late-time asymptotic solution. There is close agreement between these asymptotics and the numerical solution of the thin-film equations at  $\tilde {t}=10^4$. Also, figure 4(c) suggests that
$\tilde {t}=10^4$. Also, figure 4(c) suggests that  $Y_{-,1}\approx Y_{+,1}-H_1$, so at late times, the near-wall and near-interface yielded regions have approximately the same size. This implies that the surface velocity,
$Y_{-,1}\approx Y_{+,1}-H_1$, so at late times, the near-wall and near-interface yielded regions have approximately the same size. This implies that the surface velocity,  $\tilde {w}_s$, is approximately zero. We investigate this further by plotting the leading-order surface velocity,
$\tilde {w}_s$, is approximately zero. We investigate this further by plotting the leading-order surface velocity,  $W_1$, for various
$W_1$, for various  $M$ in figure 4(d). As
$M$ in figure 4(d). As  $M$ is increased,
$M$ is increased,  $MW_1$ approaches a fixed curve, indicating that
$MW_1$ approaches a fixed curve, indicating that  $W_1$ is approaching zero at a rate proportional to
$W_1$ is approaching zero at a rate proportional to  $O(1/M)$. It also shows that
$O(1/M)$. It also shows that  $W_1<0$ in all cases, indicating that at late times, surfactant typically induces a reverse flow at the interface. However, at sufficiently large
$W_1<0$ in all cases, indicating that at late times, surfactant typically induces a reverse flow at the interface. However, at sufficiently large  $M$, the surface velocity is very small and so the interface is essentially immobilised as the layer approaches its late-time configuration. By immobilisation of the interface, we mean that there is no axial surface velocity, but the free surface can still deform and the layer thickness can still evolve.
$M$, the surface velocity is very small and so the interface is essentially immobilised as the layer approaches its late-time configuration. By immobilisation of the interface, we mean that there is no axial surface velocity, but the free surface can still deform and the layer thickness can still evolve.
3.3. Effect of varying the Marangoni number on stability and dynamics
To systematically assess the effect of surfactant on the stability and dynamics of the layer, we have run a large set of numerical simulations for various values of  $B$ and
$B$ and  $M$, with a fixed initial perturbation to the layer height,
$M$, with a fixed initial perturbation to the layer height,  $A=0.2$. Figure 5 shows the resulting data for the final peak height,
$A=0.2$. Figure 5 shows the resulting data for the final peak height,  $\max _zH(z,\tilde {t}=10^4)$, which have several characteristics of note.
$\max _zH(z,\tilde {t}=10^4)$, which have several characteristics of note.

Figure 5. Data from thin-film simulations with  $A=0.2$ and various
$A=0.2$ and various  $B$ and
$B$ and  $M$. Each coloured point corresponds to one simulation with the colour indicating the final peak height. Contours interpolated from the same data are also plotted in black, which are evenly spaced and in the range
$M$. Each coloured point corresponds to one simulation with the colour indicating the final peak height. Contours interpolated from the same data are also plotted in black, which are evenly spaced and in the range  $2.4\leq \max _zH\leq 2.8$. The red lines are
$2.4\leq \max _zH\leq 2.8$. The red lines are  $2M=BL$ (solid),
$2M=BL$ (solid),  $B=B_m(A=0.2)\approx 0.0289$ (dashed) and
$B=B_m(A=0.2)\approx 0.0289$ (dashed) and  $B=2B_m(A=0.2)\approx 0.0578$ (dash-dotted).
$B=2B_m(A=0.2)\approx 0.0578$ (dash-dotted).
There is a sharp stability boundary in the data in figure 5. There is a critical value of  $B$, which we call
$B$, which we call  $B_{c}$, such that for
$B_{c}$, such that for  $B< B_{c}$, there is instability and significant deformation of the layer, whilst for
$B< B_{c}$, there is instability and significant deformation of the layer, whilst for  $B>B_{c}$, there is minimal or no deformation. This stabilisation at high
$B>B_{c}$, there is minimal or no deformation. This stabilisation at high  $B$ was identified for the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), but it can be seen from figure 5 that
$B$ was identified for the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), but it can be seen from figure 5 that  $B_{c}$ also depends on
$B_{c}$ also depends on  $M$. For small
$M$. For small  $M$,
$M$,  $B_{c}$ recovers its value for the surfactant-free case but as
$B_{c}$ recovers its value for the surfactant-free case but as  $M$ is increased,
$M$ is increased,  $B_{c}$ decreases towards a different constant value at high
$B_{c}$ decreases towards a different constant value at high  $M$. It is evident that
$M$. It is evident that  $B_{c}$ also depends on the amplitude of the initial perturbation given to the layer,
$B_{c}$ also depends on the amplitude of the initial perturbation given to the layer,  $A$, as we discuss in detail in § 3.4 below. Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) showed that
$A$, as we discuss in detail in § 3.4 below. Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) showed that  $B_{c}$ can be predicted accurately for a large range of
$B_{c}$ can be predicted accurately for a large range of  $A$ using the marginally yielded static solutions,
$A$ using the marginally yielded static solutions,  $H_0(z;B)$. Here, we find that the same approach can be used to predict
$H_0(z;B)$. Here, we find that the same approach can be used to predict  $B_{c}$ for large
$B_{c}$ for large  $M$ as well as small
$M$ as well as small  $M$. If we define
$M$. If we define  $B_m(A)$ as the value of
$B_m(A)$ as the value of  $B$ such that the solution
$B$ such that the solution  $H_0$ to (3.2a) satisfies
$H_0$ to (3.2a) satisfies  $1-H_0(z=0;B)=A$, then we find
$1-H_0(z=0;B)=A$, then we find  $B_m(0.2)\approx 0.0289$ which can be seen in figure 5 to accurately predict
$B_m(0.2)\approx 0.0289$ which can be seen in figure 5 to accurately predict  $B_{c}$ at large
$B_{c}$ at large  $M$. To approximate the stability boundary at small
$M$. To approximate the stability boundary at small  $M$, we can use the prediction for the surfactant-free problem, which is simply
$M$, we can use the prediction for the surfactant-free problem, which is simply  $B_{c}\approx 2B_m\approx 0.0578$, since the function
$B_{c}\approx 2B_m\approx 0.0578$, since the function  $H_0$ is the same but the corresponding capillary Bingham number for that
$H_0$ is the same but the corresponding capillary Bingham number for that  $H_0$ is doubled. Figure 5 shows that this predicts the stability boundary well at small
$H_0$ is doubled. Figure 5 shows that this predicts the stability boundary well at small  $M$.
$M$.
To understand why the prediction for large  $M$ works, first note that in the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), the lower-branch static solutions from figure 4(a) correspond to the minimum amplitude of perturbation required to make the layer initially yield, as long as we now also have that
$M$ works, first note that in the surfactant-free problem (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), the lower-branch static solutions from figure 4(a) correspond to the minimum amplitude of perturbation required to make the layer initially yield, as long as we now also have that  $M\varGamma _z\approx B$. For large
$M\varGamma _z\approx B$. For large  $M$, surfactant is strong enough that a thin fully yielded region adjacent to the interface develops rapidly before any significant deformation of the layer occurs, so after a rapid adjustment from the initial conditions at early times, we do have
$M$, surfactant is strong enough that a thin fully yielded region adjacent to the interface develops rapidly before any significant deformation of the layer occurs, so after a rapid adjustment from the initial conditions at early times, we do have  $M\varGamma _z\approx B$ subsequently. Then, whether instability occurs depends only on whether the initial perturbation to the layer height, parametrised by
$M\varGamma _z\approx B$ subsequently. Then, whether instability occurs depends only on whether the initial perturbation to the layer height, parametrised by  $A$, was larger than the minimum required to yield, which is represented by the lower-branch static solution for a given
$A$, was larger than the minimum required to yield, which is represented by the lower-branch static solution for a given  $B$. Or, equivalently, if
$B$. Or, equivalently, if  $A$ is fixed as in figure 5, then instability occurs only if
$A$ is fixed as in figure 5, then instability occurs only if  $B< B_m(A)$.
$B< B_m(A)$.
In the limit of very strong surfactant, we can derive a simplified evolution equation by exploiting  $M\gg 1$ as a large parameter (see Appendix C). In this large-
$M\gg 1$ as a large parameter (see Appendix C). In this large- $M$ asymptotic theory, we find that the surface velocity is zero to leading order, so the interface is immobilised throughout the evolution. Additionally, we find that the motion is governed by the evolution equation,
$M$ asymptotic theory, we find that the surface velocity is zero to leading order, so the interface is immobilised throughout the evolution. Additionally, we find that the motion is governed by the evolution equation,
 \begin{equation} H_{\tilde{t}} + \left[\frac{1}{6}\tilde{p}_z\tilde{Y}^2(2\tilde{Y}-3H)\right]_z=0, \quad\mbox{where}\ \tilde{Y} = \max\left(0,\frac{1}{2}H-\frac{B}{|\tilde{p}_z|}\right). \end{equation}
\begin{equation} H_{\tilde{t}} + \left[\frac{1}{6}\tilde{p}_z\tilde{Y}^2(2\tilde{Y}-3H)\right]_z=0, \quad\mbox{where}\ \tilde{Y} = \max\left(0,\frac{1}{2}H-\frac{B}{|\tilde{p}_z|}\right). \end{equation}
If we replace  $B$ with
$B$ with  $\tfrac {1}{2}B$ and
$\tfrac {1}{2}B$ and  $\tilde {t}$ with
$\tilde {t}$ with  $\tfrac {1}{4}\tilde {t}$ in (3.9), then we exactly recover the evolution equation for the surfactant-free problem ((2.27) of Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Therefore, solutions for the dynamics with very strong surfactant are the same as solutions for the dynamics without surfactant, but with the capillary Bingham number doubled and time slowed by a factor of four. The four-fold increase in the time scale has been established previously for Newtonian fluids (Otis et al. Reference Otis, Johnson, Pedley and Kamm1993), but the effective doubling of the yield stress by strong surfactant is (we believe) a new phenomenon. We have already seen this doubling of
$\tfrac {1}{4}\tilde {t}$ in (3.9), then we exactly recover the evolution equation for the surfactant-free problem ((2.27) of Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Therefore, solutions for the dynamics with very strong surfactant are the same as solutions for the dynamics without surfactant, but with the capillary Bingham number doubled and time slowed by a factor of four. The four-fold increase in the time scale has been established previously for Newtonian fluids (Otis et al. Reference Otis, Johnson, Pedley and Kamm1993), but the effective doubling of the yield stress by strong surfactant is (we believe) a new phenomenon. We have already seen this doubling of  $B$ in relation to the final shape of the layer in (3.2a) and in the value for
$B$ in relation to the final shape of the layer in (3.2a) and in the value for  $B_c$ in figure 5, as described above. However, this theory indicates that for
$B_c$ in figure 5, as described above. However, this theory indicates that for  $M\gg 1$, the doubling of
$M\gg 1$, the doubling of  $B$ holds for the entire dynamics, except for a very short period with time scale
$B$ holds for the entire dynamics, except for a very short period with time scale  $O(1/M)$ at the beginning of the evolution when the initially uniform surfactant profile rapidly adjusts to a configuration consistent with the asymptotic theory.
$O(1/M)$ at the beginning of the evolution when the initially uniform surfactant profile rapidly adjusts to a configuration consistent with the asymptotic theory.
Figure 5 also indicates that, within the unstable region of parameter space, i.e.  $B< B_{c}$, there are two qualitatively different behaviours. At sufficiently large
$B< B_{c}$, there are two qualitatively different behaviours. At sufficiently large  $M$, there is a region where the final peak height is effectively independent of
$M$, there is a region where the final peak height is effectively independent of  $M$. These are the simulations which obey the late-time behaviour described in § 3.2, and so their final shape is the marginally yielded static shape
$M$. These are the simulations which obey the late-time behaviour described in § 3.2, and so their final shape is the marginally yielded static shape  $H_0$, a solution to (3.2a), which has no
$H_0$, a solution to (3.2a), which has no  $M$-dependence. In contrast, for sufficiently small
$M$-dependence. In contrast, for sufficiently small  $M$, not all of the fluid adjacent to the interface fully yields at late times, and so the layer does not enter the late-time regime described in § 3.2 but instead approaches a different final static shape. It can be seen in figure 5 that for small
$M$, not all of the fluid adjacent to the interface fully yields at late times, and so the layer does not enter the late-time regime described in § 3.2 but instead approaches a different final static shape. It can be seen in figure 5 that for small  $M$, the final peak height and, hence, the final shape, depend on both
$M$, the final peak height and, hence, the final shape, depend on both  $M$ and
$M$ and  $B$. These results are consistent with the observation that the late-time solution (3.2) exists only for
$B$. These results are consistent with the observation that the late-time solution (3.2) exists only for  $2M\geq BL$: figure 5 shows there is
$2M\geq BL$: figure 5 shows there is  $M$-dependence in the final layer shape when
$M$-dependence in the final layer shape when  $2M< BL$. There is, however, also a small band of parameter values in figure 5 where there is still
$2M< BL$. There is, however, also a small band of parameter values in figure 5 where there is still  $M$-dependence in the final shape despite
$M$-dependence in the final shape despite  $2M\geq BL$. Although our results suggest that the final shape of the layer in these cases does depend on
$2M\geq BL$. Although our results suggest that the final shape of the layer in these cases does depend on  $M$, we cannot rule out the possibility that if simulations were run to much longer times, some of these simulations may eventually approach the
$M$, we cannot rule out the possibility that if simulations were run to much longer times, some of these simulations may eventually approach the  $M$-independent final shape,
$M$-independent final shape,  $H_0$.
$H_0$.
Figure 6 shows an example numerical simulation in this small  $M$ region. In this simulation, there is a region near
$M$ region. In this simulation, there is a region near  $z=0$ that exhibits yielding of type II throughout the evolution, even at late times, so there is only partial yielding adjacent to the interface. For this simulation,
$z=0$ that exhibits yielding of type II throughout the evolution, even at late times, so there is only partial yielding adjacent to the interface. For this simulation,  $B=0.04$ and
$B=0.04$ and  $M=0.08$, so
$M=0.08$, so  $2M< B L$. This means that the layer cannot enter the late-time regime described in § 3.2, as then (3.2b) would require
$2M< B L$. This means that the layer cannot enter the late-time regime described in § 3.2, as then (3.2b) would require  $\varGamma$ to be negative. In figure 5, the boundary between the region with complete surface yielding (simulations that enter the late-time regime from § 3.2) and the small
$\varGamma$ to be negative. In figure 5, the boundary between the region with complete surface yielding (simulations that enter the late-time regime from § 3.2) and the small  $M$ region with no or partial surface yielding occurs close to the line
$M$ region with no or partial surface yielding occurs close to the line  $2M=B L$. Physically, we can interpret the behaviour at small
$2M=B L$. Physically, we can interpret the behaviour at small  $M$ as the surfactant being too weak for Marangoni effects to be able to fully yield the whole interface. In figure 6, a large portion of the domain does exhibit interface-adjacent yielding, but if
$M$ as the surfactant being too weak for Marangoni effects to be able to fully yield the whole interface. In figure 6, a large portion of the domain does exhibit interface-adjacent yielding, but if  $M$ was decreased further, this portion would become smaller and eventually as
$M$ was decreased further, this portion would become smaller and eventually as  $M\rightarrow 0$, no fully yielded region would exist near the interface, consistent with the behaviour in the surfactant-free case. We note that at late times in the simulation in figure 6, there is complex behaviour near
$M\rightarrow 0$, no fully yielded region would exist near the interface, consistent with the behaviour in the surfactant-free case. We note that at late times in the simulation in figure 6, there is complex behaviour near  $z=0$ with a small region developing where
$z=0$ with a small region developing where  $\tilde {p}_z$ changes sign. We find this type of behaviour to be typical in simulations with very small
$\tilde {p}_z$ changes sign. We find this type of behaviour to be typical in simulations with very small  $M$, but since it occurs at late times when the layer is already near-static, it generally has minimal impact on the global dynamics. Finally, figure 5 demonstrates that surfactant has an appreciable impact on the final configuration of the thin film for
$M$, but since it occurs at late times when the layer is already near-static, it generally has minimal impact on the global dynamics. Finally, figure 5 demonstrates that surfactant has an appreciable impact on the final configuration of the thin film for  $M=O(1)$, corresponding (from (2.38)) to a negligible (
$M=O(1)$, corresponding (from (2.38)) to a negligible ( $O(\epsilon ^2)$) reduction in surface tension relative to its mean value. In this thin-film limit, surfactant operates solely through powerful Marangoni effects.
$O(\epsilon ^2)$) reduction in surface tension relative to its mean value. In this thin-film limit, surfactant operates solely through powerful Marangoni effects.

Figure 6. Snapshots from a thin-film simulation with  $B=0.04$,
$B=0.04$,  $M=0.08$,
$M=0.08$,  $A=0.2$, at
$A=0.2$, at  $\tilde {t}=\{70,120,1100,9000\}$. The upper row of panels shows the layer height evolving, with
$\tilde {t}=\{70,120,1100,9000\}$. The upper row of panels shows the layer height evolving, with  $Y_-$ (cyan) and
$Y_-$ (cyan) and  $Y_+$ (red), and the thin-film axial velocity,
$Y_+$ (red), and the thin-film axial velocity,  $\tilde {w}$, represented by the colour map; the middle row shows
$\tilde {w}$, represented by the colour map; the middle row shows  $\varGamma$ (green),
$\varGamma$ (green),  $\varGamma _z$ (blue) and
$\varGamma _z$ (blue) and  $\tilde {p}_z$ (magenta); and the lower row shows shows the solution in
$\tilde {p}_z$ (magenta); and the lower row shows shows the solution in  $(H\tilde {p}_z/B,M\varGamma _z/B)$-space, with the black dots corresponding to evenly spaced points along
$(H\tilde {p}_z/B,M\varGamma _z/B)$-space, with the black dots corresponding to evenly spaced points along  $0< z< L$ and the arrows indicating the direction of increasing
$0< z< L$ and the arrows indicating the direction of increasing  $z$. Red diamonds in the first and third panels mark the boundaries of the region where there is yielding at the interface.
$z$. Red diamonds in the first and third panels mark the boundaries of the region where there is yielding at the interface.
3.4. Dependence on the amplitude of initial perturbation
When  $B>0$, the instability is nonlinear and the dynamics of the layer, including its final shape, have some dependence on the size of initial perturbation to the free surface,
$B>0$, the instability is nonlinear and the dynamics of the layer, including its final shape, have some dependence on the size of initial perturbation to the free surface,  $A$. For the surfactant-free problem, Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) showed that the late-time static solutions (solutions to (3.2a) but with
$A$. For the surfactant-free problem, Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) showed that the late-time static solutions (solutions to (3.2a) but with  $2B$ replaced by
$2B$ replaced by  $B$) can be used both to predict the minimum
$B$) can be used both to predict the minimum  $A$ required to trigger instability, referred to as
$A$ required to trigger instability, referred to as  $A_c(B)$, and to identify a large region of parameter space where the final shape is independent of
$A_c(B)$, and to identify a large region of parameter space where the final shape is independent of  $A$. Figure 7(a) illustrates how, in the surfactant-free case, the curve
$A$. Figure 7(a) illustrates how, in the surfactant-free case, the curve  $B = 2B_m(A)$ approximates closely the boundary of the region in
$B = 2B_m(A)$ approximates closely the boundary of the region in  $(B,A)$-space where
$(B,A)$-space where  $\max _zH(z,t=10^4)$ is independent of
$\max _zH(z,t=10^4)$ is independent of  $A$. This boundary includes the sharp stability boundary separating simulations where minimal or no growth occurred from the simulations where there is significant growth. As above,
$A$. This boundary includes the sharp stability boundary separating simulations where minimal or no growth occurred from the simulations where there is significant growth. As above,  $B_m(A)$ is defined as the value of
$B_m(A)$ is defined as the value of  $B$ such that
$B$ such that  $1-H_0(z=0;B) = A$, where
$1-H_0(z=0;B) = A$, where  $H_0$ are solutions to (3.2a).
$H_0$ are solutions to (3.2a).

Figure 7. Data from thin-film numerical simulations with (a)  $M=0$, (b)
$M=0$, (b)  $M=0.6$ and (c)
$M=0.6$ and (c)  $M=6$. Each coloured dot corresponds to one simulation, with the given values of
$M=6$. Each coloured dot corresponds to one simulation, with the given values of  $A$ and
$A$ and  $B$, where the colour indicates the final maximum height of the layer. The same data for
$B$, where the colour indicates the final maximum height of the layer. The same data for  $\max _zH(z,t=10^4)$ are linearly interpolated and plotted as black contour lines. The two magenta curves in each panel are
$\max _zH(z,t=10^4)$ are linearly interpolated and plotted as black contour lines. The two magenta curves in each panel are  $B=B_m(A)$ (solid) and
$B=B_m(A)$ (solid) and  $B=2B_m(A)$ (dash-dotted).
$B=2B_m(A)$ (dash-dotted).
Figure 7(b,c) show how introducing surfactant alters this  $A$-dependence, particularly how
$A$-dependence, particularly how  $A_c$ is increased for larger values of
$A_c$ is increased for larger values of  $M$. For
$M$. For  $M=0.6$ (figure 7b),
$M=0.6$ (figure 7b),  $A_c$ is increased for each value of
$A_c$ is increased for each value of  $B$ compared with the surfactant-free case. When surfactant strength is increased again to
$B$ compared with the surfactant-free case. When surfactant strength is increased again to  $M=6$ (figure 7c),
$M=6$ (figure 7c),  $A_c$ is further increased and, analogously to the surfactant-free case, the curve
$A_c$ is further increased and, analogously to the surfactant-free case, the curve  $B=B_m(A)$ predicts the entire boundary of the region where the final shape is independent of
$B=B_m(A)$ predicts the entire boundary of the region where the final shape is independent of  $A$, including predicting
$A$, including predicting  $A_c$. The lower branch of static solutions in figure 4(a) correspond to the values of
$A_c$. The lower branch of static solutions in figure 4(a) correspond to the values of  $B_m$ that predict
$B_m$ that predict  $A_c$ in figure 7(c), illustrating that these lower-branch solutions correspond to the minimal initial perturbation to the free surface required to trigger instability when surfactant is strong. The accuracy of
$A_c$ in figure 7(c), illustrating that these lower-branch solutions correspond to the minimal initial perturbation to the free surface required to trigger instability when surfactant is strong. The accuracy of  $B=B_m(A)$ in predicting the whole boundary of the
$B=B_m(A)$ in predicting the whole boundary of the  $A$-independent region in figure 7(c) provides further evidence of the effective doubling of
$A$-independent region in figure 7(c) provides further evidence of the effective doubling of  $B$ by introducing strong surfactant compared with the surfactant-free case, and highlights that the static solutions,
$B$ by introducing strong surfactant compared with the surfactant-free case, and highlights that the static solutions,  $H_0(z;B)$, can provide significant insight into the stability and dynamics of a layer with strong surfactant. Figure 7 also illustrates that, while there is non-trivial dependence of
$H_0(z;B)$, can provide significant insight into the stability and dynamics of a layer with strong surfactant. Figure 7 also illustrates that, while there is non-trivial dependence of  $A_c$ on
$A_c$ on  $M$, accurate upper and lower bounds for
$M$, accurate upper and lower bounds for  $A_c$ for any
$A_c$ for any  $M$ are provided by the curves
$M$ are provided by the curves  $B=B_m(A)$ and
$B=B_m(A)$ and  $B=2B_m(A)$, respectively.
$B=2B_m(A)$, respectively.
4. Thick films and liquid plug formation
Whilst the relative simplicity of the thin-film equations allows for more detailed analysis, liquid plug formation cannot occur in that theory. To assess the effect of surfactant on the dynamics leading to plug formation, we now consider the long-wave equations (2.27)–(2.33), which model the evolution of layers which are not thin. The layer thickness is described by the parameter  $\epsilon$, which is the ratio of the average thickness to the tube radius after a small adjustment to account for the change in volume induced by having a finite amplitude initial perturbation (see (2.48)).
$\epsilon$, which is the ratio of the average thickness to the tube radius after a small adjustment to account for the change in volume induced by having a finite amplitude initial perturbation (see (2.48)).
The minimum volume of fluid required to form a liquid plug corresponds to a layer thickness of  $\epsilon \approx 0.107$ for the length of domain we are using (Everett & Haynes Reference Everett and Haynes1972). Gauglitz & Radke (Reference Gauglitz and Radke1988) conducted the first numerical simulations of the Newtonian problem without surfactant, which predicted a slightly larger critical thickness,
$\epsilon \approx 0.107$ for the length of domain we are using (Everett & Haynes Reference Everett and Haynes1972). Gauglitz & Radke (Reference Gauglitz and Radke1988) conducted the first numerical simulations of the Newtonian problem without surfactant, which predicted a slightly larger critical thickness,  $\epsilon _{crit}\approx 0.12$, due in part to the restriction of only being able to run simulations to a relatively short, finite time. Viscoplastic rheology can significantly increase
$\epsilon _{crit}\approx 0.12$, due in part to the restriction of only being able to run simulations to a relatively short, finite time. Viscoplastic rheology can significantly increase  $\epsilon _{crit}$ when the capillary Bingham number is sufficiently high (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Here, we investigate how
$\epsilon _{crit}$ when the capillary Bingham number is sufficiently high (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Here, we investigate how  $\epsilon _{crit}$ is affected by the additional presence of surfactant.
$\epsilon _{crit}$ is affected by the additional presence of surfactant.
We run all simulations to time  $\tilde {t}=10^4$, which is an order of magnitude longer than in the investigation by Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), to capture the dynamics around plug formation as accurately as possible. Following the approach of many previous studies, we stop the simulations early if
$\tilde {t}=10^4$, which is an order of magnitude longer than in the investigation by Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), to capture the dynamics around plug formation as accurately as possible. Following the approach of many previous studies, we stop the simulations early if  $\min _zR \leq 0.3$, or equivalently if
$\min _zR \leq 0.3$, or equivalently if  $\max _zH\geq 0.7/\epsilon$, as this has been found to indicate that a plug is imminently about to form (Halpern & Grotberg Reference Halpern and Grotberg1992, Reference Halpern and Grotberg1993; Halpern et al. Reference Halpern, Fujioka and Grotberg2010; Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). We then identify the time at which the simulation is stopped as the plugging time,
$\max _zH\geq 0.7/\epsilon$, as this has been found to indicate that a plug is imminently about to form (Halpern & Grotberg Reference Halpern and Grotberg1992, Reference Halpern and Grotberg1993; Halpern et al. Reference Halpern, Fujioka and Grotberg2010; Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). We then identify the time at which the simulation is stopped as the plugging time,  $t_p$. We will describe the thick-film results in this section using the unscaled capillary Bingham and Marangoni numbers,
$t_p$. We will describe the thick-film results in this section using the unscaled capillary Bingham and Marangoni numbers,  $\operatorname {\mathcal {B}}$ and
$\operatorname {\mathcal {B}}$ and  $\operatorname {\mathcal {M}}$, defined in the long-wave theory (2.38), rather than the scaled versions that arise in the thin-film theory. One can convert back to the scaled, thin-film parameters by dividing
$\operatorname {\mathcal {M}}$, defined in the long-wave theory (2.38), rather than the scaled versions that arise in the thin-film theory. One can convert back to the scaled, thin-film parameters by dividing  $\operatorname {\mathcal {B}}$ and
$\operatorname {\mathcal {B}}$ and  $\operatorname {\mathcal {M}}$ by
$\operatorname {\mathcal {M}}$ by  $\epsilon ^{2}$.
$\epsilon ^{2}$.
4.1. Example evolution showing plug formation
Figure 8(a) shows a numerical solution of the long-wave equations. The layer thickness is  $\epsilon =0.14$, meaning that there is sufficient volume of fluid that a plug could form, and it can be seen in figure 8(b) that one does form at around
$\epsilon =0.14$, meaning that there is sufficient volume of fluid that a plug could form, and it can be seen in figure 8(b) that one does form at around  $\tilde {t}\approx 268$. Around
$\tilde {t}\approx 268$. Around  $267\lesssim \tilde {t}\lesssim 268$, the layer grows rapidly towards the centre of the tube, indicating that it is about to form a plug when the simulation is stopped. Introducing surfactant to a Newtonian layer with comparable thickness has been shown to increase the plugging time approximately four-fold (Ogrosky Reference Ogrosky2021). We find that adding surfactant to a viscoplastic layer can increase the plugging time by a much greater amount. In the example shown in figure 8(b), plug formation in the surfactant-laden viscoplastic film takes approximately eight times longer than when there is no surfactant, which in itself takes longer than plugging in the surfactant-free Newtonian simulation.
$267\lesssim \tilde {t}\lesssim 268$, the layer grows rapidly towards the centre of the tube, indicating that it is about to form a plug when the simulation is stopped. Introducing surfactant to a Newtonian layer with comparable thickness has been shown to increase the plugging time approximately four-fold (Ogrosky Reference Ogrosky2021). We find that adding surfactant to a viscoplastic layer can increase the plugging time by a much greater amount. In the example shown in figure 8(b), plug formation in the surfactant-laden viscoplastic film takes approximately eight times longer than when there is no surfactant, which in itself takes longer than plugging in the surfactant-free Newtonian simulation.

Figure 8. (a) Numerical solution of the long-wave equations (2.25)–(2.33) with  $A=0.2$,
$A=0.2$,  $\operatorname {\mathcal {B}}=0.001$,
$\operatorname {\mathcal {B}}=0.001$,  $\mathcal {M}=0.02$ and
$\mathcal {M}=0.02$ and  $\epsilon =0.14$, showing the transition towards plug formation. The upper row shows the evolution of the layer height, with
$\epsilon =0.14$, showing the transition towards plug formation. The upper row shows the evolution of the layer height, with  $Y_-$ (cyan) and
$Y_-$ (cyan) and  $Y_+$ (red) also shown, and the colour corresponding to the magnitude of the axial velocity,
$Y_+$ (red) also shown, and the colour corresponding to the magnitude of the axial velocity,  $|w|$. The lower row shows
$|w|$. The lower row shows  $p_z$ (magenta),
$p_z$ (magenta),  $\varGamma _z$ (blue) and
$\varGamma _z$ (blue) and  $\varGamma$ (green). (b) Time evolution of
$\varGamma$ (green). (b) Time evolution of  $\max _zH$ for the same simulation, compared with
$\max _zH$ for the same simulation, compared with  $\max _zH$ from simulations with
$\max _zH$ from simulations with  $(\operatorname {\mathcal {B}},\operatorname {\mathcal {M}})=\{(0,0),(0.001,0),(0,0.02),(0.001,0.02)\}$, showing the combined delay to plug formation by surfactant and yield stress.
$(\operatorname {\mathcal {B}},\operatorname {\mathcal {M}})=\{(0,0),(0.001,0),(0,0.02),(0.001,0.02)\}$, showing the combined delay to plug formation by surfactant and yield stress.
Figure 8(a) shows that by  $\tilde {t}=190$, the layer is exhibiting yielding of type I everywhere, similar to the typical thin-film behaviour seen in figure 3(a). However, at later times, a region with type IV yielding, where the fluid is yielded near the interface but rigid adjacent to the wall, appears near
$\tilde {t}=190$, the layer is exhibiting yielding of type I everywhere, similar to the typical thin-film behaviour seen in figure 3(a). However, at later times, a region with type IV yielding, where the fluid is yielded near the interface but rigid adjacent to the wall, appears near  $z=0$ and then expands towards the centre of the domain. The flow in this region is in the negative
$z=0$ and then expands towards the centre of the domain. The flow in this region is in the negative  $z$-direction, opposing the flow in the rest of the layer. However, the velocity in this region is small so we expect any effect on the global dynamics to be minimal. This behaviour is similar to what is observed in the long-wave problem without surfactant, but in that case, the region near
$z$-direction, opposing the flow in the rest of the layer. However, the velocity in this region is small so we expect any effect on the global dynamics to be minimal. This behaviour is similar to what is observed in the long-wave problem without surfactant, but in that case, the region near  $z=0$ is fully rigid (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Whilst we expect this long-wave theory to be a good approximation to the overall dynamics of the thick film, small details such as this behaviour near
$z=0$ is fully rigid (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). Whilst we expect this long-wave theory to be a good approximation to the overall dynamics of the thick film, small details such as this behaviour near  $z=0$ would need to be confirmed with full two-dimensional simulations. The more profound effect of surfactant that can be seen in figure 8(a) is the development of a sizeable fully yielded region near the interface all along the layer, where the shear is opposing the general flow and so delaying the formation of a plug.
$z=0$ would need to be confirmed with full two-dimensional simulations. The more profound effect of surfactant that can be seen in figure 8(a) is the development of a sizeable fully yielded region near the interface all along the layer, where the shear is opposing the general flow and so delaying the formation of a plug.
4.2. Thick-film dynamics at large Marangoni numbers
To explore the effect of increasing the surfactant strength on the evolution of a thick film, we propose an expansion for  $\operatorname {\mathcal {M}}\gg 1$,
$\operatorname {\mathcal {M}}\gg 1$,
 \begin{align} R = \mathcal{R}_0 + \frac{1}{\operatorname{\mathcal{M}}}\mathcal{R}_1+\cdots,\quad \varGamma = \mathcal{G}_0 + \frac{1}{\operatorname{\mathcal{M}}}\mathcal{G}_1+\cdots,\quad w_s = \mathcal{W}_0 + \frac{1}{\operatorname{\mathcal{M}}}\mathcal{W}_1+\cdots. \end{align}
\begin{align} R = \mathcal{R}_0 + \frac{1}{\operatorname{\mathcal{M}}}\mathcal{R}_1+\cdots,\quad \varGamma = \mathcal{G}_0 + \frac{1}{\operatorname{\mathcal{M}}}\mathcal{G}_1+\cdots,\quad w_s = \mathcal{W}_0 + \frac{1}{\operatorname{\mathcal{M}}}\mathcal{W}_1+\cdots. \end{align}
Since the surface stress must be finite,  $|\partial _z\sigma |=|\operatorname {\mathcal {M}}\partial _z\varGamma |<\infty$, we must have
$|\partial _z\sigma |=|\operatorname {\mathcal {M}}\partial _z\varGamma |<\infty$, we must have  $\partial _z\mathcal {G}_0=0$. Conservation of the total amount of surfactant in the long-wave theory then implies
$\partial _z\mathcal {G}_0=0$. Conservation of the total amount of surfactant in the long-wave theory then implies
 \begin{equation} \mathcal{G}_0(t) = \frac{\int_0^L\mathcal{R}_0|_{t=0}\,\mathrm{d}z}{\int_0^L\mathcal{R}_0\,\mathrm{d}z}. \end{equation}
\begin{equation} \mathcal{G}_0(t) = \frac{\int_0^L\mathcal{R}_0|_{t=0}\,\mathrm{d}z}{\int_0^L\mathcal{R}_0\,\mathrm{d}z}. \end{equation}
The surfactant transport equation (2.30) at leading order in  $\operatorname {\mathcal {M}}$, after rearranging and using (4.2), gives
$\operatorname {\mathcal {M}}$, after rearranging and using (4.2), gives
 \begin{equation} \mathcal{W}_0(z,t) = \frac{1}{\mathcal{R}_0}\int_0^z\mathcal{I}(\zeta,t)\,\mathrm{d}\zeta,\quad\mbox{where}\ \mathcal{I} = \frac{\mathcal{R}_0\int_0^L\partial_t\mathcal{R}_{0}\,\mathrm{d}z-\partial_t\mathcal{R}_{0}\int_0^L\mathcal{R}_0\,\mathrm{d}z}{\int_0^L\mathcal{R}_0\,\mathrm{d}z}. \end{equation}
\begin{equation} \mathcal{W}_0(z,t) = \frac{1}{\mathcal{R}_0}\int_0^z\mathcal{I}(\zeta,t)\,\mathrm{d}\zeta,\quad\mbox{where}\ \mathcal{I} = \frac{\mathcal{R}_0\int_0^L\partial_t\mathcal{R}_{0}\,\mathrm{d}z-\partial_t\mathcal{R}_{0}\int_0^L\mathcal{R}_0\,\mathrm{d}z}{\int_0^L\mathcal{R}_0\,\mathrm{d}z}. \end{equation}
Therefore, unlike for the thin-film case (Appendix C), the surface velocity is not zero for large  $\operatorname {\mathcal {M}}$, in general. From (4.3), the surface velocity can be deduced from the difference between the local time derivative of the film thickness,
$\operatorname {\mathcal {M}}$, in general. From (4.3), the surface velocity can be deduced from the difference between the local time derivative of the film thickness,  $\partial _t\mathcal {R}_0$, and the globally averaged rate of change of the thickness, via the integral of
$\partial _t\mathcal {R}_0$, and the globally averaged rate of change of the thickness, via the integral of  $\partial _t\mathcal {R}_0$. Non-zero
$\partial _t\mathcal {R}_0$. Non-zero  $\mathcal {W}_0$ leads to small gradients in surfactant concentration. The results (4.2) and (4.3) can be understood physically as follows: the surfactant is so strong that any local change in the shape of the interface induces a surface velocity that redistributes surfactant so that the concentration remains (almost) globally uniform, and if the total surface area of the interface has changed, this will also induce a change in the mean concentration. We have appealed neither to the equation of state for surface tension (2.19), except that
$\mathcal {W}_0$ leads to small gradients in surfactant concentration. The results (4.2) and (4.3) can be understood physically as follows: the surfactant is so strong that any local change in the shape of the interface induces a surface velocity that redistributes surfactant so that the concentration remains (almost) globally uniform, and if the total surface area of the interface has changed, this will also induce a change in the mean concentration. We have appealed neither to the equation of state for surface tension (2.19), except that  $\sigma '(\varGamma )\neq 0$, nor to the liquid's rheology to reach (4.2) and (4.3). Hence, within long-wave theory, the results (4.2) and (4.3) are generic for any type of fluid and any equation of state that has
$\sigma '(\varGamma )\neq 0$, nor to the liquid's rheology to reach (4.2) and (4.3). Hence, within long-wave theory, the results (4.2) and (4.3) are generic for any type of fluid and any equation of state that has  $\sigma '(\varGamma )\neq 0$.
$\sigma '(\varGamma )\neq 0$.
Figure 9 compares a solution of the full long-wave system (2.27)–(2.33) with  $\operatorname {\mathcal {M}}=10$ with the results (4.2) and (4.3). It shows good agreement between
$\operatorname {\mathcal {M}}=10$ with the results (4.2) and (4.3). It shows good agreement between  $\varGamma$ and
$\varGamma$ and  $w_s$ from the numerical solutions and the leading-order approximations (4.2) and (4.3), despite the value of
$w_s$ from the numerical solutions and the leading-order approximations (4.2) and (4.3), despite the value of  $\mathcal {M}$ not being extremely large. The spatial gradients in
$\mathcal {M}$ not being extremely large. The spatial gradients in  $\varGamma$ (figure 9b) are small in the numerical solution, and we expect these would become smaller if the surfactant strength was further increased, in line with the large-
$\varGamma$ (figure 9b) are small in the numerical solution, and we expect these would become smaller if the surfactant strength was further increased, in line with the large- $\operatorname {\mathcal {M}}$ theory. Figure 9(c) shows that the surface velocity induced as plug formation occurs is in the negative
$\operatorname {\mathcal {M}}$ theory. Figure 9(c) shows that the surface velocity induced as plug formation occurs is in the negative  $z$-direction, and is strongest immediately before the simulation is stopped. This is because there is a rapid decrease in the local surface area of the interface near
$z$-direction, and is strongest immediately before the simulation is stopped. This is because there is a rapid decrease in the local surface area of the interface near  $z=L$ during the fast growth before plug formation, which induces a surface velocity to redistribute surfactant across the layer.
$z=L$ during the fast growth before plug formation, which induces a surface velocity to redistribute surfactant across the layer.

Figure 9. Results from a numerical solution of the long-wave equations with  $\epsilon =0.14$,
$\epsilon =0.14$,  $\operatorname {\mathcal {M}}=10$,
$\operatorname {\mathcal {M}}=10$,  $\operatorname {\mathcal {B}}=0.001$ and
$\operatorname {\mathcal {B}}=0.001$ and  $A=0.25$. (a) The interface position,
$A=0.25$. (a) The interface position,  $R$, shown at various time points. The last time point is
$R$, shown at various time points. The last time point is  $\tilde {t}=t_p=410.69$, when the simulation is stopped. (b) Surfactant concentration,
$\tilde {t}=t_p=410.69$, when the simulation is stopped. (b) Surfactant concentration,  $\varGamma$ (solid), at the same time points as in panel (a). These are compared with
$\varGamma$ (solid), at the same time points as in panel (a). These are compared with  $\mathcal {G}_0(t)$ (dashed), the approximation from the large-
$\mathcal {G}_0(t)$ (dashed), the approximation from the large- $\operatorname {\mathcal {M}}$ asymptotic theory, which is evaluated via (4.2) using the numerical solutions from panel (a) as proxies for
$\operatorname {\mathcal {M}}$ asymptotic theory, which is evaluated via (4.2) using the numerical solutions from panel (a) as proxies for  $\mathcal {R}_0$. (c) Surface velocity,
$\mathcal {R}_0$. (c) Surface velocity,  $w_s$ (solid), at the same time points. These are also compared with the corresponding approximation from the large-
$w_s$ (solid), at the same time points. These are also compared with the corresponding approximation from the large- $\operatorname {\mathcal {M}}$ theory (4.3).
$\operatorname {\mathcal {M}}$ theory (4.3).
The results from figure 9 suggest that the large- $\operatorname {\mathcal {M}}$ theory can be used to better understand the behaviour of thick films when surfactant is strong. However, we have assumed a simple linear equation of state for surface tension (2.19), which limits how large we are able to make
$\operatorname {\mathcal {M}}$ theory can be used to better understand the behaviour of thick films when surfactant is strong. However, we have assumed a simple linear equation of state for surface tension (2.19), which limits how large we are able to make  $\operatorname {\mathcal {M}}$ in simulations while retaining accuracy. Figure 9(b) suggests that when the simulation is stopped, the increase in
$\operatorname {\mathcal {M}}$ in simulations while retaining accuracy. Figure 9(b) suggests that when the simulation is stopped, the increase in  $\varGamma$ from its original value was approximately
$\varGamma$ from its original value was approximately  $3\,\%$. We have found that this is approximately independent of
$3\,\%$. We have found that this is approximately independent of  $\operatorname {\mathcal {M}}$, so for values of
$\operatorname {\mathcal {M}}$, so for values of  $\operatorname {\mathcal {M}}$ close to or larger than
$\operatorname {\mathcal {M}}$ close to or larger than  $\operatorname {\mathcal {M}}\approx 30$, we expect the theory to break down since
$\operatorname {\mathcal {M}}\approx 30$, we expect the theory to break down since  $\sigma$ will approach zero as a plug forms. For this reason,
$\sigma$ will approach zero as a plug forms. For this reason,  $\operatorname {\mathcal {M}}=10$ is the largest Marangoni that we have used in the long-wave simulations. A more complex nonlinear equation of state would have to be used to access higher values accurately.
$\operatorname {\mathcal {M}}=10$ is the largest Marangoni that we have used in the long-wave simulations. A more complex nonlinear equation of state would have to be used to access higher values accurately.
4.3. Critical layer thickness for plug formation
Figure 10(a) compares the computed critical layer thickness for plug formation to occur,  $\epsilon _{crit}$, when surfactant is present with its value when the interface is clean. Both with and without surfactant, increasing
$\epsilon _{crit}$, when surfactant is present with its value when the interface is clean. Both with and without surfactant, increasing  $\operatorname {\mathcal {B}}$ induces an increase in
$\operatorname {\mathcal {B}}$ induces an increase in  $\epsilon _{crit}$. The increase is small when
$\epsilon _{crit}$. The increase is small when  $\operatorname {\mathcal {B}}$ is small, but is significant at larger
$\operatorname {\mathcal {B}}$ is small, but is significant at larger  $\operatorname {\mathcal {B}}$. When surfactant is present, the increase in
$\operatorname {\mathcal {B}}$. When surfactant is present, the increase in  $\epsilon _{crit}$ is initiated at
$\epsilon _{crit}$ is initiated at  $\operatorname {\mathcal {B}}\approx 10^{-3}$, compared with at
$\operatorname {\mathcal {B}}\approx 10^{-3}$, compared with at  $\operatorname {\mathcal {B}}\approx 2\times 10^{-3}$ when the interface is clean. Beyond these values of
$\operatorname {\mathcal {B}}\approx 2\times 10^{-3}$ when the interface is clean. Beyond these values of  $\operatorname {\mathcal {B}}$, the increase is amplified by the presence of surfactant, such that the value of
$\operatorname {\mathcal {B}}$, the increase is amplified by the presence of surfactant, such that the value of  $\epsilon _{crit}$ is approximately
$\epsilon _{crit}$ is approximately  $30\,\%$ larger than when the interface is clean.
$30\,\%$ larger than when the interface is clean.

Figure 10. (a) Critical layer thickness,  $\epsilon _{crit}$, as a function of
$\epsilon _{crit}$, as a function of  $\mathcal {B}$, for a surfactant-free layer (
$\mathcal {B}$, for a surfactant-free layer ( $\mathcal {M}=0$) and a layer with surfactant (
$\mathcal {M}=0$) and a layer with surfactant ( $\mathcal {M}=0.4$). All simulations have
$\mathcal {M}=0.4$). All simulations have  $A=0.25$. The value of
$A=0.25$. The value of  $\epsilon _{crit}$ computed is such that a simulation with
$\epsilon _{crit}$ computed is such that a simulation with  $\epsilon =\epsilon _{crit}+0.001$ forms a plug before
$\epsilon =\epsilon _{crit}+0.001$ forms a plug before  $\tilde {t}=10^4$ and a simulation with
$\tilde {t}=10^4$ and a simulation with  $\epsilon =\epsilon _{crit}-0.001$ has not formed a plug by
$\epsilon =\epsilon _{crit}-0.001$ has not formed a plug by  $\tilde {t}=10^4$. (b) Data from long-wave simulations at various values of
$\tilde {t}=10^4$. (b) Data from long-wave simulations at various values of  $\epsilon$ and
$\epsilon$ and  $\operatorname {\mathcal {M}}$, with
$\operatorname {\mathcal {M}}$, with  $A=0.25$ and
$A=0.25$ and  $\operatorname {\mathcal {B}}=0.0024$. Grey crosses indicate simulations where a liquid plug formed, while black dots indicate simulations where a plug did not form. Within the plugging region, the grey contours indicate the plugging time,
$\operatorname {\mathcal {B}}=0.0024$. Grey crosses indicate simulations where a liquid plug formed, while black dots indicate simulations where a plug did not form. Within the plugging region, the grey contours indicate the plugging time,  $t_p$.
$t_p$.
Figure 10(b) illustrates the effect on the dynamics of varying  $\operatorname {\mathcal {M}}$ and
$\operatorname {\mathcal {M}}$ and  $\epsilon$. It shows data from many simulations, some of which are stable and some form plugs. The boundary between the stable and unstable regions in the data can be identified as
$\epsilon$. It shows data from many simulations, some of which are stable and some form plugs. The boundary between the stable and unstable regions in the data can be identified as  $\epsilon _{crit}$, so the dependence of the critical layer thickness on
$\epsilon _{crit}$, so the dependence of the critical layer thickness on  $\operatorname {\mathcal {M}}$ can be seen. At low
$\operatorname {\mathcal {M}}$ can be seen. At low  $\operatorname {\mathcal {M}}$, the critical thickness for the surfactant-free problem is recovered, and as
$\operatorname {\mathcal {M}}$, the critical thickness for the surfactant-free problem is recovered, and as  $\operatorname {\mathcal {M}}$ is increased,
$\operatorname {\mathcal {M}}$ is increased,  $\epsilon _{crit}$ increases to a significantly higher value for large
$\epsilon _{crit}$ increases to a significantly higher value for large  $\operatorname {\mathcal {M}}$. Therefore, for this value of
$\operatorname {\mathcal {M}}$. Therefore, for this value of  $\operatorname {\mathcal {B}}$, there is a range of layer thicknesses
$\operatorname {\mathcal {B}}$, there is a range of layer thicknesses  $0.14\lesssim \epsilon \lesssim 0.185$ where increasing the surfactant strength sufficiently, without changing any other parameters, can suppress plug formation. This stabilisation of the system by increasing the surfactant strength resembles what was seen in the thin-film system (figure 5). Again, surfactant has a powerful effect at low concentrations: the range
$0.14\lesssim \epsilon \lesssim 0.185$ where increasing the surfactant strength sufficiently, without changing any other parameters, can suppress plug formation. This stabilisation of the system by increasing the surfactant strength resembles what was seen in the thin-film system (figure 5). Again, surfactant has a powerful effect at low concentrations: the range  $10^{-2}<\operatorname {\mathcal {M}}<10^{-1}$, over which
$10^{-2}<\operatorname {\mathcal {M}}<10^{-1}$, over which  $\epsilon _{crit}$ changes appreciably in figure 10(b), corresponds to a maximum relative reduction of surface tension of between
$\epsilon _{crit}$ changes appreciably in figure 10(b), corresponds to a maximum relative reduction of surface tension of between  $1\,\%$ and
$1\,\%$ and  $10\,\%$. Figure 10(b) also quantifies how the plugging time increases as
$10\,\%$. Figure 10(b) also quantifies how the plugging time increases as  $\operatorname {\mathcal {M}}$ is increased. We know increasing
$\operatorname {\mathcal {M}}$ is increased. We know increasing  $\operatorname {\mathcal {B}}$ extends the plugging time (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), and figure 10(b) shows it can be extended further again by introducing surfactant. However, the profound stabilisation effect by surfactant is not due mainly to slowing of the dynamics as it is in the Newtonian problem (Halpern & Grotberg Reference Halpern and Grotberg1993). Instead, figure 10(b) highlights how the increase in
$\operatorname {\mathcal {B}}$ extends the plugging time (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), and figure 10(b) shows it can be extended further again by introducing surfactant. However, the profound stabilisation effect by surfactant is not due mainly to slowing of the dynamics as it is in the Newtonian problem (Halpern & Grotberg Reference Halpern and Grotberg1993). Instead, figure 10(b) highlights how the increase in  $\epsilon _{crit}$ due to rigidification and stabilisation of the layer by yield stress is amplified by the presence of sufficiently strong surfactant.
$\epsilon _{crit}$ due to rigidification and stabilisation of the layer by yield stress is amplified by the presence of sufficiently strong surfactant.
The value of  $\epsilon _{crit}$ and the dynamics leading to plug formation are necessarily dependent on the initial perturbation applied to the layer, which here is parametrised by
$\epsilon _{crit}$ and the dynamics leading to plug formation are necessarily dependent on the initial perturbation applied to the layer, which here is parametrised by  $A$. With a larger initial perturbation, there can be more yielding at larger values of
$A$. With a larger initial perturbation, there can be more yielding at larger values of  $\operatorname {\mathcal {B}}$. However, we have found that varying the initial conditions does not qualitatively affect the results presented. The finite time to which we run simulations,
$\operatorname {\mathcal {B}}$. However, we have found that varying the initial conditions does not qualitatively affect the results presented. The finite time to which we run simulations,  $\tilde {t}=10^4$, will have some effect on the computed value of
$\tilde {t}=10^4$, will have some effect on the computed value of  $\epsilon _{crit}$, but figure 10(b) shows that the plugging time increases rapidly close to the computed value of
$\epsilon _{crit}$, but figure 10(b) shows that the plugging time increases rapidly close to the computed value of  $\epsilon _{crit}$, suggesting that there is good convergence to the true value of
$\epsilon _{crit}$, suggesting that there is good convergence to the true value of  $\epsilon _{crit}$.
$\epsilon _{crit}$.
5. Discussion
We have developed two models, using long-wave and thin-film theories, of the capillary instability of a viscoplastic layer coating a cylindrical tube where insoluble surfactant is present at the air–liquid interface. This flow can be strongly modified both by the strength of the yield stress, described by the capillary Bingham number, and the strength of the surfactant, described by the Marangoni number. We showed that the layer can exhibit five qualitatively different types of yielding, which are different combinations of fully yielded shear flow, pseudo-plugs and rigid plugs, depending on the relative strengths of the capillary and Marangoni forces. Numerical simulations highlighted the complex dynamical transitions between these yielding types that can occur as the layer evolves.
For thin layers, we quantified how introducing surfactant enhances the stabilising effect of the yield stress and induces an effective doubling of  $B$ when
$B$ when  $M$ is sufficiently large. Asymptotic analysis of the late-time behaviour in § 3.2, valid for moderate and large
$M$ is sufficiently large. Asymptotic analysis of the late-time behaviour in § 3.2, valid for moderate and large  $M$, showed that the final static, marginally yielded configuration of a surfactant-laden layer coincides with that of a surfactant-free layer but with
$M$, showed that the final static, marginally yielded configuration of a surfactant-laden layer coincides with that of a surfactant-free layer but with  $B$ exactly doubled. Static, marginally yielded solutions were also shown to accurately predict the critical capillary Bingham number above which instability is suppressed, for both small and large Marangoni numbers (figure 5). When
$B$ exactly doubled. Static, marginally yielded solutions were also shown to accurately predict the critical capillary Bingham number above which instability is suppressed, for both small and large Marangoni numbers (figure 5). When  $M$ is asymptotically large, the entire thin-film dynamics coincides with that of a surfactant-free layer but with time slowed by a factor of four and
$M$ is asymptotically large, the entire thin-film dynamics coincides with that of a surfactant-free layer but with time slowed by a factor of four and  $B$ doubled.
$B$ doubled.
For thicker layers, we quantified how the known effect of yield stress in delaying or suppressing plug formation (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022) is amplified by introducing surfactant. Using numerical solutions of the long-wave equations, which describe the motion of thick films, we showed that the approximately four-fold increase in plugging time when strong surfactant is introduced to a thick Newtonian layer (Otis et al. Reference Otis, Johnson, Pedley and Kamm1990; Halpern & Grotberg Reference Halpern and Grotberg1993) can become much larger when the liquid is viscoplastic (figure 8). The critical layer thickness required for a plug to form is also known to increase as the capillary Bingham number is increased (Shemilt et al. Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022). In figure 10, we quantified how this increase is amplified when sufficiently strong surfactant is present; the threshold for surfactant to have an appreciable effect corresponds to a relative surface-tension reduction of only a few percent. By examining the limit of large Marangoni number in § 4.2, we found that surface velocities are induced by local changes to the shape of the interface during plug formation, which act to redistribute surfactant and uniformly raise the concentration globally.
The results suggest a mechanism for the stabilising effect of pulmonary surfactant in the small airways, particularly in diseases where mucus yield stress is increased such as cystic fibrosis (Patarin et al. Reference Patarin, Ghiringhelli, Darsy, Obamba, Bochu and de Saint Vincent2020). Figure 8(b) illustrates the delay to plug formation caused by surfactant. In these simulations, plug formation occurs at  $t_p\approx 35$ when there is no surfactant and
$t_p\approx 35$ when there is no surfactant and  $t_p\approx 268$ when there is surfactant. We can relate these dimensionless times to real time scales in the lungs by taking the following physiologically relevant parameters values for a 12th generation airway: airway radius,
$t_p\approx 268$ when there is surfactant. We can relate these dimensionless times to real time scales in the lungs by taking the following physiologically relevant parameters values for a 12th generation airway: airway radius,  $a=0.4$ mm (Hsia, Hyde & Weibel Reference Hsia, Hyde and Weibel2016); equilibrium surface tension,
$a=0.4$ mm (Hsia, Hyde & Weibel Reference Hsia, Hyde and Weibel2016); equilibrium surface tension,  $\sigma _0=30\,\textrm {mN}\,\textrm {m}^{-1}$ (Chen et al. Reference Chen, Zhong, Luo, Deng, Hu and Song2019) and viscosity,
$\sigma _0=30\,\textrm {mN}\,\textrm {m}^{-1}$ (Chen et al. Reference Chen, Zhong, Luo, Deng, Hu and Song2019) and viscosity,  $\eta =0.01$ Pa s (Lai et al. Reference Lai, Wang, Wirtz and Hanes2009). Using these values,
$\eta =0.01$ Pa s (Lai et al. Reference Lai, Wang, Wirtz and Hanes2009). Using these values,  $t_p\approx 35$ and
$t_p\approx 35$ and  $t_p\approx 268$ correspond to real plugging times of
$t_p\approx 268$ correspond to real plugging times of  $t_p^*\approx 1.7$ s and
$t_p^*\approx 1.7$ s and  $t_p^*\approx 13$ s. Whilst there is significant variation in measurements of rheological parameters for mucus, this suggests that for a 12th generation airway, the plugging time in the surfactant-free simulation is less than the time of a breathing cycle and it is longer than a breathing cycle in the surfactant-laden simulation. This provides evidence that surfactant can make plug formation less likely to occur in an airway.
$t_p^*\approx 13$ s. Whilst there is significant variation in measurements of rheological parameters for mucus, this suggests that for a 12th generation airway, the plugging time in the surfactant-free simulation is less than the time of a breathing cycle and it is longer than a breathing cycle in the surfactant-laden simulation. This provides evidence that surfactant can make plug formation less likely to occur in an airway.
The results presented in figure 10 for the critical layer thickness for plugging to occur also have physiological relevance. Measurements of healthy pulmonary surfactant suggest that Marangoni numbers around  $\operatorname {\mathcal {M}}\approx 1$ are likely to be observed (Schürch et al. Reference Schürch, Bachofen and Possmayer2001), although there is significant variation in measured values. Figure 10(b) illustrates how the critical thickness is increased when
$\operatorname {\mathcal {M}}\approx 1$ are likely to be observed (Schürch et al. Reference Schürch, Bachofen and Possmayer2001), although there is significant variation in measured values. Figure 10(b) illustrates how the critical thickness is increased when  $\operatorname {\mathcal {M}}\approx 1$ compared with when
$\operatorname {\mathcal {M}}\approx 1$ compared with when  $\operatorname {\mathcal {M}}$ is low. There is clinical evidence that in lungs affected by cystic fibrosis, surfactant function is impaired (Gunasekara et al. Reference Gunasekara2017) and that this is linked to increased prevalence of airway obstructions (Griese et al. Reference Griese, Essl, Schmidt, Rietschel, Ratjen, Ballman and Paul2004). Our results are consistent with these clinical observations, and suggest a mechanism for how surfactant deficiency may destabilise airways. Moreover, as discussed by Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), mucolytic therapies commonly used in cystic fibrosis can significantly decrease mucus yield stress (Patarin et al. Reference Patarin, Ghiringhelli, Darsy, Obamba, Bochu and de Saint Vincent2020), which could destabilise airways and trigger plug formation if the mucus layer is thick. One of these mucolytic drugs, rhDNAse, has been linked with increased lung exacerbations and a decline in lung function in patients with idiopathic bronchiectasis (O'Donnell et al. Reference O'Donnell, Barker, Ilowite and Fick1998). The evidence of surfactant amplifying yield-stress effects suggests surfactant needs to be accounted for when considering the impacts of mucolytic drugs that significantly lower the mucus yield stress.
$\operatorname {\mathcal {M}}$ is low. There is clinical evidence that in lungs affected by cystic fibrosis, surfactant function is impaired (Gunasekara et al. Reference Gunasekara2017) and that this is linked to increased prevalence of airway obstructions (Griese et al. Reference Griese, Essl, Schmidt, Rietschel, Ratjen, Ballman and Paul2004). Our results are consistent with these clinical observations, and suggest a mechanism for how surfactant deficiency may destabilise airways. Moreover, as discussed by Shemilt et al. (Reference Shemilt, Horsley, Jensen, Thompson and Whitfield2022), mucolytic therapies commonly used in cystic fibrosis can significantly decrease mucus yield stress (Patarin et al. Reference Patarin, Ghiringhelli, Darsy, Obamba, Bochu and de Saint Vincent2020), which could destabilise airways and trigger plug formation if the mucus layer is thick. One of these mucolytic drugs, rhDNAse, has been linked with increased lung exacerbations and a decline in lung function in patients with idiopathic bronchiectasis (O'Donnell et al. Reference O'Donnell, Barker, Ilowite and Fick1998). The evidence of surfactant amplifying yield-stress effects suggests surfactant needs to be accounted for when considering the impacts of mucolytic drugs that significantly lower the mucus yield stress.
Our results also suggest that introducing surfactant can decrease the peak value of the shear stress induced on the tube wall during the evolution of the liquid layer (figure 3c). This suggests that surfactants in airways are likely to provide protection against epithelial cell damage, which can occur when a sufficiently large stress is exerted on the airway wall (Huh et al. Reference Huh, Fujioka, Tung, Futai, Paine, Grotberg and Takayama2007). This is consistent with previously reported effects of introducing surfactant to a Newtonian layer (Romanò et al. Reference Romanò, Muradoglu and Grotberg2022).
The theory we have used here could be easily modified to study other related flows. For example, the surface Marangoni force could be replaced by a force caused by an oscillating air flow, something that has been studied previously in the case that the liquid is Newtonian (Halpern & Grotberg Reference Halpern and Grotberg2003). Beyond the application to airway modelling, the present theory could be used to study the effect of surfactant on other capillary flows of viscoplastic fluids. For example, one possible industrial application that has received recent modelling attention is ink-jet printing (Jalaal et al. Reference Jalaal, Stoeber and Balmforth2021; van der Kolk et al. Reference van der Kolk, Tieman and Jalaal2023), where the effects of surfactant have not yet been studied but may be important. The flow region maps that we have introduced (figures 2, 3a and 6) may also prove useful in other problems by illustrating the transitions between different types of yielding.
There are many limitations to the modelling approach we have taken. Several physiologically relevant effects have not been included in the model, such as gravity, air flow and more complex liquid rheologies. However, the relative simplicity of the model has allowed for extensive exploration of parameter space to systematically examine the effect of surfactant on this flow. We have assumed a linear relation between surface tension and surfactant concentration, despite this typically being nonlinear for pulmonary surfactants (Schürch et al. Reference Schürch, Bachofen and Possmayer2001). With this assumption, the model is simplified but still retains sufficient complexity to capture the key effects of surfactant on the flow. As discussed in § 4.2, whilst we have explored a wide range of  $\operatorname {\mathcal {M}}$, the linear surfactant equation of state limits how large we can make
$\operatorname {\mathcal {M}}$, the linear surfactant equation of state limits how large we can make  $\operatorname {\mathcal {M}}$ in our long-wave simulations. To fully explore the large-
$\operatorname {\mathcal {M}}$ in our long-wave simulations. To fully explore the large- $\operatorname {\mathcal {M}}$ limit in the future, a nonlinear equation of state should be used. The quasi-one-dimensional long-wave theory has been shown to provide a good approximation to the dynamics of thick films in similar problems (e.g. Halpern et al. Reference Halpern, Fujioka and Grotberg2010) so we expect it to perform well here also, but our predictions await validation against fully two-dimensional CFD simulations. Long-wave theory is known to break down immediately before plug formation (Johnson et al. Reference Johnson, Kamm, Ho, Shapiro and Pedley1991), so to extend the analysis to study coalescence and the post-coalescence phase would require a fully two-dimensional model, in line with what has been done in the Newtonian case (Romanò et al. Reference Romanò, Muradoglu and Grotberg2022).
$\operatorname {\mathcal {M}}$ limit in the future, a nonlinear equation of state should be used. The quasi-one-dimensional long-wave theory has been shown to provide a good approximation to the dynamics of thick films in similar problems (e.g. Halpern et al. Reference Halpern, Fujioka and Grotberg2010) so we expect it to perform well here also, but our predictions await validation against fully two-dimensional CFD simulations. Long-wave theory is known to break down immediately before plug formation (Johnson et al. Reference Johnson, Kamm, Ho, Shapiro and Pedley1991), so to extend the analysis to study coalescence and the post-coalescence phase would require a fully two-dimensional model, in line with what has been done in the Newtonian case (Romanò et al. Reference Romanò, Muradoglu and Grotberg2022).
In this study, we have quantified how surfactant can amplify the effect of viscoplastic rheology during the capillary instability of a liquid film coating a tube. In addition to slowing the dynamics, sufficiently strong Marangoni forces can induce an effective doubling of the capillary Bingham number for thin films. For thick films with a large enough capillary Bingham number, the critical thickness required for plug formation to occur can be significantly increased by the presence of surfactant. These results suggest a mechanism for how pulmonary surfactant can stabilise airways and how surfactant deficiency can contribute to the prevalence of mucus plugging in obstructive lung diseases.
Acknowledgements
A.H., O.E.J. and C.A.W. are all supported by the NIHR Manchester Biomedical Research Centre. The views expressed in this publication are those of the author(s) and not necessarily those of the NHS, the National Institute for Health Research, Health Education England or the Department of Health.
Funding
J.D.S. was supported by an Engineering and Physical Sciences Research Council Doctoral Training Award. This research was co-funded by the NIHR Manchester Biomedical Research Centre (A.H., grant number NIHR203308) and the Engineering and Physical Sciences Research Council (A.B.T., grant number EP/T021365/1).
Declaration of interests
The authors report no conflict of interest.
Data availability statement
The code used to generate the data in this study is openly available at https://doi.org/10.5281/zenodo.7794532.
Appendix A. Derivation of long-wave evolution equations
To derive evolution equations in the long-wave limit, we insert the scaled variables (2.22) into the dimensionless governing equations (2.10)–(2.21) and then truncate at leading order in  $\delta$. Mass and momentum conservation, to leading order, are
$\delta$. Mass and momentum conservation, to leading order, are
 \begin{equation} 0 = \partial_{\bar{z}}\bar{w} +\frac{1}{r}\partial_r(r\bar{u}),\quad0=\partial_r{p},\quad \partial_{\bar{z}}{p}=\frac{1}{r}\partial_r(r\bar{\tau}_{rz}). \end{equation}
\begin{equation} 0 = \partial_{\bar{z}}\bar{w} +\frac{1}{r}\partial_r(r\bar{u}),\quad0=\partial_r{p},\quad \partial_{\bar{z}}{p}=\frac{1}{r}\partial_r(r\bar{\tau}_{rz}). \end{equation}The no slip boundary conditions at the wall are
 \begin{equation} \bar{u} = \bar{w} = 0 \quad \mbox{on} \ r= 1 \end{equation}
\begin{equation} \bar{u} = \bar{w} = 0 \quad \mbox{on} \ r= 1 \end{equation}and the interfacial boundary conditions are
 \begin{equation} \partial_{\bar{t}}R+\bar{w}\partial_{\bar{z}}R = \bar{u},\quad{p} = - \kappa [1+\operatorname{\mathcal{M}}(1-\varGamma)], \quad\bar\tau_{rz} = {\operatorname{\mathcal{M}}}\partial_{\bar{z}}\varGamma, \quad\mbox{on}\ r = R. \end{equation}
\begin{equation} \partial_{\bar{t}}R+\bar{w}\partial_{\bar{z}}R = \bar{u},\quad{p} = - \kappa [1+\operatorname{\mathcal{M}}(1-\varGamma)], \quad\bar\tau_{rz} = {\operatorname{\mathcal{M}}}\partial_{\bar{z}}\varGamma, \quad\mbox{on}\ r = R. \end{equation}
As discussed in § 2.3, in (A3b), we retain the full expression for  $\kappa$ given by (2.16) rather than truncating it. The surfactant transport equation (2.21) at leading order is
$\kappa$ given by (2.16) rather than truncating it. The surfactant transport equation (2.21) at leading order is
 \begin{equation} \partial_{\bar{t}}\left(R\varGamma\right) + \partial_{\bar{z}}\left(\bar{w}_sR\varGamma\right) = 0, \end{equation}
\begin{equation} \partial_{\bar{t}}\left(R\varGamma\right) + \partial_{\bar{z}}\left(\bar{w}_sR\varGamma\right) = 0, \end{equation}
where  $\bar {w}_s$ is the leading-order surface velocity. Using (A1a), (A2) and (A3a), we can derive the evolution equation,
$\bar {w}_s$ is the leading-order surface velocity. Using (A1a), (A2) and (A3a), we can derive the evolution equation,
 \begin{equation} \partial_{\bar{t}}R = \frac{1}{R}\partial_{\bar{z}}\bar{Q},\quad\mbox{where}\ \bar{Q} = \int_R^1\bar{w}r\,\mathrm{d}r. \end{equation}
\begin{equation} \partial_{\bar{t}}R = \frac{1}{R}\partial_{\bar{z}}\bar{Q},\quad\mbox{where}\ \bar{Q} = \int_R^1\bar{w}r\,\mathrm{d}r. \end{equation}
Equations (A4) and (A5) are the long-wave evolution equations for  $R$ and
$R$ and  $\varGamma$, but they need to be closed by deriving expressions for the surface velocity,
$\varGamma$, but they need to be closed by deriving expressions for the surface velocity,  $\bar {w}_s$, and the axial volume flux,
$\bar {w}_s$, and the axial volume flux,  $\bar {Q}$, which we pursue below. When presenting (A4) and (A5) in § 2.3, we rewrite them in terms of the unscaled variables (2.9), but they are entirely equivalent to the versions given here in terms of the scaled variables.
$\bar {Q}$, which we pursue below. When presenting (A4) and (A5) in § 2.3, we rewrite them in terms of the unscaled variables (2.9), but they are entirely equivalent to the versions given here in terms of the scaled variables.
From (A1b) and (A3b), we deduce that
 \begin{equation} p(\bar{z},\bar{t}) = - \kappa\left[1+\mathcal{M}(1-\varGamma)\right]. \end{equation}
\begin{equation} p(\bar{z},\bar{t}) = - \kappa\left[1+\mathcal{M}(1-\varGamma)\right]. \end{equation}Integrating (A1c) and using (A3c), we get an expression for the leading-order shear stress,
 \begin{equation} \bar\tau_{rz} = \frac{\partial_{\bar{z}}p}{2}\left(r-\frac{R^2}{r}\right) + \frac{R}{r}{\operatorname{\mathcal{M}}}\partial_{\bar{z}}\varGamma.\end{equation}
\begin{equation} \bar\tau_{rz} = \frac{\partial_{\bar{z}}p}{2}\left(r-\frac{R^2}{r}\right) + \frac{R}{r}{\operatorname{\mathcal{M}}}\partial_{\bar{z}}\varGamma.\end{equation}
Note that (A7) holds independently of any rheological considerations. The non-zero components of the strain-rate tensor, up to  $O(\delta ^2)$, are
$O(\delta ^2)$, are
 \begin{equation} \dot\gamma_{rz} \sim \delta\partial_r\bar{w},\quad \dot\gamma_{zz} \sim 2\delta^2\partial_{\bar{z}}\bar{w},\quad\dot\gamma_{rr} \sim 2\delta^2\partial_r{\bar{u}},\quad \dot\gamma_{\theta\theta} \sim \delta^2\frac{\bar{u}}{r}. \end{equation}
\begin{equation} \dot\gamma_{rz} \sim \delta\partial_r\bar{w},\quad \dot\gamma_{zz} \sim 2\delta^2\partial_{\bar{z}}\bar{w},\quad\dot\gamma_{rr} \sim 2\delta^2\partial_r{\bar{u}},\quad \dot\gamma_{\theta\theta} \sim \delta^2\frac{\bar{u}}{r}. \end{equation}
Therefore, the constitutive relation (2.17) implies that, if  $|\bar {\tau }_{rz}|> \bar {\mathcal {B}}$, where
$|\bar {\tau }_{rz}|> \bar {\mathcal {B}}$, where  $\bar {\mathcal {B}} = \mathcal {B}/\delta$, then
$\bar {\mathcal {B}} = \mathcal {B}/\delta$, then
 \begin{equation} \bar{\tau}_{rz} = \left(1+\frac{\bar{\mathcal{B}}}{|\partial_{r}\bar{w}|}\right)\partial_{r}\bar{w}, \end{equation}
\begin{equation} \bar{\tau}_{rz} = \left(1+\frac{\bar{\mathcal{B}}}{|\partial_{r}\bar{w}|}\right)\partial_{r}\bar{w}, \end{equation}
and the leading-order normal stresses are all of size  $O(\delta )$. We call regions of the flow where
$O(\delta )$. We call regions of the flow where  $|\bar {\tau }_{rz}|>\bar {\mathcal {B}}$ shear-dominated or fully yielded. As identified by Balmforth & Craster (Reference Balmforth and Craster1999) for thin-film flows, regions where
$|\bar {\tau }_{rz}|>\bar {\mathcal {B}}$ shear-dominated or fully yielded. As identified by Balmforth & Craster (Reference Balmforth and Craster1999) for thin-film flows, regions where  $|\bar {\tau }_{rz}|\leq \bar {\mathcal {B}}$ exhibit plug-like flow, with
$|\bar {\tau }_{rz}|\leq \bar {\mathcal {B}}$ exhibit plug-like flow, with  $\partial _r\bar {w}=0$ to leading order. These plug-like regions can be yielded, with the normal stresses becoming
$\partial _r\bar {w}=0$ to leading order. These plug-like regions can be yielded, with the normal stresses becoming  $O(1)$ and the second invariant of the stress becoming exactly equal to
$O(1)$ and the second invariant of the stress becoming exactly equal to  $\bar {\mathcal {B}}$ to leading order. To derive an expression for
$\bar {\mathcal {B}}$ to leading order. To derive an expression for  $\bar {w}$ that holds everywhere in the layer, we will use (A7) to determine the boundaries between the shear-dominated and plug-like regions, which are the surfaces satisfying
$\bar {w}$ that holds everywhere in the layer, we will use (A7) to determine the boundaries between the shear-dominated and plug-like regions, which are the surfaces satisfying  $|\bar {\tau }_{rz}|=\bar {\mathcal {B}}$, then use (A9) to find
$|\bar {\tau }_{rz}|=\bar {\mathcal {B}}$, then use (A9) to find  $\bar {w}$ in the shear-dominated regions and, finally, match these to the
$\bar {w}$ in the shear-dominated regions and, finally, match these to the  $r$-independent expression for
$r$-independent expression for  $\bar {w}$ in the plug-like regions. Note that since
$\bar {w}$ in the plug-like regions. Note that since  $\bar {\tau }_{rz}$ is quadratic in
$\bar {\tau }_{rz}$ is quadratic in  $r$ (A7), there can be at most two shear-dominated regions and one plug-like region within
$r$ (A7), there can be at most two shear-dominated regions and one plug-like region within  $R\leq r\leq 1$. We will define the boundaries between shear-dominated and plug-like regions as
$R\leq r\leq 1$. We will define the boundaries between shear-dominated and plug-like regions as  $r=\varPsi _\pm$, such that the shear-dominated regions are
$r=\varPsi _\pm$, such that the shear-dominated regions are  $R\leq r\leq \varPsi _-$ and
$R\leq r\leq \varPsi _-$ and  $\varPsi _+\leq r\leq 1$, and the plug-like region is
$\varPsi _+\leq r\leq 1$, and the plug-like region is  $\varPsi _-\leq r\leq \varPsi _+$. Any of these three regions may not exist at a given point, in which case, the width of it will be zero. There are four separate cases that we must consider separately below, depending on how many roots there are to each of the equations
$\varPsi _-\leq r\leq \varPsi _+$. Any of these three regions may not exist at a given point, in which case, the width of it will be zero. There are four separate cases that we must consider separately below, depending on how many roots there are to each of the equations  $\bar {\tau }_{rz}=\pm \bar {\operatorname {\mathcal {B}}}$. Figure 11 illustrates where in
$\bar {\tau }_{rz}=\pm \bar {\operatorname {\mathcal {B}}}$. Figure 11 illustrates where in  $(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space each of these four cases occurs.
$(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space each of these four cases occurs.

Figure 11. Map of  $(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space with the shading indicating the locations of cases 1–4, which are considered separately to derive the evolution equations in Appendix A. In this figure, subscripts denote derivatives. The map shown here corresponds exactly with figure 2(b), which shows the location of the yielding types I–V. Unlike in figure 2(b), here the map is plotted in terms of scaled variables (2.22), but this just corresponds to a uniform scaling of the whole space by
$(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space with the shading indicating the locations of cases 1–4, which are considered separately to derive the evolution equations in Appendix A. In this figure, subscripts denote derivatives. The map shown here corresponds exactly with figure 2(b), which shows the location of the yielding types I–V. Unlike in figure 2(b), here the map is plotted in terms of scaled variables (2.22), but this just corresponds to a uniform scaling of the whole space by  $\delta$.
$\delta$.
Case 1.  $2{\operatorname {\mathcal {M}}}\partial _{\bar {z}}\varGamma /(R\partial _{\bar {z}}p)<1$ and
$2{\operatorname {\mathcal {M}}}\partial _{\bar {z}}\varGamma /(R\partial _{\bar {z}}p)<1$ and  $\partial _{\bar {z}}p\neq 0$. Figure 11 shows that this case occurs in the upper-left and lower-right regions of
$\partial _{\bar {z}}p\neq 0$. Figure 11 shows that this case occurs in the upper-left and lower-right regions of  $(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space, where capillary and Marangoni forces either act in opposite directions or, if they act in the same direction, the Marangoni force is relatively weak.
$(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space, where capillary and Marangoni forces either act in opposite directions or, if they act in the same direction, the Marangoni force is relatively weak.
In this case,  $\bar {\tau }_{rz}$ is monotonic for
$\bar {\tau }_{rz}$ is monotonic for  $r>0$, so there is exactly one solution to
$r>0$, so there is exactly one solution to  $\bar {\tau }_{rz}=\bar {\operatorname {\mathcal {B}}}$ and exactly one solution to
$\bar {\tau }_{rz}=\bar {\operatorname {\mathcal {B}}}$ and exactly one solution to  $\bar {\tau }_{rz}=-\bar {\operatorname {\mathcal {B}}}$. We define
$\bar {\tau }_{rz}=-\bar {\operatorname {\mathcal {B}}}$. We define  $r=\psi _{\pm }^{(1)}$ as the surfaces such that
$r=\psi _{\pm }^{(1)}$ as the surfaces such that  $\bar {\tau }_{rz}=\pm \bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}p)$. From (A7), we get
$\bar {\tau }_{rz}=\pm \bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}p)$. From (A7), we get
 \begin{equation} \psi_{{\pm}}^{(1)} ={\pm}\frac{\bar{\operatorname{\mathcal{B}}}}{|\partial_{\bar{z}}{p}|}+\sqrt{\left(\frac{\bar{\operatorname{\mathcal{B}}}}{\partial_{\bar{z}}{p}}\right)^2 + R^2 - \frac{2R{\operatorname{\mathcal{M}}}\partial_{\bar{z}}\varGamma}{\partial_{\bar{z}}{p}}}. \end{equation}
\begin{equation} \psi_{{\pm}}^{(1)} ={\pm}\frac{\bar{\operatorname{\mathcal{B}}}}{|\partial_{\bar{z}}{p}|}+\sqrt{\left(\frac{\bar{\operatorname{\mathcal{B}}}}{\partial_{\bar{z}}{p}}\right)^2 + R^2 - \frac{2R{\operatorname{\mathcal{M}}}\partial_{\bar{z}}\varGamma}{\partial_{\bar{z}}{p}}}. \end{equation}
The functions  $\psi _{\pm }^{(1)}$ could take any positive value, and whether the surfaces
$\psi _{\pm }^{(1)}$ could take any positive value, and whether the surfaces  $r=\psi _{\pm }^{(1)}$ lie within the layer,
$r=\psi _{\pm }^{(1)}$ lie within the layer,  $R< r<1$, or not determines which of the shear-dominated and plug-like regions exist. If both surfaces lie within the layer, i.e.
$R< r<1$, or not determines which of the shear-dominated and plug-like regions exist. If both surfaces lie within the layer, i.e.  $R<\psi _-^{(1)}\leq \psi _+^{(1)}<1$, then
$R<\psi _-^{(1)}\leq \psi _+^{(1)}<1$, then  $\varPsi _{\pm }=\psi _{\pm }^{(1)}$ and both shear-dominated regions and the plug-like region exist. We say that the layer is exhibiting yielding of type I (see figure 2a). If, instead,
$\varPsi _{\pm }=\psi _{\pm }^{(1)}$ and both shear-dominated regions and the plug-like region exist. We say that the layer is exhibiting yielding of type I (see figure 2a). If, instead,  $\psi _-^{(1)}\leq R<\psi _+^{(1)}<1$, then
$\psi _-^{(1)}\leq R<\psi _+^{(1)}<1$, then  $\varPsi _+ = \psi _+^{(1)}$ and
$\varPsi _+ = \psi _+^{(1)}$ and  $\varPsi _-=R$, and there is yielding of type II. If
$\varPsi _-=R$, and there is yielding of type II. If  $\psi _\pm ^{(1)}\leq R$, then
$\psi _\pm ^{(1)}\leq R$, then  $\varPsi _\pm =R$ and there is yielding of type III. Similarly, if
$\varPsi _\pm =R$ and there is yielding of type III. Similarly, if  $\psi _{\pm }^{(1)}\geq 1$, then
$\psi _{\pm }^{(1)}\geq 1$, then  $\varPsi _{\pm }=1$ and there is also yielding of type III. If
$\varPsi _{\pm }=1$ and there is also yielding of type III. If  $R<\psi _-^{(1)}<1\leq \psi _+^{(1)}$, then
$R<\psi _-^{(1)}<1\leq \psi _+^{(1)}$, then  $\varPsi _-=\psi _-^{(1)}$ and
$\varPsi _-=\psi _-^{(1)}$ and  $\varPsi _+=1$, and there is yielding of type IV. Finally, if
$\varPsi _+=1$, and there is yielding of type IV. Finally, if  $\psi _-^{(1)}< R<1<\psi ^{(1)}_+$, then
$\psi _-^{(1)}< R<1<\psi ^{(1)}_+$, then  $\varPsi _-=R$,
$\varPsi _-=R$,  $\varPsi _+=1$ and there is no yielding (type V). We can identify that all of the above cases are captured by defining
$\varPsi _+=1$ and there is no yielding (type V). We can identify that all of the above cases are captured by defining
 \begin{equation} \varPsi_\pm = \max[R,\min(1,\psi_{{\pm}}^{(1)})]. \end{equation}
\begin{equation} \varPsi_\pm = \max[R,\min(1,\psi_{{\pm}}^{(1)})]. \end{equation} With the expressions for  $\varPsi _\pm$ now established, we can proceed to determine
$\varPsi _\pm$ now established, we can proceed to determine  $\bar {w}$. In
$\bar {w}$. In  $\varPsi _+\leq r \leq 1$, we equate (A7) with (A9), solve for
$\varPsi _+\leq r \leq 1$, we equate (A7) with (A9), solve for  $\partial _{r}\bar {w}$, then integrate and use (A2). We also need to use the fact that
$\partial _{r}\bar {w}$, then integrate and use (A2). We also need to use the fact that  $\operatorname {sgn}(\partial _r\bar {w})=\operatorname {sgn}(\partial _{\bar {z}}p)$ in
$\operatorname {sgn}(\partial _r\bar {w})=\operatorname {sgn}(\partial _{\bar {z}}p)$ in  $\varPsi _+\leq r \leq 1$. Doing this gives
$\varPsi _+\leq r \leq 1$. Doing this gives
 \begin{equation} \bar{w} = \frac{\partial_{\bar{z}}{p}}{4}(r^2-1-2R^2\log r)+{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma) R\log r -{\bar{\operatorname{\mathcal{B}}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(r-1) \end{equation}
\begin{equation} \bar{w} = \frac{\partial_{\bar{z}}{p}}{4}(r^2-1-2R^2\log r)+{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma) R\log r -{\bar{\operatorname{\mathcal{B}}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(r-1) \end{equation}
for  $\varPsi _+\leq r \leq 1$. We then determine the velocity in the plug-like region,
$\varPsi _+\leq r \leq 1$. We then determine the velocity in the plug-like region,  $\varPsi _-\leq r\leq \varPsi _+$, by evaluating (A12) at
$\varPsi _-\leq r\leq \varPsi _+$, by evaluating (A12) at  $r=\varPsi _+$. Therefore,
$r=\varPsi _+$. Therefore,  $\bar {w}=\bar {w}_p(\bar {z},\bar {t})$ in
$\bar {w}=\bar {w}_p(\bar {z},\bar {t})$ in  $\varPsi _-\leq r\leq \varPsi _+$, where
$\varPsi _-\leq r\leq \varPsi _+$, where
 \begin{equation} \bar{w}_p=\frac{\partial_{\bar{z}}{p}}{4}(\varPsi_+^2-1-2R^2\log\varPsi_+) +{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma)R\log\varPsi_+ - {\bar{\operatorname{\mathcal{B}}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(\varPsi_+ - 1). \end{equation}
\begin{equation} \bar{w}_p=\frac{\partial_{\bar{z}}{p}}{4}(\varPsi_+^2-1-2R^2\log\varPsi_+) +{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma)R\log\varPsi_+ - {\bar{\operatorname{\mathcal{B}}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(\varPsi_+ - 1). \end{equation}
From (A13), we have the value of  $\bar {w}$ at
$\bar {w}$ at  $r=\varPsi _-$, which can be used to find
$r=\varPsi _-$, which can be used to find  $\bar {w}$ in the shear-dominated region,
$\bar {w}$ in the shear-dominated region,  $R\leq r\leq \varPsi _-$, using the same procedure as above, but noting that instead,
$R\leq r\leq \varPsi _-$, using the same procedure as above, but noting that instead,  $\operatorname {sgn}(\partial _r\bar {w})=-\operatorname {sgn}(\partial _{\bar {z}}p)$. We get
$\operatorname {sgn}(\partial _r\bar {w})=-\operatorname {sgn}(\partial _{\bar {z}}p)$. We get
 \begin{align} \bar{w} = \bar{w}_p + \frac{\partial_{\bar{z}}{p}}{4}\left[r^2-\varPsi_-^2-2R^2\log\left(\frac{r}{\varPsi_-}\right)\right]+{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma)R\log\left(\frac{r}{\varPsi_-}\right)+\bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(r-\varPsi_-) \end{align}
\begin{align} \bar{w} = \bar{w}_p + \frac{\partial_{\bar{z}}{p}}{4}\left[r^2-\varPsi_-^2-2R^2\log\left(\frac{r}{\varPsi_-}\right)\right]+{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma)R\log\left(\frac{r}{\varPsi_-}\right)+\bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(r-\varPsi_-) \end{align}
for  $R\leq r\leq \varPsi _-$. This then completes the leading-order axial velocity in case 1. We can then integrate to determine volume flux,
$R\leq r\leq \varPsi _-$. This then completes the leading-order axial velocity in case 1. We can then integrate to determine volume flux,  $\bar {Q}$, and evaluate (A14) at
$\bar {Q}$, and evaluate (A14) at  $r=R$ to get the surface velocity,
$r=R$ to get the surface velocity,  $\bar {w}_s$. This gives
$\bar {w}_s$. This gives
 \begin{equation} \bar{Q} = - \frac{\partial_{\bar{z}}p}{16}F_1 - \frac{1}{4}\operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)R F_2 - \frac{\bar{\operatorname{\mathcal{B}}}}{6}\operatorname{sgn}(\partial_{\bar{z}}p)(F_3+F_4), \end{equation}
\begin{equation} \bar{Q} = - \frac{\partial_{\bar{z}}p}{16}F_1 - \frac{1}{4}\operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)R F_2 - \frac{\bar{\operatorname{\mathcal{B}}}}{6}\operatorname{sgn}(\partial_{\bar{z}}p)(F_3+F_4), \end{equation}
where the functions  $F_1$,
$F_1$,  $F_2$,
$F_2$,  $F_3$ and
$F_3$ and  $F_4$ are given in (2.29), and
$F_4$ are given in (2.29), and
 \begin{equation} \bar{w}_s = \frac{\partial_{\bar{z}}p}{4}G_1 + \operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)RG_2 + \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}p)(G_3+G_4), \end{equation}
\begin{equation} \bar{w}_s = \frac{\partial_{\bar{z}}p}{4}G_1 + \operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)RG_2 + \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}p)(G_3+G_4), \end{equation}
where the functions  $G_1$,
$G_1$,  $G_2$,
$G_2$,  $G_3$ and
$G_3$ and  $G_4$ are given in (2.32).
$G_4$ are given in (2.32).
Case 2.  $1 + {\bar {\operatorname {\mathcal {B}}}}^2/(R\partial _{\bar {z}}p)^2\geq {2{\operatorname {\mathcal {M}}}\partial _{\bar {z}}\varGamma }/({R\partial _{\bar {z}}p})\geq 1$ and
$1 + {\bar {\operatorname {\mathcal {B}}}}^2/(R\partial _{\bar {z}}p)^2\geq {2{\operatorname {\mathcal {M}}}\partial _{\bar {z}}\varGamma }/({R\partial _{\bar {z}}p})\geq 1$ and  $\partial _{\bar {z}}p\neq 0$. Again, figure 11 illustrates the region of
$\partial _{\bar {z}}p\neq 0$. Again, figure 11 illustrates the region of  $(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space where this case occurs. In this case, there are no solutions to
$(p_{\bar {z}}/\bar {\operatorname {\mathcal {B}}},\operatorname {\mathcal {M}}\varGamma _{\bar {z}}/\bar {\operatorname {\mathcal {B}}})$-space where this case occurs. In this case, there are no solutions to  $\bar {\tau }_{rz}=-\bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}p)$ in
$\bar {\tau }_{rz}=-\bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}p)$ in  $r\geq 0$. We define
$r\geq 0$. We define  $r=\psi _{\pm }^{(2)}$ as the two surfaces on which
$r=\psi _{\pm }^{(2)}$ as the two surfaces on which  $\bar {\tau }_{rz}=\bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}p)$, with
$\bar {\tau }_{rz}=\bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}p)$, with  $\psi _ - ^{(2)}\leq \psi _+^{(2)}$. From (A7), these are
$\psi _ - ^{(2)}\leq \psi _+^{(2)}$. From (A7), these are
 \begin{equation} \psi_{{\pm}}^{(2)} = \frac{\bar{\operatorname{\mathcal{B}}}}{|\partial_{\bar{z}}p|}\pm\sqrt{\left(\frac{\bar{\operatorname{\mathcal{B}}}}{\partial_{\bar{z}}p}\right)^2 + R^2 - \frac{2R{M}\partial_{\bar{z}}\varGamma}{\partial_{\bar{z}}p}}. \end{equation}
\begin{equation} \psi_{{\pm}}^{(2)} = \frac{\bar{\operatorname{\mathcal{B}}}}{|\partial_{\bar{z}}p|}\pm\sqrt{\left(\frac{\bar{\operatorname{\mathcal{B}}}}{\partial_{\bar{z}}p}\right)^2 + R^2 - \frac{2R{M}\partial_{\bar{z}}\varGamma}{\partial_{\bar{z}}p}}. \end{equation}As in case 1 above, by considering all possible types of yielding that can occur, we find
 \begin{equation} \varPsi_\pm = \max[R,\min(1,\psi_{{\pm}}^{(2)})]. \end{equation}
\begin{equation} \varPsi_\pm = \max[R,\min(1,\psi_{{\pm}}^{(2)})]. \end{equation}
We can then proceed similarly to above to derive  $\bar {w}$. The only difference here is that
$\bar {w}$. The only difference here is that  $\partial _r\bar {w}$ has the opposite sign in the near-interface shear-dominated region,
$\partial _r\bar {w}$ has the opposite sign in the near-interface shear-dominated region,  $R\leq r\leq \varPsi _-$, compared with case 1. Hence,
$R\leq r\leq \varPsi _-$, compared with case 1. Hence,  $\bar {w}$ is still given by (A12) in
$\bar {w}$ is still given by (A12) in  $\varPsi _+\leq r\leq 1$, and by (A13) in
$\varPsi _+\leq r\leq 1$, and by (A13) in  $\varPsi _-\leq r \leq \varPsi _+$. However, we have
$\varPsi _-\leq r \leq \varPsi _+$. However, we have
 \begin{align} \bar{w} = \bar{w}_p + \frac{\partial_{\bar{z}}{p}}{4}\left[r^2-\varPsi_-^2-2R^2\log\left(\frac{r}{\varPsi_-}\right)\right]+{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma)R\log\left(\frac{r}{\varPsi_-}\right)-\bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(r-\varPsi_-) \end{align}
\begin{align} \bar{w} = \bar{w}_p + \frac{\partial_{\bar{z}}{p}}{4}\left[r^2-\varPsi_-^2-2R^2\log\left(\frac{r}{\varPsi_-}\right)\right]+{\operatorname{\mathcal{M}}}(\partial_{\bar{z}}\varGamma)R\log\left(\frac{r}{\varPsi_-}\right)-\bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}{p})(r-\varPsi_-) \end{align}
in  $R\leq r \leq \varPsi _-$. This leads to slightly modified expressions for axial volume flux,
$R\leq r \leq \varPsi _-$. This leads to slightly modified expressions for axial volume flux,
 \begin{equation} \bar{Q} = - \frac{\partial_{\bar{z}}p}{16}F_1 - \frac{1}{4}\operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)R F_2 - \frac{\bar{\operatorname{\mathcal{B}}}}{6}\operatorname{sgn}(\partial_{\bar{z}}p)(F_3-F_4), \end{equation}
\begin{equation} \bar{Q} = - \frac{\partial_{\bar{z}}p}{16}F_1 - \frac{1}{4}\operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)R F_2 - \frac{\bar{\operatorname{\mathcal{B}}}}{6}\operatorname{sgn}(\partial_{\bar{z}}p)(F_3-F_4), \end{equation}and surface velocity,
 \begin{equation} \bar{w}_s = \frac{\partial_{\bar{z}}p}{4}G_1 + \operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)RG_2 + \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}p)(G_3-G_4), \end{equation}
\begin{equation} \bar{w}_s = \frac{\partial_{\bar{z}}p}{4}G_1 + \operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)RG_2 + \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}p)(G_3-G_4), \end{equation}in case 2.
Case 3.  $2{\operatorname {\mathcal {M}}}\partial _{\bar {z}}\varGamma /(R\partial _{\bar {z}}{p})>1+ \bar {{\operatorname {\mathcal {B}}}}^2/({R\partial _{\bar {z}}p})^2$. Figure 11 shows that, in this case, capillary and Marangoni forces act in the same direction, with Marangoni forces being relatively strong. In case 3,
$2{\operatorname {\mathcal {M}}}\partial _{\bar {z}}\varGamma /(R\partial _{\bar {z}}{p})>1+ \bar {{\operatorname {\mathcal {B}}}}^2/({R\partial _{\bar {z}}p})^2$. Figure 11 shows that, in this case, capillary and Marangoni forces act in the same direction, with Marangoni forces being relatively strong. In case 3,  $|\bar {\tau }_{rz}|>\bar {\operatorname {\mathcal {B}}}$ for all
$|\bar {\tau }_{rz}|>\bar {\operatorname {\mathcal {B}}}$ for all  $r>0$. Hence, the whole layer is shear-dominated (yield type III). We set
$r>0$. Hence, the whole layer is shear-dominated (yield type III). We set  $\varPsi _+=\varPsi _-=R$. The axial velocity,
$\varPsi _+=\varPsi _-=R$. The axial velocity,  $\bar {w}$ is then given by (A12) for the whole layer,
$\bar {w}$ is then given by (A12) for the whole layer,  $R\leq r \leq 1$. Since there is no contribution from the plug-like region or the near-interface shear-dominated region, the expressions for
$R\leq r \leq 1$. Since there is no contribution from the plug-like region or the near-interface shear-dominated region, the expressions for  $\bar {Q}$ and
$\bar {Q}$ and  $\bar {w}_s$ from case 1, (A15) and (A16), and from case 2, (A20) and (A21), both recover the correct expressions for
$\bar {w}_s$ from case 1, (A15) and (A16), and from case 2, (A20) and (A21), both recover the correct expressions for  $\bar {Q}$ and
$\bar {Q}$ and  $\bar {w}_s$ in case 3, so either can be used.
$\bar {w}_s$ in case 3, so either can be used.
Case 4.  $\partial _{\bar {z}}p=0$. When
$\partial _{\bar {z}}p=0$. When  $\partial _{\bar {z}}p=0$, there is exactly one solution to
$\partial _{\bar {z}}p=0$, there is exactly one solution to  $\bar {\tau }_{rz}=\bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}\varGamma )$ and no other solutions to
$\bar {\tau }_{rz}=\bar {\operatorname {\mathcal {B}}}\operatorname {sgn}(\partial _{\bar {z}}\varGamma )$ and no other solutions to  $|\bar {\tau }_{rz}|=\bar {\operatorname {\mathcal {B}}}$ in
$|\bar {\tau }_{rz}|=\bar {\operatorname {\mathcal {B}}}$ in  $r>0$. The solution corresponds to
$r>0$. The solution corresponds to  $r=\varPsi _-$. We can deduce from (A7) that
$r=\varPsi _-$. We can deduce from (A7) that  $\varPsi _-=\min (1,\max [R,R\operatorname {\mathcal {M}}|\varGamma _z|/\bar {\operatorname {\mathcal {B}}}])$, and we always have
$\varPsi _-=\min (1,\max [R,R\operatorname {\mathcal {M}}|\varGamma _z|/\bar {\operatorname {\mathcal {B}}}])$, and we always have  $\varPsi _+=1$. This is consistent with the behaviour in cases 1 and 2 as
$\varPsi _+=1$. This is consistent with the behaviour in cases 1 and 2 as  $\partial _{\bar {z}}p\rightarrow 0$. The velocity,
$\partial _{\bar {z}}p\rightarrow 0$. The velocity,  $\bar {w}$, can be derived using a similar procedure as in the cases above: we equate (A7) and (A9) in
$\bar {w}$, can be derived using a similar procedure as in the cases above: we equate (A7) and (A9) in  $R\leq r\leq \varPsi _-$, solve for
$R\leq r\leq \varPsi _-$, solve for  $\partial _r{\bar {w}}$, then integrate and apply no slip at
$\partial _r{\bar {w}}$, then integrate and apply no slip at  $r=\varPsi _-$ to get
$r=\varPsi _-$ to get  $\bar {w}$. We have
$\bar {w}$. We have  $\bar {w}=0$ in
$\bar {w}=0$ in  $\varPsi _-\leq r \leq 1$. Again, we integrate the velocity to get the flux,
$\varPsi _-\leq r \leq 1$. Again, we integrate the velocity to get the flux,
 \begin{equation} \bar{Q} = - \frac{1}{4}R\operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)F_2 + \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}\varGamma)F_4, \end{equation}
\begin{equation} \bar{Q} = - \frac{1}{4}R\operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)F_2 + \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}\varGamma)F_4, \end{equation}
and evaluate  $\bar {w}$ at
$\bar {w}$ at  $r=R$ to get the surface velocity,
$r=R$ to get the surface velocity,
 \begin{equation} \bar{w}_s = \operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)RG_2 - \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}\varGamma)G_4, \end{equation}
\begin{equation} \bar{w}_s = \operatorname{\mathcal{M}}(\partial_{\bar{z}}\varGamma)RG_2 - \bar{\operatorname{\mathcal{B}}}\operatorname{sgn}(\partial_{\bar{z}}\varGamma)G_4, \end{equation}in case 4.
We have now derived expressions for the axial volume flux and surface velocity in all cases, and so have closed the evolution equations (A4) and (A5). Finally, the lateral boundary conditions (2.8), at leading order in  $\delta$, imply
$\delta$, imply
 \begin{equation} \partial_{\bar{z}}R = \bar{Q} = \bar{w}_s\varGamma, \quad\mbox{on}\ \bar{z} = \bar{L}. \end{equation}
\begin{equation} \partial_{\bar{z}}R = \bar{Q} = \bar{w}_s\varGamma, \quad\mbox{on}\ \bar{z} = \bar{L}. \end{equation}Equations (2.27)–(2.33) are presented in terms of the unscaled variables (2.9), but they are entirely equivalent to what is derived here.
Appendix B. Rankine–Hugoniot condition for shock propagation speed
Suppose we observe a jump discontinuity in  $\varGamma _z$ at the point
$\varGamma _z$ at the point  $z=z_s(t)$, and denote the size of the jump by
$z=z_s(t)$, and denote the size of the jump by  $[\varGamma _z]^+_-$. Then we can use the following argument to derive a Rankine–Hugoniot condition (see, e.g. Billingham & King Reference Billingham and King2001) for the speed of propagation of the discontinuity. Define two points,
$[\varGamma _z]^+_-$. Then we can use the following argument to derive a Rankine–Hugoniot condition (see, e.g. Billingham & King Reference Billingham and King2001) for the speed of propagation of the discontinuity. Define two points,  $z_1$ and
$z_1$ and  $z_2$, such that
$z_2$, such that  $0< z_1< z_s(t)< z_2< L$. Then the surfactant transport equation (2.43) implies
$0< z_1< z_s(t)< z_2< L$. Then the surfactant transport equation (2.43) implies
 \begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\int_{z_1}^{z_2}\varGamma_z\,\mathrm{d}z= - \left[\left(\tilde{w}_s\varGamma\right)_z\right]_{z_1}^{z_2}. \end{equation}
\begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\int_{z_1}^{z_2}\varGamma_z\,\mathrm{d}z= - \left[\left(\tilde{w}_s\varGamma\right)_z\right]_{z_1}^{z_2}. \end{equation}Splitting the integral in (B1) and expanding, we get
 \begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\left(\int_{z_1}^{z_s}\varGamma_z\,\mathrm{d}z+\int_{z_s}^{z_2}\varGamma_z\,\mathrm{d}z\right) = - \frac{\mathrm{d}z_s}{\mathrm{d}t}\left[\varGamma_z\right]_{z_1}^{z_2} + \int_{z_1}^{z_s}\varGamma_{tz}\,\mathrm{d}z+\int_{z_s}^{z_2}\varGamma_{tz}\,\mathrm{d}z.\end{equation}
\begin{equation} \frac{\mathrm{d}}{\mathrm{d}t}\left(\int_{z_1}^{z_s}\varGamma_z\,\mathrm{d}z+\int_{z_s}^{z_2}\varGamma_z\,\mathrm{d}z\right) = - \frac{\mathrm{d}z_s}{\mathrm{d}t}\left[\varGamma_z\right]_{z_1}^{z_2} + \int_{z_1}^{z_s}\varGamma_{tz}\,\mathrm{d}z+\int_{z_s}^{z_2}\varGamma_{tz}\,\mathrm{d}z.\end{equation}
Then taking  $z_1\rightarrow z_s^-$ and
$z_1\rightarrow z_s^-$ and  $z_2\rightarrow z_s^+$, (B1) and (B2) imply
$z_2\rightarrow z_s^+$, (B1) and (B2) imply
 \begin{equation} \frac{\mathrm{d}z_s}{\mathrm{d}t}\left[\varGamma_z\right]_ - ^+ = \left[\left(\tilde{w}_s\varGamma\right)_z\right]_ - ^+, \end{equation}
\begin{equation} \frac{\mathrm{d}z_s}{\mathrm{d}t}\left[\varGamma_z\right]_ - ^+ = \left[\left(\tilde{w}_s\varGamma\right)_z\right]_ - ^+, \end{equation}which defines the shock propagation speed
 \begin{equation} u_s \equiv \frac{\mathrm{d}z_s}{\mathrm{d}t} = \frac{\left[\left(\tilde{w}_s\varGamma\right)_z\right]_ - ^+}{\left[\varGamma_z\right]_ - ^+}.\end{equation}
\begin{equation} u_s \equiv \frac{\mathrm{d}z_s}{\mathrm{d}t} = \frac{\left[\left(\tilde{w}_s\varGamma\right)_z\right]_ - ^+}{\left[\varGamma_z\right]_ - ^+}.\end{equation}The velocity (B4) can, in theory, be integrated to get the shock location,
 \begin{equation} z_s(t) = z_s(t_0) + \int_{t_0}^tu_s(t')\,\mathrm{d}t', \end{equation}
\begin{equation} z_s(t) = z_s(t_0) + \int_{t_0}^tu_s(t')\,\mathrm{d}t', \end{equation}
if the location of the shock is known at some time,  $t_0$. We have used (B5) to provide a consistency check on numerical simulations. For example, for the simulation shown in figure 3(a), we take
$t_0$. We have used (B5) to provide a consistency check on numerical simulations. For example, for the simulation shown in figure 3(a), we take  $t_0=69.2$, which is shortly after the interface-adjacent yielded region first appears, we take the value of
$t_0=69.2$, which is shortly after the interface-adjacent yielded region first appears, we take the value of  $z_s(t_0)$ from the simulation and we use the values for
$z_s(t_0)$ from the simulation and we use the values for  $[\tilde {w}_s\varGamma _z]_-^+$ and
$[\tilde {w}_s\varGamma _z]_-^+$ and  $[\varGamma _z]_-^+$ also from the simulation. Doing this, we find that the prediction of the location of either shock computed via (B5) never deviates from the shock location in the simulation by more than three grid points (when using
$[\varGamma _z]_-^+$ also from the simulation. Doing this, we find that the prediction of the location of either shock computed via (B5) never deviates from the shock location in the simulation by more than three grid points (when using  $200$ points), providing evidence that the numerical scheme is capturing the speed of shock propagation. Since we can only calculate
$200$ points), providing evidence that the numerical scheme is capturing the speed of shock propagation. Since we can only calculate  $u_s$ by using values from the numerical simulation, this does not provide independent validation of the numerical method. However, it does provide evidence that at each instant, the shock propagation velocity is being accurately calculated in the numerical scheme from the finite differenced derivatives and that spurious behaviour is not being introduced by the numerical scheme.
$u_s$ by using values from the numerical simulation, this does not provide independent validation of the numerical method. However, it does provide evidence that at each instant, the shock propagation velocity is being accurately calculated in the numerical scheme from the finite differenced derivatives and that spurious behaviour is not being introduced by the numerical scheme.
Appendix C. Thin-film dynamics at large $M$

Consider the thin-film equations (2.41)–(2.45) in the limit of very strong surfactant. We propose the expansions
 \begin{align} \left. \begin{gathered} H = \mathcal{H}_0 + \frac{1}{M}\mathcal{H}_1+\cdots,\quad \tilde{p} = \tilde{p}_0 + \frac{1}{M}\tilde{p}_1+\cdots,\quad \tilde{w}_s = \tilde{w}_0 + \frac{1}{M}\tilde{w}_1 + \cdots,\\ \varGamma = \tilde{\mathcal{G}}_0 + \frac{1}{M}\tilde{\mathcal{G}}_1+\cdots,\quad Y_- = {Y}_{ - 0} + \frac{1}{M}{Y}_{ - 1}+\cdots,\quad Y_+ = {Y}_{ + 0} + \frac{1}{M}{Y}_{ + 1}+\cdots, \end{gathered} \right\} \end{align}
\begin{align} \left. \begin{gathered} H = \mathcal{H}_0 + \frac{1}{M}\mathcal{H}_1+\cdots,\quad \tilde{p} = \tilde{p}_0 + \frac{1}{M}\tilde{p}_1+\cdots,\quad \tilde{w}_s = \tilde{w}_0 + \frac{1}{M}\tilde{w}_1 + \cdots,\\ \varGamma = \tilde{\mathcal{G}}_0 + \frac{1}{M}\tilde{\mathcal{G}}_1+\cdots,\quad Y_- = {Y}_{ - 0} + \frac{1}{M}{Y}_{ - 1}+\cdots,\quad Y_+ = {Y}_{ + 0} + \frac{1}{M}{Y}_{ + 1}+\cdots, \end{gathered} \right\} \end{align}
as  $M\rightarrow \infty$. The Marangoni force at the interface must be finite in the limit
$M\rightarrow \infty$. The Marangoni force at the interface must be finite in the limit  $M\rightarrow \infty$, so we require
$M\rightarrow \infty$, so we require  $|M\varGamma _z|<\infty$. This implies
$|M\varGamma _z|<\infty$. This implies  $\tilde {\mathcal {G}}_{0,z}=0$ and conservation of total mass of surfactant then means we must have
$\tilde {\mathcal {G}}_{0,z}=0$ and conservation of total mass of surfactant then means we must have
 \begin{equation} \tilde{\mathcal{G}}_0=1.\end{equation}
\begin{equation} \tilde{\mathcal{G}}_0=1.\end{equation}
Inserting (C1) into the surfactant transport equation (2.43), and using (C2), implies  $\tilde {w}_{0,z}=0$. Combined with the boundary condition (2.45) which enforces
$\tilde {w}_{0,z}=0$. Combined with the boundary condition (2.45) which enforces  $\tilde {w}_0\tilde {\mathcal {G}}_0=0$ at
$\tilde {w}_0\tilde {\mathcal {G}}_0=0$ at  $z=\{0,L\}$, we get
$z=\{0,L\}$, we get
 \begin{equation} \tilde{w}_0=0. \end{equation}
\begin{equation} \tilde{w}_0=0. \end{equation}This means that in the limit of strong surfactant, the interface of the thin film is essentially immobilised by Marangoni effects. Inserting (C3) into the expression for surface velocity (2.44), and rearranging, gives
 \begin{equation} \mathcal{H}_0 - Y_{ + 0} = Y_{ - 0},\end{equation}
\begin{equation} \mathcal{H}_0 - Y_{ + 0} = Y_{ - 0},\end{equation}
assuming  $\tilde {p}_{0,z}\neq 0$. The result (C4) says that the wall-adjacent and interface-adjacent fully yielded regions always have the same thickness in the leading-order theory. This also means that only yielding of types I or V can occur. We will assume for now that the fluid is yielded, so
$\tilde {p}_{0,z}\neq 0$. The result (C4) says that the wall-adjacent and interface-adjacent fully yielded regions always have the same thickness in the leading-order theory. This also means that only yielding of types I or V can occur. We will assume for now that the fluid is yielded, so  $Y_->0$ and
$Y_->0$ and  $Y_+< H$, and then subsequently present criteria for when the fluid rigidifies.
$Y_+< H$, and then subsequently present criteria for when the fluid rigidifies.
The definition (2.40) gives
 \begin{equation} {Y}_{\pm0} = \mathcal{H}_0 \pm \frac{B}{|\tilde{p}_{0,z}|} + \frac{\tilde{\mathcal{G}}_{1,z}}{\tilde{p}_{0,z}}, \end{equation}
\begin{equation} {Y}_{\pm0} = \mathcal{H}_0 \pm \frac{B}{|\tilde{p}_{0,z}|} + \frac{\tilde{\mathcal{G}}_{1,z}}{\tilde{p}_{0,z}}, \end{equation}which, when combined with (C4), implies
 \begin{equation} \tilde{\mathcal{G}}_{1,z} + \frac{1}{2}\mathcal{H}_0\tilde{p}_{0,z}=0. \end{equation}
\begin{equation} \tilde{\mathcal{G}}_{1,z} + \frac{1}{2}\mathcal{H}_0\tilde{p}_{0,z}=0. \end{equation}
Note that for certain choices of initial conditions,  $\tilde {\mathcal {G}}_1$ may not initially satisfy (C6), in which case we expect there to be a rapid adjustment at early times to a state where (C6) is satisfied. For an arbitrary choice of initial
$\tilde {\mathcal {G}}_1$ may not initially satisfy (C6), in which case we expect there to be a rapid adjustment at early times to a state where (C6) is satisfied. For an arbitrary choice of initial  $\varGamma$, the change in
$\varGamma$, the change in  $\varGamma$ required to reach a state satisfying (C6) is of size
$\varGamma$ required to reach a state satisfying (C6) is of size  $O(1/M)$, so we expect the time scale for the adjustment to this state to be of size
$O(1/M)$, so we expect the time scale for the adjustment to this state to be of size  $O(1/M)$ also, since the initial surface velocity would be of size
$O(1/M)$ also, since the initial surface velocity would be of size  $O(1)$ during the adjustment period.
$O(1)$ during the adjustment period.
At leading order, the axial volume flux (2.42) is
 \begin{equation} q = \frac{1}{6}\tilde{p}_{0,z}Y_{ - 0}^2\left(2Y_{ - 0}-3\mathcal{H}\right). \end{equation}
\begin{equation} q = \frac{1}{6}\tilde{p}_{0,z}Y_{ - 0}^2\left(2Y_{ - 0}-3\mathcal{H}\right). \end{equation}If we define the function
 \begin{equation} \tilde{\mathcal{Y}} \equiv \frac{1}{2}H - \frac{B}{|\tilde{p}_z|},\end{equation}
\begin{equation} \tilde{\mathcal{Y}} \equiv \frac{1}{2}H - \frac{B}{|\tilde{p}_z|},\end{equation}
then from (C8),  $Y_{-0}=\tilde {\mathcal {Y}}$ to leading order when the fluid is yielded. Note that from (C4), the criterion for no yielding to occur in the leading order theory is
$Y_{-0}=\tilde {\mathcal {Y}}$ to leading order when the fluid is yielded. Note that from (C4), the criterion for no yielding to occur in the leading order theory is  $Y_{-0}=0$. Therefore, from (2.41) and (C7), the leading order evolution equation, which holds if fluid is yielded or unyielded, is (3.9). To reach (3.9), we have assumed so far that
$Y_{-0}=0$. Therefore, from (2.41) and (C7), the leading order evolution equation, which holds if fluid is yielded or unyielded, is (3.9). To reach (3.9), we have assumed so far that  $\tilde {p}_{z}\neq 0$, but we can see from (C6) that if
$\tilde {p}_{z}\neq 0$, but we can see from (C6) that if  $\tilde {p}_{0,z}=0$, then
$\tilde {p}_{0,z}=0$, then  $\tilde {\mathcal {G}}_{1,z}=0$, so there is no driving force. Therefore, (3.9) also holds when
$\tilde {\mathcal {G}}_{1,z}=0$, so there is no driving force. Therefore, (3.9) also holds when  $\tilde {p}_z=0$ since it says there is no motion in that case.
$\tilde {p}_z=0$ since it says there is no motion in that case.









































































































































 Open access
Open access